
Abstract
O-rings made from foam rubber are often used in sealing applications. Foam rubber have low (macroscopic) elastic modulus \(E_0\) resulting in a low nominal contact pressure when squeezed against a countersurface. In most cases the foam rubber is covered by a thin surface film with the effective elastic modulus \(E_1 > E_0\). We show that the nominal contact pressure may not be high enough for the contact area to percolate and the O-ring seal will leak. For the leakage calculations we use the Persson multiscale contact mechanics theory, and the (modified) Bruggeman effective medium theory for the fluid flow conductivity. The experimental input for the theory are surface roughness power spectrum, which was obtained from stylus topography measurements, and the elastic properties (\(E_0\) and \(E_1\)) of the rubber O-ring. As an application of this calculation method, we have used the preliminary as well as the final results of the laboratory gas tightness tests of the 136 New Small Wheel Micromegas Quadruplets performed at CERN, from February 2019 to May 2021, in the framework of the ATLAS Experiment upgrade. In the integration quality control, a novel method for gas tightness measurement, that we have called “Flow Rate Loss”, has been used as a baseline method.
Graphical Abstract

Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
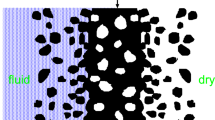
All solid bodies have surface roughness [1, 2]. As a result, when two solid bodies are squeezed together the solids will not make perfect contact in the nominal contact area and the area of real contact A will be smaller than the nominal contact area \(A_0\). Calculations have shown that for surfaces with random roughness, if the relative contact area \(A/A_0>0.42\), the contact area percolate and in this case there is no open channel extending from one side of the contact to the other side [3, 4]. Hence if \(A/A_0>0.42\) no fluid can flow (leak) through the interface.
The leakage of seals depends on the fluid flow at interfaces. It has been shown that a (modified) Bruggeman effective medium theory can be used to calculate accurately the fluid flow conductivity at the interface between elastic solids with random surface roughness [5,6,7]. The “standard” effective medium theory predict that the contact area percolate for \(A/A_0 = 0.5\), but the theory can be modified [3] so that the percolation occur when \(A/A_0=0.42\).
In Ref. [8] one of us has shown that if a rubber O-ring (cross-section radius R) is squeezed against a counter surface with a normal force per unit length F/L large enough to compress the O-ring by \(20-30\%\) then in most cases the seal will not leak. This calculation is based on the assumption that the rubber is homogeneous with the same (elastic) properties close to the surface as further inside.
Sometimes seals are made from layered materials. Thus, for example rubber stoppers in syringes are sometimes covered by thin polymer films (e.g., Teflon) to reduce friction or for other reasons. However, syringes with such stoppers almost always leak, even when the polymer film is only \(\sim 10 \ \mathrm{\mu m}\) thick [9]. This is due to the small nominal contact pressure and the high elastic modulus of the polymer film, resulting in \(A/A_0< 0.42\).
O-rings made from rubber foam compounds have many applications. One advantage of such seals is the low elastic modulus, which imply that the applied squeezing force F can be much smaller than if the seal would be made from the compact rubber, which is important in some applications. However, there are several disadvantages of foam rubber seals:
-
(1)
A rubber seal can only be used if the nominal contact pressure is higher than the fluid pressure. If this is not the case the fluid pressure will separate the surfaces at the interface resulting in catastrophic failure of the seal [10].
-
(2)
If the foam porosity is high and the cell walls in the foam thin, gas (or liquid) could diffuse through the rubber bulk matrix resulting in a finite gas leakage even if the interface is sealing.
-
(3)
The foam seal may be covered by a thin surface film (thickness d) with an elastic modulus \(E_1\) higher than the macroscopic foam elastic modulus \(E_0\). This is expected in most cases since the foam surface usually have a film of compact rubber of similar thickness as for the walls between the cavities (gas bubbles) in the bulk of the foam. If \(E_1 >E_0\) the surface film will reduce the contact area and increase the probability that the seal will leak.
In the present work we will assume that a foam rubber is covered by a thin surface film with the effective elastic modulus \(E_1 > E_0\). We show that the nominal contact pressure is usually not high enough for the contact area to percolate, and the O-ring seal will leak. For the leakage calculations we use the Persson multiscale contact mechanics theory, and the (modified) Bruggeman effective medium theory for the fluid flow conductivity. The experimental input for the theory are the surface roughness power spectrum, which was obtained from stylus topography measurements, and the elastic properties (\(E_0\) and \(E_1\)) of the rubber O-ring. As an application we compare the calculated gas leakage with measurements performed at the CERN ATLAS Micromegas gas detectors.

Optical picture of the surface (a) and cross-section (b) of the foam rubber O-ring. Note the cavities (gas filled bubbles) in b and that there is a thin film (thickness \(d \approx 50 \ \mathrm{\mu m}\)) at the rubber surface consisting of nearly compact rubber. The surface film is assumed to have a Young’s modulus \(E_1>E_0\) larger than the macroscopic modulus \(E_0\) of the foam, and with the Poisson ratio \(\nu _1 \approx 0.5\)

The surface height h(x) for the rubber O-ring along the O-ring axis

The surface roughness power spectra of the rubber O-ring (green and blue lines) and of the FR4 (pink line). The red line is a fit-line to the O-ring power spectrum (Color figure online)

The surface height probability distribution of the rubber O-ring (green line) and of the FR4 surface (pink line) (Color figure online)
2 Surface Roughness Power Spectra
We have studied the surface roughness of the ethylene propylene diene monomer (EPDM) foam rubber O-ring and a FR4 countersurface (FR4 is a composite material composed of woven fiberglass cloth with an epoxy resin binder), used in the study below. The O-ring exhibit the largest roughness which is easily observed with the naked eye (see Fig. 1a for an optical microscopy picture).
For the topography measurements we use the Mitutoyo Portable Surftest SJ-410 with a diamond tip with the radius of curvature \(R=1 \ \mathrm{\mu m}\), and with the tip-substrate repulsive force \(F_N = 0.75 \ \textrm{mN}\). The scan length was varied up to \(25 \ \textrm{mm}\), and the tip speed \(v=50 \ \mathrm{\mu m/s}\). For sliding on very smooth and soft rubber surfaces, adhesion between the tip and the rubber may result in stick–slip-related topography artifacts, as observed in Ref. [11] for a soft PDMS rubber. The rubber O-ring we study has a surface film which is stiffer than the macroscopic modulus of the bulk, and a thickness \(d\approx 50 \ \mathrm{\mu m}\) much larger than the radius of curvature of the diamond tip, and we observe no anomalies in the surface topography line scans (see Fig. 2).
The surface roughness power spectrum can be calculated from the measured height profile \(z=h(\textbf{x})\), where \(\textbf{x}=(x,y)\) is the coordinate in the average surface plane, using [1]
where \(\langle .. \rangle\) stands for ensemble average. For surfaces with isotropic roughness the power spectrum depends only on the magnitude \(q=|\textbf{q}|\) of the wavevector. For surfaces with isotropic roughness the 2D power spectrum C(q) can be obtained directly from the 1D power spectrum \(C_{\textrm{1D}} (q)\) (which can be calculated from line scan data \(z=h(x)\)) using (see [12, 13]):
where \(q_1\) is the largest wavenumber for which \(C_{\textrm{1D}} (q)\) has been measured.
In calculating the surface roughness power spectrum we have removed the surface slope and curvature of the measured O-ring topography data. The power spectrum is obtained using the Welch window function and Fast Fourier Transformation. Figure 3 shows the surface roughness power spectra of the rubber O-ring (the green and blue lines are obtained from line scans in two orthogonal directions) and of the FR4 surface (pink line). The power spectrum of the O-ring exhibit a roll-off region of nearly 1 decade in wavenumber. The red line is a fit-line to the O-ring power spectrum which we use in the numerical study below. The smallest wavenumber is denoted by \(q_0\) (we use \(q_0 = 10^3 \ \textrm{m}^{-1}\)) but the leakage rate is insensitive to \(q_0\) as long as it is in the roll-off region. The largest wavenumber used is denoted \(q_1\) but the exact value of \(q_1\) is also unimportant as long as the critical junction occur for a wavenumber smaller than \(q_1\) (see below). Note that for most length scales the rubber surface is much rougher than the (elastically stiff) FR4 countersurface, and in the study below we use the red fit-line extended linearly to larger wavenumber.
Figure 4 shows the surface height probability distribution of the rubber O-ring (green line) and of the FR4 surface (pink line). Both surfaces have nearly Gaussian height distributions, as expected for randomly rough surfaces, but the O-ring has a rms-roughness about 10 times bigger than the FR4 surface. This is expected since the rms-roughness is determined by the most long-wavelength roughness components, which have much smaller amplitude for the FR4 surface, as shown by the roughness power spectra (see Fig. 3).
3 Nominal Contact Pressure and Area of Contact
To obtain the nominal contact pressure profile and the area of real contact we need to know the elastic properties of the contacting materials. Since the FR4 countersurface is elastically much stiffer (and smoother) than the rubber O-ring we can treat the substrate as rigid and perfectly flat.
The O-ring is made from a closed-cell EPDM foam rubber with the mass density \(\rho \approx 510 \ \mathrm{kg/m^3}\). We do not know the mass density of the solid EPDM rubber used, but using the typical density \(\sim 1200 \ \mathrm{kg/m^3}\) gives the porosity \(\approx 0.6\) (pore space volume to bulk volume).
We have measured the (static) elastic modulus of the rubber O-ring at \(\sim 3\%\) strain and found it to be \(E_0 \approx 0.67 \ \textrm{MPa}\). A very similar modulus is obtained from the quoted shore hardness \(S=20\) using the relation proposed by Gent [14] (with E in \(\textrm{MPa}\)):
which gives \(E=0.73 \ \textrm{MPa}\). The Poisson ratio of the foam is close to zero and we will use \(\nu _0 = 0\).
The O-ring foam rubber is covered by a surface film of thickness \(d \approx 50 \ \mathrm{\mu m}\) which is likely to have an elastic modulus somewhere between that of the (macroscopic) foam and the (compact) rubber used for the foam. The surface film can be seen in Fig. 1b which shows an optical picture of a cross-section of the rubber O-ring. Note that between the cavities, and at the rubber surface, there are thin films of thickness \(\sim 50 \ \mathrm{\mu m}\) consisting of nearly compact rubber. The surface film is assumed to have a Young’s modulus \(E_1>E_0\) larger than the macroscopic modulus \(E_0\) of the foam, and the Poisson ratio \(\nu _1\). In the following study we use, unless otherwise stated, \(E_1 = 3.7 \ \textrm{MPa}\) and \(\nu _1 \approx 0.5\). We note that the effective (secant) modulus of (unfilled) EPDM at \(20-40\%\) strain in the rubbery frequency (or temperature) region is typically in the range \(E_1 \approx 3-4 \ \textrm{MPa}\) (see Ref. [15]). The Poisson ratio \(\nu\) of all rubber compounds in the rubbery region is close to 0.5.
In general one may ask why there are no gas bubbles or cavities in the rubber surface. This may be related to the Van der Waals interaction which in the present case would result in effective repulsive forces acting between the cavities and the rubber surface during the formation process, where the rubber surface is contacting another surface (probably steel). Also the rubber in the liquid state is likely to wet the solid confining walls.
Rubber materials, and rubber foams, are viscoelastic materials with a modulus which decreases with increasing time [16]. For applications where the rubber is in the rubbery region of the viscoelastic response the time-dependency is rather weak. In addition, in the present case the foam and the surface film are made of the same material and may have similar time-dependency of their effective modulus. (This assumes that during deformation air (or gas) does not diffuse between the different cavities in the foam. If such diffusion would occur it would introduce another relaxation process not described by the frequency (and temperature) dependency of the bulk rubber modulus.) Here it is also important to note that for a homogeneous material, for a fixed compression the leakage rate of a seal is independent of the elastic modulus of the sealing material. The reason for this is that decreasing the elastic modulus decreases the contact pressure but at the same time the pressure needed to squeeze the rubber into the roughness profile decreases, and the two effects cancel each other so the contact area (and the distribution of interfacial separation) remain unchanged [8]. For real rubber materials, with non-linear stress–strain relations, this hold strictly true only if the microscopic strain in the asperity contact regions is similar to the macroscopic strain in the Hertz contact region. Here we have also assumed that the fluid (gas or liquid) pressure is negligible compared to the contact pressure in the rubber-countersurface contact region. For layered materials the leakage rate does depend on the elastic modulus of the top layer and the underlying material but if both depends on time in the same way (say \(E_1(t) = \lambda E_0(t),\) where \(\lambda\) is a constant), then the leakage rate would be time independent for the reason given above.

The calculated nominal contact pressure between the rubber O-ring and a flat counter surface. The O-ring (made from EPDM rubber foam) has the cross-section radius \(R=3.5 \ \textrm{mm}\) and the effective Young’s modulus \(E_0 \approx 0.67 \ \textrm{MPa}\) and Poisson ratio \(\nu _0 \approx 0\). The O-ring compression \(\delta /R = 0.26\)
The Hertz contact pressure is given by [17]
The maximum pressure \(p_{\textrm{max}}\), the contact width \(w=2a\), and the force per unit length F/L acting on the O-ring are given by:
where \(\delta\) is the penetration (and \(\delta /R\) the compression). Note that the O-ring curvature radius R only enter in determining the nominal contact pressure given by (3).
Figure 5 shows the calculated [using (3)] nominal contact pressure between the rubber O-ring and a flat counter surface. The O-ring (made from EPDM rubber foam) has the radius \(R=3.5 \ \textrm{mm}\) and the effective Young’s modulus \(E_0 \approx 0.67 \ \textrm{MPa}\) and Poisson ratio \(\nu _0 \approx 0\). The O-ring compression \(\delta /R = 0.26\), the maximum contact pressure \(p_{\textrm{max}} = 0.171 \ \textrm{MPa}\) and the contact width \(w=3.57 \ \textrm{mm}\). We note that the very thin surface film (we use \(d=50 \ \mathrm{\mu m}\) below) with higher modulus than the bulk modulus has a negligible influence on the nominal contact pressure.
The Hertz theory is valid for small compression and it is not clear how accurate the results are for \(\delta /R = 0.26\), where the contact width w is about half the diameter of the cylinder. We are not aware of any study of this problem for the cylinder geometry, but for the Hertz contact between a sphere and a flat surface FEM calculations [18] show that for the compression 0.2 the contact pressure agree nearly perfectly with the Hertz prediction, and even for the compression 0.66 the maximal contact pressure is only \(\sim 13\%\) larger in the FEM study than predicted by the Hertz solution. We expect that similar results to hold for the cylinder geometry.

The relative area of real contact as a function of the magnification \(\zeta\) (lower scale) or wavenumber \(q=q_0\zeta\) (upper scale) for several different film thickness d. The contact area is assumed to percolate when \(A/A_0 = 0.42\) (dotted line) and occur in the wavenumber range \(4.55< \textrm{log}_{10} q < 5.33\) when d varies from \(0.5 \ \textrm{mm}\) to \(0.025 \ \textrm{mm}\). The bulk and surface layer elastic modulus \(E_0=0.67 \ \textrm{MPa}\) and \(3.7 \ \textrm{MPa}\), respectively. The nominal contact pressure \(p=0.171 \ \textrm{MPa}\)
The relative contact area \(A(x)/A_0\) is calculated “locally” using the pressure \(p=p_{\textrm{H}}(x)\); in Fig. 6 we show \(A/A_0\) for the maximum nominal contact pressure. The region close to where \(p_{\textrm{H}}\) is maximal is most important for the sealing. We use the Persson contact mechanics theory to calculate the contact area. In its simplest (original) form the relative contact area
where \(\textrm{erf}(x)\) is the error function, and where \(\xi = \xi (\zeta )\) is the surface root-mean-square (rms) slope including only roughness components with wavenumber \(q<q_0 \zeta\), which can be calculated from the power spectrum using
Figure 6 shows the relative area of real contact as a function of the magnification \(\zeta\) (lower scale) or wavenumber \(q=q_0\zeta\) (upper scale) for several different film thickness d. The squeezing pressure \(p=p_{\textrm{max}} = 0.171 \ \textrm{MPa}\). The contact area is assumed to percolate when \(A/A_0 = 0.42\) (dotted line) and occur in the wavenumber range \(5.55< \textrm{log}_{10} q < 6.19\) when d varies from \(100 \ \mathrm{\mu m}\) to \(25 \ \mathrm{\mu m}\). Note that in all cases the contact area percolate (for \(q=q_{\textrm{c}}\) or \(\zeta = \zeta _{\textrm{c}}\)) in a wavenumber region where the power spectrum has been calculated so the extrapolated region is not very important for the leakage. In addition, for wavenumber \(q<q_{\textrm{c}}\) the power spectrum of the FR4 substrate is much smaller than of the O-ring so neglecting the former contribution to the power spectrum is a good approximation.
4 Leakage: Critical Junction Theory
We first estimate the leakrate using the critical junction theory and in the next section we use the more accurate (modified) Bruggeman effective medium theory.
Let us study the contact between the O-ring and the counter surface within one square unit \(w\times w\) of the contact (there are L/w such units, where L is the length of the O-ring), as we change the magnification \(\zeta\). We define \(\zeta = q/q_0\), where q is the wavenumber of the largest surface wavenumber component included in the roughness profile. We study how the apparent contact area (projected on the xy-plane), \(A(\zeta )\), between the two solids depends on the magnification \(\zeta\). At the lowest magnification we cannot observe any surface roughness, and the contact between the solids appears to be complete i.e., \(A(1) = A_0\). As we increase the magnification we will observe some interfacial roughness, and the (apparent) contact area will decrease. At high enough magnification, say \(\zeta =\zeta _{\textrm{c}}\), a percolating path of non-contact area will be observed for the first time. We denote the most narrow constriction along this percolation path as the critical constriction. The critical constriction will have the lateral size \(\lambda _{\textrm{c}} \approx 2\pi /(\zeta _{\textrm{c}} q_0)\) and the surface separation at this point is denoted by \(u_{\textrm{c}}\). We can calculate \(u_{\textrm{c}}\) using the contact mechanics theory developed in Ref. [19,20,21] (see below). As we continue to increase the magnification we will find more percolating channels between the surfaces, but these will have more narrow constrictions than the first channel which appears at \(\zeta = \zeta _{\textrm{c}}\), and as a first approximation one may neglect the contribution to the leak rate from these channels. A first rough estimate of the leak rate is obtained by assuming that all the leakage occurs through the critical percolation channel, and that the whole pressure drop \(\Delta P = P_{\textrm{a}}-P_{\textrm{b}},\) (where \(P_{\textrm{a}}\) and \(P_{\textrm{b}}\) are the pressures to the left and right of the seal) occurs over the critical constriction.
The separation \(u_{\textrm{c}} \approx u_1(\zeta _{\textrm{c}})\), where \(u_1(\zeta )\) is the (average) separation between the surfaces which moves out of contact as the magnification is increased from \(\zeta\) to \(\zeta +d\zeta\). It can be calculated from the average surface separation \({{\bar{u}}}(\zeta )\) at the magnification \(\zeta\) using
where \({\bar{u}}' = d{\bar{u}}/d\zeta\) and similar for \(A'\). The derivation of the equations for \({\bar{u}}\) and \(u_1\) was given in Ref. [19,20,21].
Figure 7 shows the average surface separation \({\bar{u}} (\zeta _{\textrm{c}})\) (blue squares), and the separation \(u_1(\zeta _{\textrm{c}})\) (red squares) between the surfaces at the critical junction (where \(A/A_0 = 0.42\)), as a function of the thickness d (in mm) of the surface layer. The equations determining \({\bar{u}}\) and \(u_1\) was given in Ref. [19,20,21]. Since the surface layer is elastically stiffer than the bulk of the O-ring, as d increases both the average surface separation and the separation at the critical junction increases.
The surface layer has a thickness of order \(\sim 50 \ \mathrm{\mu m}\) so we are interested in \(u_1(\zeta _{\textrm{c}})\) for such film thickness. We get \(u_1(\zeta _{\textrm{c}}) = 703 \ \textrm{nm}\), \(354 \ \textrm{nm}\) and \(164 \ \textrm{nm}\) for \(d=100 \ \mathrm{\mu m}\), \(50 \ \mathrm{\mu m}\) and \(25 \ \mathrm{\mu m}\), respectively. The height of the critical junction for \(d=50 \ \mathrm{\mu m}\) is so small that one need to take into account ballistic motion of the gas molecules. We use the following interpolation formula for the gas leakage through the critical junction (see (22) in Ref. [22]):
Here \(h=u_1(\zeta _{\textrm{c}})\) is the surface separation at the critical junction, and \(\Delta P = P_{\textrm{a}}-P_{\textrm{b}}\) the gas pressure difference between the two sides. We have assumed \(P_{\textrm{b}}>> \Delta P\). Also \(\ell\) is the mean free path for a \(\textrm{N}_2\) gas molecule and \({\bar{v}}\) is the average gas molecule velocity. Note that \(P_{\textrm{a}} \approx P_{\textrm{b}} \approx 1 \ \textrm{bar}\) and the temperature \(T=20^\circ \textrm{C}\).

The average surface separation \({\bar{u}} (\zeta _\textrm{c})\) (blue squares), and the separation \(u_1(\zeta _{\textrm{c}})\) (red squares) between the surfaces at the critical junction (where \(A/A_0 = 0.42\)), as a function the thickness d (in mm) of the surface layer. For \(d=25 \ \mathrm{\mu m}\) and \(50 \ \mathrm{\mu m}\) we have \(u_1(\zeta _{\textrm{c}}) = 164 \ \textrm{nm}\) and \(354 \ \textrm{nm}\), respectively,
If \(P_0\) is a reference pressure then the volume of gas at pressure \(P_0\) leaking through the junction can be obtained using the ideal gas law \(P_0 \dot{V} = \dot{N} k_{\textrm{B}} T\). Using (7) this gives
Here we choose \(P_0= 1 \ \textrm{bar}\) so \(\dot{V}\) is the volume of gas of atmospheric pressure leaking through the seal per unit time.
Equation (8) provides the leakrate for a square contact unit. To get the total leakrate we need to multiply the result of (8) with the factor \(L_y/L_x\), where \(L_y\) is the length of the O-ring and \(L_x\) the width of the contact in the fluid flow direction.
Equation (8) assume a constant nominal pressure in the contact region. Here we are interested in a Hertzian pressure distribution, and for this case we will present numerical results in the next section. However, we can still use (8) with \(p=p_{\textrm{max}}\) to estimate the leakage if we choose the contact width \(L_x\) appropriately. Comparing the theory prediction for the Hertzian contact with the theory prediction using (8) (with \(u_1(\zeta )\) calculated for the nominal contact pressure \(p = p_{\textrm{max}}\)) shows that using \(L_x \approx 0.36 w,\) (where \(w \approx 3.57 \ \textrm{mm}\) is the width of the Hertzian pressure distribution) gives nearly the same (critical junction) leakage as for the Hertzian contact.
Assuming \(u_1(\zeta _{\textrm{c}}) =354 \ \textrm{nm}\) as obtained for \(d=50 \ \mathrm{\mu m}\), we get from (8) with the additional factor \(L_y/L_x = (40 \ \textrm{m})/(0.36\times 3.57 \ \textrm{mm}) \approx 3.1 \times 10^4\) that \(\dot{V} \approx 7 \ \mathrm{mm^3/s}\).

The logarithm of the volume of gas (at atmospheric pressure) leaking through the seal per second as a function of the maximum of the nominal contact pressure. The nominal contact pressure is obtained by scaling the actual contact pressure shown in Fig. 5 with a factor \(s\le 1\). The highest pressure point \(p_{\textrm{max}}=0.171 \ \textrm{MPa}\) in the figure corresponds to \(s=1\) and hence using the pressure profile shown in Fig. 5. The different lines correspond to different thickness d of the surface film, which is assumed to have the elastic modulus \(E_1=3.7 \ \textrm{MPa}\) and Poison ratio \(\nu _1=0.5\). The foam rubber below the surface film has elastic modulus \(E_0=0.67 \ \textrm{MPa}\) and Poison ratio \(\nu _0=0\). The gas pressure on the two sides of the rubber seal are \(P_{\textrm{a}} = 1 \ \textrm{bar}+ 500 \ \textrm{Pa}\) and \(P_{\textrm{b}} = 1 \ \textrm{bar}\), respectively. We have assumed \(\mathrm{N_2}\) gas with the viscosity \(1.76\times 10^{-5} \ \textrm{Pas}\) and the molecule mean velocity \({\bar{v}} = 471 \ \mathrm{m/s}\)

The leakrate as a function of the thickness d of the thin surface film. The Young’s modulus of the thin surface film \(E_1=3.7 \ \textrm{MPa}\) and of the substrate \(E_0 = 0.67 \ \textrm{MPa}\)
5 Leakage: Effective Medium Theory
We now show result for the gas leakrate obtained using the (modified) Bruggeman effective medium theory [3, 10] for the gas flow conductivity. Instead of showing results only for the actual pressure profile shown in Fig. 5 we plot the leakrate as a function of the maximum in the Hertz contact pressure profile. That is, the nominal contact pressure \(p(x)=sp_{\textrm{H}}(x)\) is obtained by scaling the actual contact pressure \(p_{\textrm{H}}(x)\) shown in Fig. 5 with a factor \(s\le 1\). The highest pressure point \(p_{\textrm{max}}=0.171 \ \textrm{MPa}\) in Fig. 8 corresponds to \(s=1\) and hence using the pressure profile shown in Fig. 5. The effective medium theory equations used to calculate the leakrate is given in Ref. [5, 10, 22, 23].
Figure 8 shows the logarithm of the volume of gas (at atmospheric pressure) leaking through the seal per second as a function of the maximum of the nominal contact pressure with the highest pressure point \(p_{\textrm{max}}=0.171 \ \textrm{MPa}\). The different lines correspond to different thickness d of the surface film, which is assumed to have the elastic modulus \(E_1=3.7 \ \textrm{MPa}\) and Poison ratio \(\nu _1=0.5\). The foam rubber below the surface film has the elastic modulus \(E_0=0.67 \ \textrm{MPa}\) and Poison ratio \(\nu _0=0\). The gas pressure on the two sides of the rubber seal are \(P_{\textrm{a}} = 1 \ \textrm{bar}+ 500 \ \textrm{Pa}\) and \(P_{\textrm{b}} = 1 \ \textrm{bar}\), respectively. We have assumed \(\mathrm{N_2}\) gas with the viscosity \(1.76\times 10^{-5} \ \textrm{Pas}\) and the molecule mean velocity \({\bar{v}}= 471 \ \mathrm{m/s}\). From the kinetic theory of the viscosity one can calculate the \(\mathrm{N_2}\) mean free path \(\ell = 3\pi \eta {\bar{v}}/8P \approx 97 \ \textrm{nm}\). We have used \(L_y = 40 \ \textrm{m}\) and \(L_x=w=3.57 \ \textrm{mm}\).
Figure 8 shows that for contact pressures \(>0.06 \ \textrm{MPa}\) the leakrate depends nearly exponentially on the contact pressure, and decreases strongly as the film thickness decreases. For the two thickest films, \(d=0.5\) and \(0.2 \ \textrm{mm}\), the leakage is almost independent of the film thickness which result from the fact that with respect to the deformations induced by the roughness these films can be considered as infinite thick.
Figure 9 shows the leakrate as a function of the thickness d of the surface film. The plotted data are taken from Fig. 8 for the highest pressure \(p_{\textrm{max}}=0.171 \ \textrm{MPa}\). The figure shows that the leakage rate approach zero as the film thickness decreases, and without the surface film the contact area would percolate and the leakage rate vanish.
Figure 10 shows the leakrate as a function of the Young’s modulus \(E_1\) of the thin surface film of thickness \(d=50 \ \mathrm{\mu m}\). Note the strong drop in the leakrate as \(E_1\) decreases below \(E_1 \approx 3 \ \textrm{MPa}\). For \(E_1 =E_0 = 0.67 \ \textrm{MPa}\) the contact area percolate and the leakrate vanish but already for \(E_1 <2 \ \textrm{MPa}\) the open flow channels are very narrow and the leakrate negligible for most purposes. The theory predict the leakrate \(dV/dt \approx 1 \ \mathrm{mm^3/s}\) if \(d\approx 25 \ \mathrm{\mu m}\) and \(E_1 = 3.7 \ \textrm{MPa}\) (from Fig. 8), or if \(d\approx 50 \ \mathrm{\mu m}\) and \(E_1 = 3.0 \ \textrm{MPa}\) (from Fig. 10).

The leakrate as a function of the Young’s modulus \(E_1\) of the thin surface film of thickness \(d=50 \ \mathrm{\mu m}\). The substrate has the modulus \(E_0 = 0.67 \ \textrm{MPa}\)
6 Experimental Leakrate Study at CERN
6.1 Gas Tightness Test in a Prototype
A preliminary gas tightness test of the first produced LM2-M0 Module (being a prototype before the mass production and integration) was performed at CERN using the “Pressure Decay Rate” method. Two manometers were used for measuring the absolute pressure in the chamber as well as the atmospheric pressure. A thermometer also used for recording the temperature variations. The data have been analyzed using the “Laminar Leak Model”. By this model we consider that the leakage takes place in channels with laminar gas flow where the leakrate is proportional to the gauge pressure. The leakrate calculated from the measured data, at \(\Delta P=490 \ \textrm{Pa}\) gauge pressure, was \(0.040 \pm 0.008 \ \mathrm{liter/h}\) or \(\approx 11 \pm 2 \ \mathrm{mm^3/s}\).
In the real applications the gauge pressure \(\Delta P=300 \ \textrm{Pa}\). Assuming that the leakrate is proportional to \(\Delta P\), as expected from the theory when \(\Delta P<< P_{\textrm{b}}\), the measured leakrate becomes \(0.025 \pm 0.005 \ \mathrm{liter/h}\) or \(\approx 6.9 \pm 1.5 \ \mathrm{mm^3/s}\).

The cumulative leakrate probability based on 136 quadruplets leakage measurements. The leakrate data for \(dV/dt < 2 \ \mathrm{mm^3/s}\) is uncertain because it is similar to the (estimated) instrumental resolution. The air pressure difference \(\Delta P = 300 \ \textrm{Pa}\)
6.2 Gas Tightness Tests During Integration
Gas tightness tests have been performed during the integration of the NSW Micromegas gas detectors of ATLAS Experiment at BB5 Lab at CERN, from February 2019 to May 2021 [24]. The method used was the so called “Flow Rate Loss” (FRL) [25, 26] using air from a bottle. This test, was performed in all the newly receiving Micromegas quadruplets, 136 in total, using a system consisting by 4 testing branches testing at the same time. The complexity of the experimental gas tightness validation demanded the design of an automated control system [27] based on WinCC-OA. This system was able to enable the processing, the control, and the recording of data obtained by the sensors. The measured quantity was the leak rate (dV/dt) in liter per hour at pressure difference \(\Delta P = 300 \ \textrm{Pa}\). The lasting time of each test was 45–60 min, depending on the convergence of the differential signal in FRL method. The acceptance limit of the leak rate that we used in these tests was specified as a fraction of the volume of the detector under study per unit time, that is, \(6\times 10^{-4}\times V_0\) per hour, where \(V_0\) is the detector volume. Thus, the individual acceptance limits were calculated as: for SM1 \(0.0233 \ \mathrm{liter/h}\), for SM2 \(0.0259 \ \mathrm{liter/h}\), for LM1 \(0.0382 \ \mathrm{liter/h}\) and for LM2 \(0.0370 \ \mathrm{liter/h}\). The overall statistical distribution has been parameterized using Gamma distribution which is a di-parametric distribution. Its parameters have been determined using the calculated mean and rms value and found \(a = 0.923\) (shape parameter) and \(b = 2.123\) (scale parameter), respectively. The Gamma distribution is the “maximum entropy probability distribution” with minimum information (if nothing is known about the distribution under study) [25], and therefore, the fluctuations of the data are due to randomness.
Figure 11 shows the cumulative leakrate probability based on 136 quadruplets leakrate measurements. The average leakrate is \(14.56 \ \mathrm{mm^3}/s\). The large fluctuations in the leakrate between different measurements must result from defects such as scratches or trapped dust particles. Other effects, such as fast barometric pressure variations, could also effect the leakrate. Figure 11 shows that the ideal defect-free system is likely to have a leakrate of \(dV/dt \approx 2 \ \mathrm{mm^3/s}\) (or less) which would be consistent with our theoretical study if \(E_1 \approx 3 \ \textrm{MPa}\) and \(d\approx 50 \ \mathrm{\mu m}\). However, the leakrate depends sensitively on the elastic modulus \(E_1\) of the rubber top film for which no details are given by the manufacturer.
7 Discussion
If the foam rubber O-ring would have the same low elastic modulus at the surface as further inside then the contact area would percolate and no interfacial fluid flow and no leakage would occur. We have found that assuming a \(\sim 50 \ \mathrm{\mu m}\) thick surface film, with an elastic modulus \(\sim 5\) times higher than the bulk modulus result in a leakrate similar to the lowest observed leakrates in the CERN experiments.
In general, layered materials, where the surface film is elastically stiffer than the bulk, are bad as sealing materials. If the surface film is thin it will have a negligible influence on the nominal contact pressure, which will be low if the bulk of the material is elastically soft. However, the surface deformations, in response to surface roughness, may depend only on the elastic properties of the surface film. One example is Teflon coated rubber stoppers for syringes. Uncoated rubber stoppers usually do not leak because the rubber can deform in response to the surface roughness, and the area of real contact usually percolate in the stopper-rib–barrel contact regions. However, rubber stoppers coated by Teflon films almost always leak, even when the Teflon film is only \(15 \ \mathrm{\mu m}\) thick [9]. This is due to the high elastic modulus of Teflon, which is typically \(\sim 100\) times higher than for rubber.
Clearly, to avoid leakage, the sealing material should instead be covered with a film with lower elastic modulus than the (effective) bulk modulus. This fact is used by the octopus to create strong adhesion.
The octopus use suction cups to adhere to surfaces. The inside surface of the suction cups are covered by a film with very low elastic modulus which can deform and follow even very rough surfaces when pressed against the surface. This allow the octopus to seal-off the internal region of the suction cup. Thus, when a sucker comes in contact with something, it flattens and partly conforms to the surface. Muscles in the sucker then contract, reducing the water pressure within the sucker which squeeze the suction cup against the counter surface, forming a watertight seal.
Engineering suction cups are usually constructed using homogeneous materials, e.g., soft polyvinylchloride, but it has recently been suggested [28] that better suction cups (which can adhere to rougher surfaces) should have a layered structure, with an (elastically) softer surface layer than the suction cup body.
8 Summary and Conclusions
Given that, in most cases, the foam rubber is covered by a thin surface film with the effective elastic modulus \(E_1 > E_0\), we investigated the sealing performance of such an O-ring. We have shown that the nominal contact pressure may not be high enough for the contact area to percolate, leading to a leaking seal. For the calculations, the surface roughness power spectrum, obtained from stylus topography measurements, as well as the elastic properties of the rubber O-ring, were used as input data. A particular O-ring used in the NSW Micromegas gas detectors at CERN, has been considered for comparison because of the reliable and accurate leak rate measurements performed during their integration at CERN. The large statistics based on the 136 Quadruplets showed that there are large fluctuations in the leakrate which we attribute to defects such as scratches or dust particles as well as partially to the atmospheric pressure variations. We note that the gas leak tests were performed using the novel method (FRL) which is precise, even in the case of variable gas volume under study, as is the case of the NSW Micromegas gas detectors. The (lowest) measured leakrates are consistent with the theory prediction but the latter depends strongly on the modulus \(E_1\) on the top surface layer on the rubber surface for which no details are given by the manufacturer. However, in principle, it could be measured using e.g., nanoindentation.
Data Availability
This manuscript has no associated data or the data will not be deposited.
References
Persson, B.N.J., Albohr, O., Tartaglino, U., Volokitin, A.I., Tosatti, E.: On the nature of surface roughness with application to contact mechanics, sealing, rubber friction and adhesion. J. Phys. Condens. Matter 17, R1 (2004)
Jacobs, T.D.B., Pastewka, L.: Surface topography as a material parameter. MRS Bull. 47, 1205 (2022)
Dapp, W.B., Lücke, A., Persson, B.N.J., Müser, M.H.: Self-affine elastic contacts: percolation and leakage. Phys. Rev. Lett. 108, 244301 (2012)
Persson, B.N.J., Yang, C.: Theory of the leak-rate of seals. J. Phys.: Condens. Matter 20, 315011 (2008)
Persson, B.N.J.: Interfacial fluid flow for systems with anisotropic roughness, Eur. Phys. J. E 43, 25 (2020). The fluid flow conductivity in this reference has a factor placed in the wrong place. The correct equations are given by Eq. (7) and (8) in Ref. [23]
Müller, C., Müser, M.H., Carbone, G., Menga, N.: Significance of elastic coupling for stresses and leakage in frictional contacts. Phys. Rev. Lett. 131, 156201 (2023)
Scaraggi, M.: Lubrication of textured surfaces: a general theory for flow and shear stress factor. Phys. Rev. E 86, 026314 (2012)
Persson, B.N.J.: Fluid leakage in static rubber seals. Tribol. Lett. 70, 31 (2022)
Rodriguez, N., Tiwari, A., Persson, B.N.J.: Air leakage in seals with application to syringes. Appl. Surf. Sci. Adv. 8, 100222 (2022)
Lorenz, B., Persson, B.N.J.: Time-dependent fluid squeeze-out between solids with rough surfaces. Eur. Phys. J. E 32, 281 (2010)
Persson, J.S., Tiwari, A., Valbahs, E., Tolpekina, T.V., Persson, B.N.J.: On the use of silicon rubber replica for surface topography studies. Tribol. Lett. 66, 1 (2018)
Carbone, G., Lorenz, B., Persson, B.N.J., Wohlers, A.: Contact mechanics and rubber friction for randomly rough surfaces with anisotropic statistical properties. Eur. Phys. J. E 29, 275 (2009)
Rodriguez, N., Gontard, L., Persson, B.N.J.: On how to determine surface roughness power spectra, Tribol. Lett. (to be published)
Gent, A.N.: On the relation between indentation hardness and Young’s modulus. Institution of Rubber Industry - Transactions 34, 46 (1958)
Zirnstein, B., Schulze, D., Schartel, B.: Mechanical and fire properties of multicomponent flame retardant EPDM rubbers using aluminum trihydroxide. ammonium polyphosphate, and polyaniline. Materials 12, 1932 (2019)
Henriques, I.R., Rouleau, L., Castello, D.A., Borges, L.A., Deü, J.-F.: Viscoelastic behavior of polymeric foams: experiments and modeling. Mech. Mater. 148, 103506 (2020)
Johnson, K.L.: Contact mechanics, Cambridge University Press, 28 Aug (1987)
Wu, C.E., Lin, K.H., Juang, J.Y.: Hertzian load-displacement relation holds for spherical indentation on soft elastic solids undergoing large deformations. Tribol. Int. 97, 71 (2016)
Yang, C., Persson, B.N.J.: Contact mechanics: contact area and interfacial separation from small contact to full contact. J. Phys. Condens. Matter 20, 215214 (2008)
Almqvist, A., Campana, C., Prodanov, N., Persson, B.N.J.: Interfacial separation between elastic solids with randomly rough surfaces: comparison between theory and numerical techniques. J. Mech. Phys. Solids 59, 2355 (2012)
Afferrante, L., Bottiglione, F., Putignano, C., Persson, B.N.J., Carbone, G.: Elastic contact mechanics of randomly rough surfaces: an assessment of advanced asperity models and Persson theory. Tribol. Lett. 66, 1 (2018)
Huon, C., Tiwari, A., Rotella, C., Mangiagalli, P., Persson, B.N.J.: Air, helium and water leakage in rubber O-ring seals with application to syringes. Tribol. Lett. 70, 35 (2022)
Persson, B.N.J.: Comments on the Theory of fluid flow between solids with anisotropic roughness. Tribol. Lett. 69, 2 (2021)
ATLAS Collaboration, ATLAS New Small Wheel Technical Design Report, in the framework of ATLAS Phase I Upgrade, CERN-LHCC-2013-006, ATLASTDR-20-2013 (2013)
Alexopoulos, T., Gazis, E.N., Maltezos, S., Koutelieris, G., Koutsoupi, S., Tzanis, P., Tzanos, S., Vlachos, S.: Methods used for gas tightness test and percent oxygen monitoring of the NSW micromegas detectors of LHC-ATLAS experiment. J. Phys: Conf. Ser. 2105(2021), 012022 (2021). https://doi.org/10.1088/1742-6596/2105/1/012022
Alexopoulos, T., Gazis, E. N., Maltezos , S., Vlachos, S., Koutsoupi, S., Makedos, G., Tzanis, P.: A stand-alone and multifunction gas leak tester used for the NSW micromegas validation, ATLCOM-MUON-2021-002 (2021)
Tzanis, P.: Development of detector control systems for the New Small Wheel Upgrade of ATLAS experiment at CERN, Master Thesis NTUA, CERN-THESIS-2020-029, NTUA, https://doi.org/10.26240/heal.ntua.19391 (2020)
Tiwari, A., Persson, B.N.J.: Physics of suction cups. Soft Matter 15, 9482 (2019)
Acknowledgements
We thank our colleagues in Micromegas - NSW collaboration for the useful private communications and discussions about the gas tightness tests.
Funding
Open access funding provided by HEAL-Link Greece. This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-prodit sectors.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors report no declarations of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alexopoulos, T., Gazis, E.N., Maltezos, S. et al. On the Use of Foam Rubber for Sealing Applications. Tribol Lett 72, 39 (2024). https://doi.org/10.1007/s11249-024-01845-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11249-024-01845-5