
Abstract
The measures required for driving a tunnel below the groundwater table depend on the permeability of the soil. In coarse-grained, highly permeable soils additional measures, for example compressed-air support combined with a reduction of the permeability of the soil, e.g. induced by grouting, are necessary. Compared to this, it is possible to do without such measures in fine-grained, cohesive soils because of the increased short-term stability of the tunnel face under undrained conditions. In this publication the results of 3-dimensional finite-element calculations are presented to show the influence of the permeability of the soil and also the rate of the tunnel driving on the deformations around the tunnel as well as on the ground surface. The calculated deformations can furthermore be considered as an indicator for the time dependent stability of the tunnel face due to a higher redistribution of stresses and by that an enlargement of the plasticized zone. Usually the stability of the tunnel face is reduced by the presence of water because of the flow of water towards the tunnel. In low permeable soils undrained conditions prevail immediately after an excavation step. In this case relatively high stability-ratios may occur. The stability of the tunnel face will be reduced with increasing time until reaching the lower boundary of possible values, possibly leading to failure. If calculations are done under the assumption of drained conditions, the real stability of the tunnel face during construction may substantially exceed that of the calculated one. On the other hand, if calculations are done for undrained conditions, the effective stability may lie on the unsafe side [10]. There is therefore a big demand to optimize the method of investigating deformations around the tunnel, so as to ensure a safe tunnel excavation on the one hand and to guarantee a cost-effective process on the other. In this paper the tunnelling process is modelled by a step-by-step excavation under atmospheric conditions. The soil is described by a material model which distinguishes between primary and unload-reload stress paths and also accounts for stress-dependent stiffness parameters. The failure criterion is described by the Mohr-Coulomb criterion that considers cohesion, friction angle and angle of dilatancy.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Even when going by the very well known proverb of tunnel builders “speed is safety”, practical experience demonstrates that safe tunnelling is closely linked to the rate of tunnelling. This proverb holds especially true for fine-grained soils where as a function of time, a sufficient stability is given for the medium-term when undrained or partially drained conditions prevail. So it is quite possible to drive a tunnel in fine-grained, cohesive soils below the groundwater table under atmospheric conditions if the tunnelling process is not excessively interrupted. Another example for utilisation of partially drained conditions may be the situation when tools of the cutter head of a slurry shield have to be exchanged. In this case the slurry in the excavation chamber is emptied and an air pressure is applied instead. By utilisation of partially drained conditions the air pressure can be left on a minimum so that it is possible to keep down costs for entering the working chamber. The permeability of the soil and its influence on the tunnel face stability resulting in the development of deformations and settlements are based on finite-element-analyses, examined in the following. The analyses shown herein are merely the first computed results to describe the essential relationship between time dependent effects and the tunnel face stability as well as the deformations and settlements.
2 Basic concept
The influence of the permeability on the tunnel face stability is described on the basis of a flow net. A tunnelling process in homogeneous subsoil under atmospheric conditions is considered. Before tunnelling all water particles have the same hydraulic head independent of their position.
Because of the small permeability of soft soils, the velocity head can be neglected. A difference in the hydraulic head occurs during tunnel driving which leads to a towards the tunnel face directed groundwater flow. Figure 1 illustrates a possible simplified flow net.

Flow net in front of the tunnel face including the hydraulic gradient i
The flow net presented in Fig. 1 is independent of the permeability of the subsoil, whereby the hydraulic gradient i increases towards the tunnel face since the potential lines are bundled in this area. Because of the towards the tunnel face directed groundwater flow and the increasing hydraulic gradient, seepage forces f S are present in each element of the flow net. These seepage forces f S increase towards the tunnel face, reducing the stability of the tunnel face.
The relaxation and the deformations at the tunnel face result in a reduction of the pore water pressures ahead the tunnel face. Due to the low permeable soils only sparse water flows towards the tunnel. The pore pressures in front of the tunnel face as well as the seepage forces are reduced, because of the decreasing potential gradient (see Fig. 2).

Reduction of seepage forces by deformations
Thus the tunnel face stability increases in comparison to the undeformed tunnel face.
In the long-term, a reduced flow towards the tunnel induces increasing deformations and can sooner or later—depending on the stress-strain behaviour of the soil—cause a loss of stability at the tunnel face. With a continuing progress of tunnel driving as well as the previously mentioned conditions only apply in the short term, the tunnel face stability is higher than the long term stability as a result of the low permeability. In the following it is investigated under which conditions the previously described effects are relevant.
3 Finite element analyses
3.1 Model
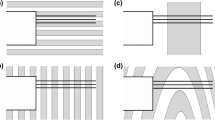
For the determination of permeability-dependent deformations and tunnel face stability 4-dimensional (i.e. 3-dimensional computation model with consideration of time) finite-element computations were conducted by means of the finite-element-code Plaxis 3D Tunnel. For the sake of convenience a circular tunnel with a diameter D = 6 m is assumed. An oval shape of the tunnel cross section would lead to comparable results. The tunnel is driven under atmospheric conditions with a shortly preceding top heading using the step-by-step method. The top heading is firstly driven in two successive drifts, each excavation stage being followed by an immediate shotcrete lining. The excavation of the bench follows with a total length of the two top heading excavations within one calculation phase. After excavating the bench it is lined immediately with shotcrete. It is assumed that the two top heading excavation phases take the same time as the excavation of the bench. Each excavation cycle takes a half day and thus the rate of advance amounts 6 m/day. The consolidation is determined by the duration of the excavation cycles, the deformation-induced pore pressure distribution and the hydrostatic pore pressure. The stresses are divided into effective stresses σs and fluid pressures σf according to the principle of Terzaghi.
Biot’s theory of coupled consolidation is assumed, [4] whereby the stresses of the soil and the fluid are determined by the following equations.
G is the shear modulus and K the bulk modulus of the soil, whereas the parameters Q and R characterise the coupling between the soil (s) and the fluid (f).
K s is the compression modulus of the solid grains and K f is the compression modulus of the fluid. The porosity ϕ is defined by the following equation.
Regarding the strains, it is also distinguished between the soil (εs) and the fluid (εf). The specific fluid flux q in the directions x, y, and z is analysed according to Darcy’s law.
The specific flux follows from the permeability k and the gradient of the hydraulic head.
The advance of the top heading and the bench is affected by the deactivation of the volume elements within the tunnel cross section. At the same time the pore pressures in the deactivated elements are set to zero.
The dimensions of the model were determined in such a way so as to minimise the influence of the boundary conditions on the calculation. The lateral boundary nodes of the finite element mesh are defined as fixed in the horizontal direction and moveable in the vertical direction. The nodes of the lower edge of the model are defined as fixed in both directions. Shell elements were applied for the simulation of the tunnel lining. The mesh size in longitudinal direction was chosen according to the excavation length of D/4 (= 1.5 m). In Fig. 3 the model used is presented, consisting of altogether 28,552 elements with 77,380 nodes and 171,312 stress points.

3-dimensional finite element model
In the range of the rear boundary of the model the mesh is more coarsely discretised over a length of 2D. Within this range tunnel driving is not modelled, but the soil elements within the tunnel cross section as well as the pore pressures are deactivated concurrent to the tunnel lining being activated. Within this range the results are already increasingly influenced by the boundary conditions. According to the procedure described above 20 excavation cycles with a total length of 10D are modelled. For the investigation of the development of the determining parameters under successive tunnelling—in particular the deformations—these are regarded in longitudinal direction in the middle of the model with a distance of 6D from the front and rear boundary (monitoring section “MS”, see Fig. 3), according to this the results are analysed after the 12th excavation cycle. According to the abovementioned dimensions of the model and the type of modelling, it is verified that in the monitoring section at a distance of 6D behind the front boundary, the boundary conditions do not exhibit any relevant influence. The above stated dimensions of the model are consistent with other data from several authors (see [8]). The calculated deformations are considered to be small so that the formulation is referred to the original undeformed geometry without performing an updated mesh analysis [5].
3.2 Soil and material parameters
Homogeneous subsoil conditions are taken as the basis for the calculations shown below. The material model used for the calculation differentiates between primary loading and unloading and/or reloading, whereby the stiffness of the soil depends on the present stress level according to the exponential correlation proposed by Ohde [11]. The stresses used in the following are defined as the effective stresses of the soil. For the sake of convenience the superscript s is omitted.
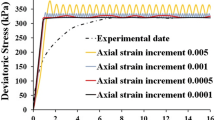
The shear strength is defined by the parameters cohesion c, friction angle φ and angle of dilatancy ψ. The model accounts a hyperbolic relationship between the axial strain and the deviatoric stress as described by Duncan and Chang [7]. The two yield functions f 12 and f 13 are defined for the triaxial case.
q a is defined as the ratio between the ultimate deviatoric stress q f and the failure ratio R f which is usually set to approximately 0.9.
The plastic shear strain γp is the main parameter for the frictional hardening.
A non-associated flow rule is used for the shear hardening. The flow rule has a linear form, the rate of the plastic volumetric strain depends on the mobilised dilatancy angle and the rate of the plastic shear strain.
The cap yield surface is defined as follows:
The parameter α is a cap parameter, which depends on the lateral earth pressure for normally consolidated behaviour. The pre-consolidation stress is given by the parameter p p . The other parameters are defined according to the following equations.
An associated flow rule is assumed for cap hardening. The hardening law relates the pre-consolidation stress to the volumetric cap strain ε pc v .
The volumetric cap strain is the plastic volumetric strain in isotropic compression, in which the parameter β is an auxiliary cap parameter too, which depends on the primary stiffness for compressive loading [13]. The other parameters appearing in the equation above are explained in Table 1.
The lateral earth pressure factor is determined according to Jaky’s relation for normally consolidated behaviour. The permeability is equal in both the horizontal and vertical direction and is varied in the context of the investigation. The influence of the permeability on the deformations and the stability of the tunnel face was investigated on the basis of a permeability of k = 1 × 10−8 m/s. This value was increased by a factor of 2 and 10 as well as reduced by a factor of 10. The tunnelling rate is not varied in the context of this research, since an increase of the permeability affects the computed results in the same way as a corresponding reduction of the tunnelling rate and vice versa.
The soil parameters for the clay as well as the parameters for the linear elastic tunnel lining are presented in Tables 1 and 2.
For the computation of the pore pressures a so called “cavitation cut off” is defined. This parameter limits the negative pore pressure (in the sense of a tensile stress) at values of 50 and 100 kN/m², respectively.
The Young’s modulus of the tunnel lining was set comparatively high. This was done without consideration of time effects in respect of the concrete, neither the hardening process of the fresh shotcrete nor creeping of the installed tunnel lining as presented e.g. in Hellmich et al. [9].
4 Results
4.1 Horizontal deformation of the tunnel face
In Fig. 4 the horizontal deformation of the tunnel face (see point A in Fig. 4) is represented against the permeability at the monitoring section (MS), after the 12th excavation step.

Horizontal deformation of Point A due to different permeability
As shown in Fig. 4, a nonlinear relationship exists between the permeability k and the computed horizontal deformations of the tunnel face. Starting from the basis of a permeability of k = 1 × 10−8 m/s an increase of the permeability leads to a considerable increase of the horizontal deformations of point A. The deformations at the tunnel face as well as of the tunnel profile have a direct influence on the area enclosed by the settlement trough. The enclosed area of the settlement trough can be related to the reference tunnel area. The outcome of this is the often used “volume loss”. The bottom line is that the horizontal deformations at the tunnel face lead to a higher volume loss. The volume loss can be put on a par with a reduction of the tunnel face stability (see, e.g., Clough and Schmidt [6], for undrained conditions). In cases of permeability in the range from about k = 2 × 10−8 m/s to k = 1 × 10−7 m/s one has to presume conditions of local or even total failure. According to Anagnostou [1] one has to assume in connexion with the herein shown calculations that drained conditions dominate for permeability greater than k = 2.5 × 10−7 m/s. In this context the calculated disproportionately increasing deformations seem to be quite realistic due to the fact that it is not possible to drive a tunnel below the groundwater table under more or less fully drained conditions without any face support. With a permeability of less than k = 1 × 10−8 m/s, comparatively small deformations occur. The permeability of the soil is so small in this case, that hardly any water flows towards the tunnel face within the excavation time and the additionally induced deformations therefore remain small within this period.
The development of the horizontal deformation of point A depends on the distance to the tunnel face, as presented in the longitudinal section in Fig. 5. The dashed curve corresponds to the computation with a permeability of k = 1 × 10−9 m/s, the solid curve to that of a twenty fold increased permeability of k = 2 × 10−8 m/s.

Horizontal deformation longitudinal to the tunnel axis
Based on the curves in Fig. 5, it is clear that the bulk of the horizontal deformations occurs in a range of 0.5D ahead of the tunnel face, thus within the length of a total excavation cycle. The range of the influential horizontal deformations can be described approximately by a hemisphere, whose centre is point A. In the range ahead of the tunnel face an arch arises in the longitudinal direction originating from the shotcrete lining. Within the arch the stability reducing seepage forces are minimised by the deformations and absorbed by the shear strength of the soil, the tunnel face stability is given.
4.2 Vertical deformation of the tunnel profile
In the same way the effect of the permeability on the horizontal deformation of the tunnel face is experienced, it is noticed that the tunnel profile deformation depends on the permeability of the soil, before the tunnel lining is activated (see Fig. 6). The vertical deformations of the crown and the invert are therefore taken into account after the 12th excavation cycle (the crown has already reached the monitoring section) depending on the permeability.

Vertical deformation of the tunnel profile
The tunnelling process leads to an uplift of the invert (presented by the dashed curves in Fig. 6) and to crown settlements (displayed as the solid curves). Whereas the amount of deformations of the crown and invert are nearly equal at a permeability k = 1 × 10−9 m/s, a clearly larger uplift of the invert than crown settlements occurs behind the tunnel face at a permeability k = 2 × 10−8 m/s. The crown is lined with shotcrete directly after reaching the monitoring section. This leads to the fact that the crown settlements hardly increase after reaching the monitoring section. The invert follows with a distance of D/2, so the lower part of the tunnel cross section is only supported by the remaining bench. After removing the bench, the lower part of the tunnel cross section is also lined with shotcrete. The abovementioned kind of modelling leads to the conclusion that after the tunnel face has reached the monitoring section the bench still experiences a notable heave. No more relevant deformations occur once the tunnel is completely lined.
As an example, Figure 7 shows the vertical deformations of the bench with a permeability of k = 2 × 10−8 m/s. For reasons of clarity, the lower bound of the scale of the vertical deformations is set to 50 mm. Noticeable uplift deformations point out the first indications of a seepage failure. However, this condition can only develop in higher permeable soils or when lower tunnelling rates prevail, which enables a sufficient flow rate towards the tunnel face. This condition is of little importance for the total stability of the tunnel face here.

Vertical deformations v z of the bench
4.3 Settlements at ground level
As a result of tunnelling in soft soils settlements will propagate to the ground level. In the final state the settlement trough transverse to the tunnel axis will approach the form of a normal distribution. If the tangential inclination of the settlement curve is too large, damage may occur to the buildings at ground level.
In the previous sections it could be shown that the deformations at the tunnel face substantially depend on the permeability of the subsoil and the tunnelling rate, respectively. The deformations arising in front of the tunnel face in turn influence the settlements at the ground level. It is therefore understandable that the permeability and the tunnelling rate respectively are of significant importance to the settlements.
For the calculation of the settlements, as already mentioned in Sect. 3.1, the dimensions of the model have been chosen in such a way, that the influence of the boundaries was minimised. Via the step-by-step simulation of the tunnelling process it is possible to determine the increment of settlements at the ground level for a single excavation cycle. The resulting settlements are taken as the basis for further analyses. Therefore the 12th excavation cycle has been chosen, at which the top heading has already reached the monitoring section in the middle of the model. The computed results for the permeability of k = 1 × 10−9 m/s and k = 2 × 10−8 m/s are shown in Figure 8.

Settlements in longitudinal direction due to the 12th excavation cycle
In both cases the maximum settlements for a single excavation step do not arise directly above the tunnel face, but a little ahead of it. This effect can be attributed to the horizontal deformations v y directed towards the tunnel, which also depend on the permeability. Behind the tunnel face a substantially smaller difference between the settlement curves can be observed in relation to the difference in front of the tunnel face. Attewell and Woodman [2] stated that the longitudinal settlement trough due to a single excavation cycle can be characterised by a Gaussian distribution. For the two settlement curves marginal differences opposite the Gaussian distribution exist. This can be explained by the time needed to compensate the excess pore pressures.
The accumulated settlement curve in longitudinal direction is shown in Fig. 9 for the case in which the top heading has reached the monitoring section. According to Attewell et al. [3] it can be expected that directly above the tunnel face approximately 50% of the maximum settlements occurred. This is in a quite good agreement with the herein shown calculations.

Accumulated settlement curve with top heading at monitoring section
The computed final settlement curve at the ground level transverse to the tunnel axis is shown in Fig. 10 for permeability values of k = 1 × 10−9 m/s and k = 2 × 10−8 m/s. According to Peck [12] the settlement curves transverse to the tunnel axis can also be described by a Gaussian distribution.

Settlement curve transverse to tunnel axis in the final state
A higher permeability results in larger settlements both in transverse and in longitudinal direction. This is caused in particular by higher deformations at the tunnel face and the tunnel profile due to a higher permeability, resulting in a higher volume loss at the ground level. The settlements decrease towards the boundaries of the model, whereby it can be assumed that the dimensions of the model are sufficiently selected as large enough for the evaluation of the surface settlements.
The tangent inclinations 1/n are shown in Fig. 11 for the abovementioned settlement curves transverse to the tunnel axis. The values are the maximum inclinations, determined for the point of inflection of the settlement curve. For comparison, the tangent inclination of 1/500 is indicated (dashed line) in Fig. 11, which can be considered as a critical value for slight damage to buildings.

Tangent inclination in the final state
Considering the permeability of the examined soils, it can be noted that a higher permeable soil causes a steeper settlement curve and thus a more critical tangent inclination and higher risk of damage.
4.4 Plastic zones in front of the tunnel face and tunnel face stability
The extent of the zone experiencing plastic strain in front of the tunnel face has a crucial influence on the stability of the tunnel face. In the following Fig. 12 the plastic zones close to the tunnel face are represented for permeability of k = 1 × 10−9 m/s and k = 2 × 10−8 m/s.

Plasticized zone for several permeability
In the region ahead of the tunnel face plastic deformation occurs. As shown in the previous sections, higher permeability of the subsoil leads to larger deformations in front of the tunnel face. Since more water can flow towards the tunnel face the deformations increase and the outcome of this is a higher redistribution of stresses. This effect in turn leads to an enlargement of the zones experiencing plastic strain. However, the so called global stability of the tunnel face is still ensured by the arch effect. In the context of this research the permeability considered are not so high that global failure arises.
The question arise that if a local failure in the vicinity of the tunnel face may occur by the loss of stability of soil with brittle behaviour, a global failure mechanism may be initiated. This is to be determined in the context of further investigations.
5 Conclusion and outlook
According to the present investigations the following statements can be made with respect to the deformations and the stability of the tunnel face:
-
•
There is a clear correlation between the permeability of the subsoil and the computed deformations at the tunnel face and along the tunnel profile, respectively. These in turn influence, due to a larger volume loss, the settlements at the ground level.
-
•
The influence of the permeability on the extent of the plastic zone ahead of the tunnel face can be shown in a similar manner. It is not possible to determine a realistic stability ratio for the tunnel face for the abovementioned problem with the typically applied phi-c-reduction. Therefore, only qualitative but no quantitative statements regarding the tunnel face stability can be made till now.
In order to be able to make statements regarding the time depending tunnel face stability, the deformations induced at the tunnel face as well as the volume loss should be considered. With reference to the chosen assumptions and considering the type of modelling further numerical investigations as well as laboratory tests and field measurements are currently being arranged and conducted at the Zentrum Geotechnik of the TU München:
-
•
Further calculations with the purpose of linking the volume loss and the tunnel face stability.
-
•
Partially drained triaxial tests on a remoulded clay to afford statements about the suitability of the herein used material model.
-
•
Back calculation of several subway projects which have been processed in Munich.
References
Anagnostou G (1995) The influence of tunnel excavation on the hydraulic head. Int J Numer Anal Methods Geomech 19:725–746
Attewell PB, Woodman JP (1982) Predicting the dynamics of ground settlement and its derivatives caused by tunnelling in soil. Ground Eng 15(8):13–22
Attewell PB, Yeates J, Selby AR (1986) Soil movements induced by tunnelling and their effects on pipelines and structures. Blackie and Son Limited, London
Biot MA (1956) General solutions of the equations of elasticity and consolidation for a porous material. J Appl Mech 23(2):91–96
Brinkgreve RBJ (2002) Plaxis—finite element code for soil and rock analyses
Clough GW, Schmidt B (1981) Design and performance of excavations and tunnels in soft clay. In: Soft clay engineering, Chap 8, pp 569–634
Duncan JM, Chang C-Y (1970) Nonlinear analysis of stress and strain in soils. J Soil Mech Found Div 96(SM4), pp 1629–1653
Franzius JN (2003) Behaviour of buildings due to tunnel induced subsidence. PhD thesis. Imperial College, University of London
Hellmich Ch, Ulm F-J, Mang HA (1999) Multisurface chemoplasticity. II: Numerical studies on NATM tunneling. J Eng Mech ASCE 125(6):702–713
RJ Mair, RN Taylor (1997) Bored tunnelling in the urban environment. In: Proceedings of the 14th international conference on soil mechanics and foundation engineering, vol 4, pp 2353–2385
Ohde J (1939) Zur Theorie der Druckverteilung im Baugrunde. Der Bauingenieur 20:451–459
Peck RB (1969) Deep excavations and tunneling in soft grounds. In: Proceedings of the 7th international conference on soil mechanics and foundation engineering. State of the art volume, pp 225–290
Schanz T, Vermeer PA, Bonnier PG (1999) The hardening soil model: formulation and verification. In: Proceedings plaxis symposium beyond 2000 in computational geotechnics, Amsterdam, Rotterdam: Balkema, pp 281–296
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Höfle, R., Fillibeck, J. & Vogt, N. Time dependent deformations during tunnelling and stability of tunnel faces in fine-grained soils under groundwater. Acta Geotech. 3, 309–316 (2008). https://doi.org/10.1007/s11440-008-0075-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11440-008-0075-y