
Abstract
The nature of snow and the ever-changing environment makes measuring friction on snow and ice challenging. Additionally, due to the low friction involved, the equipment used must exhibit high sensitivity. Previous investigations of ski–snow friction have ranged from small-scale model experiments performed in the laboratory to experiments with full-sized skis outdoors. However, few have been conducted under conditions similar to those encountered during actual skiing. Here, we present a novel sled tribometer which provides highly reproducible coefficient of friction (COF) values for full-sized skis gliding at relevant speeds (approximately 5.9 m/s) in a controlled indoor environment. The relative standard deviation (RSD) of the COF is as low as 0.5%. The continuous recording of velocity allows for innovative investigations into COF variations when skis are permitted to free-glide in a natural setting. Different methods of analysing the results are presented which shows that the precision is not a single number, but a function of the range of velocities over which the average COF is calculated.
Graphical abstract

Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The pursuit of faster and more energy-efficient skiing has driven continuous efforts to improve glide since the invention of skis. Today, choosing and preparing skis to reduce the resistive force caused by friction between the ski and the snow is a key factor for competitive athletes, and an accurate determination thereof is crucial for the technological development of skis and processes that enhance glide [1].
Determining ski–snow friction is, however, challenging due to the ever-changing nature of snow and other ambient conditions. Studies have attempted to simulate ski–snow friction using small-scale test specimens in laboratories, as well as using tribometers with full-sized skis both indoors and outdoors [2,3,4]. However, few studies have been able to replicate actual skiing conditions with full-sized skis at relevant velocities in a controlled environment.
Numerous studies have explored the mechanisms affecting friction between skis and snow, and it appears that the dominant mechanisms contributing to the dry and wet components of friction vary with the given conditions. While the physical understanding of these mechanisms remains incomplete, lubrication by meltwater produced by frictional heating is one of the mechanisms supported by most experimental evidence [5, 6], although certain investigators have proposed alternative mechanisms [7].
Currently, technicians who wax skis use parallel gliding tests to determine ski–snow friction. However, due to slight variations in skiers’ position, movements, and posture, these tests have limitations. The complexity of the interactions involved in determining ski–snow friction also poses a challenge. Numerous factors that continuously change during a race or experiment, including temperature, humidity, solar radiation, wind, and ski properties (stiffness of the camber, texture of the base, choice of wax), as well as velocity and load, influence ski–snow friction.
To determine the coefficient of friction (COF), scientists typically use frictional force measurements or changes in velocity during free gliding. Ski tribometers are also used, categorised as either rotational or linear. In traditional pin-on-disc tribometers, the test specimen, representing the ski base, slides over a surface of snow or ice. However, this method can cause polishing and excessive meltwater lubrication. Additionally, the “mini-ski” specimen must be small or the disc very large to simulate unidirectional sliding representative for the conditions present in the real contact.
A review by Colbeck [8] pointed out that data collected under the conditions of primary interest (i.e., long sliders moving at high velocity on various types of snow) are lacking. The most relevant developments since then are linear tribometers using full-size skis and free-gliding sleds with internal or external sensors. The sled systems resemble a human skier in a static position on full-sized skis while eliminating variations during the glide due to the human factor. Moreover, it can be used in actual ski racing tracks.
Linear tribometers consist of a slider representing the ski gliding along a track of prepared ice or snow. The slider, which may be a full-sized cross-country ski, can be attached and moved along the track by a belt drive [3, 9, 10] or alternatively, a sloped track can be used to utilise gravity [11]. The short length of the tracks used in linear tribometers does, however, require high acceleration to reach desired velocities, which reduces the precision at high velocity and causes vibrations (see e.g., [10]). On the other hand, linear tribometers allow for the use of full-sized skis and movement in a straight line, preventing edge scraping.
Experiments with sled tribometers have been performed at slow velocities due to being pulled by horses [12], or propelled by a spring system [13] with initial velocities of on average 1.4 m/s. Recently, the force in the towing cables of a sled travelling at a maximum velocity of 4 m/s was measured using a load cell to estimate friction force [14]. A similar technique using a spring balance was used in one of the earliest reports on ski–snow friction [6]. However, relying on the force on the cables to determine friction has a drawback; uncontrolled variations in the pulling force can cause the force on the cable to vary, leading to a signal that is only a fraction of the force needed to overcome inertia and accelerate the sled back to a constant velocity, which can significantly reduce measurement accuracy.
Another study utilised a free-gliding linear tribometer consisting of a sled with cross-country skis that was propelled along a track lined with optical sensors to calculate the coefficient of friction based on deceleration [4]. While this method provides a more realistic and continuous recording of velocity, it has limitations as well. The obtained velocity (less than 2.2 m/s) is considerably slower than the average velocity during cross-country ski races (2.8 to 8.3 m/s), and only a short segment of the track was equipped with sensors. Nonetheless, free-gliding deceleration is useful for identifying changes in friction at different velocities.
To accurately measure velocity in free-gliding sled experiments, the time required to travel a known distance can be determined using photocells or other types of gates. Gates have been used to measure velocity in alpine [15, 16], cross-country skiing [4, 17,18,19,20], and sled runners on ice [21]. In one study, a film camera mounted on the sled recorded markings placed at specific distances under the ice [13]. However, this approach only provides the average velocity between gates.
A more modern approach involves the use of optical correlation sensors, which are commonly used in the automotive industry to measure very high ground velocity, e.g., of more than 55 m/s. These devices can be mounted on the vehicle, providing considerable flexibility, and their continuous measurement of velocity, at a high sampling rate, offers a marked advantage over other methods described previously, see e.g., the white paper [22].
Here, we attempt to overcome some of the shortcomings of earlier systems by developing a free-gliding ski tribometer equipped with full-sized cross-country skis that glides in actual ski tracks. A test consisting of 25 repeated runs was conducted, and the resulting COF at a range of velocities, together with the relative standard deviation as an indicator of reproducibility and precision, are presented.
2 Method
The basic idea behind the tribometer is a sensor-equipped sled that is either released to freely glide down a slope or accelerated and launched by an electric winch. The deceleration of the sled is determined by friction and air resistance. In the present setup, schematically illustrated in Fig. 1, full-sized, classic- or skate cross-country skis can be attached to the sled to enable unmanned glide tests in a natural setting and in a repeatable manner.

Schematic illustration of the ski tribometer
The sled consists of a main body with two compartments, an upper with electronics and sensors and a lower compartment with weights. The body is rectangular with the dimensions 30 × 32.5 × 40 cm (\(W\times ~H\times ~L\)). The weight compartment can accommodate up to 130 kg maximum. The total weight of the sled can be freely adjusted to test the influence of the athletes’ body weight. The centre of mass can be adjusted back and forth ± 10 cm from the neutral position to simulate an athlete leaning backwards and forward to shift the weight as in a tucked position, such as the variants studied in [23]. Figure 1 shows the sled attached to a pair of skis with the centre of mass adjusted backwards roughly 5 cm from the neutral position.
A handlebar is mounted on each side for manoeuvrability when changing skis and configuring the sled. A 3D-printed shoe was designed in-house (described as the “measurement boot” in [24], and mounted to the sled in order to replicate the loading condition of a commercially available elite-level ski boot while skiing. The shoe size is adjustable and the distance between them can be adjusted to accommodate ski tracks of different widths. A Kistler Correvit L-Motion optical correlation sensor is used to continuously record the velocity during the acceleration and deceleration phases. It has a 500 Hz sampling rate and is connected to a Vector GL2000 CAN-bus logger with a maximum sampling rate of 1000 Hz.
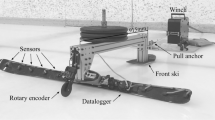
An electric winch (Rewinch) is used to accelerate the sled to the desired speed. Speeds up to 12.5 m/s are possible using the current setup, and up to 23.6 m/s would be possible with a change of gearing or using pulleys. The acceleration type until the desired speed is reached can be set to exponential or linear. The top speed of 12.5 m/s is reached within 4 s and the starting distance is 20 m. It is safe for indoor use without harmful emissions compared to traditional high-speed winches using internal combustion engines. The winch is attached to a custom-built stand where the cable is routed through an open pulley and attached to a hook on the sled. When the sled passes the pulley, the rope is pulled upwards and the sled is released. To hold the stand in place the four legs are planted in roughly 20 cm deep holes. The location can be freely chosen, and the system is quick to deploy and ready to launch in a matter of minutes. Natural slopes could be used to accelerate the sled outdoors, but the combination of a slope that gives desired speed followed by a straight and flat section long enough to provide precise measurements of the deceleration phase is rare. The system was developed to be used in an indoor environment primarily, but it may also be used outdoors, although with the additional challenges associated with a more dynamic environment (wind, sun radiation, precipitation, track inclination etc.). The main test location is an indoor snow test facility (Arctic Falls, Piteå, Sweden), providing a \(\approx\)120 m long test track prepared on artificial snow produced in-house. The air climate is controlled at temperatures from − 3 to − 12 \({}^{\circ }\text {C}\) with relative humidity (RH) from 50 to 90%. Because of the large volume (a base area of \({10,000}\,\hbox {m}^{2}\) and a relatively high ceiling), the temperature is less prone to disturbances compared to smaller test chambers where entering the facility to make adjustments could cause temperature swings [9]. The produced snow has an average grain size of 0.1 mm. For the tests, the ski track is prepared using a mix of old and new snow. Figure 2 shows a photo of the sled inside the indoor test facility.

Photograph of the sled inside the Arctic Falls indoor testing facility with certain aspects indicated
A ski track is required to ensure the sled does not derail from the intended path when transitioning from the acceleration to the deceleration phase. The ski track is prepared with a track setter mounted on a snowcat the day before testing and left to sinter overnight. The flatness of the snow surface of the prepared test track is kept within ± 5 cm over a distance of 100 m (measured using a Trimble S7 Total Station) , with a maximum local (5 mm over a distance of 1 m) inclination of 0.5%, by the use of a semi-autonomous laser-guided snow grader. Calibrated temperature and humidity probes (BAPI Blü-Test, BA/BT-TH) are used to log trends during the test session.
2.1 Experimental routine and data analysis
Figure 3 presents a typical velocity curve as acquired from the optical correlation sensor. During the acceleration phase, the sled is pulled by the winch with variable force input to reach the set speed within 4 s. When the sled is released, it enters the deceleration phase and then glides freely until it comes to a full stop.
Since the velocity, u, is recorded at a high sample rate, it inevitably captures vibrations, which appear in the signal as the optical sensor vibrates at the same rate as the sled. The high-frequency vibrations can be filtered out by pre-processing the velocity data with a moving average filter, by a linear least squares (LSQ) fit or by a convolution of du/dt with a suitable kernel which has the effect of smoothing out vibrations. In this case, a moving average filter was used.
Since both the out-of-flatness and inclination of the ski track are small, the resistive forces will mainly come from the friction force in the ski–snow contact and the air drag. The estimated COF for the ski–snow contact, denoted \(\mu\), is a function of the horizontal ground speed of the sled, u, that can be calculated from Newton’s second law, i.e., (1), if we know the acceleration, \(a={\text{d}}u/{\text{d}}t\), the curvature, 1/R, of the ski track and the associated inclination, \(\theta\), as well as the contribution from the air drag, defined, in (2), as the coefficient of drag, \(\mu _{d}\). That is,
where \(u_t\) is the tangential speed, \(g=9.82\, \hbox {m}/\hbox {s}^{2}\). The coefficient of drag (as a function of speed) is given by
where \(\rho =1.293 \hbox {kg}/\hbox {m}^{3}\) is the density of air, \(c_d= 1.0\) is specified as the (air) drag coefficient, \(A =0.0975 \hbox {m}^{2}\) is the projected frontal area of the sled, \(u_w\) is the wind speed in the direction of motion (plus if there is front and minus if tailwind), and m is the total mass of the sled.
However, due to the small out-of-flatness and minute inclination of the ski track in Arctic Fall’s indoor testing facility, \(u_t\approx u\), \(\theta \approx 0\) and \(1/R\approx 0\), hence (1) should not be much different from
Note that, all of the measurements are conducted on the same track, and we are mainly interested in a qualitative measure of the ski–snow friction. In the numerical analysis, the speed-dependent deceleration, \(a_{dec}(u)\), is, therefore, calculated as the slope of a linear (least-square) fit of the slope of the moving average filtered velocity signal, within a given velocity interval (Fig. 3). Effectively, this means that the deceleration is considered to be constant, i.e., \(a_{dec}(u)=a_{\text{dec}}(u_m)\), within the interval \(u\in u_m\pm \Delta u/2\), where \(u_m\) is the mean velocity of the interval. Hence,
since \(u_w = 0\) in the present analysis which is based on indoor measurements.
The speed vs time data presented in Fig. 3 shows an example where the speed interval, i.e., the shaded region, is \(\Delta u = 1.1\) m/s and \(\mu (u)\) is evaluated for \(u_m=3.6\) m/s. At speeds within the range 4.1 down to 1 m/s the variation in \(a_{\text{dec}}\) is rather small and a relatively large segment, such as the section spanning from 4.1 to 3.1 m/s in Fig. 3, may be used. A large interval has the effect of minimising the standard deviation caused by vibrations and other noise. If there are transitions in \(a_{dec}\), a relatively small segment should be considered. Since both the COF and relative standard deviation (RSD) are presented for the average speed \(u_m\) in the segment, the top speed available for analysis will be lower as the interval size increases.
The interval can be set to a fixed size of \(\Delta u\) or as a function of velocity, i.e., \(\Delta u = u_m/k\), where \(u_m\) is the mean velocity of the interval, and \(k>0\) determines its size. This means that the COF, and the corresponding RSD, are calculated with a progressively decreasing interval size towards lower velocities. This enables a combined analysis with an average COF over almost the entire test, with an increasing level of detail at lower speeds. Reducing the size of the interval as a function of velocity also makes sense if we consider the gradual dampening of vibrations from the release mechanism as the sled glides.

A typical acceleration/deceleration curve (sled velocity vs time), illustrating the evaluation of \(\mu (u)\) at \(u=3.6\) m/s, within the interval \(\Delta u = 1.1\) m/s (shaded region). The data represent velocity vs time filtered by a moving average filter using 50 sampling points (left). The zoomed in view shows the selected interval with velocity data filtered using moving average filters with 5, 50, and 500 sampling points (right) (Color figure online)
The repeatability/precision of the tribometer, which can be defined over a range of scenarios as described in [3, 9, 10], may be estimated by repeated testing. The estimation of the precision of the present methodology is based on tests where the tribometer runs in a single track a repeated number of times during a single session. While performing ski friction testing, the environmental conditions, such as the running-in of the ski or the track, precipitation, temperature, humidity, and radiation, will to some extent undergo transformations. Hence, possible trends in the recorded data should be removed prior to analysing the precision of the tribometer. Otherwise, the precision would be specific to the exact conditions present during the investigation. The standard deviation \(\sigma _{\mu }(u)\) of the COF for each speed interval is calculated as
where \(\mu _i\) are obtained by (4) and \(\mu _{i,fit}(u)\) is the obtained from the linear least-square fit on COF from all repetitions in the velocity interval. A relative measure of the standard deviation (RSD) \(\varepsilon _\mu (u)\) or can then be obtained by dividing \(\sigma _\mu (u)\) by the averaged COF \({\overline{\mu }}(u)\), i.e.,
where \({\overline{\mu }}(u)\) is the averaged COF for all of the N runs, i.e.,
The following routine was employed in order to minimise variations based on how the tests are carried out:
-
Time in starting position for the sled is 30 s to allow the temperature of the skis to stabilise.Footnote 1
-
The winch accelerates the sled to the target speed (5.8 m/s in this case) at which the sled is released.
-
The sled glides freely and decelerates until it stops completely.
-
It is then returned to the starting position by pushing it backwards at a walking pace (\(\approx {1.4}\,\hbox {m}/\hbox {s}\)), in the same track as the test was run.
-
Time between the tests is \(\approx {3}\,\hbox {min}\), including the resting time at starting position
For the tests in this study, the conditions were as follows. The test series is made up of 25 repeated runs (N = 25). A pair of skate skis (Fischer RCS Carbon Lite Skate Plus) were used with a race grind and prepared with a base wax suitable for − 8 \({}^{\circ }\text {C}\). The total weight of the sled was 60 kg and the neutral mounting position was used with centre of mass 13 cm behind the ski binding. The air temperature in the indoor facility was set to − 8 \({}^{\circ }\text {C}\) and the relative humidity 85% RH. The track was made up of round grains of artificial transformed snow with an average grain size of roughly 0.1 mm with the largest grains up to 0.5 mm. The temperature of the snow cooling system was set to − 8 \({}^{\circ }\text {C}\).
3 Results and Discussion
The 25 runs were completed following the testing routine outlined above, where the sled is launched at a target speed of 5.8 m/s and then decelerates to a full stop. The temperature \((-\,8.0\pm 0.5)^\circ \hbox {C}\) of both the air (\(85\pm 1\))%RH and the snow \((-\,8.0\pm 0.2)^\circ \hbox {C}\) was stable during the entire 75 min long session. Figure 4 depicts the recorded velocity data for all of the 25 runs, aligned at the position where the speed is 0.28 m/s. There is a clear trend of decreasing gliding time until a complete stop in order of ascending run number. The gliding distance from the position where the sled attains top speed to where it stops is roughly 100 m. On average, the top speed was found to be \(5.94\pm 0.14\) m/s, but there was no clear correlation between the top speed and the gliding distance. Interestingly, top speed vs time in glide showed a weak correlation.

Velocity vs time for 25 runs aligned at 0.3 m/s, showing the increase in deceleration with each test-run as the session progresses, resulting in higher COF in average (Color figure online)
The pulling force is significantly higher than the friction force, which is evidenced by the much higher gradient (on average \(6\times\)) of the velocity during acceleration than during deceleration. The pulling force during the acceleration phase is not measured and the COF during acceleration can therefore not be determined. It can be seen in Fig. 4 that the velocity curve has a slight concave shape until roughly 0.5 m/s.
Figure 5 depicts the COF determined for each run calculated with Eq. (4), at four different velocities, i.e., at 1.67, 2.78, 3.89, and 5 m/s based on a velocity interval \(\Delta u = 1.1\) m/s (as schematically illustrated in Fig. 3). Only four segments and one of the 25 velocity curves were chosen for the reason of clarity in the figure. The same trend of increase in the COF with increasing test-run number was observed for all velocity segments between 1.1 and 5 m/s (i.e., the speeds at which the COF was determined and depicted for in Fig. 6).

The COF for each of the 25 test runs evaluated at four different velocities (Color figure online)
The resulting COF within the range 1.1 m/s to 5 m/s (based on velocity data within 0.83 m/s to 5.56 m/s using fixed velocity interval \(\Delta u =\) 1.1 m/s) is shown in Fig. 6.
It can be observed that the COF to begin with has a downward trend, with an local peak in the middle and an upward trend at the end after \(\approx 2\) m/s. As the velocity decreases, the precision, as determined by RSD, fluctuates and reaches a minimum at 2.2 m/s of 0.7%.

The mean COF, i.e., \({\overline{\mu }}(u)\), from all of the 25 runs (blue dots, y-axis to the left), calculated for \(u= 5, 4.7, 4.4, \ldots ,\) 1.1 m/s using a fixed velocity interval of 1.1 m/s, with error bars indicating standard deviation, and the relative standard deviation, i.e., \(\varepsilon _\mu (u)\), (red squares, y-axis to the right) (Color figure online)
Results from the same data calculated using a relative segment size of \(k = 2\) are presented in Fig. 7. It shows COF with a slight downward trend and a minimum at around \(\approx 2\) m/s followed by an increase, both in COF and RSD. The RSD is below 1.5\(\%\) from the highest average velocity which is 4.2 m/s (segment from 5.6 to 2.8 m/s) and decreasing as the velocity reduced until an increase at the lowest velocities. The best precision is at 2.1 m/s with RSD as low as 0.5%.

The mean COF, i.e., \({\overline{\mu }}(u)\), from all of the 25 runs (blue dots, y-axis to the left), with error bars indicating standard deviation, calculated for u in the range from 1.3 to 4.2 m/s using a relative velocity interval of \(\Delta u = u/k\) with \(k = 2\), and the relative standard deviation, i.e., \(\varepsilon _\mu (u)\), (red squares, y-axis to the right) (Color figure online)
When using relative velocity intervals, the segments calculated from high velocity are large and should be interpreted as an average COF of the segment. The contribution of air drag to the overall COF is calculated for the mean velocity in the interval and therefore the resulting COF is a rough estimation.
The trend of the COF with repeated tests can be interpreted as a steady run-in of the ski track and possibly the skis. It is to be noticed that, an even more pronounced run-in effect has been observed in the measurement data from other linear tribometers, see Hasler et al. [3], where the first 10 runs were discarded and the following 40 runs were used to analyse the results.
During the test session, the track developed polished (reflective) patches already after a few runs as seen by the naked eye. Patches appeared similar along the length of the track, including the acceleration segment and the section at the end where the sled comes to a full stop. Even if the polishing appear similar along the track, topography measurements [25] would be required to quantify any differences in surface roughness parameters.
A hypothesis for the increasing trend of the COF with repeated tests might originate from the increase in the contact area, due to the run-in of the track surface. It might, for example, be related to ski base–meltwater film interactions. More precisely, the smooth surface of the polished patches may provide for relatively large areas with thin water films, with an increased COF due to the viscous resistance being proportional to the wetted area and the inverse of the film thickness [1]. However, in [26], Colbeck noted that meltwater caps formed by refreezing have been observed on snow grains after several passes of skis. This type of reshaping of the grains will lead to a polished look on the surface and has been shown to produce lower friction (opposite the results presented here). This effect could be due to a decrease in the contact area and, consequently, fewer sharp angular grains impinging the ski. Abrasive wear of the surface would produce more sharp asperities compared to rounded features from melting and refreezing [7]. Huzioka et al. [27] observed flaking at low speeds, which, according to Colbeck [26], should be more pronounced at low speeds and low temperatures.
When the sled is released, vibrations are induced by the sudden vertical forces caused when the winch line detaches from the tow hitch at the front of the sled, where it is attached. These vibrations are dampened as the energy is dissipated and absorbed by the skis as the sled glides, even though the act of gliding itself also generates some vibrations, both from the friction and eventual unevenness in the track.
To investigate the effect of vibrations on precision and COF, one approach could involve launching the sled at varying start velocities and comparing the resulting COF at different pre-determined velocities. However, launching the sled at a higher velocity is likely to amplify vibrations. This, in turn, could trigger additional mechanisms affecting the frictional behaviour. The additional friction-induced heating at the higher velocity could, for instance, result in a higher temperature of the ski base, which in turn might affect the COF at lower velocities. This exemplifies the complexity of ski–snow friction measurements.
A question regarding vibrations is whether, and if so, how, they influence the tribological interface(s) beneath. Lab studies [28] have demonstrated that induced vibrations alter the friction between model skis and a disc of ice. However, further investigation is needed to determine how these vibrations propagate to the tribological interface between the ski and the snow. High-amplitude and low-frequency vibrations, for example, cause the sled to bounce, resulting in cyclic loading and unloading. This impact affects the ski-camber profile and, consequently, the nominal contact area and pressure [23, 24]. However, since all repeated runs in the current study show similar vibration patterns, the repeatability of the tribometer should not be significantly affected.
The precision of a ski–snow tribometer is challenging to represent as a single number since it varies based on the type of analysis performed. Nevertheless, the range between 0.5 and 2% is demonstrated for our tribometer at velocities ranging from 1 to 5.6 m/s in the indoor facility. Linear ski tribometers report precision within a single track in a similar range 1.45% in Auganæs et al. [10], and 0.6% to 1.1% in Lemmettylä et al. [9], depending on the temperature of the snow or 0.35% to 1.24% in Hasler et al. [3] at velocities from 2 to 10 m/s. A practical resolution of 0.001 for COF in the range 0.0054 to 0.0300 was reported by Budde and Himes [4]. This implies a relative standard deviation of 18.5% at the lowest COF and 3.3% at the highest COF, which is significantly higher than in the present work. In this study, and in [4], a free-gliding sled is used, while other linear tribometers employ a forced motion with a friction force measurement device built into the carriage holding the skis. This makes the friction measurement sensitive to variations in the velocity since inertia forces will be much higher than the friction force.
The COF depends of course on many factors, but it is nonetheless interesting to compare the results to those obtained using other ski tribometers. The COF determined from the measurements conducted for speeds from 1 to 5.6 m/s in this paper is found to be within the range 0.020–0.0225 which is in the lower range of what Hasler et al. [3] found, i.e., from 0.02 at 2 m/s to 0.07 at 10 m/s, higher than Lemmettylä et al. [9], i.e., from 0.01 at 2 m/s to 0.02 at 6 m/s, but much lower than Auganæs et al. [10], i.e., 0.057 in the range 1–3 m/s to 0.126 at 8 m/s, with flat-ground skis, and 0.04–0.055 from 1 to 8 m/s with race-ground and race-waxed skis. It is difficult to draw any conclusions from absolute values since different preparations of the ski base have been applied in the four investigations, as well as that they have been performed under different environmental conditions. The only conclusion that can hold for all of the tests presented in the aforementioned studies is that the COF increase with velocity. In [10], the results show a linear decrease in the COF until 2 m/s, where a marked transition, attributed to a change of frictional regime, occurred. A slight downward trend in COF as the velocity decrease can be seen in the present work (Figs. 6, 7), followed by and increase at lower velocity.
The variation of COF with velocity should be carefully interpreted, local irregularities in the track might lead to the local maximum seen in Fig. 6 which is not necessarily a true increase in COF. It is however repeated every run which is encouraging when considering the goal of the study, to quantify the repeatability. When designing a study where an accurate estimation of the true COF or COF-velocity relationship is of interest, the start position could be offset to reveal if the variations are due to properties of the track or other mechanisms.
An advantage of the present tribometer compared to linear tribometers, such as [3, 9, 10], is the possibility of analysing the COF at different velocities during free gliding without an external mechanism acting on the skis. Meaning that the velocity profile is determined by the launch velocity, air drag, ski–snow friction and gravitational forces acting on the ski.
Sources of error when comparing results between test sessions that could influence the repeatability include the straightness of the ski track, which is dependent on the snowcat operator. That is, if the track is not straight, additional resistive forces can arise as the ski scrapes against the side of the track, and the impact would be larger at higher speeds. The scraping may also lead to snow grains and larger particles of snow falling into the track, causing third-body friction. Other variations come from changes in the environment if a long time passes between sessions (mainly a problem outdoors) or surface elevation differences affecting a second track produced on the side for comparison purposes. An advantage of this test method is the ability to quickly accumulate a long sliding distance in a controlled manner, i.e., tens of kilometres per hour is possible with up to 300 m continuous sliding distance each repetition at the current maximum tested speed of 12.5 m/s (preliminary tests outdoors). The winch has the capacity for achieving an even higher speed up to 23.5 m/s, but such tests require careful preparation of a very long straight track and have not yet been conducted.
4 Concluding Remarks
A novel tribometer has been developed and its capabilities and precision was presented by repeated testing of a pair of full-sized cross-country skis in a single track. The sled can be loaded with 30–130 kg and the centre of mass adjusted within ± 10 cm from the neutral position. Using a custom-made boot, the load can be transferred from the sled to the skis in a realistic manner [23].
The tested velocity of 5.6 m/s, and top velocity outdoors 12.5 m/s (comparable to other tribometers using full-size skis [3, 9, 10]) and long sliding distance enable studies of friction and wear under conditions similar to those encountered by elite cross-country skier during races. With minor modifications, even higher speeds approaching those associated with alpine skiing can be achieved.
The use of a unique indoor snow facility enables testing in a controlled and stable environment including temperatures from − 3 \({}^{\circ }\text {C}\) to − 12 \({}^{\circ }\text {C}\). The flexible setup with the winch allows for measurements in locations where it can be accelerated and released to decelerate on flat, downhill or even uphill terrain. If more extreme temperatures and/or other weather conditions are desired, the tribometer can be used for outdoor testing. However, this introduces additional challenges due to the dynamic outdoor environment, which includes factors such as wind, solar radiation, precipitation, track inclination.
Continuous high-frequency measurement of velocity enables studies of transitions between regimes with different COF during free-gliding deceleration. These types of transitions during deceleration cannot be studied without a free-gliding sled. Another differentiating capability compared to other tribometers using full-size skis [3, 9, 10] is the ability to analyse the COF at different velocities in a single run, in contrast to maintaining a constant velocity over a short section of the track (< 15 m) until a stable reading of the averaged COF can be obtained.
As repeated tests were run, the COF tended to increase linearly, probably due to a “run-in” effect of the skis and track. This was also found to be independent of the speed at which the COF was evaluated. Similar changes in the COF with repeated testing have been reported previously [3, 10] and the opposite trend is sometimes seen [9]. This is accounted for by detrending the data when calculating the relative standard deviation (RSD).
The precision of our tribometer, as indicated by the relative standard deviation (RSD), is maintained at a level below 1.5% for all tested velocities. RSD is at its best at 0.5% approximately halfway between the highest and lowest velocities in this test. Based on this result, a strategy for optimising precision for a specific velocity could be to launch the sled at an elevated velocity, ensuring that vibrations have sufficiently dampened by the time the desired velocity is reached. Since the RSD is calculated by dividing the standard deviation by the COF, it follows that the precision of the tribometer improves if the standard deviation is constant as the COF increases. This is important to take into consideration, especially when comparing skis that exhibit similar results when the COF is very low. If significantly lower COF is measured compared to in this study, the precision should be re-evaluated in the same way as was done here.
The accuracy of the COF-values presented here is difficult to assess. This is because there is no gold standard for comparison (as mentioned in [3]). Many factors are involved in the testing of ski–snow friction and the COF determined here might not be generalisable to other conditions. For a valid comparison, all of the different parameters of interest should be included in randomised order in a series of tests, in accordance with the principles of design of experiments.
Data Availability
The data that support the findings of this study are available from the corresponding author upon request.
Notes
Based on temperature measurements performed using thermocouples inserted into the ski base.
Abbreviations
- A :
-
Frontal area \(\hbox {m}^{2}\)
- \(c_d\) :
-
Coefficient of drag –
- \(F_d\) :
-
Aerodynamic force N
- \(F_f\) :
-
Friction force N
- g :
-
Gravitational constant \(\hbox {m}/\hbox {s}^{2}\)
- m :
-
Mass of the sled kg
- R :
-
Track radius of curvature m
- t :
-
Time s
- u :
-
Sled (horizontal) speed \(\hbox {m}/\hbox {s}\)
- \(u_w\) :
-
Wind speed in the direction of motion \(\hbox {m}/\hbox {s}\)
- v :
-
Effective speed \(v=u\pm u_w\) \(\hbox {m}/\hbox {s}\)
- x :
-
Horizontal distance m
- \(\varepsilon _\mu\) :
-
Relative standard deviation of \(\mu\) –
- \(\mu\) :
-
Coefficient of friction (COF) –
- \(\mu _{ad}\) :
-
Coefficient of drag –
- \({\overline{\mu }}\) :
-
Averaged friction coefficient –
- \(\rho\) :
-
Air density \(\hbox {kg}/\hbox {m}^{3}\)
- \(\sigma _\mu\) :
-
Standard deviation of \(\mu\) –
- \(\theta\) :
-
Inclination –
References
Almqvist, A., Pellegrini, B., Lintzén, N., Emami, N., Holmberg, H.-C., Larsson, R.: A scientific perspective on reducing ski-snow friction to improve performance in olympic cross-country skiing, the biathlon and Nordic combined. Front Sports Active Living 4, 844883 (2022)
Bäurle, L., Szabó, D., Fauve, M., Rhyner, H., Spencer, N.D.: Sliding friction of polyethylene on ice: tribometer measurements. Tribol. Lett. 24(1), 77–84 (2006)
Hasler, M., Schindelwig, K., Mayr, B., Knoflach, Ch., Rohm, S., van Putten, J., Nachbauer, W.: A novel ski-snow tribometer and its precision. Tribol. Lett. 63(3), 33 (2016)
Budde, Rick, Himes, Adam: High-resolution friction measurements of cross-country ski bases on snow. Sports Eng. 20(4), 299–311 (2017)
Ambach, W., Mayr, B.: Ski gliding and water film. Cold Regions Sci. Technol. 5(1), 59–65 (1981)
Bowden, F.P., Hughes, T.P.: The mechanism of sliding on ice and snow. Proc. R. Soc. Lond. Ser. A 172(949), 280–298 (1939)
Lever, J.H., Taylor, S., Hoch, G.R., Daghlian, C.: Evidence that abrasion can govern snow kinetic friction. J. Glaciol. 65(249), 68–84 (2019)
Colbeck, S.C.: A Review of the Processes that Control Snow Friction. Number 92-2 in Monograph 92-2. American Society for Testing and Materials, Philadelphia (1992)
Lemmettylä, T., Heikkinen, T., Ohtonen, O., Lindinger, S., Linnamo, V.: The development and precision of a custom-made skitester. Front. Mech. Eng. 7, 661947 (2021)
Auganæs, S.B., Buene, A.F., Klein-Paste, A.: Laboratory testing of cross-country skis—investigating tribometer precision on laboratory-grown dendritic snow. Tribol. Int. 168, 107451 (2022)
Lungevics, J., Jansons, E., Gross, K.A.: An ice track equipped with optical sensors for determining the influence of experimental conditions on the sliding velocity. Latvian J. Phys. Techn. Sci. 55(1), 64–75 (2018)
Eriksson, R.: Friction of runners on snow and ice.pdf (1949)
Kobayashi, T.: On the measurement of coefficent of sliding friction between test-skates and rink ice. Low Temp. Sci. Ser. 28, 243–259 (1970)
Miller, P., Hytjan, A., Weber, M., Wheeler, M., Zable, J., Walshe, A., Ashley, A.: Development of a prototype that measures the coefficient of friction between skis and snow. In: Moritz, E.F., Haake, S. (eds.) The Engineering of Sport 6, pp. 305–310. Springer, New York (2006)
Kaps, P., Nachbauer, W., Mössner, M.: Determination of kinetic friction and drag area in alpine skiing. In: Mote, C.D. Johnson, R.J., Hauser, W., Schaff, P.S. (eds.) Skiing Trauma and Safety, vol. 10, p. 165. ASTM International, West Conshohocken (1996)
Buhl, D., Fauve, M., Rhyner, H.: The kinetic friction of polyethylen on snow: the influence of the snow temperature and the load. Cold Regions Sci. Technol. 33(2–3), 133–140 (2001)
Coupe, R.C., Spells, S.J.: Towards a methodology for comparing the effectiveness of different alpine ski waxes. Sports Eng. 12(2), 55–62 (2009)
Breitschädel, F., Haaland, N., Espallargas, N.: A tribological study of UHMWPE ski base treated with nano ski wax and its effects and benefits on performance. Procedia Eng. 72, 267–272 (2014)
Swarén, M., Karlöf, L., Holmberg, H.-C., Eriksson, A.: Validation of test setup to evaluate glide performance in skis. Sports Technol. 7(1–2), 89–97 (2014)
Lintzén, N: Properties of Snow with Applications Related to Climate Change and Skiing. Luleå University of Technology, Doctoral (2016)
Jansons, E., Lungevics, J., Stiprais, K., Pluduma, L., Gross, K.A.: Measurement of sliding velocity on ice, as a function of temperature, runner load and roughness, in a skeleton push-start facility. Cold Regions Sci. Technol. 151, 260–266 (2018)
Sarrocco, F.: How the optical speed sensor (Correvit S-Motion DTI Type 2055a) can improve the performance in an autonomous race car. White paper
Kalliorinne, K., Hindér, G., Sandberg, J., Larsson, R., Holmberg, H.-C., Almqvist, A.: The impact of cross-country skiers’ tucking position on ski-camber profile, apparent contact area and load partitioning. Proc. Inst. Mech. Eng. Part P (2023)
Kalliorinne, K., Sandberg, J., Hindér, G., Larsson, R., Holmberg, H.-C., Almqvist, A.: Characterisation of the contact between cross-country skis and snow: a macro-scale investigation of the apparent contact. Lubricants 10(11), 279 (2022)
Hasler, M., Mössner, M., Jud, W., Schindelwig, K., Gufler, M., Van Putten, J., Rohm, S., Nachbauer, W.: Wear of snow due to sliding friction. Wear 510–511, 204499 (2022)
Colbeck, S.C.: The kinetic friction of snow. J. Glaciol. 34(116), 78–86 (1988)
Huzioka, T.: Studies on the resistance of snow sledge. v. friction between snow and a plastic plate. Low Temp. Sci. Ser. A 20, 178 (1962)
Lehtovaara, A.: Influence of vibration on the kinetic friction between plastics and ice. Wear 115(1–2), 131–138 (1987)
Acknowledgements
We are deeply grateful to Arctic Falls AB for access to their facilities and support with testing preparations. The authors would like to acknowledge the assistance by Rikard Larsson and Martin Johansson during testing. We would also like to thank Jörgen Claesson and Oliver Olesen (Vector Sweden) and Filipe Casimiro (Rewinch) for their helpful support.
Funding
Open access funding provided by Lulea University of Technology. The authors would like to acknowledge the funding and support from SOK (Swedish Olympic Committee) and Kempe Foundation (Grant no. JCK-2107).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection, and major part of the analysis were performed by the first author. The first draft of the manuscript was written by the first author and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sandberg, J., Kalliorinne, K., Hindér, G. et al. A Novel Free-Gliding Ski Tribometer for Quantification of Ski–Snow Friction with High Precision. Tribol Lett 71, 111 (2023). https://doi.org/10.1007/s11249-023-01781-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11249-023-01781-w