
Abstract
We demonstrate how to use numerical simulation models directly on micro-CT images to understand the impact of several enhanced oil recovery (EOR) methods on microscopic displacement efficiency. To describe the physics with high-fidelity, we calibrate the model to match a water-flooding experiment conducted on the same rock sample (Akai et al. in Transp Porous Media 127(2):393–414, 2019. https://doi.org/10.1007/s11242-018-1198-8). First we show comparisons of water-flooding processes between the experiment and simulation, focusing on the characteristics of remaining oil after water-flooding in a mixed-wet state. In both the experiment and simulation, oil is mainly present as thin oil layers confined to pore walls. Then, taking this calibrated simulation model as a base case, we examine the application of three EOR processes: low salinity water-flooding, surfactant flooding and polymer flooding. In low salinity water-flooding, the increase in oil recovery was caused by displacement of oil from the centers of pores without leaving oil layers behind. Surfactant flooding gave the best improvement in the recovery factor of 16% by reducing the amount of oil trapped by capillary forces. Polymer flooding indicated improvement in microscopic sweep efficiency at a higher capillary number, while it did not show an improvement at a low capillary number. Overall, this work quantifies the impact of different EOR processes on local displacement efficiency and establishes a workflow based on combining experiment and modeling to design optimal recovery processes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Pore-scale imaging and modeling methods which use high-resolution images of pore space to compute physical properties of rocks are a valuable tool to understand the physics of processes occurring in the pore space. These methods have been used to study multiphase flow in porous media, which plays an important role in a wide range of engineering applications such as hydrocarbon recovery (Zubair 2012), \(\hbox {CO}_2\) sequestration in underground saline reservoirs (Kimbrel et al. 2015) and remediation of oil contaminated soil (Porter et al. 2010). The main advantage offered by pore-scale imaging is that it can describe both the highly irregular geometry of pore space and, more recently, the wettability.
There are two main simulation approaches to study multiphase flow in porous media: pore network modeling (PNM) and direct numerical simulation (DNS). In both PNM and DNS, a 3D pore structure is obtained from imaging or statistical reconstruction. In PNM, a pore network that represents the 3D pore structure is first extracted, then multiphase flow in the network is solved based on quasi-static displacement governed by local capillary pressure (Blunt 2001), while in DNS the Navier–Stokes equation for multiphase flow is directly solved through the 3D pore structure. Although DNS is computationally more expensive than PNM, it avoids uncertainty in pore network extraction and more rigorously models wetting phenomena in pore spaces with complicated geometries.
The validity of DNS methods has been investigated through comparisons between simulated and experimentally obtained multiphase flow properties. Pan et al. (2004) showed a good agreement between experimental and simulated drainage and imbibition capillary pressure for a random packing of spheres, using the lattice Boltzmann (LB) method. The LB method also provided good predictions of relative permeability (Ramstad et al. 2012; Boek et al. 2017). Employing another DNS approach, Raeini et al. (2015) used the volume of fluid method to obtain successful predictions of capillary desaturation curves for sandstone samples. In these cases, the porous medium was assumed to be uniformly water-wet. However, it is common to have a non-uniform wettability distribution at reservoir conditions as a result of wettability alteration (Buckley et al. 1998).
Recently, a direct comparison between experiments and simulations for a water-flooding process in a mixed-wet carbonate rock taken from a producing oil reservoir has been presented (Akai et al. 2019). In this work, the pore structure was obtained from micro-CT images of the rock. A non-uniform wettability distribution was incorporated into simulations based on experimentally measured in situ contact angles. Six simulations with different contact angle assignments based on measured values were investigated. Simulated fluid distributions were compared to those obtained from the experiment. When a spatially heterogeneous wettability state was incorporated into the simulation based on experimentally measured contact angles, a good agreement in fluid occupancy and effective water permeability after water-flooding was obtained (Akai et al. 2019). These encouraging results have opened up the possibility to use this method to study more complex injection sequences commonly employed in enhanced oil recovery (EOR).
In this paper, we use direct numerical simulations to investigate the impact of EOR methods on microscopic displacement efficiency for a mixed-wet reservoir rock. First, we provide comparisons of water-flooding between experiments and simulations, focusing on the best matched case to the experiment presented in Akai et al. (2019). Then, we discuss the ability of the model to reproduce experimental measurements of the spatial distribution of remaining oil in a mixed-wet medium. The simulations are performed using the LB method, as it has been used in our previous study of two-phase flow (Akai et al. 2019) where specified contact angles can be input on a pore-by-pore basis.
Using the best match case as a base case, we present a range of mulitphase flow parametric studies representing the application of three EOR processes: low salinity water-flooding, surfactant flooding and polymer flooding. To achieve this, fluid and/or rock properties in the base case are changed to mimic the application of these EOR schemes. For low salinity water-flooding, several mechanisms of additional oil recovery have been proposed in the literature. In this study, we quantify how much additional oil recovery could be explained solely by a change of wettability which is the most accepted mechanism for carbonate rocks to date (Morrow and Buckley 2011; Sheng 2014; Mahani et al. 2015; Bartels et al. 2017). For both surfactant flooding and polymer flooding, their impact on microscopic displacement efficiency is essentially controlled by the balance between capillary and viscous forces. This is explained by Lenormand’s phase diagram in which dominant flow regimes are defined as a function of the capillary number and viscosity ratio (Lenormand et al. 1988). However, this is based on a simple homogeneous wettability system. We predict the impact of capillary number and viscosity ratio on microscopic displacement efficiency for a mixed-wet system through a parametric study for surfactant and polymer flooding.
Although direct numerical simulation is computationally expensive compared to a pore network model (Raeini et al. 2015), there are several benefits of using direct numerical simulation. For low salinity water-flooding, we will show changes in fluid configuration at the sub-pore scale. For surfactant and polymer flooding, we will discuss the recovery mechanisms in terms of the balance between capillary and viscous forces, which is difficult to obtain with a pore network model which assumes quasi-static displacement (Blunt 2001).
Our main goal is to provide insights into the impact of these EOR applications on microscopic displacement efficiency for the mixed-wet state which is commonly encountered in oil reservoirs.
2 Methods and Materials
2.1 The Two-Phase Lattice Boltzmann Method
Our 3D two-phase lattice Boltzmann (LB) model is based on the color-gradient LB model proposed by Halliday et al. (2007) and constructed with a D3Q19 lattice which consists of a set of 19 discrete lattice velocity vectors, \({\mathbf {e}}_i\) in three-dimensional space. We define particle distributions of two immiscible fluids, labeled red and blue, as \(f^r_i\) and \(f^b_i\), respectively. The fluid density (\(\rho _r\) and \(\rho _b\)) and velocity (\({\mathbf {u}}\)) at position \({\mathbf {x}}\) and time t are obtained by
where \(f_i\) is the total particle distribution given by \(f_i=f^r_i+f^b_i\) and \(\rho \) is the total fluid density given by \(\rho =\rho _r+\rho _b\). The lattice Boltzmann equation for the total particle distribution is written as
where \(\delta t\) denotes the lattice time step which is set to unity and \(\varOmega _i({\mathbf {x}},t)\) and \(\phi _i\) are the collision operator and the body force term, respectively. For the collision operator, we use the Bhatnagar–Gross–Krook (BGK) collision operator (Qian et al. 1992) expressed as
where \(\tau \) is the single relaxation time which determines the fluid kinematic viscosity, \(\nu \), as \(\nu =(\tau -0.5)/3\) and \(f_i^{{\mathrm{eq}}}\) is the equilibrium distribution function which is obtained by a second-order Taylor expansion of the Maxwell–Boltzmann distribution with respect to the local fluid velocity. Although the BGK operator is a common choice owing to its simplicity and efficiency, it can be inaccurate when the fluid viscosity is large (Krüger et al. 2017). In such case, it is recommended to use multiple-relaxation-time (MRT) collision operators to overcome this problem (D’Humieres et al. 2002). Here, we use the BGK operator since the viscosity ratios we consider are not large. A color function \(\rho ^N\) is defined to track the location of the interface as
Using the color function, the interfacial tension between two fluids is computed as a spatially varying body force, \({\mathbf {F}}\), based on the continuum surface force (CSF) model (Brackbill et al. 1992) given by
where \(\sigma \) is the interfacial tension and \(\kappa \) is the curvature of the interface. This spatially varying body force \({\mathbf {F}}\) is incorporated into the lattice Boltzmann equation through the body force term \(\phi _i\) using the forcing scheme proposed by Guo et al. (2002). Further details of our LB model can be found in Akai et al. (2018).
At solid–fluid boundary lattice nodes, a full-way bounce back boundary condition is implemented to achieve the non-slip boundary condition. In addition, the wettability of solid surface is modeled by specifying contact angles using the wetting boundary condition presented in Akai et al. (2018) which accurately assigns contact angles for 3D arbitrary geometries with smaller spurious currents compared to the widely used fictitious density boundary condition. A constant velocity and constant pressure boundary condition (Zou and He 1997) are applied at inlet and outlet boundary lattice nodes, respectively.
2.2 A Water-Flooding Experiment Performed Using a Micro-CT
Alhammadi et al. (2017) conducted water-flooding experiments on three carbonates conditioned to different wettability states. Three small samples of diameter 4.8 mm and length between 13 and 16 mm were extracted from the same larger core plug taken from a producing oil reservoir. This carbonate rock was mainly composed of calcite (96.5 wt%), and the helium porosity and permeability measured on the larger core plug were 27.0% and \(6.8\times 10^{-13}\hbox { m}^2\) (686 mD), respectively (Alhammadi et al. 2017). The three samples were aged using different aging protocols with different temperatures and crude oil compositions, resulting in three distinct wettability states.
The water-flooding experiments were conducted inside a micro-CT scanner. Fluid distributions before and after water-flooding were obtained by segmenting the raw-CT images at a voxel size of \(2\,\upmu \hbox {m}\). Furthermore, in situ contact angle measurements using the method of AlRatrout et al. (2017) were performed on the segmented images after water-flooding. More than 400,000 measured angles obtained for each sample indicated three wettability states, i.e., a weakly water-wet sample with a mean contact angle and standard deviation of \(77^\circ \pm 21^\circ \), a neutrally-wet sample with angles of \(94^\circ \pm 24^\circ \), and a weakly oil-wet sample with angles of \(104^\circ \pm 26^\circ \). The details of the experiments can be found in Alhammadi et al. (2017).
3 Results
In this part, we present the two key stages of our combined experimental and modeling study. In Sect. 3.1, we show comparisons between water-flooding experiments and simulations, focusing on the best matched case presented in Akai et al. (2019). Then, in Sect. 3.2, taking the best matched water-flooding simulation model as a base case, several parametric studies are performed and discussed for low salinity water-flooding, surfactant flooding and polymer flooding.
3.1 Comparison Between the Water-Flooding Experiment and Simulations
3.1.1 The Best Matched Simulation Model
Among the three water-flooding experiments conducted on samples with different wettability states described in Sect. 2.2, the most oil-wet sample with a mean contact angle of \(104^\circ \) was chosen for our study. This experiment was performed at 10 MPa and \(80\,^{\circ }\hbox {C}\). At these conditions, the viscosity of crude oil and brine used for the experiment were \(2.02\,\hbox {mPa}\,\hbox {s}\) and \(0.358\,\hbox {mPa}\,\hbox {s}\), respectively (Alhammadi et al. 2017). A sub-volume with a size of \(256 \times 256 \times 200\) grid blocks with a size of \(5\,\upmu \hbox {m}\) (\(1.28 \times 1.28 \times 1.00\,{\hbox {mm}}^3\)) was extracted from the central part of the image. For water-flooding simulations, void space buffer zones of 10 lattice nodes at the inlet and outlet were attached to the pore structure. Pore spaces extracted from the segmented CT images were partitioned into 360 individual pore regions using the separate object algorithm in commercial image analysis software. Note that although direct numerical simulations do not require a pore partitioning, we define individual pore regions to assign different contact angles for each pore region and to analyze the simulation results in terms of fluid occupancy of each pore region. The pore size was defined as the diameter of the largest sphere which could fit in each pore region. As a result, the average pore diameter was \(56\,\upmu \hbox {m}\), where pores of this size and larger accounted for 50% of the total pore volume. Figure 1 shows the 360 pore regions and their pore size distribution.

a The 360 partitioned pore regions defined in the sub-volume used for the simulations. b Pore size distribution defined as the diameter of the largest sphere which could fit in each pore region
Within the sub-volume, 485,111 measured contact angles with a mean and standard deviation of \(107^\circ \pm 25^\circ \) were available. A mean contact angle for each pore region was obtained by taking an average of measured values within it. Based on the mean angle, individual pore regions were divided into three wettability states based on the criteria shown in Table 1: oil-wet (OW) pores, neutrally-wet (NW) pores and water-wet (WW) pores. For 13 pores out of 360, there were no measured values since in the experiment no three-phase contact line was detected within them. These pore regions accounted for only 0.09% of the pore volume and were assumed to be NW.
The simulation was initialized with a fluid distribution obtained from the micro-CT images before water-flooding. The capillary number Ca and oil/water viscosity ratio M are defined by
where \(\mu _{\mathrm{w}}\) and \(\mu _{\mathrm{o}}\) are the viscosity of water and oil, respectively, \(q_w\) is the Darcy velocity of injected water, and \(\sigma \) is the interfacial tension. In the experiment, water-flooding was conducted with \({\mathrm{Ca}}=3.3 \times 10^{-7}\) and \(M=5.64\), while water-flooding in the simulations was performed with \({\mathrm{Ca}}=3.0 \times 10^{-5}\) and \(M=5.00\). Because computational time significantly increases as the capillary number decreases below \(10^{-5}\), our simulations were performed with Ca of order \(10^{-5}\) similar to other studies using direct numerical simulations for water-flooding (Raeini et al. 2014; Leclaire et al. 2017; Boek et al. 2017; Jerauld et al. 2017). Chatzis and Morrow (1984) reported that an average capillary number below which mobilization of residual oil occurs was \({\mathrm{Ca}}=3.8\times 10^{-5}\) based on various core flooding experiments on water-wet sandstone cores. This threshold value can be higher by at least one order of magnitude for mixed-wet states (Morrow et al. 1986; Humphry et al. 2014). For carbonate rocks, Tanino et al. (2015) showed the threshold occurred between \({\mathrm{Ca}}=1\times 10^{-4}\) and \(8\times 10^{-4}\) based on altered wettability limestone samples. Hence, we assume that the simulations were comparable to the experiment as they are both in a capillary dominated regime. However, another recent experimental work indicated that in mixed-wet conditions dynamic effects can occur even for a capillary number of order \(10^{-6}\) (Zou et al. 2018), hence this assumption has to be further investigated.
To evaluate how the wettability information should be incorporated into models, we designed six simulations with different assignments of contact angle for the OW, NW and WW pores. The best agreement with the experiment in terms of fluid occupancy in pores and effective permeability after water-flooding was obtained when the contact angles of the OW, NW and WW pores were set to \(150^\circ \), \(100^\circ \) and \(30^\circ \), respectively (Table 1). Note that the oil-wet pores were given an effective contact angle larger than that measured in the experiments. This angle gives a better representation of the limiting capillary pressure for water invasion across a rough surface than the pore-averaged value in equilibrium once flow has stopped.

Comparison of local fluid occupancy as a function of the pore size. a Oil saturation as a function of the pore size. b Pore-by-pore recovery factors as a function of the pore size. Based on Akai et al. (2019)
3.1.2 Fluid Distribution
In the experiment, water-flooding was performed for 20 pore volumes (PVs), and then CT images were taken 2 hours after the end of water injection to avoid fluid movement during imaging. To make a fair comparison between the experiment and simulations, in the simulation we continued water injection for 10 PVs until the change of water saturation was stabilized, then the simulations were continued with stopping water injection until the average fluid velocity in the simulation domain became 10 times lower than the original water injection velocity.
Since we observed that the fluid saturations close to the inlet and outlet buffer region were affected by the boundaries in our simulations, an area of interest (AoI) was defined by trimming 0.15 mm from both the inlet and outlet boundary in the flooding direction. This AoI accounts for 80% of the entire simulation domain. The following comparisons between the experiment and simulation were made for the AoI.
After 10 PVs of water injection, the simulated water saturation in the AoI was stabilized at 64.5%, while the experimentally obtained water saturation after 20 PVs of water injection in the AoI was 64.7%. Figure 2a shows a comparison of remaining oil after water-flooding as a function of pore size between the experiment and simulation. Oil-filled voxels after water-flooding in both the experiment and simulation were counted for each pore region and sampled for every \(5\,\upmu {\hbox {m}}\) increment of pore diameter. As shown in the figure, the simulation results are in a good agreement with the experiment. Using the initial and remaining oil saturation for each pore size, recovery factors from each pore region were evaluated as shown in Fig. 2b. In both the experiment and simulation, larger pores show a higher recovery factor. This trend is expected for an oil-wet medium where the larger pores are preferentially displaced by water (Blunt 2017) and is consistent with the fact that the measured angles showed a weakly oil-wet state.
Figure 3 shows a comparison of the fluid distribution on a voxel-by-voxel basis between the experiment and simulation. Here, 2D cross sections perpendicular to the flow direction are shown. Most large pores were properly filled in the simulation. The error in fluid placement was quantitatively evaluated. Among 1,849,485 of pore voxels within the AoI, 65% of the voxels were filled with the correct fluid in the simulation. As shown in the figure, the simulated interface was slightly diffusive. The color-gradient lattice Boltzmann model gives an interface thickness of 2–3 voxels (Yang and Boek 2013), which is about three times smaller than the smaller peak pore diameter of \(40\,\upmu \hbox {m}\) (8 voxels) shown in Fig. 1b, which corresponds to the diameter of throats, or restrictions, in the sample.

Comparison of fluid distribution on a voxel-by-voxel basis. a, b The fluid distribution in the slice at \(z=0.55\,\hbox {mm}\) (the middle slice perpendicular to the flow direction) from the experiment and simulation, respectively. Here, oil, brine and rock are shown in red, blue and gray, respectively
The 3D distributions of water and oil after water-flooding were studied. Figure 4 shows the 3D phase distributions for the simulation and experiment. The simulated oil and water distributions are similar to those obtained from the experiment. Figure 4e shows the distribution of sizes of remaining oil ganglia. Each individual remaining oil ganglion cluster was labeled, and the number of clusters was plotted as a function of their volume. In both the simulation and experiment, a single large cluster was observed, whose volume was of the order of \(10^{8}\,\upmu \hbox {m}^{3}\). Although the simulation underestimated the number of clusters for cluster sizes smaller than \(10^4\,\upmu {\hbox {m}}^3\), the volumetric contribution of these clusters is small. We consider this discrepancy is mainly caused by the insufficient resolution of the grid size used in our simulations since a few voxels are required to form the stable shape of a disconnected droplet.

Comparison of 3D fluid distributions. a, c The experimentally obtained water and oil distribution after water-flooding. b, d The simulated water and oil distribution after water-flooding. e The number of residual oil ganglion clusters is shown as a function of their size. The dotted line in the figure indicates the smallest resolvable ganglion size in our study (\(5 \times 5 \times 5\,\upmu \hbox {m}^3\))
3.1.3 Relative Permeability
Next, the relative permeability of oil and water after water-flooding was studied. Because there were no measurements of relative permeability in the experiment, we performed single-phase LB simulations on the experimentally obtained oil and water phase distribution. For a consistent comparison, single-phase LB simulations were also performed on the 3D phase distributions obtained from the two-phase LB simulations. The simulation results are summarized in Table 2. Good agreement can be seen in the water saturation and the relative permeability of water, whereas the simulation underestimates the relative permeability of oil compared to the experiment. We consider this discrepancy is caused by the insufficient resolution of the grid size in the simulation. However, both the experiment and simulation show a reasonably low, but finite, relative permeability of oil after a long period of water-flooding: There is some connected oil in both the experiment and the simulation which is confined to thin layers.
Figure 5 shows spatial distributions of the computed fluid velocity. Here, the computed absolute velocity (\(U_{\mathrm{abs}}\)) of each grid block is normalized by the average velocity (\(U_{\mathrm{avg}}\)). Figure 5c and g show histograms of \(U_{\mathrm{abs}}/U_{\mathrm{avg}}\) sampled uniformly in 200 bins of log (\(U_{\mathrm{abs}}/U_{\mathrm{avg}}\)). For the computed velocity distributions of the water phase, the simulation gives good agreement in both the spatial distribution of the water pathways and the histogram of the fluid velocity. For the computed velocity of the oil phase, although an exact match for the oil flow pathways is not obtained, it can be seen that in both the experiment and the simulation oil flow is confined to thin layers, as expected after a long period of water-flooding in a mixed-wet or oil-wet medium.

Comparison of 3D fluid velocity distributions after water-flooding. a, b The spatial distributions of water velocity obtained from the water phase distribution from the experiment and simulation, respectively. d, e The spatial distributions of oil velocity obtained from the oil phase distribution of the experiment and simulation, respectively. c, f Histograms of the normalized voxel velocity \(U_{\mathrm{abs}}/U_{\mathrm{avg}}\) sampled uniformly in 200 bins of \(\log {(U_{\mathrm{abs}}/U_{\mathrm{avg}})}\)
To further understand the thin oil layers observed in both the experiment and simulation, fluid occupancy was studied as a function of distance from the pore walls. The distance from each pore voxel to the nearest pore wall voxel was calculated for all pore voxels, Fig. 6. Using this distance map, the number of oil- and water-filled voxels after water-flooding were counted and sampled for every \(5\,\upmu {\hbox {m}}\) increment. The number of oil-filled voxels was also normalized by the total number of voxels which belong to each distance increment.
As shown in Fig. 6b, a good agreement between the experiment and simulation can be seen for the water phase, while the simulation tends to place more oil away from pore walls compared to the experiment. This means that in the experiment, the oil was more confined to thinner layers close to pore walls compared to the simulation. Nevertheless, the trends observed for the experiment and simulation are similar—40 to 50% of fluid voxels immediately adjacent to the solid are occupied with oil. In addition, we observe that the number of oil-filled voxels decreases as the distance from pore walls increases and for voxels whose distance from pore walls are longer than \(30\,\upmu {\hbox {m}}\), which is a center of a relatively large pore, most voxels (\(>\,90 \%\)) are occupied with water.
In both the experiment and the simulation, these thin oil layers confined to pore walls maintained good connectivity of oil and contributed to the formation of large spanning oil clusters as shown in Fig. 4e, resulting in small, but finite oil relative permeability after a long period of water-flooding.

Fluid occupancy as a function of distance from pore walls. a Distance map in the slice at \(z=0.45\,{\hbox {mm}}\). b Number of oil- and water-filled voxels as a function of distance from pore walls. c Oil-filled voxels normalized by the total number of voxels as a function of distance
3.2 Simulations for Enhanced Oil Recovery Cases
3.2.1 Case Descriptions
Low salinity water-flooding (LSWF) is an enhanced oil recovery (EOR) method in which brine with lower salinity than that of formation brine is injected into a formation. Tang and Morrow (1999) reported an increase in the recovery of crude oil with a decrease in salinity based on numerous water-flooding experiments conducted on Berea sandstone samples. After their work, an increase in the oil recovery for carbonate rocks by low salinity water injection was also reported (Jackson et al. 2016; Alhammadi et al. 2018b). Although the underlying mechanisms of additional oil recovery by low salinity water injection are poorly understood, the change of wettability toward more water-wet states by injection of low salinity water seems to be the most accepted cause of the observed increase in oil recovery (Morrow and Buckley 2011; Sheng 2014; Mahani et al. 2015; Bartels et al. 2017).
To address this hypothesis, two cases (LSWF1 and LSWF2) were designed by changing the contact angles of the rock surfaces (See Table 3). In LSWF1, the contact angles of neutrally-wet pores, accounting for 63.4% of pore volume, were changed from \(100^\circ \) to \(80^\circ \), while in LSWF2, the contact angle of both oil-wet and neutrally-wet pores were changed to \(80^\circ \).
Surfactant flooding (SF) is a chemical EOR process in which a surface-active agent (surfactant) is injected. Although surfactants have a larger role in enhanced oil recovery than just lowering interfacial tension, by for instance changing wettability, promoting emulsification and lowering bulk-phase viscosity (Lake 1989), here we only focus on the impact of lowering interfacial tension on oil recovery. The impact of interfacial tension on the trapping of oil is best described as a competition between viscous and capillary forces and understood thorough a capillary desaturation curve (CDC) (Lake 1989). Considering a typical CDC in which a sudden drop in residual phase saturation is seen at a critical capillary number of around \(10^{-4}\), the interfacial tension has to be reduced from typical values of 20 to 30 mN/m to ultralow values in the range of 0.001–0.01 mN/m (Hirasaki et al. 2011). This corresponds to an increase in the capillary number from a typical field value of \({\mathrm{Ca}}=10^{-7}\) to \(10^{-4}-10^{-3}\).
These conditions could be achieved using petroleum-sulfonate/alcohol mixtures (Hill et al. 1973; Foster 1973; Cayias et al. 1977). In our simulations, two surfactant flooding cases (SF1 and SF2) were designed by reducing the oil–water interfacial tension by a factor of 10 and 100 to achieve \({\mathrm{Ca}}=3.3 \times 10^{-4}\) and \({\mathrm{Ca}}=3.3 \times 10^{-3}\), respectively (see Table 3).
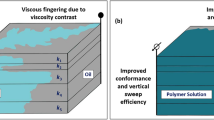
Polymer flooding (PF) consists of adding polymer to the injected water to decrease its mobility. Generally, polymer flooding works well when a reservoir has an unfavorable mobility ratio and high heterogeneity. In this situation, viscous fingering of injected water happens both at the field-scale and at the pore-scale (Lake 1989).
A polymer flooding (PF1) case was designed by increasing the viscosity of the injection water to that of oil, to make the viscosity ratio \(M=1\). According to Eq. 7, increasing the viscosity of water while keeping the same injection velocity results in an increase in the capillary number. However, in a practical application of polymer flooding, the injectivity of water decreases because of the increase in viscosity. Therefore, an additional case was considered by reducing the oil viscosity, to make the viscosity ratio \(M=1\). This case retains the same capillary number as in the base case and will be called PF2 (see Table 3).
3.2.2 Simulation Results for the Enhanced Oil Recovery Cases
All the cases were performed in a secondary mode—that is, injection into the initial oil saturation—until 5 PVs of water injection. The evolution of recovery factor as a function of pore volumes of water injected is shown in Fig. 7. A summary of the recovery factors at 2 and 5 PVs of water injection is summarized in Table 4.

Comparison of the recovery factors for EOR cases as a function of pore volumes of water injected. a Low salinity water-flooding cases. b Surfactant flooding cases. c Polymer flooding cases. For a description of each case, see Table 3
For the low salinity water-flooding cases, slightly modifying the wettability of NW pores from a weakly oil-wet to a weakly water-wet state (LSWF1) resulted in a modest increase of recovery factor by 2% after 5 PVs of water injection. Further modifying the wettability of OW pores to a weakly water-wet state (LSWF2) resulted in an increase of recovery factor by 8%. As we can see from Fig. 7, the rate of oil recovery in LSWF2 was much faster than in the base case. Figure 8 shows the location of remaining oil as a function of the pore size (a) and the distance from pore walls (b, c). In LSWF1, a slight decrease in remaining oil for pore diameters smaller than \(40\,\upmu {\hbox {m}}\) can be seen, while, in LSWF2, a clear decrease in remaining oil can be observed for small to medium sized pores with an increase in remaining oil saturation for large pores. Figure 8b, c shows that the amount of filling close to the solid (in layers) decreases and the amount of oil away from pore walls increases as the solid becomes more water-wet. More favorable displacement of oil from the centers of pore spaces without leaving oil layers behind in the low salinity flooding cases leads to better oil recovery, consistent with a water-wet medium.

Comparison of the location of remaining oil for low salinity water-flooding cases as a function of pore size (a) and as a function of distance from pore walls b and c. For a description of each case, see Table 3
Surfactant flooding showed a significant increase in recovery factor by 12% for SF1 and 16% for SF2. Increasing the capillary number to \(10^{-4} \sim 10^{-3}\) removes trapped oil by viscous forces. Figure 9 shows the location of remaining oil. Most pore sizes show lower remaining oil compared to the base case. As shown in Fig. 9b, c, the remaining oil for SF still mostly exists in voxels close to pore walls as confined oil layers. Figure 10 shows the number of remaining oil ganglion clusters as a function of their size. The largest oil cluster with a size greater than \(10^{8}\,\upmu \,{\hbox {m}}^{3}\) observed in the base case is not seen in both SF1 and SF2, while these cases show more small clusters. This indicates that as the capillary number increases, the size of remaining oil ganglia becomes smaller. This trend is consistent with the experimental results of Pak et al. (2015). They observed break-up of oil ganglia as the capillary number increased in their water-flooding experiments conducted on a water-wet carbonate. However, the appearance of remaining oil ganglia in our results was different: Pak et al. (2015) observed approximately spherical fragmented oil droplets for their water-wet experiments, while we observed thin oil layers for mixed-wet state simulations as indicated by the higher oil occupancy close to the pore walls for SF1 and SF2 (Fig. 9c).

Comparison of the location of remaining oil for surfactant flooding cases as a function of pore size (a) and as a function of distance from pore walls b and c. For a description of each case, see Table 3

Number of remaining oil ganglion clusters for surfactant flooding cases. Here, the vertical dotted line indicates the smallest resolvable ganglion size in our study (\(5 \times 5 \times 5\,\upmu \hbox {m}^3\)). For a description of each case, see Table 3
PF1 showed a significant increase in the recovery factor by 15%. However, PF2 did not show an increase in oil recovery. Judging from the fact that the remaining oil was located in a similar place to that of SF1 as shown in Fig. 11, we consider the increase in recovery in PF1 is mainly caused by the increase in capillary number rather than the improvement in viscosity ratio. From a comparison between the base case and PF2, this level of viscosity ratio (\(M=5\)) does not cause unfavorable viscous fingering at the pore scale at a capillary number of \({\mathrm{Ca}} \sim 10^{-5}\). This is consistent with the fact that the experimental condition of Ca and M falls in the capillary fingering regime in Lenormand’s phase diagram rather than in the viscous fingering regime (Lenormand et al. 1988). Nevertheless, viscosity ratio can have an impact on microscopic displacement efficiency if the capillary number becomes higher. When we compare PF1 and SF1, a higher recovery factor was obtained with PF1 although its capillary number is lower than that in SF1, because viscous forces start to take effect at a capillary number of \(10^{-4}\); the more favorable viscosity ratio in PF1 gave better recovery than that in SF1 despite the lower capillary number.
The comparison between the base case and PF2 gives an additional insight into the experiments of Alhammadi et al. (2017). As described in Sect. 2.2, they conducted water-flooding experiments using three small carbonate core plugs conditioned to different wettability states. The highest recovery factor of 84% was observed for a neutrally-wet sample with a mean value of measured contact angles of \(94^\circ \), while the oil-wet sample with a mean angle of \(104^\circ \), which is the sample discussed in this study, showed a much lower recovery factor of 55%. These experiments were performed with different sets of oil and brine systems, resulting in oil/brine viscosity ratios of \(M=0.8\) and \(M=5.64\), respectively. The obvious question is whether the higher recovery factor in a neutrally-wet sample was caused by the wettability state or the favorable viscosity ratio. From the fact that the simulation performed with \(M=1\) for the oil-wet sample did not show an increase in oil recovery, we consider that the difference in recovery was mainly caused by wettability.

Comparison of the location of remaining oil for polymer flooding cases as a function of pore size a and as a function of distance from pore walls b and c. For a description of each case, see Table 3
4 Discussion and Conclusions
We have established a methodology that calibrates a multiphase flow DNS model to experiments and employs it to obtain predictions for enhanced oil recovery.
To calibrate the model, we have presented comparisons of water-flooding in a mixed-wet carbonate sample taken from a producing oil reservoir between experiment and simulation. In both the experiment and simulation, larger pores showed a higher oil recovery and most remaining oil existed close to the pore walls. This is expected for a mixed-wet medium and it is consistent with the experimentally measured contact angles for this sample.
The simulation showed good agreement in fluid occupancy as a function of the pore size and provided an accurate prediction of the relative permeability of water after water-flooding, whereas the relative permeability of oil phase was underestimated. We consider this discrepancy is mainly caused by the insufficient resolution of the grid size in the simulation. Nevertheless, both the experiment and simulation have shown a reasonably low, but finite, effective oil permeability after water-flooding through thin connected oil layers.
We have used a well-calibrated direct numerical simulation model to study EOR applications in this sample. Taking the simulation model as a base case, we have investigated three EOR processes: low salinity water-flooding, surfactant flooding and polymer flooding.
Low salinity water-flooding has been studied by changing the wettability of the pore walls from that obtained in the base case. When the wettability of most pore walls was changed to a weakly water-wet state (\(\theta =80^\circ \)) from an original oil-wet state, the recovery factor increased by 8%. However, when the wettaiblity of only neutrally-wet pores was changed to a weakly water-wet state, the increase was much more modest—only 2%. Our simulation results could help interpret mechanisms of low salinity water-flooding through comparison with core flooding experiments. The simulated results suggest that the increase in oil recovery by low salinity water-flooding is made by favoring displacement of oil from the centers of pores without leaving oil layers behind.
Surfactant flooding has been studied by reducing the interfacial tension in the base case. This showed an increase of 16% in recovery factor. As expected, reducing interfacial tension has a significant impact on microscopic displacement efficiency. In mixed-wet rocks, the size of the remaining oil clusters became smaller for the surfactant flooding cases.
Polymer flooding has been studied by changing the viscosity ratio between water and oil. It did not show an increase in oil recovery as long as the capillary number was kept the same as in the base case. It seems that this level of viscosity ratio (\(M = 5\)) does not have a negative impact on microscopic displacement efficiency in this rock sample at a capillary number of \(10^{-5}\). However, at a capillary number of \(10^{-4}\), the simulation results suggested that polymer flooding improved microscopic displacement efficiency because viscous forces start to take effect. These insights into microscopic displacement efficiency need to be considered in addition to macroscopic sweep efficiency caused by heterogeneity at the reservoir scale. Furthermore, the comparison between the base case and PF2, in which only the viscosity ratio was changed while retaining the same capillary number as in the base case, suggested that the difference in recovery factor observed in the experiments of Alhammadi et al. (2017) was mainly caused by wettability.
Although these EOR schemes are often performed in tertiary mode flooding in field applications, i.e., EOR fluids are injected after water-flooding, our simulations for EOR applications have been performed in secondary mode. From the view point of numerical modeling, for tertiary flooding, the advection and diffusion of injected components as an EOR agent need to be solved with the two-phase Navier–Stokes equation. We are now developing a direct numerical simulation model for such cases. Although the impact of the three EOR processes obtained with tertiary mode flooding could be smaller compared to those obtained for secondary flooding, the results presented in this study help interpret such cases.
In summary, we have presented a comprehensive workflow for pore-scale modeling from experiments to simulation. In this workflow, micro-CT-based experimental data are incorporated into direct numerical simulation models to calibrate the model, then the model is used to better understand how EOR applications affect microscopic displacement efficiency.
References
Akai, T., Bijeljic, B., Blunt, M.J.: Wetting boundary condition for the color-gradient lattice Boltzmann method: validation with analytical and experimental data. Adv. Water Resour. 116, 56–66 (2018). https://doi.org/10.1016/j.advwatres.2018.03.014
Akai, T., Alhammadi, A.M., Blunt, M.J., Bijeljic, B.: Modeling oil recovery in mixed-wet rocks: pore-scale comparison between experiment and simulation. Transp. Porous Media 127(2), 393–414 (2019). https://doi.org/10.1007/s11242-018-1198-8
Alhammadi, A.M., AlRatrout, A., Singh, K., Bijeljic, B., Blunt, M.J.: In situ characterization of mixed-wettability in a reservoir rock at subsurface conditions. Sci. Rep. 7(1), 10753 (2017). https://doi.org/10.1038/s41598-017-10992-w
Alhammadi, A., Alratrout, A., Bijeljic, B., Blunt, M.: X-ray micro-tomography datasets of mixed-wet carbonate reservoir rocks for in situ effective contact angle measurements (2018a). https://doi.org/10.17612/P7VQ2G
Alhammadi, M., Mahzari, P., Sohrabi, M.: Fundamental investigation of underlying mechanisms behind improved oil recovery by low salinity water injection in carbonate rocks. Fuel 220, 345–357 (2018b). https://doi.org/10.1016/j.fuel.2018.01.136
AlRatrout, A., Raeini, A.Q., Bijeljic, B., Blunt, M.J.: Automatic measurement of contact angle in pore-space images. Adv. Water Resour. 109, 158–169 (2017). https://doi.org/10.1016/j.advwatres.2017.07.018
Bartels, W.B., Mahani, H., Berg, S., Menezes, R., van der Hoeven, J.A., Fadili, A.: Oil configuration under high-salinity and low-salinity conditions at pore scale: a parametric investigation by use of a single-channel micromodel. SPE J. 22(05), 1362–1373 (2017). https://doi.org/10.2118/181386-PA
Blunt, M.J.: Flow in porous media pore-network models and multiphase flow. Curr. Opin. Colloid Interface Sci. 6(3), 197–207 (2001). https://doi.org/10.1016/S1359-0294(01)00084-X
Blunt, M.J.: Multiphase Flow in Permeable Media: A Pore-scale Perspective. Cambridge University Press, Cambridge (2017)
Boek, E.S., Zacharoudiou, I., Gray, F., Shah, S.M., Crawshaw, J.P., Yang, J.: Multiphase-flow and reactive-transport validation studies at the pore scale by use of lattice Boltzmann computer simulations. SPE J. 22(03), 0940–0949 (2017). https://doi.org/10.2118/170941-PA
Brackbill, J., Kothe, D., Zemach, C.: A continuum method for modeling surface tension. J. Comput. Phys. 100(2), 335–354 (1992). https://doi.org/10.1016/0021-9991(92)90240-Y
Buckley, J., Liu, Y., Monsterleet, S.: Mechanisms of wetting alteration by crude oils. SPE J. 3(01), 54–61 (1998). https://doi.org/10.2118/37230-PA
Cayias, J., Schechter, R., Wade, W.: The utilization of petroleum sulfonates for producing low interfacial tensions between hydrocarbons and water. J. Colloid Interface Sci. 59(1), 31–38 (1977). https://doi.org/10.1016/0021-9797(77)90335-6
Chatzis, I., Morrow, N.R.: Correlation of capillary number relationships for sandstone. Soc. Pet. Eng. J. 24(05), 555–562 (1984). https://doi.org/10.2118/10114-PA
D’Humieres, D., Ginzburg, I., Krafczyk, M., Lallemand, P., Luo, L.S.: Multiple-relaxation-time lattice Boltzmann models in three dimensions. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 360(1792), 437–451 (2002). https://doi.org/10.1098/rsta.2001.0955
Foster, W.: A low-tension waterflooding process. J. Pet. Technol. 25(02), 205–210 (1973). https://doi.org/10.2118/3803-PA
Guo, Z., Zheng, C., Shi, B.: Discrete lattice effects on the forcing term in the lattice Boltzmann method. Phys. Rev. E 65(4), 046308 (2002). https://doi.org/10.1103/PhysRevE.65.046308
Halliday, I., Hollis, A.P., Care, C.M.: Lattice Boltzmann algorithm for continuum multicomponent flow. Phys. Rev. E 76(2), 026708 (2007). https://doi.org/10.1103/PhysRevE.76.026708
Hill, H., Reisberg, J., Stegemeier, G.: Aqueous surfactant systems for oil recovery. J. Pet. Technol. 25(02), 186–194 (1973). https://doi.org/10.2118/3798-PA
Hirasaki, G., Miller, C.A., Puerto, M.: Recent advances in surfactant EOR. SPE J. 16(04), 889–907 (2011). https://doi.org/10.2118/115386-PA
Humphry, K.J., Suijkerbuijk, B.M.J.M., van der Linde, H.A., Pieterse, S.G.J., Masalmeh, S.K.: Impact of wettability on residual oil saturation and capillary desaturation curves. Petrophysics 55(4), 313–318 (2014)
Jackson, M.D., Al-Mahrouqi, D., Vinogradov, J.: Zeta potential in oil–water–carbonate systems and its impact on oil recovery during controlled salinity water-flooding. Sci. Rep. 6(1), 37363 (2016). https://doi.org/10.1038/srep37363
Jerauld, G.R., Fredrich, J., Lane, N., Sheng, Q., Crouse, B., Freed, D.M., Fager, A., Xu, R.: Validation of a workflow for digitally measuring relative permeability. In: Abu Dhabi International Petroleum Exhibition and Conference, Society of Petroleum Engineers (2017). https://doi.org/10.2118/188688-MS
Kimbrel, E.H., Herring, A.L., Armstrong, R.T., Lunati, I., Bay, B.K., Wildenschild, D.: Experimental characterization of nonwetting phase trapping and implications for geologic CO\(_{2}\) sequestration. Int. J. Greenh. Gas Control 42, 1–15 (2015). https://doi.org/10.1016/j.ijggc.2015.07.011
Krüger, T., Kusumaatmaja, H., Kuzmin, A., Shardt, O., Silva, G., Viggen, E.M.: The Lattice Boltzmann Method, pp. 973–978. Springer International Publishing, Berlin (2017)
Lake, L.W.: Enhanced Oil Recovery. Prentice Hall, Englewood Cliffs (1989)
Leclaire, S., Parmigiani, A., Malaspinas, O., Chopard, B., Latt, J.: Generalized three-dimensional lattice Boltzmann color-gradient method for immiscible two-phase pore-scale imbibition and drainage in porous media. Phys. Rev. E 95(3), 033306 (2017). https://doi.org/10.1103/PhysRevE.95.033306
Lenormand, R., Touboul, E., Zarcone, C.: Numerical models and experiments on immiscible displacements in porous media. J. Fluid Mech. 189, 165–187 (1988). https://doi.org/10.1017/S0022112088000953
Mahani, H., Berg, S., Ilic, D., Bartels, W.B., Joekar-Niasar, V.: Kinetics of low-salinity-flooding effect. SPE J. 20(01), 008–020 (2015). https://doi.org/10.2118/165255-PA
Morrow, N., Buckley, J.: Improved oil recovery by low-salinity waterflooding. J. Pet. Technol. 63(05), 106–112 (2011). https://doi.org/10.2118/129421-JPT
Morrow, N.R., Lim, H.T., Ward, J.S.: Effect of crude-oil-induced wettability changes on oil recovery. SPE Form. Eval. 1(01), 89–103 (1986). https://doi.org/10.2118/13215-PA
Pak, T., Butler, I.B., Geiger, S., van Dijke, M.I.J., Sorbie, K.S.: Droplet fragmentation: 3D imaging of a previously unidentified pore-scale process during multiphase flow in porous media. Proc. Natl. Acad. Sci. 112(7), 1947–1952 (2015). https://doi.org/10.1073/pnas.1420202112
Pan, C., Hilpert, M., Miller, C.T.: Lattice-Boltzmann simulation of two-phase flow in porous media. Water Resour. Res. 40(1), 1–14 (2004). https://doi.org/10.1029/2003WR002120
Porter, M.L., Wildenschild, D., Grant, G., Gerhard, J.I.: Measurement and prediction of the relationship between capillary pressure, saturation, and interfacial area in a NAPL-water-glass bead system. Water Resour. Res. 46(8), 1–10 (2010). https://doi.org/10.1029/2009WR007786
Qian, Y.H., D’Humières, D., Lallemand, P.: Lattice BGK models for Navier–Stokes equation. EPL (Europhys. Lett.) 17(6), 479 (1992)
Raeini, A.Q., Blunt, M.J., Bijeljic, B.: Direct simulations of two-phase flow on micro-CT images of porous media and upscaling of pore-scale forces. Adv. Water Resour. 74, 116–126 (2014). https://doi.org/10.1016/j.advwatres.2014.08.012
Raeini, A.Q., Bijeljic, B., Blunt, M.J.: Modelling capillary trapping using finite-volume simulation of two-phase flow directly on micro-CT images. Adv. Water Resour. 83, 102–110 (2015). https://doi.org/10.1016/j.advwatres.2015.05.008
Ramstad, T., Idowu, N., Nardi, C., Øren, P.E.: Relative permeability calculations from two-phase flow simulations directly on digital images of porous rocks. Transp. Porous Media 94(2), 487–504 (2012). https://doi.org/10.1007/s11242-011-9877-8
Sheng, J.: Critical review of low-salinity waterflooding. J. Pet. Sci. Eng. 120, 216–224 (2014). https://doi.org/10.1016/j.petrol.2014.05.026
Tang, G.Q., Morrow, N.R.: Influence of brine composition and fines migration on crude oil/brine/rock interactions and oil recovery. J. Pet. Sci. Eng. 24(2–4), 99–111 (1999). https://doi.org/10.1016/S0920-4105(99)00034-0
Tanino, Y., Akamairo, B., Christensen, M., Bowden, SA.: Impact of displacement rate on waterflood oil recovery under mixed-wet conditions. In: International Symposium of the Society of Core Analysts, pp. 1–10 (2015)
Yang, J., Boek, E.S.: A comparison study of multi-component Lattice Boltzmann models for flow in porous media applications. Comput. Math. Appl. 65(6), 882–890 (2013). https://doi.org/10.1016/j.camwa.2012.11.022
Zou, Q., He, X.: On pressure and velocity boundary conditions for the lattice Boltzmann BGK model. Phys. Fluids 9(6), 1591–1598 (1997). https://doi.org/10.1063/1.869307
Zou, S., Armstrong, R.T., Arns, J.Y.Y., Arns, C.H., Hussain, F.: Experimental and theoretical evidence for increased ganglion dynamics during fractional flow in mixed-wet porous media. Water Resour. Res. 54(5), 3277–3289 (2018). https://doi.org/10.1029/2017WR022433
Zubair, M.: Digital rock physics for fast and accurate special core analysis in carbonates. In: New Technologies in the Oil and Gas Industry. InTech (2012). https://doi.org/10.5772/52949
Acknowledgements
We thank Japan Oil, Gas and Metals National Corporation (JOGMEC) for their financial support. We also thank Abu Dhabi National Oil Company (ADNOC) and ADNOC Onshore (previously known as Abu Dhabi Company for Onshore Petroleum Operations Ltd) for sharing the experimental data used in this work. We thank the anonymous reviewers for their constructive comments. The experimental data used here are available at Alhammadi et al. (2018a).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Akai, T., Alhammadi, A.M., Blunt, M.J. et al. Mechanisms of Microscopic Displacement During Enhanced Oil Recovery in Mixed-Wet Rocks Revealed Using Direct Numerical Simulation. Transp Porous Med 130, 731–749 (2019). https://doi.org/10.1007/s11242-019-01336-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11242-019-01336-5