
Abstract
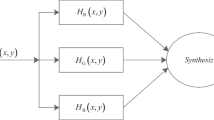
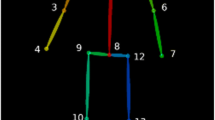
Tracking the trajectory of dribble directional shooting in the video image is beneficial to improve the basketball training skills. In this paper, the trajectory tracking method of dribble directional shooting based on the symmetrical algorithm is proposed. The symmetric differential algorithm is used to segment the video image of the dribble directional shooting. In the segmented image sequence, the range of motion of the dribble directional shooting is detected every three consecutive frames. Through the maximum variance ratio threshold method, the motion area of the dribble directional shot is divided. The initial motion coordinates and feature vectors of the dribble directional shooting are calculated, and the characteristic affine transformation equation of the shooting action pixel information is constructed. The Camshift method is used to mark the trajectory contour of the dribble directional shooting. According to the result of the contour extraction, the gray pixel value feature points of the video sequence are fitted, and the trajectory tracking model of the dribble directional shooting is established to accurately track the trajectory of the dribble directional shooting. It is verified that the trajectory of the dribble directional shooting tracked by the proposed method is consistent with the actual situation, and the tracking error average is about 1.9%, that is the reliable trajectory tracking method of dribble directional shooting.










Similar content being viewed by others

Data Availability
There is no data file included in this work.
References
Yang, Y. L., & Miao, Z. (2015). Predictive control strategy based on extreme learning machine for path-tracking of autonomous mobile robot. Intelligent Automation & Soft Computing, 21, 1–19.
Zuo, Z., & Mallikarjunan, S. (2017). Adaptive backstepping for robust trajectory tracking of UAVs. IEEE Transactions on Industrial Electronics, 64, 2944–2954.
Wei, S. H., Jiao, L. H., Li, Q., Liu, J. C., Yang, J. X., & Zhang, L. (2017). Assistant decision-making system of maritime search and rescue based on high-frequency surface wave radar. Journal of China Academy of Electronics and Information Technology, 12, 540–545.
Kamalapurkar, R., Dinh, H., & Bhasin, S. (2015). Approximate optimal trajectory tracking for continuous time nonlinear systems. Automatica, 51, 40–48.
Zhou, Z. J., Ma, J., Zhou, W., & Pei, X. J. (2017). Conducted common-mode emi model based on two-port network for three-phase inverter. Journal of power supply, 15, 1–8.
Karelahti, J., Ka, V., & Raivio, T. (2015). Near-optimal missile avoidance trajectories via receding horizon control. Journal of Guidance Control & Dynamics, 30, 1287–1298.
Peng, L., Xie, L., & Han, J. (2017). New decentralized control scheme for a dynamic voltage restorer based on the elliptical trajectory compensation. IEEE Transactions on Industrial Electronics, 64, 1–1.
Raman, G. (2015). Using controlled unsteady fluid mass addition. Aiaa Journal, 35, 647–656.
Li, Y. M., Chai, H., Zhang, H., Xiao, J., & Wang, C. H. Y. (2016). High efficiency mobile power solution with power path management. Chinese Journal of Power Sources, 40, 1851–1853.
Shi, X. N., Zhang, Y. A., & Zhou, D. (2015). A geometric approach for quadrotor trajectory tracking control. International Journal of Control, 88, 2217–2227.
Casau, P., Sanfelice, R. G., & Cunha, R. (2015). Robust global trajectory tracking for a class of underactuated vehicles. Automatica, 58, 90–98.
Corapsiz, M. F., & Erenturk, K. (2016). Trajectory tracking control and contouring performance of three-dimensional CNC. IEEE Transactions on Industrial Electronics, 63, 2212–2220.
Zou, Y. (2016). Adaptive trajectory tracking control approach for a model-scaled helicopter. Nonlinear Dynamics, 83, 2171–2181.
Huda, M. N., & Yu, H. (2015). Trajectory tracking control of an underactuated capsubot. Autonomous Robots., 39, 1–16.
Yu, X., Liu, Y. 2016. Based on the SVM of eye movement trajectory risk decision rule. Automation & Instrumentation 199–201.
Chen, J., Ren, B., & Zhong, Q. C. (2016). UDE-based trajectory tracking control of piezoelectric stages. IEEE Transactions on Industrial Electronics, 63, 6450–6459.
Yu, H. X., & Duan, J. M. (2015). Simulation of road lane detecting and trajectory planning. Computer Simulation, 32, 144–148.
Asl, H. J., & Yoon, J. (2017). Robust trajectory tracking control of cable-driven parallel robots. Nonlinear Dynamics, 89, 2769–2784.
Lefebvre, D., & Leclercq, E. (2015). Control design for trajectory tracking with untimed petri nets. IEEE Transactions on Automatic Control, 60, 1921–1926.
Ye, L., Cong, W., & Qi, W. (2015). Study of 3 dimension trajectory tracking of underactuated autonomous underwater vehicle. Ocean Engineering, 105, 270–274.
Madhumitha Ramamurthy, Y., Harold Robinson, S., & Vimal, and A. Suresh, . (2020). Auto encoder based dimensionality reduction and classification using convolutional neural networks for hyperspectral images. Microprocessors and Microsystems, 79, 103280.
Ramamurthy M., Krishnamurthi I., Vimal S., Annamalai S. (2020). Analysis of obstructive sleep apnea disorder with accuracy prediction using svm for smart environment. ACM Transactions on Multimedia Computing, Communications, and Applications
Funding
There is no any funding source for this work.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
There is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ma, M., Han, Z. Symmetric Algorithm for Direction Tracking of Dribble Directional Shooting. Wireless Pers Commun 127, 125–140 (2022). https://doi.org/10.1007/s11277-021-08096-w
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11277-021-08096-w