
Abstract
Development of self-burrowing probes that can penetrate soils without the aid of external reaction force from drill rigs and trucks would facilitate site characterization activities and deployment of sensors underneath existing structures and in locations with limited access (e.g., toe of dams, extraterrestrial bodies). Successful deployment of self-burrowing probes in the field will require several cycles of expansion, penetration, and contraction motions due to the geometric constraints and the increase in soil strength with depth. This study explores the multi-cycle performance of a dual-anchor self-burrowing probe in granular assemblies of varying density using discrete element modeling simulations. The simulated probe consists of an expandable top shaft, expandable bottom shaft, and a conical tip. The expansion of the shafts are force-controlled, the shaft contraction and tip advancement are displacement-controlled, and the horizontal tip oscillation is employed to reduce the penetration resistance. The performance of the self-burrowing probe in terms of self-burrowing distance is greater in the medium dense specimen than in the dense and loose specimens due to the high magnitude of anchorage force in comparison with penetration resistance. For all three soil densities, most of the mechanical work is done by tip oscillation; however, this accounts for a greater percentage of the total work in the denser specimen. Additionally, while tip oscillation aids in enabling self-burrowing to greater depths, it also produces a greater work demand. The results presented here can help evaluate the effects of soil density on probe prototypes and estimate the work requited for self-burrowing.
Similar content being viewed by others


Explore related subjects
Find the latest articles, discoveries, and news in related topics.Avoid common mistakes on your manuscript.
1 Introduction
The fields of bio-inspired and bio-mediated geotechnics have received increasing attention in recent years due to the growing need for developing efficient solutions for geotechnical engineering problems [16, 30]. Conventional soil penetration activities in geotechnical engineering usually require energy-intensive equipment with large reaction masses (e.g., [31]), which can cause accessibility challenges for certain sites, such as urban and forested areas, toe of dams, and outer-space bodies, and have negative environmental and economic impacts (e.g., [36, 38]). While light-weight device such as the portable dynamic penetrometer has been developed to address limited access issues, the low driving energy and limited penetration depth remain as challenges (e.g., [20, 28, 42]). In recent years, a new family of self-burrowing probes inspired by earthworms, caecilians, and clams have been the focus of many investigations.
Two common burrowing strategies used by animals are peristalsis locomotion and the ‘dual-anchor mechanism.’ Soft-bodied animals like earth and marine worms that use peristalsis locomotion have circular and longitudinal muscles that allow them to form alternating waves of elongation and shortening that propagate along their body to mobilize reaction forces and push their bodies forward [18, 19, 22]. Bivalves, such as razor clams, use the ‘dual-anchor’ mechanism, consisting of alternating penetrating (shell) and terminal (pedal or foot) anchors [17, 43,44,45]. The shell is first expanded to form an anchor to provide reaction for penetration with the foot. Then, the foot is expanded to form a second anchor and the shell is contracted and retracted.
Researchers have performed experimental and numerical investigations on bio-inspired self-burrowing probes. Overall, these investigations have demonstrated the feasibility of implementing bio-inspired strategies to enable self-burrowing by probes and robots [41]. For instance, Winter et al. [46] developed a razor clam-inspired probe capable of burrowing in sands by local fluidization. Tao et al. [40] developed a razor clam-inspired probe which exhibited the ability of burrowing out of sands. Cortes and John [15] and Naclerio et al. [33] performed penetration tests of earthworm- and root-inspired probes that reduce the penetration resistance in sandy soils. Ortiz et al. [34] performed experimental penetration tests on a polychaete-inspired soft robot which reduced the resistance force by radial expansion and bi-directional bending. Zhong et al. [52] performed penetration tests of horizontally aligned burrowing robots and demonstrated that both asymmetric probe geometry and kinematics facilitate horizontal advancement.
Numerical methods, such as discrete element modeling (DEM), have also been used to perform bio-inspired studies since it can provide multi-scale data of soil responses and interactions between soils and probes. For example, Huang and Tao [23], Huang et al. [24], and Chen et al. [4,5,6] presented DEM results of a razor clam-inspired probe, showing that the radial anchor expansion led to a reduction in tip penetration force. Chen et al. [7] simulated probes with one and two anchors, and concluded that while the total anchorage force is greater for the two-anchor case, the capacity per anchor is greater for the single-anchor case when the anchor spacing is smaller than six probe diameters. Martinez et al. [29] performed cavity expansion analyses, concluding that the most challenging conditions for self-burrowing are dense sandy soils.
The aforementioned numerical studies have implemented a number of simplifications which may affect the accurate estimation on the probes’ self-burrowing ability. One simplification is using displacement-controlled or velocity-controlled with force limits motions for the probe, which do not explicitly consider the mobilization of the reaction forces needed to overcome the penetration resistance forces. A second simplification is that while multiple self-burrowing cycles will be required during field deployment to reach depths of interest, past studies have only simulated a single cycle. Finally, the effect of soil density on the self-burrowing process has not been thoroughly investigated despite the fact that previous work has shown its important effects (e.g., [29]).
The DEM study presented herein aims to investigate the effects of soil density on multi-cycle self-burrowing. Therefore, algorithms that control the probe’s motion using the balance of forces between the probe and particles are employed in these simulations to show how the self-burrowing ability depends on the ratio of reaction to penetration resistance forces. Particle-level quantities, such as contact forces and particle displacements, and calculated mechanical work are used to highlight differences in the probe-particle interactions for the different self-burrowing stages in specimens of varying density.
2 DEM Model
2.1 Modeling parameters
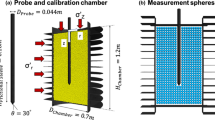
The DEM model was developed in the PFC3D software [25], consisting of a cylindrical chamber, bottom wall, bio-inspired probe, and particles (Fig. 1a). The chamber diameter (Dc) and height (Hc) are both equal to 0.7 m, and its walls are rigid and fixed throughout the simulations. The simulated particles are upscaled from an experimentally measured particle size distribution (PSD) of Fontainebleau sand and are modeled using spheres. In the simulations, there are about 138,000 to 166,000 particles in the chamber, depending on the density of the specimen. The particle sizes were upscaled by five different scaling factors from the center to the boundary following the particle refinement method (PRM) [10, 23, 32, 39]. This method increases the number of contacts between the particles and the probe in the center zone while it reduces the number of particles in the whole system to reduce the computational cost. The mean particle size (D50) in the center zone is 6.3 mm (i.e., upscaled 30 times from the experimental PSD) and the particle sizes gradually increase from the inner zones to the outer zones with a factor of 1.5 or 1.2, as shown in Fig. 1b. Previous studies that use the PRM method (have shown that the particle size increasing factors that are smaller than 1.5 led to minimal particle immigration among adjacent zones (e.g., [3, 21, 32, 39]). Chen [8] reported that while the PRM method does not affect the average penetration resistance magnitudes, it helps smoothen the trends due to the greater number of probe-particle contacts in comparison to simulations with a uniform zone of coarser particles. The soil within each zone has a coefficient of uniformity (Cu) of 1.7, a coefficient of curvature (Cc) of 1.2, and the particle density is 2.65 g/cm3.

DEM simulation configuration. a simulated bio-inspired probe, virtual calibration chamber and particles; b PSD of Fontainebleau sand and upscaled PSDs in 5 zones in DEM simulations; c validation of the DEM contact model for Fontainebleau sand via DEM simulation of high pressure oedometric compression tests (after [49])
The probe consists of three shafts and one conical tip, which are modeled using rigid wall elements and there are no interactions between them. The bottom and middle shafts have a diameter (Db) of 35.6 mm, while the top shaft has a slightly larger diameter (Ds) of 37.4 mm. This larger diameter is required to avoid repeated calculation of probe-particle contacts and forces at the overlapping section between the top and the middle shafts (Fig. 1a). The total length of the probe is seven times of the top shaft diameter (7Db), with the length of the top, middle and bottom shafts being 5Db, 1Db and 1Db, respectively. The middle shaft is embedded into the top shaft with a length of 5Db. The tip apex angle is 60° and the probe density is taken as that of steel (i.e., 8.05 g/cm3).
In DEM simulations of penetration processes, the chamber-to-probe diameter (Dc/Ds) and probe-to-particle diameter ratios (Ds/D50) should have sufficiently large values to minimize boundary and particle scale effects. In this study, the Dc/Ds value is 18.7 and the Ds/D50 value in the center zone with smaller particles is 5.9, which produces the number of contacts (NC) between the cone and particles ranging from 23 to 39 during the self-burrowing simulations. These values are greater than values commonly employed in previous DEM studies on soil penetration problems. For example, the Dc/Ds values ranged from 12.0 to 16.6 and Dprobe/D50 values ranged from 2.7 to 3.1 in the 3D simulations from [1, 2, 9, 11, 23, 27, 47, 48], which produce the NC about 15 between the cone and particles.
The contact model developed by Zhang et al. [49] is used to simulate the behavior of Fontainebleau sand. This model was developed based on the standard Hertzian model. The slip behavior at contacts is controlled by a friction coefficient (µ) and each contact has a non-linear stiffness determined by particles' shear modulus (G) and Poisson’s ratio (v). The simulation parameters are listed in Table 1. The particles have a G of 32 GPa and v of 0.19. The particle friction coefficient is 0.275 (\(\mu\)) and the particle rotation is inhibited to simulate the effects of particle angularity, as previously done in [12, 13, 49, 50]. The chamber wall friction coefficient is 0.0, while the wall values of G and \(\mu\) are same as those for the particles. The simulated probe has a G of 74 GPa, a v of 0.265 and a friction coefficient (\({\mu }_{\mathrm{p}}\)) of 0.35. Figure 1c (after [49]) compares the DEM results of an experimental oedometric compression test with that of a DEM simulation to stresses of about 100 MPa from [12]. It should be noted that the soil crushing was reported at high stresses in the experiments, the particles simulated in DEM were not allowed to crush. Therefore, the simulated response matches the experimental one at stresses smaller than about 30 MPa. Since the stresses in the simulation remain well-below 30 MPa, particle crushing is not expected to have an important effect. A more detailed calibration parameters can be found in [49].
2.2 Specimen generation
The number of particles in a specimen is calculated based on the desired specimen void ratio (e) and chamber size. The particles are first generated within the chamber using the radius expansion method (REM), where the particle radii are multiplied by a given factor to generate the desired PSD and a uniform isotropic stress state [35]. At this stage, the G and v are assigned to the walls and particles. The system is then cycled until an initial stress of zero and system equilibrium are both achieved. Afterward, the µ is assigned to the particles and gravity is activated, followed by system cycling until equilibrium is reached. Different µ are used to generate specimens with different void ratios (Table 2). In this study, µ of 0.05, 0.2, and 0.5 yielded specimens with e of 0.57, 0.69 and 0.77, respectively, which are referred to as ‘dense,’ ‘medium dense,’ and ‘loose’ specimens, respectively. After the specimen generation stage is finalized, the µ value is changed to 0.275 for the self-burrowing simulation (i.e., Table 1).
Once the specimen is settled under gravity, the sample quality is evaluated inspecting the distribution of particle groups, contact forces and void ratios. The specimen shown in Fig. 2a indicates that there was negligible migration of particles among the different zones using the particle refinement method. Contact force chains, depicting the normal interparticle contact forces where the color and line thickness are proportional to the force magnitude, indicate an increase in contact force magnitude with depth as well as differences due to the different particle sizes in the different zones (Fig. 2b). The soil void ratio maps present the average void ratios at the center of each element, which are measured using 49 measurement spheres placed on a vertical plane. The results show that the void ratios distribute uniformly in the center zone and the average value of void ratios increases from the dense to loose specimens (Fig. 2c).

Specimen quality after gravity settlement. a Particle groups in the particle refinement zones for the dense specimen; b contact force chains in the dense specimen; c spatial distribution maps of void ratio for the dense, medium dense, and loose specimens
3 Bio-inspired self-burrowing process
As presented by [51], a self-burrowing cycle can be divided into seven stages (Fig. 3): initial penetration (IP), top shaft expansion (SE), tip penetration with oscillation (TPO), bottom shaft expansion (BE), shaft contraction (SC), shaft retraction (SR), and bottom shaft contraction (BC). It is noted that the IP stage is only performed before the first self-burrowing cycle in order to achieve full embedment of the probe. The SE stage is needed for the probe to mobilize a reaction force for tip advancement, which is accomplished in the TPO stage with the aid of tip oscillation. The BE stage is needed to provide anchorage for retracting the top shaft in the SR stage. Figure 3 presents a schematic of one complete self-burrowing cycle, where the forces acting on the probe sections are marked with blue arrows and are labeled only once for clarity. The probe motion control algorithms and the simulation termination criteria for each stage are also defined in Fig. 3. It is assumed that during each self-burrowing stage the relevant probe segments move only with the motions specified in this stage, while the other motions of these segments and all motions of the other segments are restricted. The termination criteria were chosen based on limitations stemming from the probe geometry and expectations of limitations during field testing. These termination criteria are described in more detail in the proceeding section, and Table 3 provides a description of the logic for determining each termination criterion.

Schematic of the self-burrowing process. Control algorithms [displacement-controlled (D1–D3), force-controlled (F), displacement-controlled with oscillation (DO)] and termination criteria (C1–C10) for each stage. Note that a stage will be stopped if any one of its termination conditions is satisfied. Note that the initial penetration stage only occurs before the first self-burrowing cycle and the negative velocity represents either a downwards vertical or inwards radial velocity and that that the logic for checking the termination criteria in the control algorithms are not shown for clarity
3.1 Initial penetration stage
The IP stage consists of initial penetration and self-weight equilibrium of the bio-inspired probe. During the penetration, the entire probe is displaced downward from its initial position outside of the specimen to a tip depth of 0.34 m with a constant velocity of 0.4 m/s (D1 and C1 in Fig. 3). The tip resistance (qc) is calculated using Eq. 1:
where the \({F}_{z,\mathrm{t}}\) is the total vertical force acting on the conical tip, \({F}_{z,\mathrm{ti}}\) is the \(i\)th vertical component force on the conical tip, \(N\) is the number of contact forces on the tip, and \({D}_{\mathrm{b}}\) is the base diameter of the tip.
As shown in Fig. 4a for the dense, medium dense, and loose specimens, the probe mobilizes an average qc of 6.21 MPa, 2.16 MPa and 0.78 MPa at depths between 0.30 and 0.34 m, respectively. The qc increases by 2.88 times between the medium dense and dense specimens and it increases by 2.77 times between the loose and medium dense. These increases in qc are consistent with the change of normalized tip resistance with sand density from [31], which predicts an increase of about 2.5 times when the density increase by about 30%. The contact force chain maps depict the normal contact force magnitudes between particles, indicating greater magnitudes at locations near the probe tip which are especially evident in the dense specimen (Fig. 4b).

Initial penetration (IP) in specimens of varying Dr (sims. #1, #2, #3). a Evolution of tip resistance with depth; contact force chains at the end of the b quasi-static penetration and c self-weight equilibrium
During the self-weight equilibrium, the balance of forces acting on the probe and Newton’s second law are solved. Since the probe’s self-weight (Wall) (i.e., calculated as 21.8 N) is smaller than the initial penetration resistance force, the probe rebounds upwards to reach a vertical force balance. The upward movement of the probe leads to the relaxation of resistance forces near the tip, which is shown in the force chains at the end of self-weight equilibrium (Fig. 4c).
3.2 Self-burrowing stages
In this section, the probe motions in each self-burrowing stage are described and the results in the dense specimen (Simulation #1, Fig. 5) are used to illustrate the evolution of probe forces and displacements that take place in one self-burrowing cycle. In Fig. 5, the transitions between stages are indicated by vertical gray dashed lines and each stage is labeled for reference.

Evolution of probe forces and displacements with simulation steps during the initial self-burrowing cycle in the dense specimen (Simulation #1). a Penetration resistance force (Qz), vertical top shaft force (Fz), radial top shaft force (Fr,t), and radial bottom shaft force (Fr,s); b penetration displacements of the tip (δz,t) and the top shaft (δz,s); c expansion magnitude of the top (EMb) and the bottom shafts (EMs). Note that the simulation step was reset to zero after the initial penetration stage
The forces acting on the probe section are referred to as ‘Fm,n,’ with the first subscript m representing the direction of the force (i.e., r is radial and z is vertical) and the second subscript n representing the probe section that the force acts on (i.e., s is the top shaft, t is the tip, b is the bottom shaft and all is all three parts). This naming convention also applies to the displacements (\({\delta }_{m,n}\)) and velocities (\({v}_{m,n}\)) of the probe sections. For example, ‘Fr,s’ represents the radial force acting on the top shaft, ‘\({\delta }_{z,t}\)’ represents the vertical displacement of the tip, and ‘\({v}_{r,b}\)’ represents the radial velocity of the bottom shaft.
During the SE stage, the top shaft is expanded through a stepwise force-controlled algorithm. As shown in Fig. 3, the radial force on the top shaft (Fr,s) is monitored during the expansion process and the radial expansion acceleration is calculated based on the difference between the current Fr,s and the target force (Ftarget) using the Newton’s second law. The Ftarget is determined by applying a safety factor of 0.85 to the maximum Fr,s that is measured during top shaft expansion with a constant velocity of 0.02 m/s. The Ftarget values for the dense, medium dense and loose specimens are calculated to be 1.51 kN, 0.76 and 0.49 kN, respectively.
Once a given Ftarget is determined, the shaft is expanded to reach that force value through multiple steps and each step achieves an incremental loading of ΔF and maintains a constant Fr,s for 1000 steps prior to initiation of the next expansion step. The ΔF values of 0.3 kN, 0.15 kN, and 0.05 kN are employed to achieve the desired Ftarget in the dense, medium dense, and loose specimen, respectively, which were determined iteratively. It is noted that a smaller relative load increment (i.e., ΔF/Ftarget) is chosen for the loose specimen than the other two specimens due to difficulty in maintaining a constant Fr,s value. During the stepwise expansion, the SE stage is terminated once the mobilized reaction force is greater than the maximum total resistance force recorded since the initial penetration stage (C3 in Fig. 3) or once an EMS of 0.5 is reached (C4 in Fig. 3).
As shown in Fig. 5, after five steps of incremental loading in the SE stage, the top shaft in the dense specimen achieved an Fr,s of 1.51 kN (Fig. 5) and an expansion magnitude (\({\mathrm{EM}}_{s}\), defined in Eq. 2) of 0.16 (Fig. 5c). In the meantime, the penetration resistance force Qz (defined in Eq. 3) increased from nearly zero, which is measured at the end of self-weight equilibrium, to a value of 0.22 kN (Fig. 5a). At the end of the SE stage, the mobilized shaft reaction force (Fz, defined in Eq. 4) is 0.19 kN and the radial force on the bottom shaft (Fr,b) is 0.04 kN.
where Ds,expanded is the top shaft diameter during shaft expansion; the \({F}_{z,\mathrm{t}}, {F}_{z,\mathrm{b}}\) and \({F}_{z,\mathrm{m}}\) are the total vertical forces acting on the tip, the bottom shaft and middle shaft, respectively; the \({N}_{1}\), \({N}_{2}\) and \({N}_{3}\) are corresponding number of contacts on the three probe sections; the \({F}_{z,s}\) is the side friction force on the top shaft and \({F}_{z,u}\) is the end bearing force acting on the top shaft.
During the TPO stage, the bottom and middle shafts and conical tip are displaced downward at a velocity of 0.05 m/s. When applying a constant velocity, it is assumed that the necessary force required for this motion is able to be mobilized. In the TPO stage, this means that when enough radial and bearing forces on the top shaft are mobilized (see criterion C3), enough reaction force for penetrating motion can be generated which enables tip penetration with a constant velocity. Meanwhile, the top shaft continues to expand to maintain a constant Fr,s value. The TPO stage stops when the total penetration resistance force (Qz, Eq. 3) becomes greater than the maximum reaction force that can be mobilized (Fz,max, Eq. 5), the \({EM}_{s}\) reaches 0.5 or the penetration distance (\({\delta }_{z,t}\)) reaches 2Db (C3, C4 or C5 in Fig. 3).
where \({\mu }_{\mathrm{p}}\) is the probe-soil friction coefficient; \({F}_{z,u}\) is the end bearing force acting on the top shaft (Fig. 3).
Initial simulations indicated that self-burrowing without tip oscillations was unfeasible because the penetration resistance force was significantly greater than the anchorage forces provided at the top shaft. Therefore, the tip oscillation strategy inspired by polychaetes [18, 34] was employed to reduce the penetration resistance. Tip oscillation consisting of reciprocating lateral movements of the tip vertex with a period of 0.1 s, amplitude of 0.02 m, and velocity magnitude of 0.8 m/s are performed. Once the tip vertex velocity is assigned, the shape of the facets on the cone are automatically changed to accommodate the tip vertex displacements, as shown in the TPO stage of Fig. 3. The oscillation parameters are chosen from the DEM self-burrowing simulations by [50], where the effects of probe motion velocities and amplitudes are preliminarily investigated. These tip oscillation parameters were shown to be able to reduce the penetration resistance force to values that are smaller than the maximum reaction force (\({F}_{z,\mathrm{ max}}\)) and thus enable self-burrowing. This reduction is likely done by loosening particles around the tip. For example, the measured void ratio below the tip increases from 0.589 to 0.606 after tip oscillation.
In the dense specimen, the Qz value oscillates during the TPO stage with a maximum value of 0.51 kN and minimum values around 0 kN (Fig. 5a), which are always smaller than the calculated \({F}_{z, \mathrm{max}}\) value of 0.525 kN (note: \({F}_{z,u}\) is nearly zero). Comparison of these results with the penetration resistances measured during IP (Fig. 4a) indicates that the tip oscillation strategy can significantly reduce the penetration resistance and it prevents the remobilization of penetration forces with continued tip advancement observed by [5, 6]. At the end of TPO stage, the EMS reaches 0.52 resulting in termination of the TPO stage (Fig. 5c). At this stage, the tip had advanced 2.5 cm with 5 cycles of tip oscillation (Fig. 5b). It is noted that even though the mobilized shaft reaction force (Fz, Eq. 4) is smaller compared to the Qz values, the total reaction force (Fz,max, Eq. 5) that can be mobilized is calculated to be 0.69 kN, which is greater than Qz and thus tip advancement is considered feasible.
During the BE stage, the bottom shaft radially expands using the same force-controlled algorithm described for the SE stage (F in Fig. 3), while the top shaft now maintains a constant shape and location. The BE stage is terminated once the mobilized bottom shaft reaction force (Fz,b, Eq. 6) is greater than the penetration resistance, or the bottom shaft expansion magnitude (EMb, Eq. 7) reaches a limit of 0.5 (C6 or C7 in Fig. 3).
where the Db,expand is the diameter of the bottom shaft during expansion.
At the end of this stage, the bottom shaft mobilizes a Fr,b of 2.43 kN and achieves a corresponding EMb of 0.46 (Fig. 5) in the dense specimen. It is noted that the Fr,s on the top shaft decreases to 0.25 kN at the end of the BE stage due to arching formed between the top and bottom shaft causing relaxation of contact forces around the top shaft. This reduction has the similar mechanism with the tip resistance relaxation induced by shaft expansion during the SE stage observed by others (e.g., [5, 23]).
During the SC stage, the top shaft contracts with a radial velocity of 0.1 m/s until the diameter returns to its original value of 37.4 mm (D2 and C8 in Fig. 3). Then, during the SR stage the top shaft displaces downward at a velocity of 0.1 m/s (D3 in Fig. 3). This downward movement is stopped once the reaction force on the bottom shaft becomes smaller than the sum of the shaft retraction resistance force and the tip resistance force or the shaft retraction distance (\({\delta }_{z,s}\)) reaches the tip penetration distance mobilized in the TPO stage (C6 or C9 in Fig. 3). In the dense specimen, the mobilized bottom shaft reaction force (i.e., Fr,b) is large enough for the retraction stage to be completed since the retraction resistance force (i.e., Fz,s) mobilized by the top shaft is smaller than 0.1 kN throughout the SR stage (Fig. 5). Lastly, during the BC stage the tip is contracted with a radial velocity of 0.1 m/s it returns to its original diameter of 35.6 mm (D2 and C10 in Fig. 3). At this point, one cycle of self-burrowing is completed, the probe shape has returned to the original condition and the entire probe has achieved a downward displacement of \({\delta }_{z,t}\).
4 Multi-cycle self-burrowing process
In this section, the probe forces and displacements, particle contact forces, particle displacements and mechanical work done during multiple self-burrowing cycles in the dense, medium dense, and loose specimens are presented and compared.
4.1 Multiple self-burrowing cycles in the dense specimen
A 2nd and 3rd self-burrowing cycle were simulated on the dense specimen (Simulation #1) to evaluate the continued performance of the bio-inspired probe. The evolution of the probe forces and displacements are presented in Fig. 6. The evolution of the probe forces through the six self-burrowing stages follows similar trends as those in the 1st cycle. At the end of the SE stage in the 2nd and 3rd cycle, the top shaft expands to achieve the Fr,s about 1.60 kN with EMS values of 0.21 and 0.14, respectively (Fig. 6a), accompanied with a decrease in Qz. During the TPO stage in the 2nd and 3rd cycles, the Qz values oscillates with a maximum value of 0.59 kN and 0.63 kN, respectively. During the BE stage, the bottom shaft is expanded to achieve an Fr,b of 2.0 kN and 2.8 kN at the end of the 2nd and 3rd cycles, respectively (Fig. 6a). It is noted that, unlike the Qz and Fr,b, the Fr,s target values through the three cycles have similar magnitudes because the maximum total resistance force recorded is determined from the values recorded at the end of the IP stage.

Evolution of probe forces and displacements with simulation steps during the three cycles of self-burrowing process in the dense specimen (Simulation #1). a Penetration resistance force (Qz), vertical top shaft force (Fz), radial top shaft force (Fr,t), and radial bottom shaft force (Fr,s); b penetration displacements of the tip (δz,t) and the top shaft (δz,s); c expansion magnitude of the top (EMb) and the bottom shafts (EMs). Note that the simulation step was reset to zero after the initial penetration stage
The simulated probe achieves greater penetration displacements with increasing self-burrowing cycles. Specifically, the probe advances 2.5, 4.0, and 7.5 cm in the 1st, 2nd, and 3rd cycles, respectively. The TPO stage in the 1st and 2nd cycles are terminated due to EMS reaching the limit of 0.50 (Fig. 6c), whereas in the 3rd cycle the TPO stage is terminated due to the penetration displacement reaching the limit of 2Db (i.e., 7.5 cm). Additionally, the slope of the increase in EMS during the TPO stage is steepest in the 1st cycle and flattest in the 3rd cycle (Fig. 6c). These results indicate that maintaining a constant shaft reaction force during tip advancement is critical for self-burrowing in shallow depths, which is more challenging in the initial cycle.
Less bottom shaft expansion is required to provide enough anchorage for shaft retraction with increasing cycles. In the 2nd and 3rd cycles, the EMb are 0.08 and 0.19, both smaller than the EMb of 0.46 in the 1st cycle. The corresponding bottom shaft force (Fr,b) in the 2nd and 3rd cycles are 2.2 kN and 2.9 kN, respectively. The Fr,b values are also large enough for shaft retraction since the maximum shaft retraction force (Fz,s) are 0.15 and 0.3 kN in the 2nd and 3rd cycles, respectively.
4.2 Effects of density on the shaft expansion and tip penetration stages
The evolution of probe forces and displacements during self-burrowing in the medium dense and loose specimens are presented in Figs. 6, 7, 8 and 9. Note that only one cycle was simulated in the loose specimen due to the low self-burrowing performance. The effects of density on the 1st self-burrowing cycle are first discussed, followed by comparisons to the self-burrowing performance during the 2nd and 3rd cycle.

Evolution of probe forces and displacements with simulation steps during the three cycles of self-burrowing in the medium dense specimen (Simulation #2). a Penetration resistance force (Qz), vertical top shaft force (Fz), radial top shaft force (Fr,t), and radial bottom shaft force (Fr,s); b penetration displacements of the tip (δz,t) and the top shaft (δz,s); c expansion magnitude of the top (EMb) and the bottom shafts (EMs). Note that the simulation step was reset to zero after the initial penetration stage

Evolution of probe forces and displacements with simulation steps during the self-burrowing process in the loose specimen (Simulation #3). a Penetration resistance force (Qz), vertical top shaft force (Fz), radial top shaft force (Fr,t), and radial bottom shaft force (Fr,s); b penetration displacements of the tip (δz,t) and the top shaft (δz,s); c expansion magnitude of the top (EMb) and the bottom shafts (EMs). Note that the simulation step was reset to zero after the initial penetration stage

Evolution of probe forces and displacements with simulation steps during the three cycles of self-burrowing process in the loose specimen with an initial EMS in the TPO stage of 0.08 (Simulation #4). a Penetration resistance force (Qz), vertical top shaft force (Fz), radial top shaft force (Fr,t), and radial bottom shaft force (Fr,s); b penetration displacements of the tip (δz,t) and the top shaft (δz,s); c expansion magnitude of the top (EMb) and the bottom shafts (EMs). Note that the simulation step was reset to zero after the initial penetration stage
The probe in the medium dense specimen required the smallest expansion of the top shaft to mobilize the target radial force during the 1st cycle of self-burrowing, while it required the largest expansion of the top shaft to mobilize the target radial force in the loose specimen. In the medium dense specimen (Simulation #2, Fig. 7) the SE stage was terminated once a target Fr,s of 0.76 kN was mobilized corresponding to an EMS of 0.10, and in the loose specimen the SE stage was terminated once a target Fr,s of 0.49 kN was mobilized corresponding to an EMS of 0.35 (Simulation #3, Fig. 8). As previously discussed, the corresponding Fr,s and EMS values for the dense specimen simulation are 1.50 kN and 0.16, respectively (Fig. 5).
The results indicate that the probe’s self-burrowing ability in the 1st cycle is greater in the medium dense specimen, followed by the dense specimen, and the tip advancement was the smallest in the loose specimen. Namely, tip displacements of 2.5 cm (5 tip oscillation cycles), 3.5 cm (7 tip oscillation cycles) and 0.25 cm (0.5 tip oscillation cycles) were achieved in the dense, medium dense, and loose specimens, respectively (Figs. 6b, 7b, 8b). This trend is related to the ratio of the radial shaft force at the end of SE to the maximum resistance force at the end of IP (Fr,s/Qz,max), which are 0.68, 1.09, and 2.04 for the dense, medium dense, and loose specimens, respectively. This finding agrees with cavity expansion solutions presented in Martinez et al. [29] showing an increase of the ratio of cavity limit pressure to tip resistance (PL/qc) as the soil density decreases. Since all the simulations are terminated when the EMS reaches a value of 0.50, the self-burrowing distances are also related to the EMS magnitude at the end of the SE stage, which is largest in the loose specimen and smallest in the medium dense specimen.
The results in Fig. 8 indicate that self-burrowing ability in the loose specimen is lesser compared to that of the other two specimens despite the fact that the Fr,s/Qz,max value is the highest (2.04). This is likely due to the development of a punching failure of the soil around the top shaft owing to the high void ratio of the specimen which prevents maintaining a constant radial force during the TPO stage. This mechanism is investigated later in the meso-scale results section. Another reason is that a large EMS value at the end of the SE stage results in the EMS reaching the limit of 0.50 early in the TPO stage, causing its termination when the tip vertical displacement is small.
An additional simulation (#4) was performed on the loose specimen to explore the effect of the EMS on the self-burrowing performance, where the SE stage in the 1st self-burrowing cycle was terminated when the EMS reached a value of 0.08, with corresponded to an Fr,s of 0.35 kN, which corresponds to about 70% of the target Fr,s magnitude (Fig. 9). The small EMs of 0.08 at the beginning of TPO enables a tip advancement of 2.5 cm during 5 cycles of tip oscillation. Therefore, maintaining a small EMS at the end of the SE stage is necessary for allowing the shaft to be further expanded during TPO. These results indicate that further investigation on the effects of EMS during SE is required for optimization of the probe’s self-burrowing performance in soils of different densities. Considering the effects of EMS at the end of SE, the 2nd and 3rd self-burrowing cycle were performed in the loose specimen (Simulation #4) with a shaft expansion limit of 0.15 during the SE stage (Fig. 9).
The probe achieves a greater vertical tip displacement in the medium dense specimen than in the dense and loose specimens (Figs. 6b, 7b, 9b). Specifically, the probe advances 7.5 cm (i.e., limited by δz,t = 2Db) during the 2nd self-burrowing cycle in the medium dense specimen (Fig. 7b), which is greater than the corresponding tip displacements in both the dense and loose specimens of 4.0 cm. While the probe achieves the same tip displacement of 7.5 cm (i.e., limited by δz,t = 2Db) in the 3rd cycle in all the specimens, the medium dense specimen requires the smallest magnitude of EMS (i.e., 0.31) at the end of TPO while the loose specimen requires the largest EMS (i.e., 0.50). The consistent increase in penetration displacements with increasing self-burrowing cycles in all the simulated specimens suggest that the self-burrowing ability of the probe increases with depth for the set of parameters and conditions considered in this study.
4.3 Effects of density on the bottom shaft expansion, contraction, and retraction stages
At the end of the 1st BE stage, Fr,b of 1.25 kN and 0.45 kN are mobilized in the medium dense (Simulation #2) and loose specimens (Simulation #4), respectively. In both specimens, the Fr,b values are large enough compared to the mobilized vertical shaft force (Fz,s) values, thus enable the top shaft to complete contraction in the SC stage and complete retraction in the SR stage. The corresponding EMb values at the end of the 1st BE stage reach 0.5 (i.e., expansion limit) in all the three specimens (Figs. 6c, 7c, 9c), which indicate that achieving anchorage forces on the bottom shaft is also challenging in the initial cycle.
As the probe advances to greater depths, greater bottom shaft expansion magnitude is needed for retracting the top shaft in the loose and medium dense specimens than in the dense specimen. Specifically, an EMb of 0.5 is needed in loose specimen for all three cycles (Fig. 9c) and the EMb of 0.5 and 0.45 are needed in the medium dense specimen during the 2nd and 3rd cycles (Fig. 7c), whereas the EMb values are small in dense specimen during the 2nd and 3rd cycles (0.08 and 0.19, respectively, Fig. 6c).
4.4 Evolution of contact forces and particle displacements during self-burrowing
The contact force chain maps and particle displacement fields during the 1st self-burrowing cycle are recorded for the dense, medium dense and loose specimens (Simulations #1, #2, and #4, Figs. 10, 11, 12, 13). These are generated along x–z cross-sections of the specimens.

Contact force chains at the end of the SE, TPO and BE stages during the first self-burrowing cycle in the dense (Simulation #1), medium dense (Simulation #2), and loose specimens (Simulation #4)

Contact force chains at the end of the SC, SR and BC stages during the first self-burrowing cycle in the dense (Simulation #1), medium dense (Simulation #2), and loose specimens (Simulation #4)

Particle vertical (left haft) and horizontal (right half) displacements at the end of the SE, TPO and BE stages during the first self-burrowing cycle in the dense (Simulation #1), medium dense (Simulation #2) and loose specimens (Simulation #4). Note that the displacements are recorded from the beginning of the SE stage (i.e., the displacements during initial penetration are not included)

Particle vertical (left haft) and horizontal (right half) displacements at the end of the SC, SR and BC stages during the first self-burrowing cycle in the dense (Simulation #1), medium dense (Simulation #2) and loose specimens (Simulation #4). Note that the displacements are recorded from the beginning of the SE stage (i.e., the displacements during initial penetration are not included)
The distribution and evolution of contact forces around the shaft and tip in the three specimens are similar to one another, but the magnitudes decrease with soil density (Figs. 10, 11). In general, large contact force magnitudes concentrate around the probe sections that are either displaced or expanded. For example, contact forces concentrate around the top shaft, tip, and bottom shaft at the end of the SE, TPO, and BE stages, respectively (Fig. 10). In contrast, the contact forces reduce around the probe sections that are contracted, as observed around the top shaft at the end of the SC and around the bottom shaft at the end of BC (Fig. 11). Also, the contact forces around the middle and bottom shafts have small magnitudes during the TPO stage due to the continued expansion of the top shaft and advancement of the tip that lead to arching, as described by [6].
Particle displacement fields show the different failure mechanism in the specimens with varying density (Figs. 12, 13), where the left half of each figure presents the particle vertical displacements and the right half presents the horizontal displacements. In these figures, the color of each particle is proportional to its displacement. It is noted that the scale used ranges from − 4 to 4 mm to characterize the shape of zone with significant deformations. Therefore, the displacements with magnitudes greater than 4 mm share the darkest colors; the maximum displacement in the figure is of about 10 mm, occurring close to the shafts and tip. In these figures, the displacement is zeroed after the IP stage to emphasize the incremental displacements resulting from the SE, TPO, BE, SC, SR, and BC stages.
During the SE stage, particles are mainly displaced horizontally away from the top shaft due to expansion of the shaft (Fig. 12). The larger influenced zone takes place in the dense specimen is a result of the greatest expansion magnitude among the specimens (i.e., EMs = 0.16). In the dense specimen, particles around the top shaft are also displaced upward during SE, whereas the vertical displacements in the medium dense and loose specimens are nearly zero.
At the end of the TPO stage (Fig. 12), the large upward and horizontal displacements around the expanded shaft in the dense specimen propagate to the soil surface and form a pronounced shallow conical failure zone. The particles near the top of the boundary wall have an absolute average displacement about 1 mm, which is less than 10% of the average displacements around the top shaft (10 mm). While this may indicate an effect due to the presence of the boundary, this is believed to have a small influence on the simulation result. In contrast, the upward displacements around the expanded shaft at the end of the TPO stage in the loose specimen have small magnitudes while the horizontal displacements have large magnitudes and form a cylindrical zone of limited size around the anchor. This indicates a localized punching failure mechanism which limits the probe’s self-burrowing ability as previously described. This distribution of particle displacements in the medium dense specimen also show the development of a shallow conical failure wedge, but with smaller size in comparison with that generated in the dense specimen.
Large downward displacements concentrate below the top shaft due to continued shaft expansion and tip penetration in the medium and loose specimens, whereas this concentration is less obvious in the dense specimen. The downward and horizontal displacements are also large below the tip due to the penetrating and oscillating tip movements. At the end of the BE stage, the bottom shaft expansion produces an expansion the failure zone around the bottom shaft and tip, as indicated by the large horizontal displacements.
At the end of SC, particles around the top shaft are displaced inward, which result in downward and leftward displacements close to the shaft, forming an active failure zone shown in blue in Fig. 13. Modest changes in particle displacements occur during the SR and BC stages. It is noted that, at the end of the BC stage, more displacements toward the top shaft (colored by green) are observed in the medium dense specimen, indicating soil densification which is likely beneficial for the top shaft expansion in the next self-burrowing cycle. This observation is in agreement with the smallest EMs (i.e., 0.45) in the medium dense specimen measured in the 2nd cycle and as well as the greater self-burrowing distance in the medium dense specimen.
4.5 Mechanical work done during multi-cycle self-burrowing
The total mechanical work (W) done by the probe during the self-burrowing process is composed of the work resulting from seven different probe motions: top shaft expansion (WSE, Eq. 8), tip penetration (WTP, Eq. 9), tip oscillation (WTO, Eq. 10), bottom shaft expansion (WBE, Eq. 11), top shaft contraction (WSC, Eq. 8), shaft retraction (WSR, Eq. 12), and bottom shaft contraction (WBC, Eq. 11).
where the \({v}_{r,s}\) is the radial velocity of the top shaft, \({v}_{z,t}\) is the total penetration resistance force and the vertical velocity of the tip, \({F}_{r,t}\mathrm{ and}\frac{{v}_{r,t}}{2}\) are the radial force and the average radial velocity of the tip,\({v}_{r,b}\) is the radial force and the radial velocity of the bottom shaft, \(\Delta {t}_{i}\) is the timestep of the \({i\mathrm{th}}\) simulation step and \({i}_{\mathrm{max}}\) is the maximum simulation step.
Self-burrowing in denser soils requires a greater amount of total work. The time series of mechanical work done during each stage of three cycles of self-burrowing in specimens of varying density are presented in Fig. 14 (i.e., excluding the initial penetration stage). The total work is 416.3 J for the dense specimen, 145.6 J for the medium dense, and 53.9 J for the loose specimen. The results for the self-burrowing cycles indicate that most of the work is done during tip oscillation, which accounts for 322.2 J, 90.9 J, 29.1 J in the dense, medium dense and loose specimens, respectively, totaling 77.4%, 62.4%, 54.0% of the total self-burrowing work (Fig. 14b–d). The work for tip penetration is small relative to tip oscillation, which only accounts for 5.2%, 4.2% and 4.5% of the total in the dense, medium dense and loose specimens. Expansion of the top and bottom shafts also require a significant amount of work, accounting for 34.2 J (8.2% of the total) and 22.0 J (5.3%) for the dense specimen, 15.2 J (10.4%) and 28.6 J (19.6%) for the medium dense specimen, and 9.4 J (17.4%) and 11.0 J (20.4%) for the loose specimen. The work done by shaft contraction, shaft retraction, and bottom shaft contraction is small in magnitude.

Mechanical work done during multi-cycle self-burrowing simulations. a Total mechanical work and percentage of total work done by the individual components in the b dense, c medium dense, and d loose specimens. Note that the simulation step was reset to zero after the initial penetration stage
This analysis on the energy required for self-burrowing indicates that the efficiency of penetration, quantified in terms of cm of penetration per J, decreases with increasing density. Figure 15a shows the total work done in the three self-burrowing cycles. In the first cycle, the total work is 81.3 J, 34.9 J and 10.1 J for the dense, medium dense and loose specimens, respectively, which correspond to 2.4, 3.5, and 2.5 cm self-burrowing distances. These values yield efficiencies of 0.03, 0.10, and 0.25 cm/J for the dense, medium dense, and loose specimens, respectively (Fig. 15b). The work done consistently increase with self-burrowing cycles for the dense, medium dense and loose specimens due to the increase in self-burrowing distance. However, no distinct trend emerges between the cycle number and efficiency, with the 2nd cycle yielding the largest efficiency for the three specimens.

Total mechanical work done per self-burrowing cycle and efficiency, defined as the ration of the penetration displacement and the total work done, for the dense, medium dense, and loose specimens
5 Conclusions and future work
This study presents the results of a DEM investigation on the self-burrowing process of a bio-inspired probe in shallow coarse-grained soils of varying densities. Simulations consisting of three self-burrowing cycles are performed in dense, medium dense, and loose specimens. The simulated self-burrowing process consists of alternative expansion and contraction of two shafts that enable downward displacement of the probe, mimicking the dual-anchor mechanism employed by razor clams. The probe motions are force-controlled for the two shaft expansion stages and are displacement-controlled during the rest of the stages. Horizontal oscillations of the probe tip are employed to reduce the penetration resistance.
The self-burrowing simulations in three specimens with varying densities show that continued top shaft expansion and tip oscillation are both necessary during the penetration stage to enable self-burrowing. The former motion helps maintaining the required reaction force and the latter one helps reduce the penetration resistance force by 25–76% in the three specimens compared to that mobilized during initial penetration.
Self-burrowing is shown to be most challenging in the loose specimen. While the loose specimen can mobilize the greatest anchor to penetration force ratio; the large void ratio leads to a punching failure around the top anchor and created difficulties in maintaining a constant radial shaft force. This type of punching failure may not be observed at greater depths, which may improve the self-burrowing ability of the probe in loose specimens. Additionally, it was shown that selecting a small initial top shaft expansion magnitude can help improving the self-burrowing performance at shallow depths.
For all simulated densities, the self-burrowing displacement increased with continued cycles due to the reduction in top shaft expansion magnitude needed to provide enough reaction force for probe penetration. Likewise, a smaller bottom shaft expansion is required to retract the top shaft as the self-burrowing cycles increase.
The total mechanical work done is greatest in the dense specimen, while the energy efficiency of self-burrowing, quantified by means of the penetration distance per unit work, is highest in the loose specimen. While tip oscillation enables self-burrowing, it requires the largest proportion of the total work among all the self-burrowing stages, and the expansion of the top and bottom shafts also require significant amount of work. The proportion of these quantities depends on the specimen density, where the dense specimen resulted in a greater proportion of the total work done during tip oscillation while the loose specimen resulted in a greater proportion of total work done during top shaft expansion.
The results presented here can help in the design and construction of self-burrowing probe prototypes. Namely, they can be used to determine the termination criteria and how these depend on soil density (e.g., smaller EM limit during shaft expansion in loose soil), they indicate that a strategy like tip oscillation is required for reducing the penetration resistance, and help estimate the work and power required for the different self-burrowing stages.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- \({a}_{\mathrm{r}}\) :
-
Radial acceleration of the top shaft
- \({D}_{\mathrm{b}}\) :
-
Diameter of the bottom shaft before expansion
- \({D}_{\mathrm{b},\mathrm{expanded}}\) :
-
Diameter of the bottom shaft after expansion
- \({D}_{s}\) :
-
Diameter of the top shaft before expansion
- \({D}_{\mathrm{s},\mathrm{expanded}}\) :
-
Diameter of the top shaft before expansion
- \({\delta }_{z,\mathrm{s}}\) :
-
Vertical displacement of the top shaft
- \({\delta }_{z,\mathrm{t}}\) :
-
Vertical displacement of the tip
- e :
-
Void ratio
- \({\mathrm{EM}}_{\mathrm{b}}\) :
-
Expansion magnitude of the bottom shaft
- \({\mathrm{EM}}_{s}\) :
-
Expansion magnitude of the top shaft
- ΔF :
-
Load increment of force-controlled loading
- F target :
-
Target force of force-controlled loading
- \({F}_{r,s}\) :
-
Radial force acting on the top shaft
- \({F}_{r,\mathrm{b}}\) :
-
Radial force acting on the bottom shaft
- \({F}_{z,\mathrm{b}}\) :
-
Vertical force acting on the bottom shaft
- \({F}_{z,\mathrm{m}}\) :
-
Vertical force acting on the middle shaft
- \({F}_{z,s}\) :
-
Vertical force acting on the top shaft
- \({F}_{z,u}\) :
-
Bearing force on the top shaft
- \({F}_{z,\mathrm{t}}\) :
-
Vertical force acting on the conical tip
- \({F}_{z}\) :
-
Total reaction force
- G :
-
Particle and chamber wall shear modulus
- G p :
-
Probe shear modulus
- \(\mu\) :
-
Particle friction coefficient
- \({\mu }_{\mathrm{p}}\) :
-
Probe friction coefficient
- \(\mu^{\prime}\) :
-
Chamber wall friction coefficient
- \(N\), \({N}_{1}\), \({N}_{2}\), \({N}_{3}\) :
-
Number of contact forces on the probe sections
- \({Q}_{z}\) :
-
Total resistance force
- \(\rho\) :
-
Particle density
- \({\rho }_{\mathrm{p}}\) :
-
Probe density
- \(\upsilon\) :
-
Particle and chamber wall Poisson’s ratio
- \({\upsilon }_{\mathrm{p}}\) :
-
Probe Poisson’s ratio
- \({W}_{\mathrm{all}}\) :
-
Weight of the entire probe
- W :
-
Total mechanical work
- W SC :
-
Work done by top shaft contraction
- W SE :
-
Work done by top shaft expansion
- W SR :
-
Work done by top shaft retraction
- W BC :
-
Work done by bottom shaft contraction
- W BE :
-
Work done by bottom shaft expansion
- W TO :
-
Work done by tip oscillation
- W TP :
-
Work done by tip penetration
- \({v}_{r,\mathrm{b}}\) :
-
Radial expanding velocity of the bottom shaft
- \({v}_{r,\mathrm{t}}\) :
-
Horizontal oscillating velocity of the tip vertex
- \({v}_{z,\mathrm{all}}\) :
-
Vertical velocity of the entire probe
- \({v}_{z,s}\) :
-
Vertical velocity of the top shaft
- \({v}_{z}\) :
-
Vertical velocity of the tip, bottom shaft, and middle shaft
References
Arroyo M, Butlanska J, Gens A, Calvetti F, Jamiolkowski M (2011) Cone penetration tests in a virtual calibration chamber. Géotechnique 61(6):525–531
Butlanska J, Arroyo M, Gens A, O’Sullivan C (2014) Multi-scale analysis of cone penetration test (CPT) in a virtual calibration chamber. Can Geotech J 51(1):51–66
Cerfontaine B, Brown MJ, Ciantia M, Huisman M, Ottolini M (2021) Discrete element modelling of silent piling group installation for offshore wind turbine foundations. In: Proceedings of the second international conference on press-in engineering 2021, Kochi, Japan. CRC Press, pp 279–288
Chen Y, Khosravi A, Martinez A, DeJong J, Wilson D (2020) Analysis of the self-penetration process of a bio-inspired in situ testing probe. In: Geo-congress 2020: biogeotechnics. American Society of Civil Engineers, Reston, pp 224–232
Chen Y, Khosravi A, Martinez A, DeJong J (2021) Modeling the self-penetration process of a bio-inspired probe in granular soils. Bioinspir Biomim 16(4):046012
Chen Y, Martinez A, DeJong J (2022) DEM study of the alteration of the stress state in granular media around a bio-inspired probe. Can Geotech J 59(10):1691–1711
Chen Y, Martinez A, DeJong J (2022) DEM simulations of a bio-inspired site characterization probe with two anchors. Acta Geotech. https://doi.org/10.1007/s11440-022-01684-5
Chen Y (2022) Discrete element modeling of bio-inspired soil penetration processes for in-situ testing probes. Doctoral dissertation, UC Davis.
Ciantia MO, Arroyo M, Butlanska J, Gens A (2016) DEM modelling of cone penetration tests in a double-porosity crushable granular material. Comput Geotech 73:109–127
Ciantia MO, Boschi K, Shire T, Emam S (2018) Numerical techniques for fast generation of large discrete-element models. Proc Inst Civ Eng Eng Comput Mech 171(4):147–161
Ciantia M, O’Sullivan C, Jardine RJ (2019) Pile penetration in crushable soils: insights from micromechanical modelling. In: 17th European conference on soil mechanics and geotechnical engineering (ECSMGE 2019). International Society for Soil Mechanics and Geotechnical Engineering
Ciantia MO, Arroyo M, O’Sullivan C, Gens A, Liu T (2019) Grading evolution and critical state in a discrete numerical model of Fontainebleau sand. Géotechnique 69(1):1–15
Ciantia MO, O’Sullivan C (2020) Calculating the state parameter in crushable sands. Int J Geomech 20(7):04020095
Combe G, Roux JN (2009) Discrete numerical simulation, quasistatic deformation and the origins of strain in granular materials. arXiv preprint arXiv:0901.3842.
Cortes DD, John S (2018) Earthworm-inspired soil penetration. In: Proceedings of biomediated and bioinspired geotechnics (B2G) conference
DeJong JT, Soga K, Kavazanjian E, Burns S, Van Paassen LA, Al Qabany A, Aydilek A, Bang SS, Burbank M, Caslake LF, Chen CY (2014) Biogeochemical processes and geotechnical applications: progress, opportunities and challenges. In: Bio-and chemo-mechanical processes in geotechnical engineering: géotechnique symposium in print 2013. Ice Publishing, pp 143–157
Dorgan KM (2015) The biomechanics of burrowing and boring. J Exp Biol 218(2):176–183
Dorgan KM (2018) Kinematics of burrowing by peristalsis in granular sands. J Exp Biol 221(10):jeb167759
Elder HY (1980) Peristaltic mechanisms. Asp Anim Mov 5:71–92
Escobar E, Navarrete MB, Gourvès R, Haddani Y, Breul P, Chevalier B (2016) Dynamic characterization of the supporting layers in railway tracks using the dynamic penetrometer Panda 3®. Procedia Eng 143:1024–1033
Falagush O, McDowell GR, Yu HS (2015) Discrete element modeling of cone penetration tests incorporating particle shape and crushing. Int J Geomech 15(6):04015003
Gans C (1973) Locomotion and burrowing in limbless vertebrates. Nature 242:414–415
Huang S, Tao J (2020) Modeling clam-inspired burrowing in dry sand using cavity expansion theory and DEM. Acta Geotech 15(8):2305–2326
Huang S, Tang Y, Bagheri H, Li D, Ardente A, Aukes D, Marvi H, Tao J (2020) Effects of friction anisotropy on upward burrowing behavior of soft robots in granular materials. Adv Intell Syst 2(6):1900183
Itasca CGI (2017) PFC—Particle Flow Code, Ver. 5.0. Minneapolis
Khosravi A, Martinez A, DeJong JT, Wilson D (2018) Discrete element simulations of bio-inspired self-burrowing probes in sands of varying density. In: Proceedings of biomediated and bioinspired geotechnics conference
Khosravi A, Martinez A, DeJong JT (2020) Discrete element model (DEM) simulations of cone penetration test (CPT) measurements and soil classification. Can Geotech J 57(9):1369–1387
Langton DD (1999) The Panda lightweight penetrometer for soil investigation and monitoring material compaction. Ground Eng 32:33–37
Martinez A, DeJong JT, Jaeger RA, Khosravi A (2020) Evaluation of self-penetration potential of a bio-inspired site characterization probe by cavity expansion analysis. Can Geotech J 57(5):706–716
Martinez A, Dejong J, Akin I, Aleali A, Arson C, Atkinson J, Bandini P, Baser T, Borela R, Boulanger R, Burrall M (2022) Bio-inspired geotechnical engineering: principles, current work, opportunities and challenges. Géotechnique 72(8):687–705
Mayne PW (2007) Cone penetration testing, vol 368. Transportation Research Board
McDowell GR, Falagush O, Yu HS (2012) A particle refinement method for simulating DEM of cone penetration testing in granular materials. Géotech Lett 2(3):141–147
Naclerio ND, Karsai A, Murray-Cooper M, Ozkan-Aydin Y, Aydin E, Goldman DI, Hawkes EW (2021) Controlling subterranean forces enables a fast, steerable, burrowing soft robot. Sci Robot 6(55):eabe2922
Ortiz D, Gravish N, Tolley MT (2019) Soft robot actuation strategies for locomotion in granular substrates. IEEE Robot Autom Lett 4(3):2630–2636
O’Sullivan C (2011) Particulate discrete element modelling: a geomechanics perspective. CRC Press
Purdy C, Raymond AJ, DeJong JT, Kendall A (2020) Life cycle assessment of site characterization methods. In: Geo-Congress 2020: geo-systems, sustainability, geoenvironmental engineering, and unsaturated soil mechanics. American Society of Civil Engineers, Reston, pp. 80-89.
Radjai F, Richefeu V (2009) Contact dynamics as a nonsmooth discrete element method. Mech Mater 41(6):715–728
Raymond AJ, Tipton JR, Kendall A, DeJong JT (2020) Review of impact categories and environmental indicators for life cycle assessment of geotechnical systems. J Ind Ecol 24(3):485–499
Sharif Y, Ciantia M, Brown MJ, Knappett JA, Ball JD (2019) Numerical techniques for the fast generation of samples using the particle refinement method. In: Proceedings of proceedings of the 8th international conference on discrete element methods
Tao JJ, Huang S, Tang Y (2020) SBOR: a minimalistic soft self-burrowing-out robot inspired by razor clams. Bioinspir Biomim 15(5):055003
Tao J (2021) Burrowing soft robots break new ground. Sci Robot 6(55):eabj3615
Tran QA, Navarrete MAB, Breul P, Chevalier B, Moustan P (2019) Soil dynamic stiffness and wave velocity measurement through dynamic cone penetrometer and wave analysis. In: XVI Congreso Panamericano de Mecánica de Suelos e Ingeniería Geotécnica, pp 401–408
Trueman ER (1968) The burrowing activities of bivalves. Synp Zool Soc Lond 22:167–186
Trueman ER (1968) A comparative account of the burrowing process of species of Mactra and of other bivalves. J Molluscan Stud 38(2):139–151
Trueman ER (1968) The locomotion of the freshwater clam Margaritifera margaritifera (Unionacea: Margaritanidae). Malacologia 6:401–410
Winter AG, Deits RLH, Dorsch DS, Slocum AH, Hosoi AE (2014) Razor clam to RoboClam: burrowing drag reduction mechanisms and their robotic adaptation. Bioinspir Biomim 9(3):036009
Zeng Z, Chen Y (2016) Simulation of soil-micropenetrometer interaction using the discrete element method (DEM). Trans ASABE 59(5):1157–1163
Zhang N, Arroyo M, Ciantia MO, Gens A, Butlanska J (2019) Standard penetration testing in a virtual calibration chamber. Comput Geotech 111:277–289
Zhang N, Ciantia MO, Arroyo M, Gens A (2021) A contact model for rough crushable sand. Soils Found 61(3):798–814
Zhang N, Arroyo M, Ciantia MO, Gens A (2021) Energy balance analyses during Standard Penetration Tests in a virtual calibration chamber. Comput Geotech 133:104040
Zhang N, Chen Y, Martinez A, Fuentes R (2023) A bio-inspired self-burrowing probe in shallow granular materials. J Geotech Geoenviron Eng 149(9):04023073
Zhong Y, Huang S, Tao JJ (2023) Minimalistic horizontal burrowing robots. J Geotech Geoenviron Eng 149(4):02823001
Acknowledgements
This material is based upon work supported in part by the Engineering Research Center Program of the National Science Foundation under NSF Cooperative Agreement No. EEC–1449501. The first and fourth authors were supported by the National Science Foundation (NSF) under Award No. 1942369. The second author thanks the financial support of the Theodore von Kármán Fellowship—outgoings 2023 (GSO082) from RWTH Aachen University for promoting collaborations between the authors. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect those of the National Science Foundation.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Chen, Y., Zhang, N., Fuentes, R. et al. A numerical study on the multi-cycle self-burrowing of a dual-anchor probe in shallow coarse-grained soils of varying density. Acta Geotech. 19, 1231–1250 (2024). https://doi.org/10.1007/s11440-023-02088-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11440-023-02088-9