
Abstract
In long transmission mains (TMs), maintenance operations and repairs often require the preliminary closure of some of the installed in-line valves. If perfectly sealed, these valves avoid leakage and then the possible emptying of the pipelines, air entry through leaks, and the successive unwanted transients at the filling completion. The poor accessibility of TMs makes the check of the valve sealing quite difficult since in most cases the confined space where they are installed implies the adoption of severe prevention measures. Therefore, expeditious and possibly remote survey procedures are strongly required by pipe system managers. In this paper, an innovative technique based on the execution of safe transient tests is proposed. It is tested on the Dorsale TM – a long, large diameter pipe system – in the northeast of Milan, Italy, where the sealing of three in-line valves had to be checked. The analysis of the test results allows pointing out successfully not only the valves sealing, but also refining a quick and reliable procedure – the so called “diagnostic kit” – that leads the way to automatic and periodic checks of the valve sealing. In the proposed procedure – that can be straightforwardly exported to other TMs – only a single pressure measurement section is required, that significantly simplifies the survey.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Within the ordinary management of transmission mains (TMs) and water distribution networks (WDNs), it is often necessary to close the installed in-line valves for executing maintenance and repair operations. Within any intervention, it is crucial to count on the secure sealing of in-line valves to avoid leakage, and then the possible emptying of the pipelines, air entry through leaks, and the successive unwanted transients at the filling completion. Within optimal management strategies, the status of in-line valves is of great interest, as they could have been inadvertently set as partially/fully closed (Creaco et al. 2010; Do et al. 2018; Liberatore and Sechi 2009).
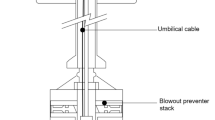
Both in TMs and WDNs, the assessment of the actual opening degree/sealing of in-line valves – particularly in large diameter pipes – is a quite hard task as their possible malfunction has no external evidence. In some cases, due to the lack of documentation, it is even uncertain the effect of a given maneuver. As an example, does the turning of the steering wheel clockwise imply the valve closing or opening? This may happen when valves for gas pipes are installed in water systems and vice versa. Therefore, “is my valve open or closed?” as well as “is it fully closed?” are questions that frequently plague professionals with negative consequences from the management point of view. Moreover, for TMs, pipe burying may be some meters and then the sealing check may imply the complex procedure required in confined spaces where any operation is quite hard for the lack of space and safety standards prescribed by law (Fig. 1). Accordingly, any reliable, but cheap, procedure facilitating an accurate sealing checking of the in-line valves is very welcome.

A fall-arrest and rescue system for emergency retrieval, in a confined space, as prescribed by law in Italy
In this contex, an innovative procedure is proposed in this paper, based on the properties of the pressure waves – the so-called Transient Test-Based Technique (TTBT) or time domain reflectometry (e.g., Ayati et al. 2019; Che et al. 2021). In the last two decades, TTBTs have been successfully used for detecting anomalies – e.g., leaks (Beck et al. 2005; Haghighi et al. 2012), partial blockages (Contractor 1965; Mohapatra et al. 2006; Tuck et al. 2013), inadvertently partially closed in-line valves (Meniconi et al. 2011), illegal branches, and pipe wall deterioration (Gong et al. 2017) – not only in laboratory but also in real systems (Brunone et al. 2022, 2023).
Within TTBTs, an artificially created pressure wave travels throughout the pipeline and reflects from the mentioned anomalies as well as boundaries (e.g., reservoirs, and dead ends). On the contrary, the remaining part of the incoming pressure waves (i.e., the transmitted wave) propagates beyond the anomaly. The information content of the reflected (transmitted) pressure wave is incredibly high. The shape allows identifying the type: a leak (a partially closed in-line valve) gives rise to a negative (positive) reflected pressure wave whereas a partial blockage generates a bell-shaped pressure wave, with the elongation proportional to the length of the partial blockage (Brunone et al. 2008; Meniconi et al. 2016). At a constant level reservoir, the arriving pressure wave is entirely reflected with sign reversal whereas at a dead end the pressure change is double with respect to the wave passes (Swaffield and Boldy 1993). Given the pipe wave speed, the time interval between the generation of the pressure wave and the return of the reflected pressure wave allows locating the anomaly/boundary, whereas the entity of the reflected pressure wave depends on its characteristics.
The case of the sealing checking is even clearer than the detection of the status of a partially closed in-line valve. Precisely, if the in-line valve is fully closed, the reflected pressure wave is equal to the generated pressure wave as well as the transmitted one is null. In other words, if the pressure signal is monitored on the pipe system side where the pressure wave is generated, a reflected pressure wave equal to the generated one indicates that the valve is fully closed. Alternatively, or in addition, if the pressure signal is monitored from the opposite side of the pipe system where the pressure wave is generated, a transmitted pressure wave equal to zero implies that the valve sealing is guaranteed.
What has been said holds true in theory, whereas practice has problems, some of which may risk invalidating the procedure or even cause it to fail. Until now, the main problem that prevents TTBTs from being largely used in real pipe systems is how to generate a small-amplitude pressure wave (e.g., Kim 2019; Yazdi et al. 2019; Bostan et al. 2019). With this aim, in this paper the Portable Pressure Wave Maker (PPWM), a device refined at the Water Engineering Laboratory (WEL) of the University of Perugia, Italy (Brunone et al. 2021) and evaluated in both laboratory (Meniconi et al. 2010) and real pipe systems (Meniconi et al. 2021), is used. The principle of operation of the PPWM is simple: set the pressure inside the PPWM larger than the one in the pipe, the quick opening of the small connection valve, installed at the end section of the short conduit linking the device and the test pipe, generates a pressure wave. The devices proposed in Taghvaei et al. (2010) and Gong et al. (2017), the fast closure of a small-diameter side discharge valve (Stephens et al. 2011), the pump shut-down in rising mains (Meniconi et al. 2021), and pipe sonar (Lee et al. 2017) are alternatives to the PPWM.
This paper is organized as follows. In the successive section, the test pipe and the experimental procedure are described. Then, the analysis of the acquired pressure signals is offered. Successively, the refinement of the proposed procedure for the assessment of in-line valve sealing is reported and conclusions are drawn.
2 The Dorsale Transmission Main and Field Test Procedure
The Dorsale TM plays a key role in supplying water to several municipalities managed by CAP Holding SpA in the northeast of Milan, Italy (Fig. 2). It connects the well-field in Pozzuolo Martesana (WF) to the rising main (RM) located between Bellusco and Ornago. It mainly consists of three in-series cast iron pipes with the nominal diameter, DN, decreasing in the flow direction: DN800, with a length L800 = 11,666 m, DN700, with L700 = 2572 m, and DN600, with L600 = 1354 m. Along the TM route, there are a closed stub and seven active branches (indicated with the letter “I” and a number) – of different diameters and materials – supplying municipality WDNs, a piezometric tower (PT) and a reservoir (R). Each branch is equipped with a shut-off valve located at a distance Lb from the Dorsale TM (Table 1). Three in-line shut-off valves, V1, V2 and V3 – with the same DN of the respective pipe – are installed along the Dorsale TM at s = 7570 m, 11,677 m, and 14,278 m (Table 1), respectively, with s being the distance between each valve and the WF.

The Dorsale TM sketch, where WF and RM indicate the well-field and the rising main, respectively; V1, V2 and V3 are the in-line valves to be checked, and I indicates the active branches. Due to the very different lengths and diameters of the pipes, the layout is not in scale; however, to distinguish main pipes from branches, line thickness has been selected proportionally to the pipe diameter
As mentioned, transient tests have been generated by means of the Portable Pressure Wave Maker (PPWM), installed at section RM, hereafter referred to as the “insertion section”. As a connection valve, a 3/4” pneumatic valve is used. Because of the very short duration of the opening maneuver (= 50 ms) of this valve, a sharp pressure wave is generated by the PPWM.
The test procedure for checking the in-line valve sealing is divided into three phases.
The first phase addresses four preliminary but crucial issues: (i) the choice of the measurement sections and sensor characteristics, (ii) disconnection of branches and users, (iii) installation and check of the measurement equipment, and (iv) analysis of the pre-transient flow conditions in the test pipe. The first issue is addressed on the basis of the accessibility of the test pipe. This is the “sore note” of TMs: their poor accessibility, i.e., the very small number of access points, has been already pointed out. Such a feature significantly restricts the choice and, at least in the first place, measurement sections are usually located at reservoirs, well-fields, and pumping stations. Accordingly, the measurement sections have been arranged at WF and RM. Pressure signals have been measured by means of piezoresistive pressure transducer with a full scale, fs, variable from 3.5 bar G to 16 bar A and accuracy of 0.25% fs; the elevation of the installed sensors, z, is 125.50 m a.s.l. and 195.58 m a.s.l. at WF and RM, respectively. During tests, pressure is sampled at a frequency fa = 2048 Hz by a National Instrument cDAQ-9188 data acquisition system, provided with a GPS antenna for data synchronization. The second issue prevents the interaction of the inserted pressure waves with branches and users. In fact, in case branches and users are left open, two negative effects would occur. Firstly, they would give rise to reflected pressures waves that significantly complicate the analysis of the acquired pressure signals. Secondly, in the first phase of the transients they reduce the magnitude of the pressure wave proceeding along the test pipe. This weakens the potential of the fault detection procedure: the smaller the incoming pressure wave the smaller the reflected one and then the larger the minimum detectable anomaly. Accordingly, the branches have been disconnected by closing the respective shut-off valve. The third issue allows verifying the proper operation of the installed equipment. The fourth issue aims at evaluating the pre-transient flow condition to start the tests when the effects of the abovementioned maneuvers executed to disconnect the branches are negligible in terms of pressure variations. In fact, it is evident that the persistence of the effects of the transients caused by the exclusion of the branches would interfere with the pressure waves inserted for fault detection. To fulfill such a task, the closing maneuvers at branches/users have been executed as slowly as possible. Meanwhile, to keep pressure at a small value and then maximize the reflected pressure waves (Liou 1998; Ferrante et al. 2014), pumps at RM have been shut down whereas only one pump at WF has been kept running to ensure the pressurization of the TM in the case there were leaks. The time interval, Tw, needed to significantly reduce the pressure changes is quite difficult to predict. It depends mainly on the characteristics of the test pipe, pre-transient conditions, and duration of the preliminary maneuvers. In most cases, Tw is obliged by external needs, and limited, as an example, by the volume of the reservoirs supplying the users disconnected by the TM. In the executed survey, it resulted Tw = 75 min, when the pressure variations at RM and WF were of the order of few centimeters.
The second phase includes the execution of the transient tests. Each test is preceded by the pressurization of the PPWM by means of an air compressor. The time interval between two tests has been dictated by the need of re-establishing conditions as steady as possible, as discussed above. During tests, four configurations of the TM have been considered and for each of them, two tests have been executed to check their repeatability (Table 2). The first series of tests (i.e., tests #0a and #0b) has been executed on the entire Dorsale TM. Successively, tests #1a and #1b have been carried out on the test pipe V1-RM, with V1 fully closed (second series). The third series of tests (i.e., tests #2a and #2b) has concerned the test pipe V2-RM, with V1 and V3 open. Finally, in the fourth series of tests (i.e., tests #3a and #3b), V2 and V3 have been closed to examine the V3-RM pipe, with V1 open.
In the third phase, the acquired pressure signals (i.e., the pressure time-history at the measurement sections) are analyzed for checking the sealing of the in-line valves.
3 The Analysis of the Pressure Signal
This section includes two subsections. In the first subsection, the repeatability of the transient tests is verified whereas in the second one, the main features of the acquired pressure signals are identified.
3.1 Check of the Repeatability of the Transient Tests
The pressure signals acquired during tests #0a and #0b are compared in Fig. 3. They are shown in terms of the pressure variation, ∆H = H − H0 – with the subscript 0 indicating the pre-transient conditions – to emphasize the transient response of the test pipe. This even in the light of the small entity of the pressure waves generated by the PPWM at RM that ranges between about 2.4 and 2.5 m of water column.

Transient tests #0a and #0b. Pressure variation, ΔH, acquired at the measurement section: a) RM, and b) WF (the remote-control data acquired at WF are also reported)
At both measurement sections, no clear difference can be noticed between the two pressure signals. Moreover, as for surveys in other pipe systems (e.g., Meniconi et al. 2021), the short duration of the transient tests, and the small entity of the pressure waves generated by the PPWM allow repeating tests after a quite short time interval (i.e., about 13 min). Such a short time lapse reduces possible changes in the boundary conditions and makes tests repeatable, for a given procedure.
During transient tests, the CAP Holding SpA remote control system has acquired, as usual, pressure at WF. As it happens in most cases, such a system has been designed for monitoring the steady-state conditions. As a consequence, fa is small (e.g., 1 sample every 5 min) and the fs of the probes is large. This implies that the fast transients, generated by the PPWM, are not captured (Fig. 3b). Therefore, the remote control system of water companies, as the one used by CAP Holding SpA, are not suitable for acquiring the pressure signals, and a dedicated equipment must be used.
3.2 Identification of the Main Singularities in the Pressure Signals
Once the repeatability of the transient tests has been verified, the successive step is identifying the causes of the pressure changes in the pressure signals due to the interaction of the inserted pressure wave with the singularities of the system (e.g., the changes of the diameter, and the in-line valves). With this aim, in Fig. 4 the pressure signals acquired at RM and WF are plotted in the left and right column, respectively, with the second subscript in ∆Hj,# indicating the corresponding test series. For the sake of clarity, in each row, only one of the two tests executed for each configuration is reported. In this plot, what immediately catches the eye is that a small pressure wave has reached the WF measurement section when V2 (test #2, Fig. 4f) and V2 and V3 (test#3, Fig. 4h) – “nominally” fully closed – have been used to section the Dorsale TM. On the contrary, no pressure variation is registered at WF during test #1 (Fig. 4d). Then, the pressure signals indicate that V1 has a good sealing, while the same is not true for V2 and V3, even if they are certified as fully closed by the water company. In fact, in the case of test #3, as an example, a pressure wave of about 2.5 m leaves RM, travels for almost 16 km overtaking several singularities: the almost-fully closed V3 and V2 and the several inactive branches between RM and WF (Meniconi et al. 2018). Finally, it reaches WF with an entity of 0.18 m. Such a decrease of the pressure wave – about 2.32 m that is equal to about the 92.8% – is mainly due to the mentioned interaction with the singularities placed along its route.

Transient tests executed by means of the PPWM for the four considered system configurations. Pressure variation, ΔHj,#, is shown for the measurement sections at RM (a, c, e, and g), and WF (b, d, f, and h), with the subscripts j and # indicating the generic measurement section and the test series, respectively
The above discussion of the results indicates that the proposed procedure for checking the valve sealing is pretty quick and does not require an advanced analysis of the pressure signals. On the contrary, the test-pipe must be isolated as much as possible before executing transient tests with the generation of safe pressure waves. Once such pressure waves are generated, for evaluating the valve sealing, it is enough to check whether they arrive to the other side or not.
However, keeping in mind the mentioned limited accessibility of TMs, it is worthwhile to consider the alternative – and simpler – procedure presented in the next section.
4 An Alternative Approach for Evaluating the Valve Sealing
To overcome the possible difficulty in arranging a second measurement section on the other side of the in-line valves, measurements at a single section – i.e., the one close to the insertion section – can be used successfully. With this aim, the pressure signals of Fig. 4a, c and e, and 4 g are overlapped (Fig. 5a). In these plots, the wave reflection at WF at tWF = 28.6 s is reported, as a useful reference.

Transient tests executed on the Dorsale TM: a) pressure signals acquired at RM for the four considered configurations; and b) enlargement of the experimental pressure signal for test #3, with the indication of the incident pressure wave, F, and pressure variation, ΔHR, acquired at the RM measurement section due to the partial closing of V3
Analyzing the pressure signals of Fig. 5a, it is worth of noting that the four considered configurations have the branch between RM and V3, in common. This implies that the pressure signals are almost indistinguishable up to time tV3 (= 2.34 s) when the pressure wave, generated at RM, reaches V3 and is reflected back. At tV3, the pressure signal ∆HRM,3 deviates from the others, allowing the identification of the pressure wave reflected by V3, actually partially closed during test #3. Moving forward with time, the pressure signals corresponding to the other three configurations overlap as long as the pressure waves explore the part of the Dorsale TM they have in common. In fact, at tV2 (= 7.09 s), ∆HRM,2 deviates from the two other pressure signals, which, in turn, separate from each other at tV1 (= 14.59 s), when the inserted pressure wave reaches the closed V1 and reflects. Accordingly, the instants of time when the pressure signals deviate from the others correspond to the pressure waves reflected at the in-line valves.
A more in-depth analysis can then be carried out by considering the reflection coefficient, CR, defined as the ratio between the pressure wave reflected from an anomaly or boundary, FR, and the incident pressure wave, F. The values of CR for the most common anomalies and boundaries are available in literature (Meniconi et al. 2010; Swaffield and Boldy 1993; Chaudhry 2013). For the sake of brevity, only test #3 is analyzed in detail (Fig. 5b). The clue of the incomplete closure of V3 lies in the fact that, if the pressure wave finds the in-line valve fully closed (i.e., if it behaves as a dead end), it would be reflected with CR equal to 1 (i.e., FR = F). Moreover, as the pressure signal is acquired at RM, that behaves approximately as a dead end, the pressure wave should almost double. Then, the resulting pressure variation should be equal to about 2FR. Accordingly, at tV3, a significant increase of the pressure signal (= 2FR) would be expected. At 2tV3 (= 4.68 s), another pressure increase would occur, since the pressure wave would travel back to the insertion section interacting with another dead end and then back again to V3 where it would be reflected likewise. Therefore, a stepped behavior would be expected, with a time distance between the steps equal to tV3, until the system, which is in connection with the PPWM device, reaches the hydrostatic conditions.
On the contrary (Fig. 5b), ∆HRM,3 shows at tV3 an increase not as large as expected, even considering that the pressure signal is measured at RM. In fact, it is CR = 0.16, since F = 2.51 m, and FR = ∆HR/2 = 0.40 m, with ∆HR being the pressure increase measured at RM.
The relationship between the minor head loss coefficient, χ, of V3 and the reflection coefficient, CR, can be written as (Meniconi et al. 2010):
where δ = valve opening degree (equal to 0 and 1 for fully closed and open valve, respectively), g = acceleration of gravity, and a = pressure wave speed of the pipe RM-V3. Such a quantity can be evaluated by considering that tV3 is the time the pressure wave takes to travel two times – i.e., back and forth – the distance between RM and V3, LV3 (= 1313.5 m). Accordingly, it is a = 2 LV3/tV3 = 1121.30 m/s. Then, Eq. (1) gives the value χ = 46,311, which, considering that, as usual in real pipe systems, the valve characterization is not available, confirms that V3 is not fully closed but it has a very small δ (Idel’chik 2007). Moreover, further signatures of the not perfect sealing of V3 are given by the pressure signal. Firstly, at tDC (= 2.42 s), just after the increase ∆HR (Fig. 5b), there is a sudden decrease, which is compatible with the reflection of the wave at the diameter change (i.e., from DN600 to DN700) located at about 40 m downstream of V3. Secondly, at 2tV3 (= 4.68 s) and 2tDC (= 4.84 s) there are pressure variations corresponding to the second order reflection from V3 and diameter change. Thirdly, there are other pressure waves, reflected by other singularities, that should not appear in the pressure signal if the valve V3 were fully closed. In fact, at tV2 (= 7.09 s), the significant pressure increase can be ascribed to the fact that, during test series #3, valve V2 has been kept in the same status of test series #2 (i.e., “nominally” fully closed, but actually partially closed).
The analysis of ∆HRM,2 leads to analogous results. Briefly, it can be noticed that, since during test #2 V3 is open and then at tV3 no pressure reflection occurs (Fig. 5a), the significant decrease happening just afterwards (i.e., at tCD) is due to the diameter change and is characterized by a larger magnitude with respect to the corresponding reflection in ∆HRM,3. This is due to the fact that, in this case, the incident pressure wave is larger as it has not been reduced by a reflection at V3. Successively, when the pressure wave reaches V2, it reflects, but, again, not as expected, letting suspect that V2, too, is not perfectly sealed (for the sake of brevity, details are not shown here). This is also confirmed, similarly to what has been observed for V3, by the presence of some pressure signal features that can be found also in ∆HRM,1 and ∆HRM,0. Among the most evident features, there are those corresponding to the pressure wave reflections at: (i) tI304 (= 10.73 s), when all the four pressure signals show a rapid decrease followed by an increase, due to the presence of the I304 branch (Fig. 2), and (ii) at tWF, when ∆HRM,3, ∆HRM,2 and ∆HRM,0 show a decrease due to the boundary condition at WF.
It can also be noted that such features are similar in their shape but different in entity. The reason is that the incident pressure wave at the singularities is different. This happens because, as mentioned, even if the wave generated by the PPWM is the same in the four tests, it interacts with different singularities. For ∆HRM,2, as an example, the partially closed in-line V2 partially reflects the pressure wave and so it reaches the next singularities with a smaller entity. The same happens for ∆HRM,3, where the incident pressure waved reduces at V3 and V2 (both partially closed in this test) and, consequently, the successive reflections are even smaller. Moreover, the presence of further anomalies that reduce pressure entity cannot be excluded.
A different behavior with respect to ∆HRM,2 and ∆HRM,3 is exhibited by ∆HRM,1. Such a pressure signal shows at tV1 a large increase, compatible with a total reflection of the incident pressure wave at V1. Afterwards, it does not show similarities with ∆HRM,0, as a proof that the pressure wave does not propagate beyond V1. Precisely, at tWF a pressure increase occurs instead of a decrease as in the other signals, indicating that the pressure wave does not reach WF. As previously pointed out, such an analysis allows assessing the valve sealing using just one pressure signal and therefore there is no need of equipping a second measurement section.
5 The single-section Procedure for the Diagnosis of the in-line Valves
Based on the above results, in this section it is proposed a procedure for the automatic check of in-line valves in TMs by using just one measurement section. This is of a great value for water companies, since, as it is well-known, the accessibility of TMs is often very poor. Such a procedure involves the use of a portable “diagnostic kit” that includes a pressure transducer, a high frequency data-logger, and a device for the generation of transients (e.g., the PPWM). This kit is easy to install since it requires executing two holes in the pipe, when not already available: one for the pressure transducer and one to connect the PPWM to the pipe. The procedure to follow is outlined in Fig. 6.

Outline of the proposed procedure, using the diagnostic kit
First, the kit is installed at the section chosen for the execution of the transient tests and the functioning of the equipment is checked. The preliminary phase includes the preparation of the system, isolating as possible the main pipe – i.e., by excluding branches – and the reduction of the pressure in the pipe, if compatible with operating conditions. Furthermore, it is recommended to monitor the pressure until the pressure variations due to the preliminary maneuvers are negligible.
Once the pressure is stable enough, the transient tests can be carried out. The first transient test involves the whole pipe, to have a benchmark of the transient response of the TM. This allows identifying if the in-line valves are not well sealed. Then, the in-line valves are closed one at a time and a transient test is carried out for each configuration. Once all the configurations have been tested, the system can be brought back to its operating conditions and the analysis of the acquired data can be performed to diagnose the valve sealing, as illustrated in Sect. 4.
6 Conclusion
In this paper, an innovative procedure for checking the in-line valve sealing in long, large diameter transmission mains (TMs) – based on the execution of safe transient tests – is proposed. The procedure is tested on the Dorsale TM, in the northeast of Milan, Italy, managed by CAP Holding SpA, where the sealing of three in-line valves has to be checked. The Portable Pressure Wave Maker (PPWM) device is used for generating safe and fast transients.
The procedure implies the generation, in the first phase, of transients on the whole TM, as a reference. Successively, the in-line valves are closed one at a time and transients are executed on the different parts of the TM delimited by the “nominally” fully closed in-line valves.
In a preliminary assessment of the sealing check procedure, pressure signals acquired at two measurement sections – one upstream and one downstream of the considered in-line valve, respectively – are analyzed. Such a comprehensive set of data allows to straightforwardly verify the status of the in-line valve (i.e., if it is actually fully closed or not).
The obtained results address toward the final arrangement of the procedure in which a single measurement section is used, located where transients are generated by means of the PPWM. Such a result is of great value from the management point of view since the accessibility of TMs is often very poor.
The “diagnostic kit” required for an automatic, periodic, and expeditious survey of in-line valve sealing in TMs through the proposed procedure includes a pressure transducer, a high frequency data-logger, and a device for generating transients.
Data Availability
Field data are available upon request.
Code Availability
Not Applicable
References
Ayati AH, Haghighi A, Lee P (2019) Statistical review of major standpoints in hydraulic transient-based leak detection. J Hydraul Struct 5:1–26
Beck S, Curren M, Sims N, Stanway R (2005) Pipeline network features and leak detection by cross-correlation analysis of reflected waves. J Hydraul Eng 131:715–723
Bostan M, Akhtari AA, Bonakdari H et al (2019) Optimal design for shock damper with genetic algorithm to control water hammer effects in complex water distribution systems. Water Resour Manage 33:1665–1681
Brunone B, Capponi C, Meniconi S (2021) Design criteria and performance analysis of a smart portable device for leak detection in water transmission mains. Measurement 183:109844
Brunone B, Ferrante M, Meniconi S (2008) Discussion of “Detection of partial blockage in single pipelines” by P.K. Mohapatra, M.H. Chaudhry, A.A. Kassem, and J. Moloo. J Hydraul Eng 134:872–874
Brunone B, Maietta F, Capponi C, Duan HF, Meniconi S (2023) Detection of partial blockages in pressurized pipes by transient tests: a review of the physical experiments. Fluids 8:19
Brunone B, Maietta F, Capponi C, Keramat A, Meniconi S (2022) A review of physical experiments for leak detection in water pipes through transient tests for addressing future research. J Hydraul Res 60:894–906
Chaudhry MH (2013) Applied Hydraulic Transients. Springer, New York
Che T-C, Duan H-F, Lee PJ (2021) Transient wave-based methods for anomaly detection in fluid pipes: a review. Mech Syst Signal Process 160:107874
Contractor D (1965) The reflection of waterhammer pressure waves from minor losses. J Basic Eng 445–451
Creaco E, Franchini M, Alvisi S (2010) Optimal placement of isolation valves in water distribution systems based on valve cost and weighted average demand shortfall. Water Resour Manage 24:4317–4338
Do NC, Simpson AR, Deuerlein JW, Piller O (2018) Locating inadvertently partially closed valves in water distribution systems. J Water Resour Plann Manage 144:04018039
Ferrante M, Brunone B, Meniconi S, Karney B, Massari C (2014) Leak size, detectability and test conditions in pressurized pipe systems. Water Resour Manage 28:4583–4598
Gong J, Lambert MF, Nguyen STN, Zecchin AC, Simpson AR (2017) Detecting thinner walled pipe sections using a spark transient pressure wave generator. J Hydraul Eng 144:0601702
Haghighi A, Covas D, Ramos H (2012) Direct backward transient analysis for leak detection in pressurized pipelines: from theory to real application. J Water Supply Res T 61:189–200
Idel’chik IE (2007) In: Ginevskiy AS, Kolesnikov AV (eds) Handbook of hydraulic resistance. Begell House, Inc., UK
Kim S (2019) Valve maneuver prediction in simple and complicated pipeline systems. Water Resour Manage 33:4671–4685
Lee P, Tuck J, Davidson M, May R (2017) Piezoelectric wave generation system for condition assessment of field water pipelines. J Hydraul Res 55:721–730
Liberatore S, Sechi GM (2009) Location and calibration of valves in water distribution networks using a scatter-search meta-heuristic approach. Water Resour Manage 23:1479–1495
Liou C (1998) Pipeline leak detection by impulse response extraction. J Fluids Eng -Trans ASME 120:833–838
Meniconi S, Brunone B, Ferrante M, Capponi C (2016) Mechanism of interaction of pressure waves at a discrete partial blockage. J Fluids Struct 62:33–45
Meniconi S, Brunone B, Ferrante M, Massari C (2010) Small amplitude sharp pressure waves to diagnose pipe systems. Water Resour Manage 25:79–96
Meniconi S, Brunone B, Ferrante M, Massari C (2011) Potential of transient tests to diagnose real supply pipe systems: what can be done with a single extemporary test. J Water Resour Plann Manage 137:238–241
Meniconi S, Brunone B, Frisinghelli M (2018) On the role of minor branches, energy dissipation, and small defects in the transient response of transmission mains. Water 10:187
Meniconi S, Capponi C, Frisinghelli M, Brunone B (2021) Leak detection in a real transmission main through transient tests: deeds and misdeeds.Water Resour. Res.57, e2020WR027838
Mohapatra P, Chaudhry M, Kassem A, Moloo J (2006) Detection of partial blockage in single pipelines. J Hydraul Eng 132:200–206
Stephens ML, Lambert MF, Simpson AR, Vitkovsky JP (2011) Calibrating the water-hammer response of a field pipe network by using a mechanical damping model. J Hydraul Eng 137:1225–1237
Swaffield JA, Boldy AP (1993) Pressure Surge in Pipe and Duct Systems Avebury Technical, UK
Taghvaei M, Beck S, Boxall J (2010) Leak detection in pipes using induced water hammer pulses. Int J of COMADEM 13:19–25
Tuck J, Lee PJ, Davidson M, Ghidaoui MS (2013) Analysis of transient signals in simple pipeline systems with an extended blockage. J Hydraul Res 51:623–633
Yazdi J, Hokmabadi A, JaliliGhazizadeh MR (2019) Optimal size and placement of water hammer protective devices in water conveyance pipelines. Water Resour Manage 33:569–590
Acknowledgements
This research has been executed within a joint project between the Department of Civil and Environmental Engineering of the University of Perugia and CAP Holding SpA, Milan. It has been also supported by the University of Perugia Research Action no. 5 “Climate, Energy, and Mobility”. The support of Mr. C. Del Principe (DICA), Mr. M. Chignola and Mr. F. Montoro of CAP Holding SpA within the field activity is highly appreciated.
Funding
This research has been executed within a joint project between the Department of Civil and Environmental Engineering of the University of Perugia and CAP Holding SpA, Milan.
Open access funding provided by Università degli Studi di Perugia within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Contributions
All authors – C. Capponi, B. Brunone, F. Maietta, and S. Meniconi – contributed to the design and execution of field tests and data analysis. The first draft of the manuscript was written jointly by all authors. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of Interest
The authors have no relevant financial or non-financial interests to disclose.
Ethics Approval
Not Applicable.
Consent to Participate
Not Applicable.
Consent for Publication
Not Applicable.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Capponi, C., Brunone, B., Maietta, F. et al. Hydraulic Diagnostic Kit for the Automatic Expeditious Survey of in-line Valve Sealing in Long, Large Diameter Transmission Mains. Water Resour Manage 37, 1931–1945 (2023). https://doi.org/10.1007/s11269-023-03463-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11269-023-03463-7