
Abstract
The aim of this paper is to present a topological method for constructing discretizations (tessellations) of topological conceptual spaces. The method works for a class of topological spaces that the Russian mathematician Pavel Alexandroff defined more than 80 years ago. The aim of this paper is to show that Alexandroff spaces, as they are called today, have many interesting properties that can be used to explicate and clarify a variety of problems in philosophy, cognitive science, and related disciplines. For instance, recently, Ian Rumfitt used a special type of Alexandroff spaces to elucidate the logic of vague concepts in a new way. Moreover, Rumfitt’s class of Alexandroff spaces can be shown to provide a natural topological semantics for Susanne Bobzien’s “logic of clearness”. Mainly due to the work of Peter Gärdenfors and his collaborators, conceptual spaces have become an increasingly popular tool of dealing with a variety of problems in the fields of cognitive psychology, artificial intelligence, linguistics and philosophy. For Gärdenfors’s conceptual spaces, geometrically defined discretizations (so-called Voronoi tessellations) play an essential role. These tessellations can be shown to be extensionally equivalent to topological tessellations that can be constructed for Alexandroff spaces in general. Thereby, Rumfitt’s and Gärdenfors’s constructions turn out to be special cases of an approach that works for a more general class of spaces, namely, for weakly scattered Alexandroff spaces. The main aim of this paper is to show that this class of spaces provides a convenient framework for conceptual spaces as used in epistemology and related disciplines in general. Weakly scattered Alexandroff spaces are useful for elucidating problems related to the logic of vague concepts, in particular they offer a solution of the Sorites paradox (Rumfitt). Further, they provide a semantics for the logic of clearness (Bobzien) that overcomes certain problems of the concept of higher-order vagueness. Moreover, these spaces help find a natural place for classical syllogistics in the framework of conceptual spaces. The specialization order of Alexandroff spaces can be used to refine the all-or-nothing distinction between prototypical and non-prototypical stimuli in favor of a gradual distinction between more or less prototypical elements of conceptual spaces. The greater conceptual flexibility of the topological approach helps avoid some inherent inadequacies of the geometrical approach, for instance, the so-called “thickness problem”. Finally, it is shown that the Alexandroff spaces offer an appropriate framework to deal with digital conceptual spaces that are gaining more and more importance in the areas of artificial intelligence, computer science and related disciplines.
Similar content being viewed by others


Notes
Complete atomic Boolean algebras are isomorphic to 2L, where 2L is the power set of a set L.
For some interesting recent work on the role of prototypes in the theory of conceptual spaces see Douven and Gärdenfors (2019). Recent applications of the theory of conceptual spaces in linguistics, cognitive science and philosophy may be found in Zenker and Gärdenfors (2015), and Kaipainen et al. (2019).
This move does not solve, of course, the problem of determining the topology of the conceptual space in question. But at least, for the “conceptual engineer”, i.e., the scientist who is in charge to design appropriately structured conceptual spaces, the task of designing a topological structure is less demanding than to determine the full metrical structure of a conceptual space. After all, the topological structure is fully determined by the metrical structure. Moreover, it may be that a conceptual space has no metrical structure at all.
For a fuller account of a “design theory” of conceptual spaces, see Douven and Gärdenfors (2019) and some remarks in section 5 of this paper.
Thus, the topological approach and the geometrical approach of conceptual spaces should not be considered as incompatible alternatives. Rather, both the geometrical approach (based on the concept of convexity) and the topological approach should be considered as having a common conceptual root, namely, the concept of a general closure operator. In a formally precise way this is explained in “Appendix A”. This generalized perspective on the task of how to represent experience in appropriately structure conceptual spaces should not be considered as an idle attempt of generalizing for the sake of generalizing. Rather, it should be taken as a proposal to find an adequate general framework for the task of presenting possible experiences in a rich and flexible way.
With some good will, the “attribute spaces“, introduced by Carnap long ago, may be considered as forerunners of conceptual spaces in Gärdenfors’s sense [cf. Carnap (1971)]. In contrast to attribute spaces, regions of conceptual spaces that correspond to concepts are non-homogeneous in the sense that some (generating) points are more prototypical than others. While Rumfitt and Gärdenfors assume a strict dichotomy between prototypical and non-prototypical elements, this paper shows how to define a gradual distinction between more or less prototypical (central) elements of a conceptual space. This is done by using the so-called “specialization order” that is characteristic for Alexandroff spaces. More precisely, in the framework of Alexandroff spaces, prototypical elements are characterized as maximal elements of the specialization (quasi-)order, while all other elements have a more or less high degree specialization (prototypicality).
For a more detailed comparison of the similarities and differences of Carnap’s and Gärdenfors’s approaches, see Sznajder (2016, section 6).
From an abstract point of view, topological structures and convex structures are not unrelated to each other: Both may be mathematically characterized as closure structures [cf. van de Vel (1993)].
All terms defined in the "Appendix" are underlined when they are used for the first time in the main text.
The Hausdorff separation axiom for topological spaces requires that two distinct points x and y of the space have disjoint open neighborhoods U(x) and U(y), or, in other words, that x and y can be separated from each other topologically. Many of the familiar topological spaces such as Euclidean spaces, and, more generally, metrical spaces satisfy the Hausdorff axiom. For a precise definition of the axiom and other separation axioms, see A11.
Since this structure is very important for the rest of this paper, it may be expedient to give a preliminary informal description just now. Given a topological space (X, OX), the elements a ∈ OX may be interpreted as properties that the elements x ∈ X may or may not possess (“x has the property a” iff x ∈ a). Then an element x may be defined as “more special”, “more central” or “more typical” than an element y (denoted by y ≤ x) iff x has at least as many properties as y. In many papers dealing with conceptual spaces such a (quasi-)order of specialization is implicit assumed when geometrical illustrations by Venn-like diagrams are used to distinguish between central and not-so-central cases of concepts. See, for instance, the “bird space” where “penguin” occupies a less central position than “robin” (Osta-Vélez and Gärdenfors (2020, p. 6)).
As will be explained later, this order structure is based on the topological structure of X, it is called the specialization quasi-order of the topological space (X, OX) and denoted by (X, ≤). A precise topological definition of (X, ≤) is given in A6.
Ageometrikos maedeis eisito: Let no one untrained in geometry enter.
The function m need not be defined with the aid of a full-fledged metric on X as Gärdenfors seems to assume.
Cut down to its bones, the topological core of Rumfitt’s solution of the Sorites paradox consists in exploiting the peculiar properties of topologically defined regular open interpretations of Boolean logic. The details are as follows. Let O*X be the Boolean algebra of regular open sets of (X, OX). A regular open interpretation of a propositional language L (with propositional variables a, b, …, and the Boolean connectives ∧, ∨, …) in O*X is a map L—r → O*X such that
$$\left( {\text{i}} \right)\quad {\text{ r}}({\text{a}} \wedge {\text{b}}) \, : = {\text{r}}\left( {\text{a}} \right) \cap {\text{r}}\left( {\text{b}} \right),\quad \left( {\text{ii}} \right)\quad {\text{ r}}({\text{a}} \vee {\text{b}}) \, : = {\text{int}}({\text{cl}}({\text{r}}\left( {\text{a}} \right) \cup {\text{r}}\left( {\text{b}} \right)),\quad {\text{and}}\quad \left( {\text{iii}} \right)\quad {\text{ r}}(\neg {\text{a}}): = {\text{int}}{\mathbf{C}}{\text{r}}\left( {\text{a}} \right).$$The crucial feature of a regular open interpretation is that it yields a semantic of classical Boolean logic that may render a disjunction a ∨ b true in X without implying that for all x ∈ X either a or b is true at x. The underlying topological fact is simply that for a regular open interpretation r a disjunction a ∨ b of a and b has the interpretation int(cl(r(a) ∪ r(b)). This set may be strictly larger than the union r(a) ∪ r(b) of the disjuncts r(a) and r(b). This fact may be used to cope with the Sorites paradox, see Rumfitt (2015, p. 253) or Mormann (2020, Section 5). As it seems, Rumfitt assumes that the topological product of polar spaces is again a polar space. This is, as can be easily shown, not correct. An elementary example is the Khalimsky plane. This space is the Cartesian product of two polar spaces but not a polar space itself, see (2.10), (2.11), and (A.12)(iv). Rumfitt’s arguments are not affected by this slight inaccuracy, however. Be this as it may, the approach of the present paper has no difficulty of dealing with products of polar spaces, see (2.8)ff.
Not all weakly scattered spaces are Alexandroff, of course. See “Appendix B”.
An elementary example is given by the real line (R, OR): For the set of rational numbers Q one obtains bd(bd(Q)) = Ø and bd(Q) = R.
The task of finding out what are the digital counterparts of various kinds of continuous phenomena (if there are any), may be highly non-trivial. An early classical result in this field is the digital Jordan curve theorem according to which a continuous curve of a digital circle defines a tessellation of the digital plane in two parts.
This paper is, of course, not the appropriate place to deal with digital topology and its many applications in any greater depth. The literature on digital topology is immense. Here, it must suffice to mention just some introductory texts, e.g., Rosenfeld (1979), Kovalevsky (2006), Kong et al. (1991), and Melin (2008, 2009).
Already Gärdenfors in his geometrical account of conceptual spaces uses the possibility of constructing new conceptual spaces from products (or quotients) of already given conceptual spaces (cf. Gärdenfors (2000)). Likewise, Rumfitt uses finite products of the color spectrum to deal with the Sorites. These products are WSA spaces, not polar spaces [cf. Rumfitt (2015, Ch.8)].
It should be observed that the supremum VAλ is to be taken in O*X. Thus, it may be strictly larger than the set-theoretical union UAλ of the Aλ.
As will be shown in a moment, the tessellation (3.2)(ii) is closely related to the construction of the digital line (Z, 0Z).
A prominent case is provided by the family of Minkowski metrics di(x, y) for 1 ≤ i ≤ ∞. This problem is briefly discussed for d1 (Manhattan metric) and d2 (Euclidean metric) in Gärdenfors (2000, chapter 3.9). The Euclidean metric d2 offers a structural advantage in that the cells of its Voronoi tessellations are always convex with respect to the standard convex structure of Euclidean space. This does not hold for d1 (cf. Hernández Conde 2017).
According to theorem (4.2), for O*X to be an atomic Boolean lattice, it suffices that (X, OX) is Alexandroff and weakly scattered. These two requirements are, however, not necessary to ensure that O*X is atomic. There are non-weakly scattered Alexandroff spaces and non-Alexandroff weakly scattered spaces with regular open atomic tessellations O*X, see “Appendix B”.
The fact that negations, disjunctions and other familiar combinations of concepts can be represented naturally in a topological framework should perhaps not be taken as the ultimate and definite argument that “not red”, “red or blue or green” are natural concepts in exactly the same sense as “red”, “blue”, and “green”. But for every even minimally useful calculus of concepts negations and disjunctions of concepts are indispensable. An example treated in this paper in some detail is Rumfitt’s solution of the Sorites paradox dealing with “non-red” etc. Thus, a theory of concepts that does not deal with the issue of logical connectives has to give explicit reason why it does so. Otherwise, it is to be assessed as seriously incomplete. In sum, I’d tend to answer the question (asked by a reviewer of an earlier version of this paper) whether the fact that Gärdenfors’s account of conceptual spaces does not deal with negative, disjunctive and other combinations of concepts is to be judged “as a bug or a feature” in favor of the first option.
As stated already in the introduction, such a gradual distinction has been assumed often more or less implicitly by many authors, nice examples can be found in the recent paper Osta-Vélez and Gärdenfors (2020).
A set may be open and closed. For instance, the sets Ø and X are open and closed for all topological structures (X, OX). Sets that are open and closed, are sometimes called clopen. A topological space is called connected iff Ø and X are the only clopen subsets of X.
Indeed, all convexity operators that Gärdenfors considers in contributions to the approach of conceptual spaces are of arity 2. More precisely, his basic primitive concept is a ternary relation B(x, y, z) of elements x, y, and z of a conceptual space X. The relation B(x, y, z) is to be read as “y is between x and z”. For any two points x and z the relation B defines a subset [x, z] of elements between x and z, i.e., [x, z] : = {y; B(x, y, z)}. Then a set A ⊆ X is convex with respect to B iff x, z ∈ A entails [x, z] ⊆ A. This defines a convex closure operator co for which A.3(5) is just the requirement that y ∈ A iff there are x, z ∈ A and such that y ∈ B(x, y, z).
The standard convex operators of Euclidean spaces and the topological operators of Alexandroff spaces are both convex closure operators. Thus, they can be treated as two cases of a general theory of convex structures [cf. van de Vel (1993)]. This suggests that topology and convexity, used as devices for structuring conceptual spaces should be considered as special cases of the more general approach of an approach that conceives conceptual spaces as closure structures.
Analogously, the lower set ↓A of A ⊆ X is defined by ↓A: = {y; y ≤ a for some a ∈ A}. Thereby, the so-called lower topology of (X, ≤) is defined as the set of all lower sets {↓A; A ⊆ X}. In this paper, however, there is no need to consider this topology of (X, ≤).
In classical topology, the separation axiom T1 is considered a minimal requirement that must be satisfied for a topological space to be considered reasonable. (A.13)(i) shows that Alexandroff spaces fall outside the realm of classical theory: Only trivial (discrete) Alexandroff spaces are T1, and some important Alexandroff spaces such as the digital plane (Z × Z, O(Z × Z)) fail to be T1/2.
I owe this example to Imanol Mozo. Many thanks for this!
References
Adams, C., & Franzosa, R. (2008). Introduction to topology, pure and applied. Upper Saddle River: Prentice Hall.
Aiello, M., van Bentham, J., & Bezhanishvili, G. (2003). Reasoning about space: The modal way. Journal of Logic and Computation, 13(6), 799–919.
Aiello, M., Pratt, I. E., & van Benthem, J. F. A. K. (2007). Handbook of spatial logics. Springer.
Alexandroff, P. (1937). Diskrete Räume, Rec. Math. [Mat. Sbornik], N.S., 1937, Volume 2 (44), Number 3, 501–519.
Bezhanishvili, G., Mines, R., & Morandi, P. J. (2003). Scattered, Hausdorff-reducible, and hereditarily irresolvable Spaces. Topology and its Applications, 132, 291–306.
Bezhanishvili, G., Esakia, L., & Gabelaia, D. (2004). Modal logics of submaximal and nodec spaces, Festschrift for Dick de Jongh on his 65th birthday. University of Amsterdam.
Bobzien, S. (2012). If it’s clear, then it’s clear that it’s clear, or is it? Higher-order vagueness and the S4 axiom. In K. Ierodiakonou & B. Morison (Eds.), Episteme, etc: Essays in honour of Jonathan Barnes (pp. 189–212). Oxford: Oxford University Press.
Bobzien, S. (2015). Columnar higher-order vagueness, or vagueness is higher-order vagueness. Proceedings of the Aristotelian Society, Supplementary, 89, 61–89.
Carnap, R. (1971). A basic system of inductive logic, part I. In R. Carnap & R. C. Jeffrey (Eds.), Studies in inductive logic and probability (Vol. I, pp. 33–165). Berkeley: University of California Press.
Cassirer, E. (1937 (1956)). Determinism and indeterminism in modern physics. New Haven and London: Yale University Press.
Chen, L. M. (2015). Digital and discrete geometry. New York: Springer.
Couprie, M., Cousty, J., Kenmochi, Y., & Coeurjolly, D. (2020). Guest editorial: Special issue on discrete geometry for computer imagery. Journal of Mathematical Imaging and Vision, 62, 625–626.
Curto, C. (2017). What can topology tell us about the neural code? Bulletin (New Series) of the American Mathematical Society, 54(1), 63–78.
Decock, L., & Douven, I. (2015). Conceptual spaces as philosophers’ tools. In F. Zenker & P. Gärdenfors (Eds.), Applications of conceptual spaces, the case for geometric knowledge representation (pp. 207–222). New York: Springer.
Douven, I. (2019a). The rationality of vagueness. In R. Dietz (Ed.), Vagueness and rationality in language use and cognition (pp. 115–134). New York: Springer.
Douven, I. (2019b). Putting prototypes in place. Cognition, 193, 1–13. https://doi.org/10.1016/j.cognition.2019.104007.
Douven, I., Decock, L., Dietz, R., & Égré, P. (2013). Vagueness: A conceptual spaces approach. Journal of Philosophical Logic, 42, 137–160.
Douven, I., & Gärdenfors, P. (2019). What are natural concepts? A Design Perspective, Mind and Language. https://doi.org/10.1111/mila.12240.
Friedman, M. (2001). Dynamics of reason. The 1999 Kant lectures at Stanford University, Stanford, California, CSLI Publications.
Gabelaia, D. (2001). Modal definability in topology. Master’s Thesis, University of Amsterdam.
Gärdenfors, P. (2000). Conceptual spaces. A Bradford Book. Cambridge: MIT Press.
Goubault-Larrecq, J. (2013). Non-Hausdorff topology and domain theory. Selected topics in point-set theory. Cambridge: Cambridge University Press.
Hernández Conde, J. V. (2017). A case against convexity in conceptual spaces. Synthese, 194(10), 4011–4037.
Johnstone, P. (1982). Stone spaces. Cambridge: Cambridge University Press.
Kaipainen, M., Zenker, F., Hautamäki, A., & Gärdenfors, P. (2019). Conceptual spaces: Elaborations and applications. New York: Springer.
Kong, T. Y., Kopperman, R., & Meyer, P. R. (1991). A topological approach to digital topology. The American Monthly, 98(10), 901–917.
Kopperman, R. (1994). The Khalimsky line as a foundation of digital topology. In Y.-L. O. A. Toet, D. Foster, H. J. A. M. Heijmans, & P. Meer (Eds.), Shape in picture (pp. 3–20). Berlin: Springer.
Kovalevsky, V. (2006). Axiomatic digital topology. Journal of Mathematical Imaging and Vision, 26, 41–58.
Kuratowski, K., & Mostowski, A. (1976). Set theory. With an introduction to descriptive set theory. Amsterdam: North-Holland.
McKinsey, J. C. C., & Tarski, A. (1944). The algebra of topology. Annals of Mathematics, 45(2), 141–191.
Melin, E. (2008). Digital geometry and Khalimsky spaces, Uppsala dissertations in mathematics 54. Uppsala: Uppsala University.
Melin, E. (2009). Digital Khalimsky manifolds. Journal of Mathematical imagining and vision, 33, 267–280.
Mormann, T. (2020). Topological models of columnar vagueness. Erkenntnis online. https://doi.org/10.1007/s10670-019-00214-2.
Okabe, A., Boots, B., & Sugihara, K. (1992). Spatial tessellations: Concepts and applications of Voronoi diagrams. New York: Wiley.
Osta-Vélez, M., & Gärdenfors, P. (2020). Category-based induction in conceptual spaces. Journal of Psychology, 96, 1–14.
Rabadán, R., & Blumberg, A. J. (2020). Topological data analysis for genomics and evolution. Topology in biology. Cambridge: Cambridge University Press.
Rosenfeld, A. (1979). Digital topology. The American Mathematical Monthly, 86(8), 621–630.
Rumfitt, I. (2015). The boundary stones of thought. An essay in the philosophy of logic. Oxford: Oxford University Press.
Sainsbury, R. M. (1996 (1990)). Concepts without boundaries. In: Keefe and Smith (Eds.), Vagueness. A Reader (pp. 251– 64). Cambridge MA: MIT Press.
Steen, L. A., & Seebach, J. A., Jr. (1978). Counterexamples in topology (2nd ed.). New York: Springer.
Sznajder, M. (2016). What conceptual spaces can do for Carnap’s late inductive logic. Studies in History and Philosophy of Science, Series A, 56, 62–71.
Van de Vel, M. L. J. (1993). Theory of convex structures. Amsterdam: North-Holland.
Willard, S. (2004). General topology. Mineola, NY: Dover Publications.
Zenker, F., & Gärdenfors, P. (2015). Applications of Conceptual Spaces. The Case for Geometric Knowledge Representation. New York: Springer.
Zvolsky, M. (2014). Tomographic image reconstruction. An introduction. Lecture on medical physics by Erika Garutti and Florian Grüner, DESY, University of Hamburg.
Acknowledgements
Many thanks to the referees for very helpful corrections, comments, and suggestions on previous versions of this paper. Further, I’d like to thank Javier Belastegui for some useful remarks and criticisms. Financial aid from the Research Project GIU/19051, funded by the University of the Basque Country UPV/EHU, is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Elements of topology
For the reader’s convenience, this appendix lists some basic definitions and facts of topology that are used in this paper. An excellent textbook of elementary set-theoretical topology is Willard (2004).
Definition A.1
Let X be a set with power set 2X. A topological space (X, OX) is a relational structure with OX ⊆ 2X satisfying the following:
(i) Ø, X ∈ OX;
(ii) Finite intersections and arbitrary unions of elements of OX are elements of OX.
The elements of OX are called open sets of (X, OX). The set-theoretical complements of open sets are called closed sets.Footnote 25 As usual, when there is no danger of confusion, a topological space (X, OX) is simply denoted by X.
(iii) A topological space (X, OX) is an Alexandroff space iff arbitrary intersections (unions) of open (closed) sets are open (closed).♦
If X has more than one element, then different topological structures xist on X. In particular, there are two extreme topological structures (X, O0X) and (X, O1X) defined by O0X := {Ø, X} and O1X := 2X. The topology (X, O0X) is called the indiscrete topology on X, and the topology (X, O1X) is called the discrete topology. With respect to set-theoretical inclusion all topological structures (X, OX) on X lie between these two (rather uninteresting) extremal topologies: O0X ⊆ OX ⊆ O1X. A topology OaX is coarser than a topology ObX iff OaX ⊆ ObX. Equivalently, ObX is said to be finer than OaX. Thus, O0X is the coarsest topology on X, and O1X is the finest topology on X.♦
The following definition collects some standard methods to construct new topologies from old ones:
Definition A.2
Let (X, OX) and (Y, OY) be two topological spaces. Recall that a (set-theoretical) map X—f → Y is continuous iff f−1(OY) ⊆ OX. The map f is open if and only if f(OX) ⊆ OY.
(i) The product topology O(X × Y) on X × Y is the finest topology such that the projections X × Y—pX → X and X × Y—pY → Y are continuous with respect to O(X × Y) and O(X) and O(X × Y) and O(Y), respectively.
(ii) Let Z—i— > X be an inclusion map of a subset Z ⊆ X. If (X, OX) is a topological space, the induced topological structure (Z, OZ) is the coarsest topology on Z such that the map i is continuous, i.e., OZ = Z ∩ OX.
(iii) Let ~ be an equivalence relation on X and X—q→ X/~ the canonical quotient map. The quotient topology OX/~ on X/~ is the finest topology such that q is continuous.♦
Topological structures (X, OX) can be defined in many equivalent ways. For our purposes, particularly useful is a definition in terms of closure operators cl or interior kernel operators int. These operators must satisfy the so-called Kuratowski axioms:
Definition A.3
A topological closure operator is an operator 2X—cl → 2X satisfying the four requirements (i) – (iv) below. Dually, a topological interior kernel operator is a map 2X—int → 2X satisfying requirements (i)*–(iv)*:
(i) cl(A ∪ B) = cl(A) ∪ cl(B) (i)* int(A ∩ B) = int(A) ∩ int(B). (Distributivity)
(ii) cl(cl(A)) = cl(A). (ii)* int(int(A)) = int(A). (Idempotence)
(iii) A ⊆ cl(A). (iii)* int(A) ⊆ A. (Extension)
(iv) cl(Ø) = Ø. (iv)* int(X) = X. (Normality)
Closure operators and interior kernel operators are interdefinable: Denoting the set-theoretical complement of A by CA, one obtains cl(A) = Cint(CA)) and int(A) = Ccl(CA)). Every topological closure operator cl uniquely defines a topological structure (X, OX) and vice versa. Given cl, the class of open sets OX is defined by OX := {B; B = Ccl(A); A ⊆ X}. Dually, given a topological interior kernel operator int, the corresponding topological structure OX is defined by OX := {A; A = int(A), A ⊆ X}.
For A ⊆ X, the boundary bd(A) of A is defined as bd(A) := cl(A) ∩ cl(CA) = C(int(A) ∪ int(CA)). Moreover, it is possible to define cl (and int) in terms of bd.♦
Topological closure operators are only one of many different types of closure operators used in mathematics. As is well known, also the concept of convexity may be defined in terms of closure operators:
Definition A.4
A convex closure operator (or convexity) on a set X is defined as an operator 2X—co → 2X that satisfies the following requirements:
(i) A ⊆ B ⇒ co(A) ⊆ co(B). (Monotony)
(ii) co(co(A)) = co(A). (Idempotence)
(iii) A ⊆ co(A). (Extension)
(iv) co(Ø) = Ø. (Normality)
(v) For all y ∈ co(A) there is a finite set F ⊆ A such that y ∈ co(F). (Algebraicity).
A set A is called convex with respect to the operator co iff co(A) = A. The convex operator co is of arity ≤ n provided its convex sets are precisely the sets A with the property that co(F) ⊆ A for each F ⊆ A with cardinality#F ≤ n.♦
The familiar Euclidean convexity is a convex operator of arity 2.Footnote 26 More interesting is the observation that the topological closure operator cl of an Alexandroff space (X, OX) is also a convex closure operator in the sense of (A.4). By definition (see A.9) a set A is closed in the Alexandroff topology iff A = ↓A. Then x ∈ ↓A iff there is an a ∈ A with x ≤ a. In other words, x ∈ ↓a = co(a). Thus, one may choose F(x) = {a} as the finite set F(x) with F(x) ⊆ A and x ∈ co(F(x)). Hence, the “lower convexity”, defined by the Alexandroff topological operator, is of arity 1.
In other words, a conceptual space (X, OX) endowed with an Alexandroff topological structure OX (defined by the operator cl) may be conceived as a space endowed with a convex structure (defined as well by cl).Footnote 27 Admittedly, this “Alexandroff convexity” is rather different from the Euclidean convexity that most conceptual spaces are assumed to be endowed with. Nevertheless, this fact suggests that Alexandroff’s and Gärdenfors’s approaches to conceptual spaces are not totally alien to each other.
Quite often, a topological structure (X, OX) and a convex structure (X, co) co-exist on the same set X. Prominent example are the Euclidean spaces Rn. In this situation it is expedient to require appropriate compatibility conditions of the two structures [for details see van de Vel (1993, ch. III].
Proposition A.5
Let (X, OX) be a topological space. An open subset A ∈ OX is regular open iff A = int(cl(A)). The set of all regular open subsets of X is denoted by O*X. O*X is well known to be a complete Boolean algebra. There is a map OX—j → O*X defined by j(A) := int(cl(A)) and an inclusion map O*X—i → OX such that j • i = idO*X and idOX ⊆ i • j.♦
Definition A.6
Let (X, OX) be a topological space.
(i) An element x ∈ X is isolated iff {x} ∈ OX. The set of isolated points of X is denoted by ISO(X).
(ii) A subset A ⊆ X is dense in X iff cl(A) = X.
(iii) The space (X, OX) is weakly scattered iff ISO(X) is dense in X, i.e., cl(ISO(X)) = X.
(iv) The space (X, OX) satisfies the McKinsey axiom iff int(cl(A)) ⊆ cl(int(A)) for all A ⊆ X.♦
Definition A.7
(Specialization quasi-order of a topology) Let X be a set. A quasi-order on X is a binary relation ≤ such that for all x, y, z ∈ X, the following conditions (i) and (ii) are satisfied:
(i) x ≤ x. (Reflexivity)
(ii) x ≤ y and y ≤ z implies x ≤ z. (Transitivity)
(iii) If also x ≤ y and y ≤ x implies x = y is satisfied the quasi-order ≤ is said to be a partial order, and the structure (X, ≤) is called a poset.
(iv) A subset C of a partial order (X, ≤) is a chain iff all elements x, y ∈ C are comparable, i.e., x ≤ y or y ≤ x. If C is a finite chain in X with #C = n +1, the length of C is n. The length of the longest chain is called the depth of partial order.
A topological space (X, OX) defines a quasi-order (X, ≤) by x ≤ y := x ∈ cl(y). This quasi-order is called the specialization quasi-order of (X, OX). The set of maximal elements of (X, ≤) with respect to this order is denoted by MX.♦
For many traditional topological spaces such as the Euclidean spaces (E, OE), the specialization order (E, ≤) is trivial, i.e., x ≤ y iff x = y, or, equivalently, iff MX = X. In contrast, for non-trivial Alexandroff spaces (X, OX) the specialization quasi-order is non-trivial, i.e., MX ≠ X.
Proposition A.8
(Upper topology defined by a quasi-order (X, ≤)) Let (X, ≤) be quasi-order. For A ⊆ X, define the upper set of A by ↑A := {x; a ≤ x for some a ∈ A}. The upper topology (X, OX) corresponding to (X, ≤) is defined by OX := {↑A; A ⊆ X}. The closed sets of this topology are the lower sets of (X, ≤) defined by A := ↓A := {y; y ≤ a for some a ∈ A}. X endowed with the upper topology of the quasi-order (X, ≤) is an Alexandroff topological space (X, OX).Footnote 28♦
Proposition A.9
Let (X, OX) be an Alexandroff space with the specialization quasi-order (X, ≤). Then, the upper topology of X is isomorphic to (X, OX). In other words, the topology of an Alexandroff space (X, OX) is completely determined by its specialization quasi-order (X, ≤). An element a ∈ X is maximal with respect to the specialization order if and only if a ∈ ISO(X), i.e., {a} ∈ OX.♦
1.1 Separation axioms
Let (X, OX) be topological space.
(i) X is a T0-space iff for every x ∈ X and every y ≠ x there exists an open set A ∈ OX such that either x ∈ A and y ∉ A or x ∉ A and y ∈ A.
(ii) X is a T1/2-space iff every point x ∈ X is either open or closed.
(iii) X is a T1-space iff every point x ∈ X is closed.
(iv) (X, OX) is a T2-space (or Hausdorff space) iff for distinct points x and y there are open sets A ∈ OX and B ∈ OX containing x and y such that x ∉ A and y ∉ B.
(v) The separation axioms T0 – T2 satisfy a chain of proper implications: T2 ⇒ T1 ⇒ T1/2 ⇒ T0.♦
The following examples show that Euclidean and Alexandroff spaces behave quite differently with respect to separation axioms:
1.2 Examples
(i) The standard Euclidean topology OR of the real line R is generated by open intervals (a, b) = {x; a < x < b}. Two distinct points x and y can be separated by open intervals U(x) and U(y), which are disjoint from each other. Hence, (R, OR) is a T2–space. A fortiori, all points are closed, and no point is open.
(ii) Let (N, ≤) be the set of natural numbers endowed with their natural order ≤ . A topological space (N, ON) is defined by stipulating that Ø and the sets ↑n := {m; n ≤ m} are open for each n ∈ N. Then (N, ON) is an Alexandroff space that satisfies T0 but not T1/2. No point of (N, ON) is open, and the only closed point of (N, ON) is 0.
(iii) The Khalimsky line (Z, OZ) (as a polar space) satisfies the axiom T1/2 but not T1.
(iv) The Khalimsky plane (Z × Z, OZ × Z) satisfies T0 but not T1/2. The even points (2m, 2n) ∈ Z × Z are closed, the odd points (2m + 1, 2n + 1) ∈ Z × Z are open, and the “mixed points” (2m, 2n + 1), (2m +1, 2n) ∈ Z × Z are neither open nor closed.♦
Proposition A.12
(i) An Alexandroff space (X, OX) satisfies T1 iff it is discrete, i.e., OX = 2X.
(ii) A topological space (X, OX) is a T0-Alexandroff space iff its specialization quasi-order (X, ≤) is a partial order.Footnote 29
(iii) For an Alexandroff space with specialization quasi-order (X, ≤) define an equivalence relation on X by x ~ y := x ≤ y and y ≤ x. Then (X/~, OX/~) is a T0-Alexandroff space.♦
Appendix B: Examples of Alexandroff spaces
2.1 B.1
All finite topological spaces (X, OX) are Alexandroff spaces with O*X atomic. The Sierpinski space (X, OX) with X = {a, b}, OX = {Ø, {a}, {a, b}} is weakly scattered. In general, finite topological are not weakly scattered. The smallest example is the space X = {a, b, c} with topology OX = {Ø, {a, b}, {c}, {a, b, c}}. The only isolated point of (X, OX) is {c}, but {c} is not dense in (X, OX), since clearly cl(c) = {c}. Nevertheless, O*X is atomic, namely, O*X is the Boolean algebra with four elements {Ø, {a, b}, {c}, {a, b, c}}, generated by the atoms {a, b} and {c}.
2.2 B.2
Polar spaces X provide the simplest class of Alexandroff spaces that may have infinitely many elements. Examples treated in detail include the linear color spectrum and the circular color spectrum (color circle) with finitely many poles but infinitely many shades of colors.
Perhaps the most important example of a polar space is the Khalimsky line (or digital line) (Z, OZ) defined by the pole distribution (Z, m, 2Z + 1) (cf. 2.10). Indeed, the Khalimsky line may be considered as the “foundation of digital topology” (cf. Kopperman (1994)).
2.3 B.3
Finite products of polar spaces are weakly scattered Alexandroff spaces. More generally, finite products of weakly scattered Alexandroff spaces are weakly scattered Alexandroff spaces.
2.4 B.4
Not all Alexandroff spaces with infinitely many elements are weakly scattered. An example is the Alexandroff space (N, ON) defined by the standard linear order (N, ≤) as the specialization order. As is easily observed, the set of isolated points of this space is empty. Hence, (N, ON) is not weakly scattered. Nevertheless, the Boolean algebra O*N is atomic, namely, the minimal Boolean algebra of two elements generated by the atom N.
2.5 B.5
More generally, there are infinite trees (X, ≤) whose Alexandroff topologies (X, OX) have regular open lattices O*X that are the atomic Boolean algebras 2n, n = 1, 2, … Just take X to be the disjoint union of n copies of N endowed with the natural order. Identify the minimal elements (“0”) of all copies of N with each other. The result is a tree with n infinite linear branches. Clearly, (X, OX) is not weakly scattered, because X has no isolated points at all. However, the Boolean algebra O*X of regular open sets of the Alexandroff space (X, OX) is the atomic Boolean algebra 2n generated by the regular open upper sets ↑x1, …, ↑xn, where each xi generates a branch of the tree as its open hull↑xi.
2.6 B.6
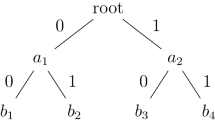
Not all Alexandroff spaces are regular atomic. An example is given by the specialization order (X, ≤) of the infinite binary tree.Footnote 30 Let X be the set of finite 0–1-sequences (ε1, …, εn), εi = 0, 1, endowed with the following partial order: For x, y ∈ X one has x ≤ y := x is an initial subsequence of y, i.e. y = (x, z) and z ∈ X. Then (X, ≤) is an infinite binary tree with root the empty sequence Ø. The two children of Ø are the sequences (0) and (1), the children of (0) and (1) are (0, 0) and (0,1), and (1, 0) and (1, 1), respectively, and so on.
For all x ∈ X, the subtrees ↑x are regular open subsets of (X, OX). They are not atomic since for any x, one may find x < x’ < x’’ < … such that ↑x ⊃ ↑x’ ⊃ ↑x’’ ⊃ …. One then obtains infinite strictly decreasing sequences of regular open elements of O*X.♦
2.7 B.7
There are weakly scattered spaces (X, OX) with atomic O*X that are not Alexandroff: Let (R, OR) be the set of real numbers R endowed with the topology engendered by the standard Euclidean topology and the elements of the set Q of rational numbers. Then, the rationals are isolated points of (R, OR) such that cl(Q) = R since every open neighborhood U(s) of an irrational number s contains a rational number q ∈ Q. The singletons {s} of irrational numbers s ∈ R − Q are closed but not open: if {s} were open, s ∈ intcl(s) ⊆ intcl(R − Q). However, clearly intcl(R − Q) = int(R − Q) = Ø, since Q is open in this topology. Hence, {s} is closed but not open. This shows that (R, OR) is not Alexandroff, since the intersection {s} of the open neighborhoods of s is not open. The Boolean lattice O*R is atomic, since clearly O*R = PQ due to the fact that the only atomic elements of O*R are singletons {q} with q ∈ Q.♦
Rights and permissions
About this article

Cite this article
Mormann, T. Prototypes, poles, and tessellations: towards a topological theory of conceptual spaces. Synthese 199, 3675–3710 (2021). https://doi.org/10.1007/s11229-020-02951-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11229-020-02951-2