
Abstract
Real-time traffic prediction uses past data to anticipate traffic volume. The volume of traffic in the region may be estimated using interpolation and extrapolation from library data by the trend structure. It is based on a prediction model with a linear function. From this, the distance-relevant procedures are used to conduct the vehicle traffic flow system. To improve forecast accuracy for managing traffic flow and representing the traffic pattern in the trip route, an adaptive model of optimum learning was presented for missing traffic flow predictions. To categorize and forecast the traffic flow from the database for this model, Adaptive Wildfire Optimization (AWO) with the AI method is suggested. It chooses the best features from the database's overall properties to outperform the conventional classification model in making predictions. Spatial Pattern Super Learning (SPSL), a paradigm for enhancing pattern learning, is presented to increase learning accuracy. By comparing the suggested model's overall outcomes with those of other cutting-edge techniques using statistical factors, the findings may be confirmed.
Similar content being viewed by others


1 Introduction
Due to an increase in car use, traffic is getting heavier. Several programs can predict the best traffic flow pattern for the vehicle [1]. Based on traffic history data, machine learning algorithms execute the forecast process. Since the traffic flow is out of range owing to several issues with tracking the traffic range. It causes misclassification in the vehicle routing system and the traffic forecast system. To get around this, the traffic flow prediction is followed by referencing past data's relevance. Figure 1 depicts the Multi-Objective Traffic Flow model's fundamental composition.

Architecture of multi-objective traffic flow prediction
The traffic flow model's design is divided into three steps in this diagram: vehicle allocation, choosing a vehicle count, and end-user of vehicle nodes. For this, several forecasting techniques based on the historical traffic data for each moment of time samples are available. The traffic volume is anticipated based on the linearity of each data sample, and crops are grown, or irrigation patterns are followed. The forecasting outcome is projected with a rise in error rate based on the linearity of data samples. An improved model of feature prediction and classification system [2] must be used to examine historical data for that area and forecast the pertinent parameter values to increase the prediction rate.
The optimum attributes can be chosen using an optimization method [3] to improve the prediction model and the feature analysis of the texture pattern from the input properties of weight and traffic data samples. The weight and the traffic data samples are utilized in the traffic flow data classification process to determine the sort of traffic level that increases in that environment to forecast its growth level. The forecasting of atmospheric conditions [4] most frequently entails training a larger number of data samples to get the greatest classification performance and increase prediction accuracy. The classification model's duration and spatial complexity are increased by this type of training component. It can be avoided using the texture pattern-based data categorization strategy with the best feature selection.
Considering the list of objectives that are focused on in this paperwork is
-
To build a unique texture pattern extraction approach based on Ensemble Modulation Patterns (EMP) to describe the characteristics of input data samples.
-
To optimize the feature properties pertinent to the texture data to improve classification performance.
-
To verify the weight and traffic types of feature characteristics for anticipate and forecasting the range of traffic flow cultivation depends on the atmospheric condition.
-
Utilizing a classifier called a Block Probability Neural Network (BPNN) to accomplish the texture classification technique.
Depending on the statistical parameters and the comparison result, assess the effectiveness of the suggested classification model.
The following sections are used to arrange all of the paperwork. To determine the optimal choice of traffic flow path, Sect. 2 of that document examines several optimization techniques for the Traffic Flow model. Section 3 describes the SPSL with AWO optimization algorithm working model for vehicle design traffic flow channel selection. The simulation graph charts are used to validate the proposed model's outcomes and Sect. 4's explanation of the comparative findings. Section 5 discusses the paper's conclusion and planned enhancements.
2 Related work
This section covers Traffic Flow model approaches and the difficulties of choosing the optimum path using optimization concepts. This section thoroughly analyses current data forecasting and traffic flow prediction methods. All of them are primarily focused on the workflow-required feature extraction, optimization, and categorization of data samples. They looked at the attributes of soil level and irrigation conditions depending on atmospheric changes and the traffic flow pattern forecast.
Considering this, [5] reported the research on the Azolla (Azolla filiculoides) compost technique to increase grain output by reducing the stress caused by a water shortage for the Traffic Flow crop. It separates the soil's texture and irrigated area by it. Like this, [6] evaluated the frequency of water requirements due to climate change based on the atmospheric meteorological state and forecastes the water supply. To verify the effectiveness of Traffic Flow agriculture, this is tested in Bangladesh's agricultural region. Traffic Flow's planting date was computed in [7] utilizing time chart data samples and series. In the basin-scale traffic level planting model, MODIS data samples are used for production analysis.
It also refers to the weather forecast based on historical data and climate change. A timeline for irrigation is also projected in [8]. In this study, the scheduled time for irrigation is predicted using data from short-term weather forecasting models. Based on previous weather data samples and soil moisture characteristics, this was in operation. In addition to the characteristics of soil moisture, additional techniques for estimating the moisture level in that area of interest use satellite data. Based on this knowledge, [9] suggested a soil moisture retrieval model that used C-band SAR satellite data to forecast the terrain.
It compares the classification performance based on statistical characteristics and studies several classification models to predict soil moisture using satellite data [10]. It calculates the level that influences the geochemical fractions and other relevant parameters in the contaminated soil to validate the effect of traffic-level straw- and rapeseed residue-derived biochars. Based on the factors of atmospheric state, they are all projected for the various soil moisture conditions. Like that, [11] suggested a pH level prediction model for the Traffic Flow soil based on floods and moisture content drainage circumstances. It forecasts the condition of soil following floods when the pH range increases from >6.5 to a maximum of 7. This assessment improves the Traffic Flow cultivation on the proper soil. To offer information about irrigation level, [12] suggested the prediction model of water logging in the Traffic Flow field. It calculates the quantity of water delivery and other relevant elements based on the water level for improving field traffic flow. [13] suggested a K-means clustering method to get the best path using a route optimization technique which uses multiple cases for 100 customers. It involved keeping track of the weed crop's growth rate and identifying it based on a graphical depiction of a convolution network that estimates the growth and conditions of the traffic flow.
Numerous additional techniques are enhancing the cultivation range and other choice plans from the prediction procedure of soil factors and the forecasting data. From this, [14] suggested fuzzy logic-based decision assistance for assessing the quality of the traffic flow. It validates the food range for public distribution by classifying the traffic level kept in the food that goes down according to quality. The fuzzy interference system assesses the quality of the traffic and divides it into various segments. A geographic variation estimating method in traffic flow cultivated land was developed in [15]. It forecasts the pH of the grain fillings at the traffic level. Additionally, this calculates the state of soil redox to forecast the kind of traffic flow that can flourish in that soil. [16] converts double-season traffic levels to ratoon Traffic Flow fields to save carbon emissions and boost environmental benefits. It will result in a higher yearly yield and lower labor and fertilizer costs thanks to the Ratoon Traffic Level (RR) system. It was examined using many data points in the overall study with the crop cultivation analysis report.
The pH level and other dangerous gas emission effects are estimated using various techniques to protect the environment. Considering this, [17] suggested a conversion model of winter-flooded Traffic Flow planting to traffic level-wheat rotation. Due to high emissions during planting seasons with high traffic levels, this method of wheat planting alters the level of methane emissions. The focus of [18] is the Genetic algorithm with ACO method route optimization for finding the nearest path. To make the best choice for protecting the crop, the illness harming the Traffic Flow crop is anticipated based on weather changes and provides the report of Traffic Flow level. According to the author's suggestion in [19], an intelligent irrigation system should be used to produce crops based on predictions of soil moisture content and crop weight made using sensor characteristics. Based on this, [20] presented a traffic level Traffic Flow distribution forecast. Using the combination of deep learning with phonological properties, this was calculated and forecasted. To safeguard the Traffic Flow crop, the author of [21] presented research on various Traffic Flow disease classification models. The author suggested a method for classifier, which helps to feature matrix and another optimization method, which helps to optimize block separation [22].
A comprehensive literature survey presents the drawbacks that most of the traffic flow crop algorithms are unable to handle abnormal conditions such as inconsistent data, missing data and information lost.
From this discussion, the suggested model's texture-based soil range prediction is centered on soil moisture, atmospheric weight, and other relevant characteristics and parameters. The neural network approach found and projected traffic flow that may thrive in such soil conditions, validating the model.
3 Proposed methodology
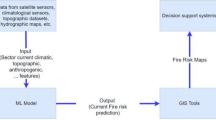
The suggested Traffic Flow model's general process is described in this section. The proposed model traffic flow model's general design is shown in Fig. 2. This section explains the suggested model of weight and moisture properties based on atmospheric factors.

Overall flow of the proposed system
This work aims to improve projected recognition accuracy using feature-based data representation. Adaptive Wildfire Optimization (AWO) and Spatial Pattern Super Learning (SPSL) Algorithm are unique approaches for this aim. The provided testing weight data is first preprocessed using the Block Probability Neural Network (BPNN) approach to normalize the data, improve clustering, and choose the best features. The blocks of the preprocessed data are then divided up to extract the data's patterns, with the EMP pattern being used for extraction. It effectively extracts geometrical information to improve classification accuracy overall. The classifier is then used to determine whether the location ID meets the relevance ratio. The following divisions provide a detailed explanation of the suggested models.
-
A.
Adaptive wildfire optimization (AWO),
-
B.
Spatial pattern super learning (SPSL) algorithm.
3.1 Adaptive wildfire optimization (AWO)
The AWO optimization algorithm model was designed to improve multi-objective prediction. The AWO algorithm's particles were initiated by random weight update formation in such cases. The input was chosen, and the first route was produced to create the root path based on the vehicle coordinate location. The Feature Pattern approach is used to evaluate particle parameter updates utilizing population size and reproduction rate, which are linked to vehicle capacity.
Algorithm 1 explained the multi-objective AWO algorithm's steps and equation model.

Multi-objective AWO algorithm
Here is the dataset size for N number of attributes, which has the database model of RN. The overall dataset size is measured as M. Ki, and Kj are the matrix representing the relevancy key prediction between feature attributes. Then, the particle parameters of Ki and Kj are represented as \(wd_{x} , wd_{y}\) and \(wd_{xy}\). Similarly, the binary representation of these particles is calculated as \(M_{xy}\), \(N_{xy}\) and \(N_{yx}\) as shown in below equations:
Then, the distance \(dist_{xy}\) is computed by the ratio of \(\frac{1}{{log\left( { Derv_{xy} } \right)}}\) and \(dif_{v}\). Consequently, the \(T_{dist}\) is updated with the sum of \(T_{dist}\) and \(dist_{xy}\).
Then, the value of \(O_{dist}\) is updated with the values of \(T_{dist}\), and finally, the \(M_{NID}\)(i, j)is estimated based on the updated \(O_{dist} /M\).
From this parameter validation, the best traffic flow path was selected in the traffic flow architecture, and it was ready for data transmission with enhanced speed of operation.
3.2 Spatial pattern super learning (SPSL) algorithm
SPSL starts with predicting the link difference between model-initialized nodes. Distance between connections is used to estimate multi-objective validation parameters. The vehicle's ability to interact with the design to reduce connection coverage distance is estimated. The optimization algorithm's goal function. Forecasting the best architectural connection information is this algorithm's main contribution. The instance's data matrix was input at each optimization iteration. Since the traffic flow path's ideal decision was always made, the data matrix was updated.
In Algorithm 2, the SPSL model equation model and algorithm stages were given.

SPSL Algorithm
In addition to emphasizing the improvements in our work, we understand the necessity of addressing potential limitations and drawbacks of the proposed approaches. This work is specifically applicable in plain areas with missing data. In future this work can be applied to hilly areas and zig-zag areas. For future approaches, behavioral analysis and user experience can be incorporated to improve the overall privacy concerns of the passengers and considerable modification can also be done to use it in smart cities.
4 Results and discussion
The suggested model's output for classifying traffic flow based on weight and moisture factors is evaluated and contrasted with current approaches. The statistical characteristics of the proposed texture-based classification model, provided in the table results and graph plot, were utilized to evaluate its performance. It was put into practice and examined in MATLAB/SIMULINK R2016b. It was verified using the currently available techniques on the traffic administration database dataset mentioned in the study [23]. The traffic database weight data is adjusted to have a missing value to predict and forecast data. The following subsections discuss performance results.
4.1 Performance indicators
The statistical likelihood between the samples of data that are properly categorized and the number of misclassification results may be utilized to produce the parameters that are used for the performance metric-based analytical procedure. These are all derived from the layout of the confusion matrix and assessed by contrasting the categorized result with the dataset's ground truth.
where \(P_{e}\) hypothetical probability and the \(P_{o}\) probability of relative observation.
The accuracy, precision and recall values of the existing method IVIBE and proposed AWO-SPSL technique is presented in Table 1 and Fig. 3. This evaluation results indicate that the accuracy, precision and recall performance of the proposed AWO- SPSL technique is extremely better as compared to other techniques.

Precision and recall of the existing and proposed techniques
Similar values may be found for the current MYOLOv3, IVIBE, DETRAC, KITTI [24], and planned AWO-SPSL methods. These values are visually depicted in Fig. 4 and summarized in Table 2, respectively. The proposed AWO-SPSL strategies produce better outcomes than the other techniques, according to this performance analysis.

Analysis of accuracy, precision, and recall
The AWO-SPSL approach successfully extracted the texture patterns from the input image to categorize the outcomes. The hybrid AWO-SPSL algorithm is proposed to remove the inadequacies of previously established models such as MYOLOv3, IVIBE, DETRAC and KITTI. The proposed method has an accuracy of 99.1%, whereas MYOLOv3 accuracy is 98.9%, IVIBE accuracy is 97.6%, DETRAC accuracy is 94.1% and KITTI accuracy is 92.2%. Similarly, the proposed method has a precision of 0.91, whereas MYOLOv3 precision is 0.88, IVIBE precision is 0.82, DETRAC precision is 0.82, and KITTI precision is 0.76. Finally, the proposed method has a recall of 0.81, whereas MYOLOv3 recall is 0.78, IVIBE recall is 0.76, DETRAC recall is 0.69, and KITTI recall is 0.74. These parameters precision, recall and accuracy has already been defined in Eqs. (9), (10) and (13).
The accuracy and recall values of the present image stacking approach, TMTRAG, Rosenbaum KLT with K-means [25], and suggested AWO-SPSL methodologies are also contrasted in Table 3 and Fig. 5. These assessment findings show that the suggested AWO-SPSL, which extracts texture characteristics using differential patterns, outperforms the other approaches.

Precision and recall measures
The tracking performance, accuracy, and recall values of the proposed AWO-SPSL approaches, the conventional KLT tracker, temporal consistency, and KLT with k-means are compared in Fig. 6 and Table 4. According to the evaluation's findings, the suggested AWO-SPSL tracking performance might be significantly better than other ways.

Analysis of precision, recall and tracking performance
The tracking performance rates for the present KLT tracker, KLT with K-means, and suggested AWO-SPSL approaches are shown in Table 5 and Fig. 7. According to the evaluation, the suggested AWO-SPSL delivers effective outcomes compared to the other methodologies. Picture attributes greatly affect detecting method tracking performance. In this study, the moving vehicle can be precisely recognized using the AWO approach, and the texture patterns have been effectively extracted using SPSL.

Precision, recall and tracking performance rate of existing and proposed techniques
5 Conclusion
A novel traffic flow prediction model has been proposed based on an adaptive technique of Adaptive Wildfire Optimization (AWO) for optimal pattern-based route selection and Spatial Pattern Super Learning (SPSL) for predicting traffic flow. This work predicts traffic flow using past data patterns and missing data. Compared to the line intersection function to find the traffic flow, the AWO optimally selects the routing path by the pattern of traffic level. Due to spatial features in the pattern analysis, SPSL performs a better than existing algorithms. The outcome analysis and comparison analysis illustrate the proposed traffic flow prediction model's performance. It shows the planned work is more accurate than state-of-the-art methods.
In future, this type of pattern-based prediction model can be implemented and tested for the big data in the traffic pattern based on the enhancement in the feature optimization model.
Data availability
My manuscript has no associated data.
Change history
02 March 2024
A Correction to this paper has been published: https://doi.org/10.1007/s11276-024-03710-8
References
Tian, Y., et al. (2018). LSTM-based traffic flow prediction with missing data. Neurocomputing, 318, 297–305.
Wu, Y., et al. (2018). A hybrid deep learning based traffic flow prediction method and its understanding. Transp Res Part C: Emerging Technol, 90, 166–180.
Feng, X., et al. (2018). Adaptive multi-kernel SVM with spatial–temporal correlation for short-term traffic flow prediction. IEEE Transactions on Intelligent Transportation Systems, 20(6), 2001–2013.
Ryu, U., et al. (2018). Construction of traffic state vector using mutual information for short-term traffic flow prediction. Transp Res Part C: Emerging Technol, 96, 55–71.
Pamuła, T. (2018). Impact of data loss for prediction of traffic flow on an urban road using neural networks. IEEE Transactions on Intelligent Transportation Systems, 20(3), 1000–1009.
Miglani, A., & Kumar, N. (2019). Deep learning models for traffic flow prediction in autonomous vehicles: a review, solutions, and challenges. Veh Commun, 20, 100184.
Zhao, L., et al. (2019). Parallel computing method of deep belief networks and its application to traffic flow prediction. Knowledge-Based Systems, 163, 972–987.
Zhao, F., Zeng, G.-Q., & Kang-Di, Lu. (2019). EnLSTM-WPEO: Short-term traffic flow prediction by ensemble LSTM, NNCT weight integration, and population extremal optimization. IEEE Transactions on Vehicular Technology, 69(1), 101–113.
Deng, S., Jia, S., & Chen, J. (2019). Exploring spatial–temporal relations via deep convolutional neural networks for traffic flow prediction with incomplete data. Applied Soft Computing, 78, 712–721.
Sun, P., Aljeri, N., & Boukerche, A. (2020). Machine learning-based models for real-time traffic flow prediction in vehicular networks. IEEE Network, 34(3), 178–185.
Shahriari, S., et al. (2020). Ensemble of ARIMA: combining parametric and bootstrapping technique for traffic flow prediction. Transportmetr A: Transp Sci, 16(3), 1552–1573.
Tian, Z. (2020). Approach for short-term traffic flow prediction based on empirical mode decomposition and combination model fusion. IEEE Transactions on Intelligent Transportation Systems, 22(9), 5566–5576.
Revanna, J. K., & Al-Nakash, N. Y. (2022). Vehicle routing problem with time window constrain using kmeans clustering to obtain the closest customer. Glob J Comput Sci Technol, 22(1D), 25–37.
Chen, X., et al. (2021). Traffic flow prediction by an ensemble framework with data denoising and deep learning model. Phys. A: Stat. Mech. Appl., 565, 125574.
Ali, A., Zhu, Y., & Zakarya, M. (2021). Exploiting dynamic spatio-temporal correlations for citywide traffic flow prediction using attention based neural networks. Information Sciences, 577, 852–870.
Vijayalakshmi, B., et al. (2021). An attention-based deep learning model for traffic flow prediction using spatiotemporal features towards sustainable smart city. International Journal of Communication Systems, 34(3), e4609.
Chen, Q., Song, Y., & Zhao, J. (2021). Short-term traffic flow prediction based on improved wavelet neural network. Neural Computing and Applications, 33(14), 8181.
Revanna JK, Veerabhadrappa R (2022) Analysis of optimal design model in vehicle routing problem based on hybrid optimization algorithm. In: IEEE 4th international conference on advances in computing, communication control and networking (ICAC3N -2022)
Liang M, et al. (2022) Fine-grained vessel traffic flow prediction with a spatio-temporal multigraph convolutional network. IEEE Trans Intell Transp Syst
Tang, J., & Zeng, J. (2022). Spatiotemporal gated graph attention network for urban traffic flow prediction based on license plate recognition data. Comput-Aided Civ Infrastruct Eng, 37(1), 3–23.
Chen, Y., & Chen, X. M. (2022). A novel reinforced dynamic graph convolutional network model with data imputation for network-wide traffic flow prediction. Transp Res Part C: Emerging Technol, 143, 103820.
Jain, R., et al. (2022). An improved traffic flow forecasting based control logic using parametrical doped learning and truncated dual flow optimization model. Wirel Netw, 28(7), 3101–3110.
Ryu, U., et al. (2022). A clustering based traffic flow prediction method with dynamic spatiotemporal correlation analysis. Transportation, 49(3), 951–988.
Farooq, M. U., Saad, M. N., & Khan, S. D. (2022). Motion-shape-based deep learning approach for divergence behavior detection in high-density crowd. The Visual Computer, 38(5), 1553–1577.
Lai Q, et al. (2022) Spatial-temporal attention graph convolution network on edge cloud for traffic flow prediction. IEEE Trans Intell Transp Syst
Funding
No funding has been received for this research work.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The original online version of this article was revised due to error in acceptance date.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jain, R., Dhingra, S., Joshi, K. et al. An adaptive model of optimal traffic flow prediction using adaptive wildfire optimization and spatial pattern super learning. Wireless Netw (2024). https://doi.org/10.1007/s11276-023-03609-w
Accepted:
Published:
DOI: https://doi.org/10.1007/s11276-023-03609-w