
Abstract
Soft and flexible strain piezoresistive sensors are gaining interest in wearable and robotic applications, but resistance relaxation limits the widespread use of the sensors. As soft, flexible, and stretchable sensors, they can easily be retrofitted into any existing robotic hand. To understand the resistance relaxation of stretchable sensors, three different elastomers were used to fabricate soft piezoresistive sensors. The experimental results showed that the sensor has good linearity and scalability while their resistance is strongly influenced by the stretching speed and modulus of the elastomer. Thus, the Kevin Voigt model was adopted to describe the sensor’s change of resistance during the stretching process. The model is sufficient to describe the change of resistance of the carbon black/elastomer filler when the sensors are stretched before the fracturing of the conductive filler. However, when the filler fractures, the model is invalid. The behavior indicates that the elongation of the sensor must not exceed the strain that causes the filler to fracture.
Similar content being viewed by others


Explore related subjects
Find the latest articles, discoveries, and news in related topics.Avoid common mistakes on your manuscript.
1 Introduction
The underactuated actuated hands (URH) have the advantages of energy savings, material savings, space savings, and lighter, making them widely studied [1,2,3,4]. Despite the benefits of URH, there has been relatively limited use of such systems in haptic applications. It is due to the kinematic uncertainty of finger behavior after encountering unknown objects in arbitrary poses [5].
To solve the kinematic uncertainty, it becomes necessary to mount sensors on the hand, determining the turning or bending of each joint. However, due to limited space and weight, traditional position sensors are not suitable for the URH. Stretchable sensors, exhibiting promising perspectives in applications, have been widely explored [6,7,8,9], where the sensor will elongate when a finger bents, causing a corresponding change in resistance. The resistance correlates to the bending angle of a joint. Generally, piezoresistive sensors have the advantages of easy fabrication despite the disadvantages of nonlinear response, stress relation, and hysteresis. However, come stretch sensors use capacitor structure to determine the bending of a joint. They are sensitive and precise, but parasitic capacitance and susceptibility to the environment are serious issues that are difficult to solve. Piezoelectric sensors can only sense dynamic signals. Therefore, piezoresistive sensors are preferred in many applications [10,11,12]. In the field of robotics, the stretchable piezoresistive sensors with carbon black/silicone composite were fabricated, and experimental results demonstrated that they have a high gauge factor and acceptable hysteresis in most robotic hand applications [13]. In the literature [14], piezoresistive stretchable sensors were mounted on the fingers of a URH, and tests showed the sensors have promising applications in classifying the shapes of grasped objects. Further, the use of these sensors allows them to be retrofitted into an existing URH.
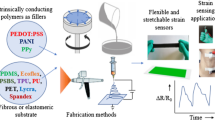
Among various stretchable piezoresistive sensors, polymeric composites filled with conductors, that combine appropriate electrical properties of the conductive fillers with excellent mechanical compliance of the flexible matrices, exhibit a promising perspective [15, 16]. Carbon-based materials such as carbon nanotubes (CNTs), graphene-based materials, and carbon black (CB) have been extensively used as conductive fillers in wearable sensors because of their excellent electrical conductivity, low cost and potential for mass production, high chemical, and thermal stability, inherent flexibility, and ease of chemical functionalization [17,18,19,20]. Many commercially available materials, including poly (dimethylsiloxane) (PDMS), Ecoflex polyurethane (PU), epoxy, poly (vinylidene fluoride) (PVDF), and polymethyl methacrylate (PMMA), are used as polymeric matrices [21,22,23,24].
Because of the inherent viscoelasticity of the matrix phase, polymer composites are prone to creep and stress relaxation, making it a challenge when considering composites for long-term applications [25,26,27,28]. Even worse is the effect of stress relaxation on resistance. Therefore, much literature has concerned the relationship between stress and resistance, hoping to understand the change of resistance via the relationship.
Several models were proposed to relate the electrical resistance and the strain of stretchable sensors. The relaxation of the electrical resistance relaxation can be represented by a time-dependent and strain-dependent function [29]. Wang et al. [30] proposed a predicted resistance model for fabric strain sensors based on carbon-particle-filled conductive polymer and knitted fabric substrate. Can-Ortiz et al. [31] described the behavior of the electrical resistance as a function of time. Chen et al. [32] proposed that the resistance of polymer-based conductive composites is strongly dependent on uniaxial pressure. Zhai et al. [33] proposed the relationship between the relaxation of the resistance with time and the relaxation rate index of the material. In addition, Zheng et al. [34] proposed an empirical expression similar to the Burgers equation that could be applied to fit the data for both the resistance creep and the resistance relaxation.
The research mentioned above focused on the relaxation of the electrical resistance but the resistance change during stretching is ignored. Here, a new model is proposed to describe the behavior of the electrical resistance of large strain piezoresistive sensors when they are stretched and remain statically at a certain strain. This is important when applied to a URH to determine the bending of the finger joints because when the joints are static, they will cause the sensors to be in a certain static strain condition. This study is based on flexible strain piezoresistive sensors made from three different elastomers.
2 Experimental Details
2.1 Materials and Sample Preparation
In our previous study [13], the conductive Ecoflex 00–30 and CB composite (filler) were used as the strain sensing material. Figure 1 presents the fabrication of the piezoresistive strain sensors. Ecoflex 00-30 substrate was initially cast into a rectangular mold and then cured at 80 °C for an hour. Next, the conductive filler was prepared by mixing CB (50 nm particles size) and Ecoflex 00–30 with a 1: 9 weight ratio of CB and Ecoflex. With the aid of a stencil, the mixture was deposited on the cured Ecoflex 00-30 in a U-shape and doctor-bladed and then left to cure in the oven at 80 °C overnight. Finally, another layer of Ecoflex 00-30 was cast on top and cured at 80 °C. The overall width is approximately 2–3 mm, and the length of the sensor is 30 mm. Figure 2 presents the actual photographs of the fabricated sensors.

The design of the sensor and the molds and stencil used in the fabrication process

The piezoresistive strain sensor with a 2–3 mm wide trace
The detailed fabrication, test rigs, and measurement methods of the sensors were presented in Ref. [35]. Figure 3 presented the resistance change when it was stretched up to 5 mm elongation (a strain of 0.167). Overall, there is a linear relationship between resistance and strain in that stretching range. However, the figure shows resistive relaxation (when strain is maintained, the resistance decreases), and resistance change in the whole process is complex. Therefore, more experiments have been conducted to analyze the characteristics of the sensors.

The stretching properties of the sensor
2.2 Experimentation and Measurement
In this study, three materials, whose properties are shown in Table 1, were used to fabricate the sensors. The three materials were used to make these sensors. These materials were used as the substrates and also mixed with CB (1:9 weight ratio) as the piezoresistive materials.
Figure 4 shows the hysteresis of the three sensors stretched up to a 5 mm (a strain of 0.167) elongation at two extension/retraction speeds. The arrows to the right in Fig. 4 refer to the extension phase and the arrows to the left refer to the retraction phase. The conclusions can be drawn from the curves.
-
The degree of hysteresis is affected by extension/retraction speed. Higher stretching speed leads to higher hysteresis.
-
The tensile strength of the material affects the degree of hysteresis. Low tensile strength produces high hysteresis.
-
During the extension of the sensor, the resistance increases in an approximately linear fashion. However, during the retraction stage, the sensors exhibit some nonlinearity. In addition, at the stretching speed of 5 mm/s, the resistance of EcoflexTM00-50 tends to peak when the strain is approximately 0.12, and then the resistance decreases as the strain increases. Two reasons cause the phenomenon. One is that Ecoflex™ 00–50 is a much stiffer material than the other two elastomers, and the other is the impact of the deceleration at the end of the stretching process.
-
The sensors made of EcoflexTM00-30 and VytaflexTM00-10, which have the same tensile strength, exhibit similar characteristics. Hence, material stiffness does affect the sensor's characteristics.
Figure 5 shows the resistance changes of the three sensors with time when they were stretched up to a strain of 0.167 and maintained at that strain. The solid curve presents the extension speed of 1 mm/s, and the dotted curve is for 5 mm/s. The peaks of the three curves in Fig. 5 indicate the stretching begins to decelerate and enter the state of resistance relaxation as the resistance reduces with time as the strain is maintained constant.
Figure 6 shows the rate of resistance change when the sensor is extended up to a strain of 0.167 and then maintained. The conclusions can be drawn from Figs. 5 and 6.
-
The extension/retraction speed affects the characteristics of the resistance change of the sensors.
-
During the resistance relaxation, the rate of resistance change is high and then slowly drops over time.
-
Stiffer materials (Ecoflex™ 00–50) lead to a faster resistance relaxation, which means the resistance reaches the peak value at a lower strain.
-
The sensors made of EcoflexTM00-30 and VytaflexTM00-10 exhibit similar characteristics as they have similar stiffness.

The hysteresis of the three different sensors stretched up to a strain of 0.167

The resistance change and relaxation when stretched and maintained at a 5 mm elongation (a strain of 0.167)

The rate of change of the resistance when stretched and maintained at a 5 mm elongation (a strain of 0.167) with a different extension/retraction rate of a 1 mm/s and b 5 mm/s
According to Eq. (1) [30] and (2) [31], the resistance of the sensors is related to the viscoelastic relaxation time, which can roughly explain the above conclusion.
where \(R\left(\infty \right)\) denotes the limitation of resistance at infinite time, \({r}_{i}\) and \({\lambda }_{i}\) are coefficient and relaxation indices, respectively.
where \(a, b,\) and \(c\) are fitting constants for each material architecture and \({\tau }_{R}\) represents the viscoelastic relaxation time under a constant strain for the Burgers model.\({k}_{2}\) is the elastic constants of the spring, and \({\eta }_{2}\) is the viscosity coefficient of the dash-pots.
Similar experiments up to 0.333 strain (10 mm elongation) were conducted to investigate resistance relaxation. It can be seen from Fig. 7 that the conclusions from Fig. 5 are still applicable. In addition, it is seen in Fig. 7 that at the 1 mm/s stretching speed, the resistance reaches to peak at the strain of about 0.23, which means that if stretched further is not useful as a strain sensor because the resistance starts to decrease. Hence in the resistance versus strain plots in Fig. 7, the relationship can be divided into two regions; region A (resistance increase with strain) and B (resistance reduces with strain). At a high extension/retraction rate (5 mm/s), the hysteresis is large and becomes less accurate.

The hysteresis of the three different sensors, when stretched up to a strain of 0.333
Figures 8 and 9 show shows the change in resistance of the three sensors with time when the strain is maintained over time, in this case, a strain of 0.333. The solid curve presents the extension speed of 1 mm/s, and the dotted curve is for 5 mm/s. Interestingly, the plots in Figs. 8 and 9, where they were stretched to a higher strain, exhibit different characteristics compared to those in Figs. 5 and 6. The reason behind this is believed to be the fracturing of the carbon black/Ecoflex conductive filler at higher strain (0.333 versus 0.167) and leading to the nonlinearity of the coefficients \(k\) and \(\eta \).

The resistance change and relaxation when stretched and maintained at a 10 mm elongation (0.333 strain)

The rate of change of the resistance when stretched and maintained at a 10 mm (a strain of 0.333) elongation with a different extension/retraction rate of a 1 mm/s and b 5 mm/s
From Figs. 7, 8, and 9, it is clear that the resistance reduces after reaching a peak resistance at a strain of 0.23. The exact mechanism causing this is unclear. Wang et al. [36] explained it using Eq. (3)
where R is the resistance of one single effective conductive path, \(L\) is the number of particles forming one conducting path, \(m\) is the electron mass, \(e\) is the electron charge, \(h\) is Planck's constant, s is the thickness of the insulating film, \(\varphi \) is the height of the potential barrier between the adjacent particles, and \({a}^{2}\) is the effective cross-sectional area, where the tunneling occurs.
According to Eq. (6), the extension makes the gaps between CB particles larger, increasing the electrical resistance of one single effective conductive path. The further extension induces the formation of the effective conductive paths, leading to an increase in the number of effective conductive paths. This change contributes to the decrease of the electrical resistance of the composite.
On the other hand, Yamaguchi et al. [37] believed that extending the sensor in tension results in an initial increase of resistance due to the elastomer's breakdown of theCB network structure. As the strain is increased in tension continuously, the measured resistance falls due to an orientation effect that results from the nonspherical shape of the filler particles.
To test the assumption above, a simple loading experiment was conducted. The test rig and method were presented in the literature [35]. In this experiment, three different loads are suspended from one end of the sensor, and the other end of the sensor is fixed to a sensor measuring the tension force. Figure 10 shows that when the sensor was stretched with a load up to 75 g. As the load increases, the strain increases, and the resistance increases. However, when the load is increased to greater than 40 g, the resistance dramatically drops, indicating a significant change in the effective conductive.

The change in resistance with a change in load
Considering the targeted application in a URH, where the bending of the joints will not cause the strain sensor to exceed a strain of 0.23, the sensors are still deployable for use in a URH.
3 Results and Discussion
Because of the time-dependent property exhibited by the stress relaxation of the sensor, it is more reasonable to use the viscoelastic model to analyze and discuss it. Viscoelastic behavior of polymer material can be studied with linear or nonlinear models.
Much work has been done to understand the change in resistance and relaxation. The stress relaxation time fitted following the Kohlrausch–Williams–Watts model evidenced good accuracy [38, 39]. The linear viscoelastic behavior of polymer material was modeled by hereditary integral [40].
Research [41] demonstrated that stress relaxation of the substrate does not influence the output signal of the capacitive-based sensors, which shows that the strains of stretchable sensors in stress relaxation are nearly invariable. Therefore, it is reasonable to assume that the resistance of stretchable piezoresistive sensors is directly related to the stress of the material instead of strain. In addition, the experimental results above reflect that the stress of the sensor is related to the strain and strain speed, which indirectly affects the sensor's resistance.
Rheological models are used to analyze the response of polymer materials when they are stretched/extended. Given the prior experiments and results, the Kelvin (or Voigt) model, which consists of a spring and dash-pot in parallel (Fig. 11), is adopted to analyze the resistance of the sensors in the subsequent studies.

The Kelvin model for the sensors
In Fig. 10, the following can be obtained.
where \(E\left(t\right)\) is the relaxation modulus function, \(\sigma \) is the stress, \(\varepsilon \) is the strain, and \(\eta \) is the viscosity coefficient.
Equation (4) explains that stress is related to strain and strain speed, matching the experimental results above. The relaxation modulus has different expressions. Reports in [42, 43] expressed the modulus as Eqs. (5), (6), and (7), respectively.
where, \(\tau \) and \({\tau }_{i}\) are the viscoelastic relaxation time, \({E}_{\infty },\) \({E}_{i}\) and \({A}_{i}\) are coefficients.
Equations (5), (6), and (7) are similar despite their differences in expressions. Considering these equations and Eq. (4), as well as the deduction made from the previous experiments (i.e., the change of resistance is related to the stretching speed and also to the initial value of resistance in the resistance relaxation process), this study proposes the resistance model as Eq. (8) when the sensors are being stretched, and Eq. (9) describes the resistance relaxation process. The two equations have the same viscoelastic relaxation time in the two processes.
where, \({r}_{0}{e}^{-\frac{t}{{\tau }_{0}}}\) and \({{r}_{0}^{^{\prime}}e}^{-\frac{t}{{\tau }_{0}}}\) are the resistive relaxation modulus function, \(v\) is the stretching speed, and \({R}_{0}\) is the initial value of resistance in the resistance relaxation process.
When the resistance data collected in the previous tests were fitted in OriginPro software with Eqs. (8) and (9), the resistance functions of the three sensors were obtained. The simulated and experimental results are compared in Fig. 12, where the sensors were stretched only up to a strain of 0.167. As the sensors were stretched to a higher strain (0.23), the resistance decreases with strain, which means the Kevin-Voigt model is not valid at high strain.

The comparison of 5 mm-elongation (a strain of 0.167) experimental and simulated data
As in Fig. 7, region A is the useful region to be used as a strain sensor. Hence, limiting to only region A, Table 2 shows the models describing the extension and retraction processes. The results show that Eqs. (8) and (9) can describe the resistance change of stretch sensors during extension and retraction phases at different extension/retraction speeds.
Overall, despite the good correlation between the simulated and experimental results as shown in Fig. 12, there are some discrepancies. The discrepancies can be reduced by further adjusting Eqs. (8) and (9), where the relative relaxation function can take the form of Eq. (6). If better fitting accuracy is needed, the form of Eq. (7) can be used.
The above mathematical models can be used to improve the accuracy of the sensor when applied to a URH.
4 Conclusions
These soft stretch piezoresistive sensors have many applications in the field of robotics. This work shows the fabrication of soft stretch piezoresistive sensors using a mixture of carbon black and elastomer. Tests show that the sensor has reasonable linearity and tensile properties.
In the study, three elastomers were used to fabricate the sensors separately, and the sensors were tested at two strain rates (1 mm/s and 5 mm/s) up to a specific strain. The results show that the hysteresis of the sensors decreases as the tensile strength of the elastomer increases as they are stiffer as it has a faster relaxation rate. Operating the sensor at a high extension/retraction rate results in larger hysteresis.
Based on the experimental results and analytical conclusions, the study proposes a Kevin-Voigt model to express stretching and relaxation behaviors, which takes into account the amount of strain and its extension/retraction rate as parameters, and the model can be applied to the relaxation of resistance when the sensor is maintained at a specific strain at different extension/retraction rate up to a strain 0.23. The simulation results are in agreement with the experimental results.
The proposed model that was derived empirically from experiments incorporates the effect of stretching speed on the resistance and the effect of the initial value of resistance on the relaxation behavior of resistance. This is based on the assumption that the materials' properties remain constant during stretching. Further, as the model is derived experimentally, it is bound by the conditions set forth during the experimentation, which are based on the requirements for a URH.
The inherent viscoelasticity of the composites leads to the resistance relaxation of the stretchable sensors, which reduces the accuracy of the sensors. The proposed model can be used to accurately predict the change of resistance during stress relaxation and can predict final resistance when applied to a URH.
References
Kappassov, Z., Corrales, J. A., & Perdereau, V. (2015). Tactile sensing in dexterous robot hands: A review. Robotics and Autonomous Systems, 74, 195–220.
Hanna, Y., Mehdi, B., & Kaspar, A. (2011). Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sensors and Actuators. A. Physical, 167(2), 171–187.
Shan, L., Joao, B., Ravinder, D., & Hongbin, L. (2017). Robotic tactile perception of object properties: A review. Mechatronics, 48, 54–67.
Kirthika, S. K., Chen, P. Y., & Ren, H. L. (2019). A review of printable flexible and stretchable tactile sensors. Research, 2019, 3018568–3018632.
Liu, H., Yang, D. P., Fan, S. W., & Cai, H. G. (2016). On the development of intrinsically-actuated, multisensory dexterous robotic hands. Robotech, 3(1), 1–9.
Kawasaki, H., & Mouri, T. (2019). Humanoid robotic hand and its applied research. Journal of Robotics and Mechatronics, 31(1), 16–26.
Yousefa, H., Boukallela, M., & Althoeferb, K. (2011). Tactile sensing for dexterous in-hand manipulation in robotics-A review. Sensors and Actuators A: Physical, 167(2), 171–187.
Li, J., Fang, L. C., Sun, B. H., Li, X. X., & Kang, S. H. (2020). Review-recent progress in flexible and stretchable piezoresistive sensors and their applications. Journal of the Electrochemical Society, 167(3), 37561.
Wang, W., Yang, S., Ding, K., Jiao, L., Yan, J., Zhao, W., Ma, Y. Y., Wang, T. Y., Cheng, B. W., & Ni, Y. H. (2021). Biomaterials- and biostructures Inspired high-performance flexible, stretchable strain sensors: A review. Chemical Engineering Journal, 425, 129949.
Heo, J. S., Hossain, M. F., & Kim, I. (2020). Challenges in design and fabrication of flexible/stretchable carbon- and textile-based wearable sensors for health monitoring: A critical review. Sensors, 20(14), 3927.
Kanoun, O., Bouhamed, A., Ramalingame, R., Bautista-Quijano, J. R., Rajendran, D., & Ammar, A. H. (2021). Review on conductive polymer/CNTs nanocomposites based flexible and stretchable strain and pressure sensors. Sensors, 21(2), 341.
Chen, J. W., Yu, Q. L., Cui, X. H., Dong, M. Y., Zhang, J. X., Wang, C., Fan, J. C., Zhu, Y. T., & Guo, Z. H. (2019). An overview of stretchable strain sensors from conductive polymer nanocomposites. Journal of Materials Chemistry. C, Materials for Optical and Electronic Devices, 7(38), 1171–1173.
Devaraj, H., Giffney, T., Petit, A., Assadian, M., & Kean, A. C. (2018). The development of highly flexible stretch sensors for a robotic hand. Robotics, 7(3), 54.
Shi, Y., Jayden, C., & Kean, Aw. (2022). Soft and flexible large-strain piezoresistive sensors: On implementing proprioception, object classification and curvature estimation systems in adaptive, human-like robot hands. Sensors & Actuators: A. Physical., 341, 113609.
Chang, X. H., Chen, L. R., Chen, J. W., Zhu, Y. T., & Guo, Z. H. (2021). Advances in transparent and stretchable strain sensors. Advanced Composites and Hybrid Materials, 4(3), 435–450.
Yan, T., Wang, Z., & Pan, Z. J. (2018). Flexible strain sensors fabricated using carbon-based nanomaterials: a review. Current Opinion in Solid State & Materials Science, 22(6), 213–228.
Amjadi, M., Yoon, Y. J., & Park, I. (2015). Ultra-stretchable and skin-mountable strain sensors using carbon nanotubes-Ecoflex nanocomposites. Nanotechnology, 26(37), 375501–437550.
Liu, Y., Wang, H., Zhao, W., Zhang, M., Qin, H. B., & Xie, Y. Q. (2018). Flexible, stretchable sensors for wearable health monitoring: sensing mechanisms, materials. Fabrication Strategies and Features. Sensors, 18(2), 645.
Zhao, S. F., Li, J. H., Cao, D. X., Zhang, G. P., Li, J., Li, K. Y., Yang, W., & W., Jin, Y.F., Sun, R. & Wong, C.P. (2017). Recent advancements in flexible and stretchable electrodes for electromechanical sensors: strategies, materials, and features. ACS Applied Materials & Interfaces, 9(14), 12147–12164.
Obaid, N., Kortschot, M. T., & Sain, M. (2017). Modeling and predicting the stress relaxation of composites with short and randomly oriented fibers. Materials, 10(10), 1207.
Ding, H., & Chen, J. K. (2019). Research on the resistivity attenuation law of cementitious conductive composites induced by stress relaxation. Construction & Building Materials, 206, 347.
Reis, P. N. B., Neto, M. A., & Amaro, A. M. (2019). Effect of hostile solutions on stress relaxation of carbon/epoxy composites. Polymer Degradation and Stability, 165, 60–67.
DaR, E. B. D., Linhares, F. N., Gabriel, C. F. S., De, S., Ana, F. M., & Furtado, C. R. G. (2018). Stress relaxation of nitrile rubber composites filled with a hybrid metakaolin/carbon black filler under tensile and compressive forces. Applied clay science, 151, 181–188.
Kost, J., Foux, A., & Narkis, M. (1994). Quantitative model relating electrical resistance, strain, and time for carbon black loaded silicone rubber. Polymer Engineering and Science, 34(21), 1628–1634.
Wang, X., Yang, B., Li, Q., Wang, F., & Tao, X. M. (2021). Modeling the stress and resistance relaxation of conductive composites-coated fabric strain sensors. Composites Science and Technology, 204, 108645.
Can-Ortiz, A., Abot, J. L., & Avilés, F. (2019). Electrical characterization of carbon-based fibers and their application for sensing relaxation-induced piezoresistivity in polymer composites. Carbon, 145, 119–130.
Chen, Y. L., Song, Y. H., Zhou, J. F., & Zheng, Q. (2005). Effect of uniaxial pressure on conduction behavior of carbon black filled poly (methyl vinyl siloxane) composites. Chinese Science Bulletin, 50(2), 101–107.
Zhai, T. L., Li, D. X., Fei, G. X., & Xia, S. H. (2015). Piezoresistive and compression resistance relaxation behavior of water blown carbon nanotube/polyurethane composite foam. Composites Part A, Applied Science and Manufacturing, 72, 108–114.
Zheng, Q., Zhou, J. F., & Song, Y. H. (2004). Time-dependent uniaxial piezoresistive behavior of high-density polyethylene/short carbon fiber conductive composites. Journal of Materials Research, 19, 2625–2634.
Rebollo, D. R. R., Pedro, P., & Molina, A. (2017). From 3 fingers to 5 fingers dexterous hands. Advanced Robotics, 31(19–20), 1051–1070.
Neha, E., Suhaib, M., Mukherjee, S., & Shrivastava, Y. (2021). Kinematic analysis of four-fingered tendon actuated robotic hand. Australian Journal of mechanical engineering. https://doi.org/10.1080/14484846.2021.1876602
Kontoudis, G. P., Liarokapis, M., Vamvoudakis, K. G., & Furukawa, T. (2019). An adaptive actuation mechanism for anthropomorphic robotic hands. Frontiers in Robotics and AI., 6, 47–47.
Ryu, W., Choi, Y., Choi, Y. J., Lee, Y. G., & Lee, S. (2020). Development of an anthropomorphic prosthetic hand with underactuated mechanism. Applied Sciences, 10(12), 4384.
Spiers, A. J., Liarokapis, M. V., Calli, B., & Dollar, A. M. (2016). Single-grasp object classification and feature extraction with simple robot hands and tactile sensors. IEEE Transaction on Haptics, 9(2), 207–220.
Shi, Y., & Kean, A.w.,. (2022). Multi-layered carbon-black/elastomer-composite-based shielded stretchable capacitive sensors for the underactuated robotic hand. Robotics, 11, 58.
Wang, L., Ding, T. H., & Wang, P. (2009). Research on stress and electrical resistance of skin-sensing silicone rubber/carbon black nanocomposite during decompressive stress relaxation. Smart Material Structure., 18, 065002.
Yamaguchi, K., Busfield, J. J. C., & Thomas, A. G. (2003). Electrical and mechanical behavior of filled elastomers. I the effect of strain. Journal of Polymer Science Part B Polymer Physics., 41(17), 2079–2089.
Reis, P. N. B., Silva, M. P., & Santos, P. (2019). Stress relaxation in delaminated carbon/epoxy composites. Fibers and Polymers., 20(6), 1284–1289.
Chollet, E. R., Stringer, J., Kelly, P., Bowen, C., & Kean, A. C. (2020). The effect of barium titanate ceramic loading on the stress relaxation behavior of barium titanate-silicone elastomer composites. Polymer Engineering and Science, 60(12), 3086–3094.
Tang, T., & Felicelli, S. D. (2015). Computational evaluation of effective stress relaxation behavior of polymer composites. International journal of engineering science, 90, 76–85.
Eshwar, R. C., Jonathan, S., Piaras, K., Chris, B., & Kean, A. C. (2021). Mechanical behaviour of large strain capacitive sensor with barium titanate ecoflex composite used to detect human motion. Robotics, 10(2), 69.
You, G. X., Wang, C. Y., Mei, S. Q., Yang, B., & Zhou, X. W. (2019). Corrigendum: Model and prediction of stress relaxation of polyurethane fiber. Materials Research Express, 6(4), 49502.
Zhou, J. L., Tan, Y. S., Song, Y., Shi, X., Lian, X. L., Zhang, C. Q., & Chun, Q. (2021). Viscoelastic mechanical behavior of periodontal ligament: Creep and relaxation hyper-viscoelastic constitutive models. Mechanics of Materials, 163, 104079.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yong, S., Aw, K. Modeling Electrical Resistance Behavior of Soft and Flexible Piezoresistive Sensors Based on Carbon-Black/Silicone Elastomer Composites. Sens Imaging 23, 22 (2022). https://doi.org/10.1007/s11220-022-00392-4
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11220-022-00392-4