
Abstract
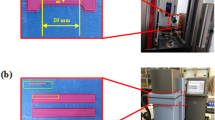
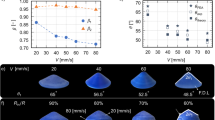
Deformation control of 4D printing has always been challenging. Herein, a design method for the fiber trajectory for 4D printing composite structures with embedded continuous fibers is reported, wherein the designed composite structures can be deformed into many types of deployable surfaces. Deformation of the bilayer composite structure was driven by differences in the coefficients of thermal expansion (CTEs) between the resin substrate and embedded fibers. The bending curvature and direction of the composite structure is controlled by adjusting fiber orientations. According to differential geometry theory, the relationship between the angle of intersecting fiber bundles and curvature of the final shape was obtained. Therefore, arbitrary deployable surfaces, including conical, cylindrical, and tangent surfaces, can be deformed. This design and additive manufacturing strategy allow precise control of the deforming process, greatly extending the potential applications of 4D printing.
Similar content being viewed by others

References
Momeni F, Hassani N S M, Liu X, et al. A review of 4D printing. Mater Des, 2017, 122: 42–79
Mao Y, Yu K, Isakov M S, et al. Sequential self-folding structures by 3D printed digital shape memory polymers. Sci Rep, 2015, 5: 13616
Yu K, Dunn M L, Qi H J. Digital manufacture of shape changing components. Extreme Mech Lett, 2015, 4: 9–17
Yu K, Ritchie A, Mao Y, et al. Controlled sequential shape changing components by 3D printing of shape memory polymer multimaterials. Procedia IUTAM, 2015, 12: 193–203
Hu Y, Liu J, Chang L, et al. Electrically and sunlight-driven actuator with versatile biomimetic motions based on rolled carbon nanotube bilayer composite. Adv Funct Mater, 2017, 27: 1704388
Kuksenok O, Balazs A C. Stimuli-responsive behavior of composites integrating thermo-responsive gels with photo-responsive fibers. Mater Horiz, 2016, 3: 53–62
Yuan C, Roach D J, Dunn C K, et al. 3D printed reversible shape changing soft actuators assisted by liquid crystal elastomers. Soft Matter, 2017, 13: 5558–5568
Dai M, Picot O T, Verjans J M N, et al. Humidity-responsive bilayer actuators based on a liquid-crystalline polymer network. ACS Appl Mater Interfaces, 2013, 5: 4945–4950
Raviv D, Zhao W, McKnelly C, et al. Active printed materials for complex self-evolving deformations. Sci Rep, 2015, 4: 1–8
Liu G, Zhao Y, Wu G, et al. Origami and 4D printing of elastomer-derived ceramic structures. Sci Adv, 2018, 4: eaat0641
Schmied J U, Le Ferrand H, Ermanni P, et al. Programmable snapping composites with bio-inspired architecture. Bioinspir Biomim, 2017, 12: 026012
Kim Y, Yuk H, Zhao R, et al. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature, 2018, 558: 274–279
Kim S W, Koh J S, Lee J G, et al. Flytrap-inspired robot using structurally integrated actuation based on bistability and a developable surface. Bioinspir Biomim, 2014, 9: 036004
Deng J, Li J, Chen P, et al. Tunable photothermal actuators based on a pre-programmed aligned nanostructure. J Am Chem Soc, 2016, 138: 225–230
Mendoza Jasso A J, Goodsell J E, Ritchey A J, et al. A parametric study of fiber volume fraction distribution on the failure initiation location in open hole off-axis tensile specimen. Compos Sci Tech, 2011, 71: 1819–1825
Malakhov A V, Polilov A N. Design of composite structures reinforced curvilinear fibres using FEM. Compos Part A-Appl Sci Manufacturing, 2016, 87: 23–28
Huber C, Abert C, Bruckner F, et al. 3D printing of polymer-bonded rare-earth magnets with a variable magnetic compound fraction for a predefined stray field. Sci Rep, 2017, 7: 9419
Sydney Gladman A, Matsumoto E A, Nuzzo R G, et al. Biomimetic 4D printing. Nat Mater, 2016, 15: 413–418
Siéfert E, Reyssat E, Bico J, et al. Bio-inspired pneumatic shape-morphing elastomers. Nat Mater, 2019, 18: 24–28
Yang C, Wang B, Li D, et al. Modelling and characterisation for the responsive performance of CF/PLA and CF/PEEK smart materials fabricated by 4D printing. Virtual Phys Prototyping, 2017, 12: 69–76
Wang Q, Tian X, Huang L, et al. Programmable morphing composites with embedded continuous fibers by 4D printing. Mater Des, 2018, 155: 404–413
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Key R&D Program of China (Grant Nos. 2017YFB1103401, 2016YFB1100902), and the National Natural Science Foundation of China (Grant Nos. 51575430, 51811530107).
Rights and permissions
About this article

Cite this article
Tian, X., Wang, Q. & Li, D. Design of a continuous fiber trajectory for 4D printing of thermally stimulated composite structures. Sci. China Technol. Sci. 63, 571–577 (2020). https://doi.org/10.1007/s11431-019-1485-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-019-1485-5