
Abstract
We provide a practical demonstration that it is possible to systematically generate a variety of high-performance micro-kernels for the general matrix multiplication (gemm) via generic templates which can be easily customized to different processor architectures and micro-kernel dimensions. These generic templates employ vector intrinsics to exploit the SIMD (single instruction, multiple data) units in current general-purpose processors and, for the particular type of gemm problems encountered in deep learning, deliver a floating-point throughput rate on par with or even higher than that obtained with conventional, carefully tuned implementations of gemm in current linear algebra libraries (e.g., BLIS, AMD AOCL, ARMPL). Our work exposes the structure of the template-based micro-kernels for ARM Neon (128-bit SIMD), ARM SVE (variable-length SIMD) and Intel AVX512 (512-bit SIMD), showing considerable performance for an NVIDIA Carmel processor (ARM Neon), a Fujitsu A64FX processor (ARM SVE) and on an AMD EPYC 7282 processor (256-bit SIMD).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A few decades ago, the basic linear algebra subprograms (BLAS) [1] sparked portability in scientific computing by defining a standard interface that hardware vendors could instantiate into their products, and researchers could then leverage from their codes and libraries. A significant leap forward toward combining portability with performance came later, in a seminal paper from Kazushige Goto and Robert A. van de Geijn in 2008 [2]. There, the authors define the foundations for the realization of the high performance matrix multiplication (gemm) that underlies most current linear algebra libraries, such as GotoBLAS [2], BLIS [3], OpenBLAS [4], AMD AOCL, and (possibly) Intel MKL and oneAPI.
The ideas behind Goto and van de Geijn’s algorithm for gemm were eventually extended to formulate a rich family of algorithms for this operation that comprises six algorithms and three types of micro-kernels [5,6,7]. In [7], we investigated the members of this family, manually instantiating them on an NVIDIA Carmel, ARM-based processor, and conducting an evaluation for the type of operators that are encountered in convolutional neural networks [8, 9], using a simple micro-kernel only.
In this paper, we continue our previous work in [7, 9] toward improving portability (and maintainability) of gemm. The key in this paper lies in the formulation of a common generic micro-kernel, which can then be easily instantiated into a collection architecture-specific realizations via a few macros and two configuration variables specifying the micro-kernel dimensions. This differs from current realizations of gemm in libraries such as GotoBLAS2, OpenBLAS and BLIS, which integrate a single micro-kernel per architecture, encoded in assembly. This work thus makes the following specific contributions:
-
We describe how to develop an ample variety of multi-platform, high performance micro-kernels for matrix multiplication using high level vector intrinsics to exploit the SIMD (single instruction, multiple data) units in current general-purpose processors.
-
We integrate the intrinsics-based micro-kernels into the BLIS family of algorithms for matrix multiplication, experimentally exploring the performance of the family members.
-
We provide practical evidence of the advantages and caveats of this high-level approach, for deep learning (DL) applications, on two ARM-based multicore processors, equipped with 128-bit and 512-bit SIMD units.
The rest of the paper is structured as follows. Sect. 2 briefly reviews the family of BLIS algorithms for high performance matrix-matrix multiplication. Sect. 3 explains how to generate gemm micro-kernels using vector intrinsics. Sect. 4 is devoted to the experimental results. Finally, Sect. 5 summarizes the main results, presents some conclusions, and discusses future work.
2 The family of BLIS algorithms for GEMM
2.1 High performance implementation of gemm
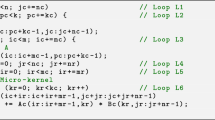
Consider the gemm \(C = C + AB\), where the operands are matrices with the following dimensions: \(A \rightarrow m \times k\), \(B \rightarrow k \times n\), and \(C \rightarrow m \times n\). The BLIS framework (as well as other libraries, such as AMD ACML, OpenBLAS and ARMPL) follows GotoBLAS to encode this operation as three nested loops around two packing routines and a macro-kernel. In BLIS, the macro-kernel is decomposed into two additional loops around a micro-kernel, with the latter comprising a single loop that performs an outer product per iteration. The top-left part of Fig. 1 displays the BLIS baseline algorithm for gemm, comprising the six loops, the two packing routines, and the micro-kernel.
Hereafter, we will refer to the BLIS baseline algorithm as B3A2C0. In this notation, \(Z \in \{\text {A,B,C}\}\) specifies one of the three matrix operands and the subsequent number, \(i\in \{0,2,3\}\), indicates the cache level where that operand resides (with 0 referring to the processor registers). The same matrix operand resides in both the L1 and L3 caches.

Variants of the BLIS family for gemm with C streamed from memory into the processor registers: B3A2C0 (left) and A3B2C0 (right)
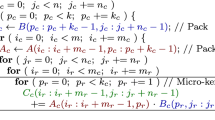
The three outermost loops of the B3A2C0 algorithm, indexed by \(j_c\), \(p_c\) and \(i_c\), respectively, traverse the n–, k– and m–dimension of the problem, partitioning the matrix operands conformally to the processor cache hierarchy. This nesting of the loops, together with the specific packing of B, A, and a selection of the cache configuration parameters \(n_c\), \(k_c\) \(m_c\), adjusted to the target processor architecture [10], favor that \(B_c\) remains in the L3 cache and \(A_c\) in the L2 cache during the execution of the micro-kernel, while C is streamed from the main memory into the processor registers; see the bottom-left part of Fig. 1 [10]. Besides, for high performance, the packing routines ensure that the contents of the buffers \(A_c,B_c\) are accessed with unit stride from the micro-kernel (see Fig. 2), and this specific part of the code is usually implemented using assembly in order to exploit the SIMD floating point units in current processors.

Packing in the BLIS algorithm. The buffer \(A_c\) is packed into micro-panels of \(m_r\) rows while the buffer \(B_c\) is packed into micro-panels of \(n_r\) columns. When convenient, we will refer to these micro-panels as \(A_r\) and \(B_r\), respectively
2.2 Meeting other members of the BLIS family
The B3A2C0 algorithm arranges the loops (from outermost to innermost) in the order \(j_c\rightarrow p_c\rightarrow i_c\rightarrow j_r\rightarrow i_r\rightarrow p_r\), with the packing of B, A inserted within loops L2, L3, respectively; see Fig. 1.
Other variants of the BLIS family of algorithms for gemm [5,6,7] can be obtained by nesting the loops differently, so as to favor that the matrix operands are “distributed” across the levels of the memory hierarchy following a different strategy. For example, as A, B are both input operands and play symmetric “roles” in the matrix multiplication, we can aim at maintaining \(A_c\) in the L3 cache, \(B_c\) in the L2 cache, while the micro-tile \(C_r\) resides in the processor registers, yielding the A3B2C0 variant. This can be done by reordering the loops of the BLIS baseline algorithm as \(i_c\rightarrow p_c\rightarrow j_c\rightarrow i_r\rightarrow j_r\rightarrow p_r\) (that is, by swapping the loops for \(i_c,j_c\) and \(i_r,j_r\)) while placing the packing of A, B within loops L2, L3, respectively (and choosing the appropriate values for \(m_c,n_c,k_c\)); see the right hand-side of Fig. 1.
The two variants previously described, B3A2C0 and A3B2C0, keep a micro-tile \(C_r\) in the processor registers, repeatedly updating its contents inside loop L6 of the micro-kernel. The family of BLIS algorithms for gemm can be enlarged by maintaining C in the L2 cache, yielding the two alternatives in Fig. 3. In the B3C2A0 variant (left hand-side of the figure), the loops are ordered as \(j_c\rightarrow p_c\rightarrow i_c\rightarrow p_r\rightarrow i_r\rightarrow j_r\), and the two packing buffers contain blocks from B, C. With this solution, \(B_c\) resides in the L3 cache (and a part of it, in the L1 cache), while the micro-tile that is streamed from memory and remains in the processor registers, during the execution of the micro-kernel, corresponds to A. By swapping the roles of A and B in this variant, we obtain the A3C2B0 counterpart; see the right hand-side of Fig. 3.

Variants of the BLIS family for gemm with C in the L2 cache: B3C2A0 (left) and A3C2B0 (right)
Finally, the last two members of the BLIS family target the L3 cache with the C matrix: C3B2A0 and C3A2B0. In the first case, \(B_c\) is to remain in the L2 cache and a micro-tile \(A_r\) in the processor registers while in the second one, the roles of A and B are swapped. Again, this is attained with a specific ordering of the loops, (a proper selection of the cache configuration parameters, adjusted to the target processor architecture,) and the appropriate packing. For brevity, we do not provide the schemes of the last two algorithms, but they can be found in [7].
3 Micro-kernels for GEMM
BLIS encodes the five outermost loops and the two packing routines in a portable, high level programming language such as C. In contrast, for high performance, BLIS integrates architecture-specific micro-kernels, encoded using assembly, for many processors from AMD, Intel, ARM and IBM. (Actually one micro-kernel per architecture.)
In this section, we depart from the BLIS conventional approach by exploring the use of high level micro-kernels, totally encoded in the C programming language, that leverage vector intrinsics to exploit the SIMD units of the processor. The goal is to enhance portability (and maintainability), possibly at the cost of some performance. (However, in the next section we will show that, our solution can also pay off in terms of performance, especially when we have to deal with DL applications on processors with 128-bit SIMD units.)
For simplicity, we choose 32-bit floating point (FP32) as the basic data type for all the routines/codes presented in the section (in C language, float), although the same ideas apply to other data types.
3.1 Quick overview of the BLIS micro-kernels
The family of BLIS algorithms for matrix multiplication relies on three types of kernels: The two variants with C resident in the processor registers (in Fig. 1) update a micro-tile of C via \(k_c\) outer products, as illustrated in Fig. 4 (top). In contrast, the variants that operate with A resident in the processor registers (e.g., left hand-side variant in Fig. 3) update a micro-tile of A via \(n_c\) matrix-vector products, as displayed in Fig. 4 (middle). Finally, the variants with B resident in the processor registers (e.g., right hand-side variant in Fig. 3) perform \(m_c\) vector-matrix products to update the micro-tile of B; see Fig. 4 (bottom). Hereafter we will refer to these three types of micro-kernels as C-resident, A-resident, and B-resident (to specify the matrix operand that stays in the processor registers).
Each type of micro-kernel requires a specific type of packing of two of the matrix operands. For the micro-kernel with C-resident, the packing schemes of A and B into buffers was already specified in Fig. 2; when the micro-kernel is A-resident, \(C_c,B_c\) are packed following the same pattern as \(A_c\) in Fig. 2 (though with \(B_c\) packed into blocks of \(k_r\) rows); and when the micro-kernel is B-resident, the buffers for \(C_c,A_c\) are packed as \(B_c\) in the same figure (with \(A_c\) packed in blocks of \(k_r\) columns).

Micro-kernels with C-resident (top), A-resident (middle) and B-resident (bottom)
3.2 An architecture-specific micro-kernel with C-resident for ARM Neon
We open the description of the high level micro-kernels by providing a simple example, with C-resident and \(m_r \times n_r = 4 \times 4\) (dimension of the micro-tile of C), that leverages ARM Neon (intrinsics). We can highlight the following aspects in the routine in Listing 1:
-
C is assumed to be stored by columns with leading dimension (that is, number of entries between two elements in the same row) Clda. The routine receives a pointer C into the appropriate entry of C.
-
The buffers \(A_c,B_c\) are stored as displayed in Fig. 2. The routine receives pointers two Ar, Br into the appropriate entries of the respective buffers, corresponding to the “top-left entries” of the \(m_r \times k_c\) and \(k_c \times n_r\) blocks involved in the execution of the micro-kernel.
-
ARM Neon operates with 128-bit vector registers (that is, 4 FP32 numbers per register). For ARMv8.2, there are 32 vector registers in total.
-
Prior to the loop, four columns of C, each consisting of four FP32 numbers, C are loaded into four vector registers: C0–C3 (Lines 15–16). After the loop, the contents of these vector registers are stored back into C (Lines 31–32).
This scheme is associated with the column-major layout of C in memory. For a matrix stored in row-major order, it would be more natural to load the rows of the micro-tile in the four vector register.
-
At each iteration, the code loads one column of Ar into a vector register ar (Line 20), one row of Br into a vector register br (also Line 20), and updates C0–C3 via four vector fused multiply-add intrinsics (Lines 23–26).

Encoding the micro-kernels with this level of abstraction, instead of using assembly, paves the road toward rapidly exploring many other versions. In this line, each iteration of the loop in the micro-kernel loads \(m_r+n_r\) elements to perform \(2m_rn_r\) floating point operations (flops). Choosing “squarish” micro-kernels (i.e., \(m_r \approx n_r\)) thus improves the ratio of flops to memory operations (also know as arithmetic intensity [11]). For the same reason, it is convenient to maximize the use of vector registers (without incurring into register spilling) [10]. For example, a \(4 \times 4\) micro-kernel employs 6 vector registers (one for Ar, one for Br, and four for C) to deliver an arithmetic intensity of \(32/8=4\). In comparison, an \(8 \times 12\) micro-kernel employs 29 vector registers (two for Ar, 3 for Br, and 2\(\cdot\)12 vector for C) to render significantly higher arithmetic intensity: \(192/20=9.6\).
The micro-kernels can be further optimized by, on the one hand, integrating software pipelining [12] into the loop, in order to overlap computation and data transfers. For example, by using two additional vector registers, say arn, brn, at each iteration jr, we can initially load the jr+1 column/row of Ar,Br into them but operate with the data in ar, br. At the end of the iteration, in preparation for the next one, we copy the data from arn, brn to ar, br. On the other hand, loop unrolling [12] can help to reduce the overhead due to loop control. Finally, there exist vector intrinsics in many architectures to perform software prefetching that can significantly improve performance. In this work, we restrain ourselves from exploring this venue to focus on portability.
3.3 Comparison to micro-kernel with A-resident for ARM Neon
Developing an \(m_r \times k_r = 4 \times 4\) micro-kernel with A-resident that leverages ARM Neon is direct, and results in the routine in Listing 2. A careful comparison of the micro-kernels with C-resident and A-resident reveals the following differences between them:
-
For the same micro-kernel dimension (that is, when \(m_r \times n_r = m_r \times k_r\)), the variant with C-resident presents a higher arithmetic intensity. The reason is that, while both types of micro-kernels perform the same number of flops and number of loads from memory, the variant with A-resident has to write a column of C back into the memory at each iteration of the loop.
-
The variant with A-resident repeatedly updates the vector register. This creates a RAW (read-after-write) dependency between the four vector fused multiply-add intrinsics (vfmaq_laneq_f32) that precludes their overlapped execution. An option to tackle this problem is to unroll the loop by a certain factor, but this comes at the cost of requiring a larger number of vector registers. This option constrains the dimensions of the micro-tile (\(m_r \times k_r\)) which do not produce register spilling.

3.4 A generic micro-kernel
We next take one significant step forward toward improving portability and maintainability by formulating a “generic” SIMD-enabled micro-kernel that is valid for any dimension \(m_r \times n_r\). (For simplicity, we describe only the C-resident case, but the same ideas apply to the two other types of micro-kernels.) For this purpose, we rely on C macros to abstract the basic vector (data types and) intrinsics that were utilized earlier in the gemm micro-kernels: load, store and axpy (scalar \(\alpha\) times x plus y) update. Furthermore, we will assume vector registers of b bits, each capable of storing \(\texttt {vl\_fp32}=b/32\) FP32 numbers. For an \(m_r \times n_r\) micro-kernel with C-resident, this implies that we need \(m_v \times n_r = (m_r/\texttt {vl\_fp32}) \times n_r\) vector registers to store the micro-tile of C; \(m_v\) for the column of Ar; and \(n_v = n_r/\texttt {vl\_fp32}\) for the row of Br. For simplicity, here we assume that \(m_r,n_r\) are both integer multiples of the vector register length vl_fp32.

Listing 3 presents the generic micro-kernel, where we can highlight a couple of details:
-
Prior to the main loop, indexed by pr (Line 24), we load the contents of the corresponding micro-tile of C into the array of vector registers Cr via two nested loops (Lines 20–22). The opposite transfer, from the vector registers back to memory, is carried out after the main loop (Lines 40–42).
-
At each iteration of the main loop, a column of \(m_r\) elements of Ar and a row of \(n_r\) elements of Br are first loaded into the appropriate vector registers (Lines 26–27 and 28–29, respectively). These elements then participate in the update of the micro-tile stored in Cr Lines 32–35).
In practice, for high performance it is convenient to fully unroll the loops iterating over the \(m_r,n_r\) dimensions of the problem. (That is, those indexed by iv, jv, and j.) This can be done either with assistance from the compiler, manually, or automatically with a simple script generator (as described later in this section).
3.5 Adapting the generic micro-kernel to ARM Neon
Specializing the generic micro-kernel in Listing 3 for ARM Neon can be achieved using the following six C macros:

Here, given that the vector registers in ARM Neon are 128-bit wide, we set vl_fp32 to (128/32=) 4 (FP32 numbers).
A problem with ARM Neon is that the last argument of the intrinsic vfmaq_laneq_f32 must be of type const int. This requires us to replace the innermost loop of the micro-tile update in the generic micro-kernel (Lines 34–35 in Listing 3) with the following fragment of code:

This is equivalent to fully unrolling the innermost loop of the update, and it is straight-forward to carry out manually.
3.6 Adapting the generic micro-kernel to Intel AVX-512
Intel was a pioneer company to explore wide SIMD units, from 64 bits in MMX (Intel Pentium MMX2, 1997-1998), to 128 bits in SSE (Intel Pentium III, 1999), 256 bits in AVX (Intel Sandy Bridge, 2011), and 512-bit in AVX-512 (Intel Xeon Phi and Intel Skylake, 2013).
Adapting the generic micro-kernel to Intel AVX-512 is attained via the redefinition of the six C macros:

Here we take into account that, for AVX-512, the vector registers are 512-bit long, and thus can contain vl_fp32=16 FP32 numbers.
Adapting the generic micro-kernel to Intel/AMD AVX2 presents minor differences and, therefore, it is omitted for brevity.
3.7 Adapting the generic micro-kernel to ARM SVE
ARM SVE (scalable vector extension) introduces a flexible intrinsics-based programming interface that supports variable-length SIMD units, of up to 2,048 bits.
In order to transform the generic micro-kernel with C-resident in Listing 3 into an SVE routine, we can define the following C macros:

In this particular example, we set \(\texttt {vl\_fp32}=512/32=16\) FP32 numbers to target an SVE-enabled processor with 512-bit vector registers. Also, we invoke the SVE intrinsic svwhilelt_b32_u32(0, vl_fp32) (via the macro vinit), to create an appropriate predicate (or mask) that operates with 512-bit vector registers.
In addition, we need to take into account the specific interface of the selected SVE instrinsic for the axpy-like update. In particular, zsvmla_n_f32_z multiplies the contents of a vector with a scalar that resides in memory and then adds the result to the contents of a second vector. In contrast, the generic micro-kernel assumed that the axpy update performs the addition of two vectors, one of them scaled with a specific component of a third vector register. This requires two small changes in the generic realization to accommodate the SVE intrinsic:
-
1.
The elements of B are no longer retrieved into vector registers using vector loads, but instead are retrieved one by one, as they are needed during the vector updates. Therefore, the loop which loads B in the generic micro-kernel (Lines 28–29) should be removed in the ARM SVE version.
-
2.
The vector update has to be modified to reflect the difference in the interface of the axpy-like intrinsics:


At this point we note that it is possible to produce a realization of the micro-kernel that is more similar to the original one using other SVE intrinsics. In particular, we can uploaded the row of B into vector registers, then broadcast each element into a separate vector register (via svdup_lane_f32), and finally update the micro-tile using svmla_f32_z. However, our experiments showed a lower performance due to the specific assembly instructions generated by the compiler for this option.
An additional hurdle for ARM SVE is that current compilers do not allow the declaration of arrays of vector registers. To avoid this, we created a Python (script) generator which, given a target pair \((m_r,n_r)\), automatically produces the code for the generic micro-kernel in C, with all loops traversing these two dimensions unrolled and the arrays translated into scalar variables. Listing 4 shows an example of the output produced by the Python generator for an \(mr \times n_r = 8 \times 4\) micro-kernel, with a vector register length vl_fp32=4.

3.8 Adapting the generic micro-kernel to RISC-V V
RISC-V mimics SVE to define a collection of intrinsics that can accommodate SIMD units with variable-length. Assuming a platform with 512-bit SIMD units (that is, with vl_fp32=16), the specialization of the generic micro-kernel to employ the RISC-V Vector Extension 1.0 (RVV 1.0), is achieved via the following C macros:

4 Experimental evaluation
In this section, we assess the efficiency of the BLIS family of algorithms when combined with high-level micro-kernels in the context of DL applications.
4.1 Setup
We leverage three architectures in this section:
-
An NVIDIA Carmel (ARMv8.2-based) processor embedded in the NVIDIA Jetson AGX Xavier board with 64 GiB of LPDDR4x memory. In order to reduce variability in the evaluation, the processor frequency in this platform was fixed to 2.3 GHz. The Operating System (OS) is Ubuntu 18.04, and we also utilized gcc v10.3, BLIS (version v0.8.1), OpenBLAS (version v0.3.19), and ARMPL (version v21.1).
-
A Fujitsu A64FX processor (2.20 GHz) from a cluster at the Barcelona Supercomputing Center. This is equipped with 32 GiB of HBM2 memory, and runs a Red Hat Enterprise Linux 8 OS with the following software used for the experiments: gcc v10.2.0, and BLIS v0.8.1.
-
An AMD EPYC 7282 16-core Processor (2.8 GHz), sited in a cluster at UPV, equipped with 504 GiB of DDR4 memory, and running a Ubuntu 10.04.6 LTS OS (Linux Kernel 4.15.0) with the following software: gcc v8.4.0, and BLIS v0.9.0.Footnote 1
A single core is employed in the three architectures, with a thread bound to it. (The multi-threaded, loop-level parallelism of the BLIS family of algorithms has been analyzed elsewhere [13, 14].) All experiments are carried out in IEEE FP32 arithmetic, and they are repeated a large number of times, reporting the average results in this section. Performance is measured in terms of billions of floating point operations per second, abbreviated as GFLOPS.
Given the extreme interest in deploying DL technologies, the dataset for the experimentation includes matrix mutiplications with their dimensions determined by the application of the im2col-approach to the convolution layers in the neural networks ResNet-50 v1.5 [15], VGG16 [16] and GoogleLeNet [17], combined with the ImageNet dataset. The batch size is set to 1 sample, reflecting latency-oriented scenario [8, 9]. In the following experiments, we focus on the performance gains that can be obtained when leveraging specific micro-kernels for the convolution operators in these neural networks. The global impact of these gains on the complete inference process depends on external factors to our work, such as the level of optimizations of other components. For example, in [9] we report that the convolution layers in the ResNet-50 v1.5 model (combined with ImageNet) can consume between 45% and 87% of the inference time, depending on the optimizations that were applied.
4.2 ARM Neon on NVIDIA Carmel
Figure 5 shows the performance obtained for (the matrix multiplications resulting from the application of im2col to) two convolution layers of Resnet-50 v1.5. For clarify, we only report results for the B3A2C0 algorithm for gemm, combined with 14 different micro-kernels, but omit the combinations for the other five variants of the BLIS family. We also refrain from evaluating the micro-kernels which require a number of vector registers that exceeds those available in the hardware (32 in the NVIDIA Carmel processor). For reference, we also include the performance attained with the implementations of gemm in BLIS, OpenBLAS and ARMPL specifically tuned for this processor. This experiment demonstrates the benefits of leveraging different micro-kernels for the gemm operation instead of the single kernel approach that conventional libraries offer. (For example, BLIS only offers the baseline algorithm combined with a micro-kernel of size \(8 \times 12\) for the NVIDIA Carmel processor.) In this scenario, we can benefit from the \(4\times 16\) micro-kernel in layer #3 and from the \(8 \times 12\) micro-kernel for the layer #16. In both layers, with the best micro-kernel choice, the generic implementation outperforms the other three fine-tuned gemm implementations by a non-negligible margin.

Performance of the B3A2C0 algorithm with different micro-kernels for the convolutional layers #3 and #16 in Resnet-50 v1.5 (left and right, respectively) on NVIDIA Carmel

Performance of the best algorithm+micro-kernel on NVIDIA Carmel
Figure 6 reports the performance of the different implementations of gemm for all the convolutional layers of Resnet-50 v1.5, VGG16 and GoogleLeNet on the NVIDIA Carmel processor. In this experiment, the results of the generic approach correspond to the best algorithm and micro-kernel for each layer. For this purpose, we evaluated all six algorithms, combined with micro-kernels of dimensions \(4\times 8\), \(4\times 12\), \(4\times 16\), \(4\times 20\), \(4\times 24\), \(8\times 12\), \(12\times 4\), \(12\times 8\), \(16\times 4\), \(20\times 4\), and \(24\times 4\).
For the Resnet-50 v1.5 model (top-left plot), OpenBLAS is the best option for three layers and BLIS for five layers. In comparison, the flexibility of the generic algorithm results in this being the option in 12 out of the 20 layers. For the VGG16 model (top-right plot), the generic algorithm outperforms the other libraries in four out of nine cases; BLIS is the best choice for four layers; and ARMPL is optimal for only one layer. Finally, for GoogleLeNet (bottom two plots), the generic algorithm offers the best performance in 41 out of 53 layers; OpenBLAS is the best option for layer #1 only; ARMPL is preferable for two layers; and BLIS for six layers.
4.3 ARM SVE on Fujitsu A64FX

Performance of the best algorithm+micro-kernel on Fujitsu A64FX
Figure 7 reports the results from the analysis on the Fujitsu A64FX processor. In this case, we compare our approach with the implementation of BLIS only as we have no access to optimized instances of OpenBLAS and ARMPL for this platform. For the generic algorithm, we have implemented and analyzed six micro-kernels: \(32\times 10\), \(32\times 12\), \(32\times 14\), \(48\times 8\), \(64\times 6\), and \(80\times 4\). In this platform, the BLIS library is extremely hand-tuned and includes aggressive prefetching techniques which result in an extra burst of performance. In comparison the micro-kernels integrated in the generic implementation do not leverage this technique. As a result, in the Resnet-50 v1.5 and VGG16 models (top-left and top-right plots, respectively), the generic algorithm is only competitive in about 20% of the layers. However, this occurs for the very first layers, which concentrate the most time-consuming operations. In contrast, for the GoogleLeNet model (bottom two plots), the generic algorithm outperforms BLIS in 32 of 53 layers. In summary, as was the case for the Carmel processor, the flexibility of generic micro-kernels selection benefits the overall performance of the gemm operations.
At this point, we note that some of the prefetching techniques featured by the BLIS routine can be also integrated into the intrinsics-based micro-kernel. However, this points in the direction of an architecture-specific solution, thus, is against the portability flag raised by this work. For this reason, exploring this option is left as part of future work.
4.4 AMD EPYC 7282
Figure 8 shows the results from the same round of experiments, this time carried out on the AMD EPYC 7282 processor. For reference, in this case we only include in the comparison BLIS as AMD’s native library (AOCL) is just a version of BLIS in disguise. Given that the AMD EPYC 7282 supports AVX2 (256-bit SIMD units) and features 16 256-bit SIMD registers, we developed and tested micro-kernels of dimensions \(16\times 6\), \(24\times 4\). In addition, we mimicked AOCL-BLIS to develop two additional micro-kernels, of dimensions \(6 \times 16\) and \(4 \times 6\), that operate with matrices stored by rows and avoid packing the entries of A into the buffer \(A_c\) for the baseline algorithm B3A2C0. The results in the figure show that our implementation for gemm delivers a GFLOPS rate that is comparable in most cases to that obtained with the BLIS realization, showing relevant benefits for some special layers but also loosing by a non-negligible margin in a few others.

Performance of the best algorithm+micro-kernel on AMD EPYC 7282
4.5 Discussion
To close this section, we link the ultimate reasons which determine the performance of the different micro-kernels with the analytical model in [10]. For this purpose, we expose the relationship using as a workhorse the BLIS baseline algorithm (B3A2C0), the NVIDIA Carmel processor, and layer #1 of ResNet50 v1.5. For that layer, the dimensions of the GEMM are given by the following tuple: \((m,n,k)=(12544,64,147)\).
For that particular processor/layer, the analytical model in [10] reports that, due to the reduced k-dimension of the problem, the micro-panel of \(B_c\) that targets the L1 cache only occupies 10.8% of that memory level on the NVIDIA Carmel for the \(m_r \times n_r = 8 \times 12\) micro-kernel that is integrated BLIS. (In theory, this micro-kernel should have occupied up to 50% with that micro-panel of \(B_c\), reserving the rest of the L1 cache for entries from the A, B operands). An additional problem arises for the L2 cache: With the cache configuration parameters fixed in BLIS to \(m_c=896,k_c=512\) for the NVIDIA Carmel, the small m-dimension of the problem yields that the buffer \(A_c\) only occupies 25.1% of the L2 cache. (In theory, for the \(8\times 12\) micro-kernel, the buffer \(A_c\) should have occupied up to 81.2% of that memory level leaving the rest for entries of C, B.)
Let us next consider a micro-kernel of dimension \(m_r \times n_r = 4\times 24\). (The optimal micro-kernel among those that we evaluated for this layer.) In this case, the occupancy of the L1 cache by the micro-panel of \(B_c\) grows to 21.5%, which is clearly superior to that observed for the (BLIS) \(8 \times 12\) micro-kernel. In addition, for the \(4 \times 24\) micro-kernel, the utilization of the L2 cache by the buffer \(A_c\) is 75.0% which, according to the analytical model, is the maximum that should be dedicated to this operand (in each case).
In summary, there is a clear theoretical benefit from adopting an \(m_r \times n_r=4 \times 24\) micro-kernel for this particular case, which is conformal with the performance advantage that is reported in Fig. 6 when using the “Generic” (\(4 \times 24\)) micro-kernel versus BLIS.
5 Concluding remarks and future work
Building efficient code for a given computational kernel with minimal effort has been always a great challenge. With each new architecture, it becomes necessary to revisit the kernel in order to obtain an optimized version. This is the case, for example, of numerical linear algebra libraries in general, and of matrix multiplication in particular.
The advent of deep neural networks together with an explosion in the variety of computing devices to run DL applications, especially for the inference phase, require a significant step aimed at finding optimal methodologies to produce efficient matrix multiplication codes. In particular, depending on the target neural model layer, the dimensions of the intervening matrices are in general different; consequently, so is the performance of a general matrix multiplication kernel. Therefore, it is necessary to design a collection of computational kernels optimized for the matrix product, not only for the underlying architecture, but also for each dimension of the operands.
The use of intrinsics greatly facilitates vector programming since it allows to work at a high level, leaving in the hands of the compiler the translation-to-assembler and other optimization tasks which are difficult for the programmer. However, the different ISAs (instruction set architectures) still complicate optimizing the code for the wide range of processors within reach.
Given all of the above, combining all the necessary optimizations specific to each architecture and computational kernel in a single code is a difficult challenge. To tackle with this issue, in this work we have proposed a unique generic code for several (very different) architectures which are spread use nowadays. This generic routine, implemented in C together with a reduced set of particular macros for each processor type, allows generating optimized code based on vector intrinsics, to obtain a varied set of micro-kernels on which a matrix multiplication operation is based.
The experimental results, obtained with two ARM-based processor architectures, offer some optimism about the future of the proposed solution. Although we have not achieved the best performance with the generic kernel in all cases, the reduced implementation effort required for this purpose leads us to conclude that the trade-off is favorable to the proposed solution.
Data availibility
BLIS is available at https://github.com/flame/blis OpenBLAS is available at https://github.com/xianyi/OpenBLAS ARMPL is available at https://developer.arm.com/downloads/-/arm-performance-libraries
Notes
The AOCL library from AMD is actually a compilation of BLIS with the proper configuration flags, that we have used in our evaluation.
References
Dongarra JJ, Du Croz J, Hammarling S, Duff I (1990) A set of level 3 basic linear algebra subprograms. ACM Trans Math Softw 16(1):1–17
Goto K, van de Geijn RA (2008) Anatomy of a high-performance matrix multiplication. ACM Trans Math Softw 34(3):12:1-12:25
Van Zee FG, van de Geijn RA (2015) BLIS: a framework for rapidly instantiating BLAS functionality. ACM Trans Math Softw 41(3):14:1-14:33
Xianyi Z, Qian W, Yunquan Z (2012) Model-driven level 3 BLAS performance optimization on Loongson 3A processor. In: 2012 IEEE 18th International Conference on Parallel and Distributed Systems (ICPADS)
Smith TM, van de Geijn RA (2019) The MOMMS family of matrix multiplication algorithms. CoRR, vol. abs/1904.05717. [Online]. Available: http://arxiv.org/abs/1904.05717
Gunnels JA, Gustavson FG, Henry GM, van de Geijn RA (2004) A family of high-performance matrix multiplication algorithms. In: Proc. 7th Int. Conf. on Applied Parallel Computing: State of the Art in Scientific Computing, ser. PARA’04, pp 256-265
Castelló A, Igual FD, Quintana-Ortí ES (2022) Anatomy of the BLIS family of algorithms for matrix multiplication. In: 2022 30th Euromicro International Conference on Parallel, Distributed and Network-based Processing (PDP), pp 92–99
Chellapilla K, Puri S, Simard P (2006) High performance convolutional neural networks for document processing. In: International Workshop on Frontiers in Handwriting Recognition
Barrachina S, Dolz MF, San Juan P, Quintana-Ortí ES (2022) Efficient and portable GEMM-based convolution operators for deep neural network training on multicore processors. J Parallel Distrib Comput 167(C):240–254
Low TM, Igual FD, Smith TM, Quintana-Ortí ES (2016) Analytical modeling is enough for high-performance BLIS. ACM Trans Math Softw 43(2):12:1-12:18
Williams S, Waterman A, Patterson D (2009) Roofline: an insightful visual performance model for multicore architectures. Commun ACM 52(4):65–76
Dowd K, Severance CR (1998) High performance computing, 2nd ed. O’Reilly
Zee FGV, Smith TM, Marker B, Low TM, Geijn RAVD, Igual FD, Smelyanskiy M, Zhang X, Kistler M, Austel V, Gunnels JA, Killough L (2016) The BLIS framework: experiments in portability. ACM Trans Math Softw 42(2):1–19
Smith TM, van de Geijn R, Smelyanskiy M, Hammond JR, Zee FGV (2014) Anatomy of high-performance many-threaded matrix multiplication. In: Proc. IEEE 28th Int. Parallel and Distributed Processing Symp. ser. IPDPS’14, pp 1049–1059
He K, Zhang X, Ren S, Sun J (2016) Deep residual learning for image recognition. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp 770–778
Simonyan K, Zisserman A (2014) Very deep convolutional networks for large-scale image recognition, arXiv preprint arXiv:1409.1556
Szegedy C, et al. (2014) Going deeper with convolutions, CoRR, vol. abs/1409.4842, [Online]. Available: http://arxiv.org/abs/1409.4842
Acknowledgements
We thank the Barcelona Supercomputing Center for granting the access to the Fujitsu A64FX system were the developments and tests were performed.
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature. This work was supported by the research projects PID2020-113656RB-C22, RTI2018-093684-B-I00, and PID2021-126576NB-I00, of MCIN/AEI/10.13039/501100011033 and by “ERDF A way of making Europe”, and CM via Multiannual Agreement with Complutense University in the line Program to Stimulate Research for Young Doctors in the context of the V PRICIT under projects PR65/19-22445 and CM S2018/TCS-4423. A. Castelló is a FJC2019-039222-I fellow supported by MCIN/AEI/10.13039/501100011033. H. Martínez is a postdoctoral fellow supported by the Consejería de Transformación Económica, Industria, Conocimiento y Universidades de la Junta de Andalucía.
Author information
Authors and Affiliations
Contributions
AC implemented the micro-kernel generator script, wrote the results section of the paper, and mentored GA who executed the Carmel processor experiments. GA also generated the Figures for this architecture. HM, implemented the micro-kernels for the Fujitsu A64FX and AMD Rome platforms, executed the tests over these devices, and generated their Figures. PA-J and FDI wrote several sections of the paper as well as conducted distinct research steps. ESQ-O guided the overall research, wrote different sections, and revised the entire paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alaejos, G., Castelló, A., Martínez, H. et al. Micro-kernels for portable and efficient matrix multiplication in deep learning. J Supercomput 79, 8124–8147 (2023). https://doi.org/10.1007/s11227-022-05003-3
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11227-022-05003-3