
Abstract
In theoretical ecology, recent field experiments on terrestrial vertebrates observe that the predator–prey interaction can not only be curtailed by direct consumption but also governed by some indirect effects such as the fear of predator which may reduce the reproduction rate of prey individuals. Based on this fact, we have developed and explored the predator–prey interaction with the influence of both cost and benefit of fear effect (felt by prey). A Holling type III functional response with the effect of habitat complexity has been taken to consume the prey biomass. Positivity and boundedness of the studied system prove that the model is well-behaved. The uniform persistence of the studied system is derived analytically under some parametric restrictions. The feasibility conditions and stability criteria of each equilibrium points have been discussed. Next, we have exhibited the existence of Hopf-bifurcation around the interior equilibrium point. Our mathematical analyses show that habitat complexity and fear effect both have a great impact on the persistence of the predator biomass. Furthermore, we have investigated the effect of breeding delay parameter such that the system loses its stability behaviour and enters into a limit cycle oscillations through Hopf-bifurcation. Numerical simulations are illustrated to verify our analytical outcomes. Numerically, we have perturbed the death rates of prey and predator species with Gaussian white noise terms due to the effects of environmental fluctuations.



























Similar content being viewed by others
Data Availability
The data used to support the findings of the study are available within the article.
References
August PV (1983) The role of habitat complexity and heterogeneity in structuring tropical mammal communities. Ecology 64:1495–1507
Beretta E, Kuang Y (1996) Convergence results in a well known delayed predator-prey system. J Math Anal Appl 204:840–853
Canion CR, Heck KL (2009) Effect of habitat complexity on predation success: re-evaluating the current paradigm in seagrass beds. Mar Ecol Prog Ser 393:37–46
Creel S, Christianson D (2008) Relationships between direct predation and risk effects. Trends Ecol Evol 23(4):194–201
Creel S, Christianson D, Liley S, Winnie JA (2007) Predation risk affects reproductive physiology and demography of elk. Science 315(5814):960–960
Cresswell W (2010) Predation in bird populations. J Ornithol 152(S1):251–263
Dalziel BD, Thomann E, Medlock J, Leenheer PD (2020) Global analysis of a predator-prey model with variable predator search rate. J Math Biol 81:159–183
Das A, Samanta GP (2018) Modelling the fear effect on a stochastic prey-predator system with additional food for predator. J Phys A: Math Theor 51:465601
Freedman HI, Rao VSH (1983) The trade-off between mutual interference and time lags in predator-prey systems. Bull Math Biol 45:991–1004
Freedman HI, Ruan S (1995) Uniform persistence in functional differential equations. J Differ Equ 115:173–192
Hale JK (1977) Theory of functional differential equations. Springer, New York
Holling CS (1959) The components of predation as revealed by a study of small-mammal predation of the European pine sawfly. Can Entomol 91(5):293–320
Holling CS (1959) Some characteristics of simple types of predation and parasitism. Can Entomol 91(7):385–398
Holling CS (1965) The functional response of predators to prey density and its role in mimicry and population regulation. Mem Entomol Soc Can 97(S45):5–60
Kuang Y (1993) Delay differential equation with application in population dynamics. Academic Press, NY
Kuang Y, Freedman HI (1988) Uniqueness of limit cycles in Gauss-type models of predator-prey systems. Math Biosci 88:67–84
Lima SL (1998) Nonlethal effects in the ecology of Predator-Prey interactions: what are the ecological effects of anti-predator decision-making? Bioscience 48(1):25–34
Lotka AJ (1920) Elements of physical biology. Williams and Wilkins, Baltimore
Ma Z, Wang S (2018) A delay-induced predator-prey model with Holling type functional response and habitat complexity. Nonlinear Dyn 93:1519–1544
Malthus TR (1798) An essay on the principle of population as it affects the future improvement of society, with remarks on the speculations of Mr. Godwin, M. Condorcet, and other writers. The Lawbook Exchange, Ltd
Mao X (2007) Stochastic differential equations and applications. Horwood Publishing, Chichester
Meiss JD (2007) Differential dynamical systems. Society for Industrial and Applied Mathematics, Philadelphia
Mondal S, Maiti A, Samanta GP (2018) Effects of fear and additional food in a delayed predator-prey model. Biophys Rev Lett 13(4):157–177
Mondal S, Samanta GP (2020) Dynamics of a delayed predator-prey interaction incorporating nonlinear prey refuge under the influence of fear effect and additional food. J Phys A: Math Theor 53:295601
Mondal S, Samanta G (2021) Time-delayed predator-prey interaction with the benefit of antipredation response in presence of refuge. Zeitschrift fur Naturforschung A 76:23–42. https://doi.org/10.1515/zna-2020-0195
Mondal S, Samanta GP (2021) Impact of fear on a predator-prey system with prey-dependent search rate in deterministic and stochastic environment. Nonlinear Dyn 104:2931–2959. https://doi.org/10.1007/s11071-021-06435-x
Murray JD (1993) Mathematical biology. Springer, New york
Perko L (2001) Differential equations and dynamical systems. Springer, New York
Rosenzweig ML, MacArthur RH (1963) Graphical representation and stability conditions of predator-prey interactions. Am Nat 97:209–223
Verhulst PF (1838) Notice sur la loi que la population poursuit dans son accroissement. Correspondance mathématique et physique 10:113–121
Volterra V (1926) Variazioni e fluttuazioni del numero d’individui in specie animali conviventi. Memorie della Reale Accademia Nazionale dei Lincei 6:31–113
Wang Y, Zou X (2020) On a predator-prey system with digestion delay and anti-predation strategy. J Nonlinear Sci 30:1579–1605
Wang X, Zanette L, Zou X (2016) Modelling the fear effect in predator-prey interactions. J Math Biol 73:1179–1204
Wang S, Tang H, Ma Z (2021) Hopf bifurcation of a multiple-delayed predator-prey system with habitat complexity. Math Comput Simul 180:1–23
Winfield IJ (1986) The influence of simulated aquatic macrophytes on the zooplankton consumption rate of juvenile roach, Rutilus rutilus, rudd, Scardinius erythrophthalmus, and perch, Perca fluviatilis. J Fish Biol 29:37–48
Zanette LY, Allen MC, White AF, Clinchy M (2011) Perceived predation risk reduces the number of offspring songbirds produce per year. Science 334(6061):1398–1401
Zhang H, Cai Y, Fu S, Wang W (2019) Impact of the fear effect in a prey-predator model incorporating a prey refuge. Appl Math Comput 356:328–337
Acknowledgements
The authors are grateful to the learned editor, reviewers and Professor Matthew Simpson (Editor-in-Chief) for their careful reading, valuable comments and helpful suggestions, which have helped them to improve the presentation of this work significantly. They are also thankful to Mr. Nirapada Santra, JRF, IIEST, Shibpur for helping to draw Fig. 2. The third author (Manuel De la Sen) is grateful to the Spanish Government for its support through Grant RTI2018-094336-B-I00 (MCIU/AEI/FEDER, UE) and to the Basque Government for its support through Grant IT1555-22.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest regarding this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Here, we will deduce the conditions for existence of equilibrium points and perform their stability analysis corresponding to system (3) (\(\theta =0\)).
System (3) has three feasible equilibrium points:
(i) \(\widetilde{E_0}(0, 0)\) (unstable), (ii) \(\widetilde{E_1}(k, 0)\) (LAS if \(m > 1-\frac{d_{2}}{\beta k^2 (\gamma -d_{2}h)}\)) and (iii) \({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\) where \({\widetilde{x}}=\sqrt{\frac{d_{2}}{\beta (1-m)(\gamma -d_{2}h)}}\) and \({\widetilde{y}}=\frac{\gamma r {\widetilde{x}}\left( 1-\frac{{\widetilde{x}}}{k}\right) }{d_{2}}\). Now, \({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\) exists if \(1-\frac{{\widetilde{x}}}{k} > 0 \displaystyle \Rightarrow 0< m < 1-\frac{d_{2}}{\beta k^2 (\gamma -d_{2}h)}\) provided \(d_{2} < \frac{\gamma }{h}\). Otherwise, \({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\) goes towards predator-free equilibrium point \(\widetilde{E_1}(k, 0)\). In ecological point of view, interior equilibrium point exists if the strength of habitat complexity is less than its threshold value \({\widetilde{m}}=1-\frac{d_{2}}{\beta k^2 (\gamma -d_{2}h)}\).
\({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\) has two eigenvalues with negative real parts if
Theorem 8.1
\({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\) of system (3) exists and is LAS if the strength of habitat complexity satisfies the following:
Now, we rewrite system (3) in the form:
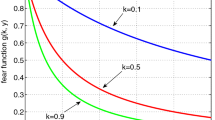
where \(g(x)=r\left( 1-\frac{x}{k}\right) \), \(p(x)=\frac{\beta (1-m) x^2}{1+\beta (1-m) h x^2}\).
Following Theorem 4.2 of Kuang and Freedman (1988), we arrive at Lemma 8.2:
Lemma 8.2
Suppose in system (38):
in \(0 \le x < {\widetilde{x}}\) and \({\widetilde{x}} < x \le k\). Then system (38) has unique limit cycle which is globally asymptotically stable in the set \(\left\{ (x, y)\big |x>0, y> 0\right\} \setminus \left\{ {\widetilde{E}}\right\} \), where \(g'(x)=\frac{\mathrm{d}}{\mathrm{d}x} g(x)\) and \(p'(x)=\frac{\mathrm{d}}{\mathrm{d}x}p(x)\).
Theorem 8.3
For system (3), if \( 0< m < 1-\frac{4d_{2}^3h^2}{\beta k^2(\gamma -d_{2}h)(2d_{2}h-\gamma )^2 }\), then \({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\) is unstable in int \({\mathbb {R}}_{+}^2\) and there exists a unique stable limit cycle which is globally asymptotically stable.
Proof
Proof is similar of Theorem 4.2.1 in Wang et al. (2021). \(\square \)
Remark 1
\({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\) of system (3) is globally asymptotically stable if
Remark 2
When the prey and predator population coexist at \({\widetilde{E}}({\widetilde{x}}, {\widetilde{y}})\), the biomass of both the prey and predator population depend on the parameter m (strength of habitat complexity). We have: \(\frac{\mathrm{d}{\widetilde{x}}}{\mathrm{d}m}=\sqrt{\frac{d_{2}}{\beta \left\{ \gamma -d_{2}h\right\} }}\left( \frac{1}{2(1-m)^\frac{3}{2}}\right) >0 \text { since } m \in (0, 1)\), i.e. increasing the value of m can increase the biomass of prey population.
Similarly, we have: \(\frac{\mathrm{d}{\widetilde{y}}}{\mathrm{d}m}=\frac{\gamma r}{d_2}\left( 1-\frac{2{\widetilde{x}}}{k}\right) \frac{\mathrm{d}{\widetilde{x}}}{\mathrm{d}m}<0 \text { if } m > 1-\frac{4d_{2}}{\beta k^2\left\{ \gamma -d_{2}h\right\} }\), i.e. \({\widetilde{y}}\) is a decreasing function of m when \(m \in \left( 1-\frac{4d_{2}}{\beta k^2\left\{ \gamma -d_{2}h\right\} }, 1-\frac{d_{2}}{\beta k^2\left\{ \gamma -d_{2}h\right\} }\right) \).
Appendix B
Using the transformation \(x=X+{\widehat{x}}\) and \(y=Y+{\widehat{y}}\), system (20) can be rewritten as follows:
At the interior equilibrium point \(({\widehat{x}}, {\widehat{y}})\),
So, the linearization of system (20) at \(({\widehat{x}}, {\widehat{y}})\) has the form:
where \(Z=[X, Y]^T\), \(A_{1}^{'}=\begin{bmatrix} c_{2} &{} c_{3}\\ 0&{} 0 \end{bmatrix}\) and \(A_{2}^{'}=\begin{bmatrix} q_{11}+ c_{1} &{} c_{4} \\ q_{21} &{} q_{22} \end{bmatrix}\), \(c_{1}=-\frac{b}{1+\theta {\widehat{y}}}\), \(c_{2}=\frac{b}{1+\theta {\widehat{y}}}\), \(c_{3}=-\frac{b\theta {\widehat{x}}}{\left( 1+\theta {\widehat{y}}\right) ^2}\), \(c_{4}=q_{12}+\frac{b\theta {\widehat{x}}}{\left( 1+\theta {\widehat{y}}\right) ^2}\), \(q_{11}={\widehat{x}}\left\{ -a-\frac{\beta (1-m){\widehat{y}}\left[ 1-\beta (1-m)h {\widehat{x}}^2\right] }{\left( 1+\beta (1-m)h{\widehat{x}}^2\right) ^2(1+\theta )}\right\} \), \(q_{12}=-\frac{b\theta {\widehat{x}}}{(1+\theta {\widehat{y}})^2}-\frac{\beta (1-m){\widehat{x}}^2}{\left( 1+\beta (1-m)h{\widehat{x}}^2\right) (1+\theta )}\), \(q_{21}=\frac{2\gamma \beta (1-m){\widehat{x}}{\widehat{y}}}{\left( 1+\beta (1-m)h{\widehat{x}}^2\right) ^2(1+\theta )}\) and \(q_{22}=0\).
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Mondal, S., Samanta, G. & De la Sen, M. A Comparison Study of Predator–Prey Model in Deterministic and Stochastic Environments with the Impacts of Fear and Habitat Complexity. Bull Math Biol 84, 115 (2022). https://doi.org/10.1007/s11538-022-01067-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11538-022-01067-7