
Abstract
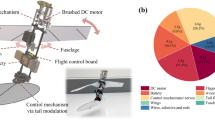
Flapping-wing flying insects possess various advantages, such as high agility and efficiency. The design and manufacture of insect-scale flapping-wing micro aerial vehicle (FWMAV) have attracted increasing attention in recent decades. Due to the limitations of size and weight, the FWMAV with an onboard battery which can fully mimic insect flight has not been achieved. In this work, we design and fabricate a highly integrated flapping-wing microrobot named Robomoth. The Robomoth consists of a carbon chassis, customized power and control devices, and two piezoelectric ceramic actuators symmetrically distributed in the thorax and controlled individually. It weighs 2.487 g, spans 5.9 cm in length, possesses 9 cm of wingspan, and carries a 0.355 g rechargeable lithium battery. We demonstrate the mobility of the Robomoth through untethered gliding and making turns on the water surface. A simplified dynamic model of the flapping system is proposed to explain the relationship between the driving frequency and the flapping amplitude. The Robomoth is one new untethered bioinspired flapping-wing robot that can perform stable water surface motion, which holds potential applications such as search and rescue on the water. The robot can also provide insight for designing insect-scale flying vehicles.
Similar content being viewed by others


References
Pornsin-sirirak T N, Tai Y, Ho C, et al. Microbat: A palm-sized electrically powered ornithopter. In: Proceedings of the NASA/JPL Workshop on Biomorphic Robotics, 2001. 17
Platzer M F, Jones K D, Young J, et al. Flapping wing aerodynamics: Progress and challenges. AIAA J, 2008, 46: 2136–2149
Bradshaw N, Lentink D. Aerodynamic and structural dynamic identification of a flapping wing micro air vehicle. In: Proceedings of the 26th AIAA Applied Aerodynamics Conference. Honolulu, Hawaii: American Institute of Aeronautics and Astronautics, 2008
Zhao L, Huang Q, Deng X, et al. Aerodynamic effects of flexibility in flapping wings. J R Soc Interface, 2010, 7: 485–497
Keennon M, Klingebiel K, Won H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle. In: Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Nashville, Tennessee: American Institute of Aeronautics and Astronautics, 2012. 588
Tu Z, Fei F, Deng X. Untethered flight of an at-scale dual-motor hummingbird robot with bio-inspired decoupled wings. IEEE Robot Autom Lett, 2020, 5: 4194–4201
Ramezani A, Shi X, Chung S J, et al. Bat Bot (B2), a biologically inspired flying machine. In: Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm, Sweden: IEEE, 2016. 3219–3226
Ramezani A, Chung S J, Hutchinson S. A biomimetic robotic platform to study flight specializations of bats. Sci Robot, 2017, 2: eaal2505
Dileo C, Deng X. Design of and experiments on a dragonfly-inspired robot. Adv Robot, 2009, 23: 1003–1021
Wood R J. Liftoff of a 60 mg flapping-wing MAV. In: Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego: IEEE, 2007. 1889–1894
Pérez-Arancibia N O, Whitney J P, Wood R J. Lift force control of flapping-wing microrobots using adaptive feedforward schemes. IEEE ASME Trans Mechatron, 2013, 18: 155–168
Jafferis N T, Helbling E F, Karpelson M, et al. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature, 2019, 570: 491–495
Chen Y, Helbling E F, Gravish N, et al. Hybrid aerial and aquatic locomotion in an at-scale robotic insect. In: Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg: IEEE, 2015. 331–338
Chen Y, Zhao H, Mao J, et al. Controlled flight of a microrobot powered by soft artificial muscles. Nature, 2019, 575: 324–329
Chukewad Y M, James J, Singh A, et al. Robofly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion. IEEE Trans Robot, 2021, 37: 2025–2040
James J, Iyer V, Chukewad Y, et al. Liftoff of a 190 mg laser-powered aerial vehicle: The lightest wireless robot to fly. In: Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, QLD: IEEE, 2018. 3587–3594
Chukewad Y M, Singh A T, James J M, et al. A new robot fly design that is easier to fabricate and capable of flight and ground locomotion. In: Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid: IEEE, 2018. 4875–4882
Fuller S B. Four wings: An insect-sized aerial robot with steering ability and payload capacity for autonomy. IEEE Robot Autom Lett, 2019, 4: 570–577
Hoff J, Syed U, Ramezani A, et al. Trajectory planning for a bat-like flapping wing robot. In: Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macau: IEEE, 2019. 6800–6805
de Croon G C H E, de Clercq K M E, Ruijsink R, et al. Design, aerodynamics, and vision-based control of the delfly. Int J Micro Air Vehicles, 2009, 1: 71–97
de Croon G C H E, Perçin M, Remes B D W, et al. The DelFly. Dordrecht: Springer Netherlands, 2016
Karásek M, Muijres F T, De Wagter C, et al. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science, 2018, 361: 1089–1094
Fei F, Tu Z, Yang Y, et al. Flappy hummingbird: An open source dynamic simulation of flapping wing robots and animals. In: Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), 2019. 9223–9229
Phan H V, Kang T, Park H C. Design and stable flight of a 21 g insectlike tailless flapping wing micro air vehicle with angular rates feedback control. Bioinspir Biomim, 2017, 12: 036006
Chin Y W, Kok J M, Zhu Y Q, et al. Efficient flapping wing drone arrests high-speed flight using post-stall soaring. Sci Robot, 2020, 5: eaba2386
Rosen M H, le Pivain G, Sahai R, et al. Development of a 3.2 g untethered flapping-wing platform for flight energetics and control experiments. In: Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm: IEEE, 2016. 3227–3233
Phan H V, Park H C. Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science, 2020, 370: 1214–1219
Hines L, Campolo D, Sitti M. Liftoff of a motor-driven, flapping-wing microaerial vehicle capable of resonance. IEEE Trans Robot, 2014, 30: 220–232
Zou Y, Zhang W, Zhang Z. Liftoff of an electromagnetically driven insect-inspired flapping-wing robot. IEEE Trans Robot, 2016, 32: 1285–1289
Wang C, Zhang W, Zou Y, et al. A sub-100 mg electromagnetically driven insect-inspired flapping-wing micro robot capable of liftoff and control torques modulation. J Bionic Eng, 2020, 17: 1085–1095
Wang C, Zhang W, Hu J, et al. A modified quasisteady aerodynamic model for a sub-100 mg insect-inspired flapping-wing robot. Appl BIon Biomech, 2020, 2020: 1–12
Wood R J. The First takeoff of a biologically inspired at-scale robotic insect. IEEE Trans Robot, 2008, 24: 341–347
Wood R J, Avadhanula S, Sahai R, et al. Microrobot design using fiber reinforced composites. J Mech Des, 2008, 130: 052304
Sane S P. The aerodynamics of insect flight. J Exp Biol, 2003, 206: 4191–4208
Wang Z J. Dissecting insect flight. Annu Rev Fluid Mech, 2005, 37: 183–210
Dickinson M H, Lehmann F O, Sane S P. Wing rotation and the aerodynamic basis of insect flight. Science, 1999, 284: 1954–1960
Srygley R B, Thomas A L R. Unconventional lift-generating mechanisms in free-flying butterflies. Nature, 2002, 420: 660–664
Wood R J, Avadhanula S, Menon M, et al. Microrobotics using composite materials: The micromechanical flying insect thorax. In: Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422). Taipei: IEEE, 2003. 1842–1849
Steltz E, Avadhanula S, Fearing R S. High lift force with 275 Hz wing beat in MFI. In: Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego: IEEE, 2007. 3987–3992
Finio B M, Whitney J P, Wood R J. Stroke plane deviation for a microrobotic fly. In: Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei: IEEE, 2010. 3378–3385
Finio B M, Wood R J. Distributed power and control actuation in the thoracic mechanics of a robotic insect. Bioinspir Biomim, 2010, 5: 045006
Truong N T, Phan H V, Park H C. Design and demonstration of a bioinspired flapping-wing-assisted jumping robot. Bioinspir Biomim, 2019, 14: 036010
Wood R J, Steltz E, Fearing R S. Optimal energy density piezoelectric bending actuators. Sens Actuat A-Phys, 2005, 119: 476–488
Mukundarajan H, Bardon T C, Kim D H, et al. Surface tension dominates insect flight on fluid interfaces. J Exp Biol, 2016, 219: 752–766
Zhou S, Zhang W, Zou Y, et al. Piezoelectric driven insect-inspired robot with flapping wings capable of skating on the water. Electron lett, 2017, 53: 579–580
Dadfarnia M, Jalili N, Xian B, et al. Lyapunov-based vibration control of translational Euler-Bernoulli beams using the stabilizing effect of beam damping mechanisms. J Vib Control, 2004, 10: 933–961
Dadfarnia M, Jalili N, Xian B, et al. A Lyapunov-based piezoelectric controller for flexible Cartesian robot manipulators. J Dynamic Syst Measurement Control, 2004, 126: 347–358
Chen Y, Ma K, Wood R J. Influence of wing morphological and inertial parameters on flapping flight performance. In: Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016. 2329–2336
St. Pierre R, Bergbreiter S. Toward autonomy in sub-gram terrestrial robots. Annu Rev Control Robot Auton Syst, 2019, 2: 231–252
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Natural Science Foundation of China (Grant No. 91748209), the 111 Project (Grant No. B21034), and the Key Research and Development Program of Zhejiang Province (Grant No. 2020C05010).
Rights and permissions
About this article

Cite this article
Chen, Y., Liu, Y., Liu, T. et al. Design and analysis of an untethered micro flapping robot which can glide on the water. Sci. China Technol. Sci. 65, 1749–1759 (2022). https://doi.org/10.1007/s11431-022-2064-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-022-2064-9