
Abstract
Using the basic equations for stereo-vision with established procedures for camera calibration, the error propagation equations for determining both bias and variability in a general 3D position are provided. The results use recent theoretical developments that quantified the bias and variance in image plane positions introduced during image plane correspondence identification for a common 3D point (e.g., pattern matching during measurement process) as a basis for preliminary application of the developments for estimation of 3D position bias and variability. Extensive numerical simulations and theoretical analyses have been performed for selected stereo system configurations amenable to closed-form solution. Results clearly demonstrate that the general formulae provide a robust framework for quantifying the effect of various stereo-vision parameters and image-plane matching procedures on both the bias and variance in an estimated 3D object position.











Similar content being viewed by others

Notes
When x is n-dimensional, the covariance matrix (also called the variance-covariance matrix) is usually denoted Var(x) and has the expression:
$$ Var({\mathbf{x}}) = E(({\mathbf{x}} - E({\mathbf{x}})){({\mathbf{x}} - E({\mathbf{x}}))^T}) = \left[ {\begin{array}{*{20}{c}} {{\sigma_{{x_1}}}^2} & {{\rm cov} ({x_1},{x_2})} & . & . & {{\rm cov} ({x_1},{x_n})} \\{{\rm cov} ({x_2},{x_1})} & {{\sigma_{{x_2}}}^2} & . & . & . \\. & . & . & . & . \\. & . & . & . & . \\{{\rm cov} ({x_n},{x_1})} & . & . & . & {{\sigma_{{x_n}}}^2} \\\end{array} } \right] $$The cost function is usually obtained from bundle adjustment or other similar optimization methods.
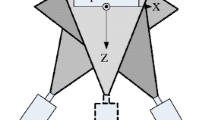
The initial world system orientation relative to the camera 1 system is commonly used as the reference for all 3D measurements. For this reason, it is separated from the remaining Nviews extrinsic parameter variables.
During calibration, it is common to arrange the initial world system to coincide with the planar grid/dot pattern configuration and thereby simplify the analysis.
It is assumed that the radial distortion model provides an exact representation for the deviations relative to the pinhole model.
Figure 1 assumes ideal pinhole model projection to simplify the presentation.
The large subset size was selected to be consistent with use of previously published experimental data [13]. The large subset size was used to obtain sufficient pattern density and local contrast for accurate matching, since the pattern was quite coarse at the high magnification employed by the authors to achieve pixel translations in increments of ≈ 0.07 pixels.
References
Slama C (Ed.) (1980) The manual of photogrammetry, The American Society of Photogrammetry
Haralick RM (1994) Propagating covariance in computer vision. Proc. IAPR Int’l Conf. Pattern Recognition, pp. 493–498, Oct
Liu X (1995) Modeling and performance characterization of 3D parameter estimation using perspective geometry. PhD Dissertation, Univ. of Washington, Seattle
Liu X, Kanungo T, Haralick RM (2005) On the use of error propagation for statistical validation of computer vision software. IEEE Transaction on Pattern Analysis and Machine Intelligence, Vol. 27, No. 10, Oct
Sanders-Reed JN (2001) Error propagation in two-sensor 3D position estimation. Optical Eng 40 (4) April
Kanatani K (1996) Statistical optimization for geometric computation: theory and practice. Elsevier Science
Chowdhury AR, Chellappa R (2003) Statistical error propagation in 3D modeling from monocular video. Proc. IEEE Workshop Statistical Analysis in Computer Vision
Mühlich M, Mester R (2004) Unbiased errors-in-variables estimation using generalized eigensystem analysis. ECCV Workshop SMVP
Chojnacki W, Brooks MJ, van den Hengel A, Gawley D (2004) A new constrained parameter estimator for computer vision applications. Image and Vision Computing
Hu Z, Tan Z (2005) Calibration of stereo cameras from two perpendicular planes. Applied Optics. 44(24), August
Hassanpour R, Atalay V (2006) Experimental study on the sensitivity of autocalibration to projective camera model parameters. Optical Engineering, April
Zhang Z (1999) A flexible new technique for camera calibration, technical report MSR-TR-98-71. Microsoft Corporation, March
Wang YQ, Sutton MA, Bruck HA, Schreier HW (in press) Journal of Strain
Sutton MA, Orteu JJ, Schreier HW, Image correlation for shape motion and deformation measurements, ISBN# 978-0-387-78747 3 Springer (2009).
Acknowledgements
The financial support of Sandia National Laboratory and the technical advice and support of Dr. Timothy Miller and Dr. Phillip Reu through Sandia Contract PO#551836, the support of Dr. Bruce Lamattina through ARO# W911NF-06-1-0216 and the support provided by Dr. Stephen Smith through NASA NNX07AB46A are gratefully acknowledged. In addition, the research support provided by the Department of Mechanical Engineering at the University of South Carolina is also gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wang, YQ., Sutton, M.A., Ke, XD. et al. On Error Assessment in Stereo-based Deformation Measurements. Exp Mech 51, 405–422 (2011). https://doi.org/10.1007/s11340-010-9449-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-010-9449-9