
Abstract
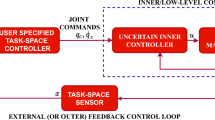
Derivation of control equations from data is a critical problem in numerous scientific and engineering fields. The inverse dynamic control of robot manipulators in the field of industrial robot research is a key example. Traditionally, researchers needed to obtain the robot dynamic model through physical modeling methods before developing controllers. However, the robot dynamic model and suitable control methods are often elusive and difficult to tune, particularly when dealing with real dynamical systems. In this paper, we combine an enhanced online sparse Bayesian learning (OSBL) algorithm and a model reference adaptive control method to obtain a data-driven modeling and control strategy from data containing noise; this strategy can be applied to dynamical systems. In particular, we use a sparse Bayesian approach, relying only on some prior knowledge of its physics, to extract an accurate mechanistic model from the measured data. Unmodeled parameters are further identified from the modeling error through a deep neural network (DNN). By combining the identification model with a model reference adaptive control approach, a general deep adaptive control (DAC) method is obtained, which can tolerate unmodeled dynamics. The adaptive update law is derived from Lyapunov’s stability criterion, which guarantees the asymptotic stability of the system. Finally, the Enhanced OSBL identification method and DAC scheme are applied on a six-degree-of-freedom industrial robot, and the effectiveness of the proposed method is verified.
Similar content being viewed by others

References
Wang L H. From intelligence science to intelligent manufacturing. Engineering, 2019, 5: 615–618
Day C P. Robotics in industry—Their role in intelligent manufacturing. Engineering, 2018, 4: 440–445
Brunton S L, Kutz J N. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control. Cambridge: Cambridge University Press, 2022
Byun J, Lee Y, Yoon J, et al. Electronic skins for soft, compact, reversible assembly of wirelessly activated fully soft robots. Sci Robot, 2018, 3: eaas9020
Li J, Gu J N, Huang Z D, et al. Application research of improved YOLO V3 algorithm in PCB electronic component detection. Appl Sci, 2019, 9: 3750
Lange F, Bertleff W, Suppa M. Force and trajectory control of industrial robots in stiff contact. In: 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, 2013. 2927–2934
Kumar S S, Kumar M P. Cycle time reduction of a truck body assembly in an automobile industry by lean principles. Procedia Mater Sci, 2014, 5: 1853–1862
Fathi M, Alvarez M J, Hassani Mehraban F, et al. A multiobjective optimization algorithm to solve the part feeding problem in mixed-model assembly lines. Math Problems Eng, 2014, 2014: 654053
Maropoulos P G, Muelaner J E, Summers M D, et al. A new paradigm in large-scale assembly-research priorities in measurement assisted assembly. Int J Adv Manuf Technol, 2014, 70: 621–633
Denney E, Pai G Automating the assembly of aviation safety cases. IEEE Trans Rel, 2014, 63: 830–849
Frigo M A, Silva E C C, Barbosa G F. Augmented reality in aerospace manufacturing: A review. J Ind Intell Inform, 2016, 4: 125–130
Teti R, Segreto T, Caggiano A, et al. Smart multi-sensor monitoring in drilling of CFRP/CFRP composite material stacks for aerospace assembly applications. Appl Sci, 2020, 10: 758
Yuan Y, Tang X, Zhou W, et al. Data driven discovery of cyber physical systems. Nat Commun, 2019, 10: 4894
Yuan Y, Ma G J, Cheng C, et al. A general end-to-end diagnosis framework for manufacturing systems. Natl Sci Rev, 2020, 7: 418–429
Kamnik R, Matko D, Bajd T. Application of model reference adaptive control to industrial robot impedance control. J Intell Robotic Syst, 1998, 22: 153–163
Wang H L. Adaptive control of robot manipulators with uncertain kinematics and dynamics. IEEE Trans Automat Contr, 2017, 62: 948–954
Malki H A, Misir D, Feigenspan D, et al. Fuzzy PID control of a flexible-joint robot arm with uncertainties from time-varying loads. IEEE Trans Contr Syst Technol, 1997, 5: 371–378
Morel G, Iagnemma K, Dubowsky S. The precise control of manipulators with high joint-friction using base force/torque sensing. Automatica, 2000, 36: 931–941
Gasparetto A, Boscariol P, Lanzutti A, et al. Trajectory planning in robotics. Math Comput Sci, 2012, 6: 269–279
Giordano A M, Garofalo G, De Stefano M, et al. Dynamics and control of a free-floating space robot in presence of nonzero linear and angular momenta. In: 2016 IEEE 55th Conference on Decision and Control (CDC). Las Vegas, 2016. 7527–7534
Bhaskar A, Dantu S, Roy S, et al. Adaptive artificial time delay control for bipedal walking with robustification to state-dependent constraint forces. In: 2021 20th International Conference on Advanced Robotics (ICAR). Ljubljana, 2021. 410–415
Roy S, Baldi S, Li P, et al. Artificial-delay adaptive control for under-actuated euler-lagrange robotics. IEEE ASME Trans Mechatron, 2021, 26: 3064–3075
Siciliano B, Khatib O. Springer Handbook of Robotics. Berlin, Heidelberg: Springer, 2008
Siciliano B, Sciavicco L, Villani L, et al. Robotics: Modelling, Planning and Control. Berlin, Heidelberg: Springer Publishing Company, Incorporated, 2008
Carron A, Arcari E, Wermelinger M, et al. Data-driven model predictive control for trajectory tracking with a robotic arm. IEEE Robot Autom Lett, 2019, 4: 3758–3765
Gautier M, Janot A, Vandanjon P O. A new closed-loop output error method for parameter identification of robot dynamics. IEEE Trans Contr Syst Technol, 2012, 21: 428–444
Shang W W, Cong S, Ge Y. Adaptive computed torque control for a parallel manipulator with redundant actuation. Robotica, 2012, 30: 457–466
Dias S, Queiroz K, Araujo A, et al. Robust control of robotic manipulators based on left inverse system and variable structure model reference adaptive control. Int J Adapt Control Signal Process, 2016, 30: 1389–1407
Zhang J F, Liu J, Hu R, et al. Online four dimensional trajectory prediction method based on aircraft intent updating. Aerospace Sci Tech, 2018, 77: 774–787
Fang G, Wang X M, Wang K, et al. Vision-based online learning kinematic control for soft robots using local Gaussian process regression. IEEE Robot Autom Lett, 2019, 4: 1194–1201
Unhelkar V V, Lasota P A, Tyroller Q, et al. Human-aware robotic assistant for collaborative assembly: Integrating human motion prediction with planning in time. IEEE Robot Autom Lett, 2018, 3: 2394–2401
Mordatch L Mishra N, Eppner C, et al. Combining model-based policy search with online model learning for control of physical humanoids. In: 2016 IEEE international conference on robotics and automation (ICRA). Stockholm, 2016. 242–248
Naets F, Croes J, Desmet W. An online coupled state/input/parameter estimation approach for structural dynamics. Comput Methods Appl Mech Eng, 2015, 283: 1167–1188
Wen C Y, Zhou J, Liu Z T, et al. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Trans Automat Contr, 2011, 56: 1672–1678
Madsen E, Rosenlund O S, Brandt D, et al. Comprehensive modeling and identification of nonlinear joint dynamics for collaborative industrial robot manipulators. Control Eng Pract, 2020, 101: 104462
Swevers J, Verdonck W, De Schutter J. Dynamic model identification for industrial robots. IEEE Control Syst Mag, 2007, 27: 58–71
Han Y, Wu J H, Liu C, et al. An iterative approach for accurate dynamic model identification of industrial robots. IEEE Trans Robot, 2020, 36: 1577–1594
Khalil W, Gautier M, Lemoine P. Identification of the payload inertial parameters of industrial manipulators. In: Proceedings 2007 IEEE International Conference on Robotics and Automation. Rome, 2007. 4943–4948
Lee S D, Jung S. Real-time inverse model estimation by a recursive least squares method for disturbance observer-based control systems: Balancing control of a single-wheel robot. Int J Control Autom Syst, 2019, 17: 1911–1920
Shen T, Dong Y L, He D X, et al. Online identification of time-varying dynamical systems for industrial robots based on sparse Bayesian learning. Sci China Tech Sci, 2022, 65: 386–395
Brunton S L, Proctor J L, Kutz J N. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc Natl Acad Sci USA, 2016, 113: 3932–3937
Pan W, Yuan Y, Goncalves J, et al. A sparse Bayesian approach to the identification of nonlinear state-space systems. IEEE Trans Automat Contr, 2016, 61: 182–187
Kingma D P, Ba J. Adam: A method for stochastic optimization. ArXiv: 1412.6980
Horowitz R, Tomizuka M. An adaptive control scheme for mechanical manipulators-compensation of nonlinearity and decoupling control. J Dynamic Syst Measurement Control, 1986, 108: 127–135
Swevers J, Ganseman C, Tukel D B, et al. Optimal robot excitation and identification. IEEE Trans Robot Automat, 1997, 13: 730–740
Kushida D, Nakamura M, Goto S, et al. Human direct teaching of industrial articulated robot arms based on force-free control. Artif Life Robotics, 2001, 5: 26–32
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Natural Science Foundation of China (Grant No. 52188102).
Rights and permissions
About this article

Cite this article
Shen, T., Qiao, X., Dong, Y. et al. Deep adaptive control with online identification for industrial robots. Sci. China Technol. Sci. 65, 2593–2604 (2022). https://doi.org/10.1007/s11431-022-2183-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-022-2183-7