
Abstract
This paper presents a new contactless and frictionless pure bending technique for material testing purposes, along with a practical realization thereof. A contactless pure bending mode is realized through the relative rotations of two clamps that are mounted on frictionless sliders. The proposed generic device allows for large rotations, cyclic loading, reversed loading, creep testing, relaxation testing and is well-suited to test different classes of materials. On top of the classical benefits for materials testing through bending, a few illustrative examples are given that emphasize the potential of this bending instrument for particular material tests.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Standardized mechanical tests exist for many decades and have contributed significantly to the development of engineering materials and devices. Among these, bending tests received particular interest, since these are non-uniform tests that are representative for many practical loading conditions, and they are less prone to geometrical instabilities (necking, buckling, etc.). Most standardized bending tests rely on 3-point, 4-point or cantilever bending tests, which put restrictions on the sample geometry, the tested cross-sections, the contribution of the local contact areas, etc. Furthermore, cyclic tests and reversed loading tests cannot be performed in a straightforward manner.
A local state of pure bending has been used abundantly in the literature to test materials, beams, pipes, structures, etc. Bending states are often combined with other strain states in more complex tests, see e.g. [1] and [2] for stretch bending analyses. Special 3-point bending constructions for reversed bending have been proposed and used as well [3]. The versatility of using a bending test for materials characterization was already commented in [4]. Cyclic testing constituted the major drive in seeking for bending-unbending devices [5, 6]. In the past decade, there have been only a few attempts towards the development of a (more) generic pure bending device, where most concepts are inspired by sheet metal testing. A simplified version of a pure bending test was presented in [7], where the relevance of testing in a pure bending state has been particularly emphasized. A pure bending device based on a rotating clamp and two sliders was proposed in [8], whereas a bending-unbending solution based on Oldham couplings was used in [9]. The two sliders or the Oldham coupling were used to compensate for normal forces (or allowing for a variable distance between the two rotation axes), but involved some frictional resistance. Very particular set-ups, aiming for case-specific requirements, have been proposed in literature as well, e.g. [10] for testing the rat femur, [11] for testing circular tubes, [12] for testing spine specimens. More recently, Zineb et al. [13] presented a pure bending device for testing composite structures, yet still departing from a kinematic structure to be mounted in a tensile device. Nevertheless, clear arguments were already provided in this paper to motivate pure bending tests over classical 4-point bending tests.
In the patent literature, most patents offer an innovative manner to bend materials and structures from a manufacturing perspective. Only few patents can be identified that propose a pure bending test machine for materials testing purposes, among which the patent of Peterson [14] is one of the oldest. The US Patent 7017423 B2 of 2006 by Calloch et al. [15] departs partially from similar specifications as the presented device here, though using a totally different and more restrictive complex solution. In most existing patents, the contactless and frictionless characteristics presented in this paper cannot be identified, i.e. contact and/or friction remains systematically present.
Even though it is sometimes possible to correct experimental data for the parasitic role of contact and friction in a testing set-up, this is generally not the case. The following shortcomings are intrinsic to a set-up that is prone to contact or friction:
-
Local contact induces local deformations (indentations), which cannot always be determined exactly from a global displacement measurement. This is particularly relevant if soft materials are to be tested.
-
Applying a bending load through local contact (3-point or 4-point bending) usually obstructs the field of view at the top or bottom surface, which makes the use of digital image correlation techniques troublesome. In a contactless set-up, all surfaces (and through thickness side faces) can be kept visible.
-
Large deformations require large bending angles, which cannot be trivially realised in contact-based set-ups. A rotation of 180° cannot be realized trivially.
-
Contact-based bending set-ups cannot be used to imposed cyclic bending loads, since the loads are usually transmitted through contact pressures only.
-
Bending set-ups without contact often make use of a linear guide, which is not frictionless. The presence of friction in a set-up typically introduces parasitic forces and moments that depend on the friction coefficient.
-
The presence of friction in a set-up usually introduces hysteresis in cyclic tests, which comes on top of the intrinsic hysteresis of the material tested. Calibrating this device hysteresis (both due to frictional sliding and rotating) for a range of loads, displacements and rotations is far from trivial.
-
The role of friction becomes increasingly important if the set-up is miniaturized, e.g. to test samples in bending in combination with microscopy.
-
Finally, it should be noted that if an experimental test is simulated numerically for material model identification or validation, proper characterization and incorporation of contact and friction contributions is generally not trivial.
These concerns justify the development of a contactless and frictionless bending device.
This paper does not intend to provide more details on analytical couple-curvature relations in the nonlinear range, since this is a subject that is already well documented in literature. It is known that bending tests are well suited to e.g. determine the parameters relevant for the strain hardening in engineering materials. We intend to go a major step beyond the pure bending tests for materials testing currently available. The potential of a contactless and frictionless bending apparatus is multiple:
-
Carry out standard mechanical tests for non-homogeneous strain states
-
Test materials in a regime where several geometrical instabilities do not occur
-
Carry out reversed loading tests, whereby elastic springback or Bauschinger effects can be optimally studied
-
Enable large amplitude cyclic loading
-
Enable stable large strain tests
-
Enable creep and relaxation tests in pure bending conditions, which is particularly relevant for time-dependent material behaviour
With this paper, the authors hope to share this generic versatile technique with the experimental mechanics community, for which particular applications have already been addressed by several research groups (e.g. see [16]). It is believed that further technological developments in this direction will lead to steadily improving bending machines, that may become a standard tool in many materials research labs. The potential of the bending apparatus presented in this paper goes beyond the practical realization at hand now. Downscaled and upscaled versions of this device may be well explored, covering a wide range of samples and materials (or thin films) to be tested at different dimensions.
Key Principles and Requirements
The requirements imposed on the realization of this specific bending apparatus are:
-
allow for true pure bending in the entire specimen, without any superimposed normal tractions (at least pure bending for a perfectly isotropic material with no geometric sample defects)
-
well-defined and reproducible testing conditions
-
allow for rotation angles up to 180 degrees
-
allow for positive and negative rotations
-
the loading may not be transmitted by punctual or local application of forces
-
upon bending, no friction may develop in the device or in the load transmission
-
allow for large amplitude cyclic loading
-
allow for relaxation tests by prescribing a fixed rotation angle and monitoring the bending moment over time
-
allow for creep tests by prescribing a fixed bending moment and monitoring the rotation angle over time.
-
adapt to different sizes of specimen sheets of different thicknesses
-
autonomous operation, i.e. without relying on a standard tensile tester
The requirements above typically rule out all conventional bending tests, based on contact (3-point or 4-point bending) within a standard tensile machine. To realize the requirements above, the bending device will have to be equipped with rotation clamps that can move with respect to each other in a frictionless manner. Rotation angles and bending moments are to be monitored throughout the entire experiment, both in loading and unloading. Furthermore, the specimen surface and/or side faces must be visible, in order to make use of DIC-based (Digital Image Correlation) methods for strain mapping.
Contactless and Frictionless Pure Bending Equipment
General Description
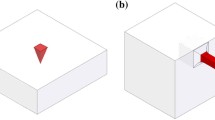
A schematic picture of the pure bending device is shown in Fig. 1. The device is constructed on the base of a rectangular sample (5), firmly clamped at its two opposite edges by a pair of hydraulically actuated clamps (3 & 4). The clamps are individually mounted on two air suspended linear guides (1 & 2) that can move frictionless along and around the axes of two cylinders (8 & 9). Because the linear guides are positioned at a relative angle of 90 degrees, no lateral force can be transferred from one clamp to the other. This means that whenever a sample is positioned in the device, the axial and rotational clamp positions are completely determined by the edges of the sample.

Contactless and frictionless pure bending device. The left clamp records the bending moment whereas the right clamp provides the rotation of the sample
Upon bending, the virtual rotation point of the device during the experiment is determined by the sample as well. One of the clamps (4) imposes the rotation, as indicated in Fig. 1, whereas the other clamp (3) registers the applied bending moment. The latter is obtained by making use of an elastic joint (6) in combination with a set of strain gauges. The whole setup is mounted on a solid frame (7). The device can be operated in two different modes: (i) rotation controlled (at constant rotation speed) and (ii) bending moment controlled. The second mode is particularly useful for the analysis of elastic springback effects.
Note that, strictly speaking, it is of course never possible to fully eliminate parasitic effects from material and geometrical imperfections. A slight material anisotropy may be enough to trigger such effects, even if there is no initial curvature defect present. In this respect, special attention has to be given to the active frictionless degrees-of-freedom of the system. Relative sliding of the 2 rotation clamps is frictionless, i.e. no parasitic resulting normal force can exist. Rotation of the clamps around the linear guides is also frictionless, i.e. a resulting parasitic twisting moment cannot be transmitted to the guide neither. This however does not guarantee that the kinematics will be pure bending, since this depends on the material anisotropy as well. It is pure bending in the sense that only a bending moment or rotation is prescribed.
Technical Specifications
Based on the key requirements and the general description given above, a contactless and frictionless pure bending stage was manufactured. The device is shown in Fig. 2, presenting the entire device mounted on its solid frame and a detail of the specimen mounted in its clamps. The red counterweight visible in the picture allows to align both clamps, to prevent any torsional effects upon clamping a specimen. The need for a counterweight directly results from the fact that the clamps rotate in a frictionless manner around the linear guides. Without any sample mounted, the clamps should be parallel and in a vertical position for all rotation angles, which can only be controlled with a counterweight. The counterweight ensures that the centre of gravity of the whole clamp lies directly under the centerline of the linear guide.

Photo of the operational bending device mounted on its frame (left) and a photo of a sample fixed in the clamps of the device (right)
A technical drawing of the entire bending frame is presented in Fig. 3, revealing the overall dimensions, constructive aspects and the positioning of the clamps on the linear guides.

Bending frame, with geometrical dimensions and overall construction details
A detail of the clamping arrangement is shown in Fig. 4, where the measurement principle of the bending moment is revealed. The bending moment is recorded by the left clamp which is equipped with a strain gauge. A Hottinger measurement amplifier provides an input voltage to the strain gauge and translates the analogue output voltage into the measurement control box where a digital signal is generated at a sample rate of 20 ms with a resolution of 12 bits. The right clamp can be rotated between 0 and 180 degrees by using a Kollmorgen DC motor with a total gear reduction ratio of 6192:1. Before each experiment, the setup has to be initialized. During this initialization procedure, several end switches are activated which are used to determine the absolute angle position with respect to the left clamp. After the initialization procedure, a pure bending experiment can be started. The operator has to choose the final angle and angular velocity of the right clamp. The control box measures the position and velocity of the right clamp by means of a Haidenhain encoder. The position is controlled with a 10 bit A/D module at a sample rate of 100 ms. The angle position can be controlled with a resolution of 0.175 degrees. Further technical specifications of this device are listed below:
-
dimensions of the solid frame ≈ 1 m × 1 m × 0.5 m.
-
bending moment resolution = 0.06 Nm for a maximum range of 250 Nm; 0.012 Nm for a maximum range of 50 Nm
-
bending moment range: −250 Nm \(\leftrightarrow\) 250 Nm
-
angular resolution = 0.175°
-
rotation range: \(-90^{\,\circ}\: \leftrightarrow\: +90^{\,\circ}\) or \(0^{\,\circ}\: \leftrightarrow\: +180^{\,\circ}\) depending on the geometry of the clamps used
-
maximum rotation: 180 ° for a sample width of 80 mm; 125 ° for a sample width of 30 mm
-
maximum rotation speed: 180 °/min
-
minimal total specimen dimensions [width × height] = 30 mm × 20 mm
-
maximum total specimen dimensions [width × height] = 80 mm × 100 mm
-
clamping width: 2 × 10 mm (10 mm in each clamp)
-
range clamping thickness: 0.1–3 mm
-
angle-controlled or moment-controlled (PID feedback loop with a sample time of 100 ms)
Note however, that there are ample ways to extend or improve these specifications by rescaling the geometry and/or making different (or more optimal) choices for the control and the electronics. The contactless and frictionless bending device hinges on a general principle, that allows for alternative designs with different specifications if needed.

Loading clamps, with visible sample mounted in the clamps and load cell for the bending moment measurement
A typical undeformed and deformed sample shape is shown in Fig. 5, along with the auxiliary clamps that allow for reversed rotation angles.

Undeformed and deformed samples (left); mounted sample in the auxiliary clamps that allow for a reversed rotation angle (right)
Illustrative Applications
In this section, emphasis is given on two illustrative examples, for which the developed bending device has proven to be a major added value in experimental testing. Particular attention is given to the role of the bending process and the proposed solution, whereas the detailed interpretation of the measurement results is obviously part of other research projects.
Experimental Analysis of Strain Path Changes
The analysis of strain path effects in metals attracts considerable attention nowadays, since modern advanced metallic alloys (dual-phase steels, TRIP steels, TWIP steels, aluminum alloys) are quite sensitive to strain path changes. Such analyses are often done by sequences of uniform tensile tests and shear tests, whereas non-uniform strain states are dominating in the engineering practice. Accurate control of spring-back in metal forming requires appropriate tests that probe the strain path changes in reproducible and realistic circumstances. The potential of using a pure bending set-up for strain path changes is illustrated in Fig. 6, in which a reversed and an orthogonal strain path change is presented, whereby the different possible processing steps are marked. A rectangular flat sample 1 is clamped in the device 2 and a positive angle is applied in steps 3 to 6. The maximum positive angle is 180 degrees. Next, the rotation is reversed in step 7, until the bending moment is zero in step 8. The angle difference between step 7 and 8 is exactly the elastic springback after the 180 degrees positive rotation. At this point the sample can be taken out of the device in step 20, e.g. to investigate the microscopic structure by Orientation Image Microscopy (OIM). Alternatively, the sample can also be bent to its neutral position in step 12 and even further to a maximum negative angle of − 90 degrees. If the negative angle in step 13 is sufficient to finish with a bending moment and a rotation angle equal to zero in step 15, a complete cycle has been carried out and the flat sample can be taken out in step 16, yet carrying a particular deformation history. Then, either reversed loading (Bauschinger test) can be applied by repeating the previous cycle or orthogonal loading can be applied. For the latter choice, the clamped edge parts have to be removed from the center part in step 18, since these parts of the sample did not plastically deform during the first cycle. Then the sample is rotated by 90 degrees and clamped in the device again. These steps can be varied in order to apply a well defined deformation history to the material. It must be noted that the material in between the clamps undergoes a uniform deformation in the plane of the sheet, whereas the strain distribution through the material thickness is non-uniform.

Schematic representation of strain path changes making use of a pure bending set-up, allowing for a reversed loading test and an orthogonal strain path test
With this bending test at hand, it was possible to identify shortcomings in some advanced models, for which certain parameters were extracted from uniform tension-shear tests. The model used to analyze these strain path changes was a modified Teodosiu model [17–19], which was tested on a common IF steel (DC06 automotive steel, manufactured at Corus RD&T in the Netherlands). Two strain path change tests were examined on the basis of the pure bending equipment. First, the material is prestrained. To this purpose, a rectangular sample with dimensions of 40 mm × 100 mm × 0.7 mm (effective width of 20 mm) is bent three times to an angle of 135 ° and back (to 0 °). Next, a negative rotation angle of 7 ° is applied to neutralize the spring-back stresses, after which the sample can be taken out of the device. From this prestrained specimen, two samples are prepared with dimensions 40 mm × 20 mm × 0.7 mm (effective width of 20 mm). One of these samples is used for a reversed pure bending test, and the other sample is used for an orthogonal pure bending test. The identified material response from these successive bending tests is shown in Fig. 7. The left graph in Fig. 7 shows the numerical-experimental response during the pure bending pre-straining stage, whereas the right graph shows the response after the strain path change. These figures well reveal the model accuracy, along with the sensitivity of the bending tests to such strain path changes. Details of the successful use of this bending test for parameter identification purposes in this context can be found in [20] or [21]. Note the spikes on the signal of the recorded bending moment below 1 Nm, which are essentially due to the lack of damping of the inertia effects (upon accelerating the mass in its rotation) in the absence of friction (which can be improved in a re-design).

Application of the bending test to determine parameters for an advanced strain path dependent plasticity model: pre-straining through 3 cycles of pure bending (left); orthogonal and reversed bending test following pre-straining (right). Experimental results and model predictions are confronted
Experimental Analysis of Transforming Metastable Steels
A second characteristic example of what a contactless and frictionless pure bending test can provide, is next presented for a metastable maraging steel. Austenitic stainless steels is a commercially important class of alloys used in a large variety of applications due to their excellent corrosion resistance, high strength, good ductility and toughness [22]. The excellent mechanical properties of these steels are partially due to the phase transformation of metastable austenite to martenste, which takes place during mechanical loading at ambient temperatures. The phase transformation is a complex mechanism, accompanied by volume and shape changes of the transforming domains in the microstructure. This volume change triggers an intrinsic sensitivity to the occurring stress state, and becomes particularly visible in bending tests.
The particular material tested here is commercialized under the name NanoflexTM by Sandvik [23], which is used by Philips to produce shaver components. In order to illustrate the potential of bending analyses for this material, a few bending tests have been carried out on NanoflexTM. A bending deformation is particularly relevant from a manufacturing perspective, as an example of a multistep forming operation in producing shaver components, among which several bending sequences.
The deformed cross sections for different bending angles have been analyzed to identify the amount of martensite as a result of the phase transformation, see Fig. 8. This figure clearly shows that the amount of martensite produced on the tensile side of the specimen is larger, which well accommodates the shape and volume change of the transformed martensite. The bending angle of 45 ° has hardly any martensite on the compressive side, whereas the tensile side already transformed to a considerable extent. Upon increasing the bending angle further, the mechanical driving force to trigger the phase transformation on the compressive side becomes large enough and martensite also starts to appear here. Such results are quantitative and characteristic for non-uniform strain distributions as they appear in the engineering practice. The bending results constitute a major added value to identify and validate material models that aim to describe these complex phenomena.

Pure bending of Nanoflex strips for different bending angles, revealing the mechanically-induced effect of the martensitic phase transformation. The martensitic phase is the dark phase in the micrographs on the right; austenite is the light phase. The effects of the amount of strain, along with an evolving compression-tension asymmetry, are clearly visible
In order to elucidate the potential of the pure bending test further, a small comparative analysis has been carried out on a classical steel (St37) and the Nanoflex material, see Fig. 9. A continuous bending deformation from 0 ° to 120 ° was carried out and compared to an intermittent discontinuous bending deformation. The latter operation was carried out in steps of 5 °, where an unloading-reloading step was introduced. As expected, the classical non-transforming steel does not reveal particular differences between the continuous and the discontinuous bending path. The Nanoflex steel on the other hand, shows strong kinematic effects upon unloading and reloading whereby the resulting moments deviate considerably from the continuous curve. These kinematic effects are the net result of the transformation in the steel upon deformation, which produce a pronounced spring-back effect upon unloading. With this bending test at hand, such effects can be optimally and quantitatively studied in either creep conditions, relaxation conditions or cyclic loading conditions.

Comparison of a continuous-discontinuous bending scheme for a standard steel (left) and Nanoflex (right), revealing strong kinematic and springback effects in the mechanical behaviour of Nanoflex
Conclusions and Outlook
Pure bending is a well-known test that has been largely documented in literature. Almost all practical realisations of a bending test involve shear and normal loading as well, whereas the few pure bending tests reported typically involve contact (for loading) and/or friction to realize the pure bending conditions. This paper focused on a contactless and frictionless pure bending test, which is realized through the relative rotations of two clamps that are mounted on frictionless air suspended sliders. The concept has been manufactured and an operational device is nowadays being used as a generic bending tester for materials characterization purposes.
The originality of this bending test and the device realized resides in its intrinsic ability to handle large rotations, large strains, cyclic loading, reversed loading, creep tests and relaxation tests. It is believed that this concept offers a realistic opportunity to use the proposed device as a generic testing machine in materials research. Particular applications at hand involve: the analysis of strain-path effects in metals and polymers, time-dependent behaviour in non-uniform stress states, stress or strain induced martensitic transformations, tension-compression asymmetry, kinematic hardening effects, spring-back analyses, etc.
Beyond the particular realization of the pure bending tester presented here, smaller and larger designs of this bending test device seem to be well feasible. This would allow to span a wide range of specifications for different materials, with samples of different geometries, ultimately incorporating thin flexible foils or films as well.
References
Kuwabara T (2007) Advances in experiments on metal sheets and tubes in support of constitutive modeling and forming simulations. Int J Plast 23(3):385–419
Yoshida M, Yoshida F, Konishi H, Fukumoto K (2005) Fracture limits of sheet metals under stretch bending. Int J Mech Sci 47(12):1885–1896
Geng LM, Shen Y, Wagoner RH (2002) Anisotropic hardening equations derived from reverse-bend testing. Int J Plast 18(5–6):743–767
Mayville RA, Finnie I (1982) Uniaxial stress–strain curves from a bending test. Exp Mech 22(6):197–201
Weinmann KJ, Rosenberger AH, Sanchez LR (1988) The Bauschinger effect of sheet metal under cyclic reverse pure bending. In: Annals of the CIRP, vol 37, pp 289–293
Sanchez LR (2000) A new cyclic anisotropic model for plane strain sheet metal forming. Int J Mech Sci 42(4):705–728
Perduijn AB, Hoogenboom SM (1995) The pure bending of sheet. J Mater Process Technol 51:274–295
Yoshida F, Urabe M, Toropov VV (1998) Identification of material parameters in constitutive model for sheet metals from cyclic bending tests. Int J Mech Sci 40(2–3):237–249
Brunet M, Morestin F, Godereaux S (2001) Nonlinear kinematic hardening identification for anisotropic sheet metals with bending-unbending tests. J Eng Mater Technol—Trans ASME 123(4):378–383
Engesaeter LB, Ekeland A, Langeland N (1978) Methods for testing the mechanical properties of the rat femur. Acta Orthop 49(6):512–518
Pan WF, Wang TR, Hsu CM (1998) A curvature-ovalization measurement apparatus for circular tubes under cyclic bending. Exp Mech 38(2):99–102
Lysack JT, JP Dickeyb GAD, Yen D (2000) A continuous pure moment loading apparatus for biomechanical testing of multi-segment spine specimens. J Biomech 33(6):765–770
Zineb TB, Sedrakian A, Billoet JL (2003) An original pure bending device with large displacements and rotations for static and fatigue tests of composite structures. Composites: Part B 34:447–458
Peterson RL (1960) Material bending apparatus. US Patent 2937689
Calloch S, Dureisseix D, Arnold G, Rovira IZ (2006) Method, device and machine for pure bending test optionally alternating. US Patent 7017423 B2
Delannay L, Pierman AP, Jacques P (2009) Mean-field micro-macro modelling of the bending and unbending of trip-aided multiphase steel sheet. Adv Eng Mater 11:148–152
Teodosiu C, Hu Z (1998) Microstructure in the continuum modelling of plastic anisotropy. In: Proceedings of the 19th Risø international symposium on material’s science: modelling of structure and mechanics of materials from microscale to product, pp 149–168. RisøNational Laboratory, Roskilde
Haddadi H, Bouvier S, Banu M, Maier C, Teodosiu C (2006) Towards an accurate description of the anisotropic behaviour of sheet metals under large plastic deformations: modelling, numerical analysis and identification. Int J Plast 22(12):2226–2271
Wang J, Levkovitch V, Svendsen B (2006) Modeling and simulation of directional hardening in metals during non-proportional loading. J Mater Process Technol 177(1–3):430–432
Boers SHA (2006) Optimum forming strategies with a 3D reconfigurable die. Ph.D. thesis, Eindhoven University of Technology
Boers SHA, Schreurs PJG, Geers MGD, Levkovitch V, Wang J, Svendsen B (2009) Experimental characterization and model identification of directional hardening effects in metals for complex strain path changes. Int J Solids Struct (in press)
Marshall P (1984) Austenitic stainless steels, microstructure and mechanical properties. Elsevier, London
Post J (2004) On the constitutive behavior of sandvik nanoflex. Ph.D. thesis, University of Twente
Acknowledgements
We gratefully acknowledge the original work done by Stan Hoogenboom on the technological development of this pure bending device, on which he worked for many years before retiring from our Department.
Open Access
This article is distributed under the terms of the Creative Commons Attribution Noncommercial License which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This is an open access article distributed under the terms of the Creative Commons Attribution Noncommercial License (https://creativecommons.org/licenses/by-nc/2.0), which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
About this article
Cite this article
Boers, S.H.A., Geers, M.G.D. & Kouznetsova, V.G. Contactless and Frictionless Pure Bending. Exp Mech 50, 683–693 (2010). https://doi.org/10.1007/s11340-009-9257-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-009-9257-2