
Abstract
Magnetic reconnection is a fundamental mechanism for the transport of mass and energy in planetary magnetospheres and astrospheres. While the process of reconnection is itself ubiquitous across a multitude of systems, the techniques used for its analysis can vary across scientific disciplines. Here we frame the latest understanding of reconnection theory by missions such as NASA’s Magnetospheric Multiscale (MMS) mission for use throughout the solar system and beyond. We discuss how reconnection can couple magnetized obstacles to both sub- and super-magnetosonic upstream flows. In addition, we address the need to model sheath plasmas and field-line draping around an obstacle to accurately parameterize the possibility for reconnection to occur. We conclude with a discussion of how reconnection energy conversion rates scale throughout the solar system. The results presented are not only applicable to within our solar system but also to astrospheres and exoplanets, such as the first recently detected exoplanet magnetosphere of HAT-11-1b.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Magnetic reconnection has been observed as a ubiquitous process in the space environment of magnetized obstacles embedded in collisionless plasmas. The most comprehensive studies of reconnection have taken place at Earth, where not only are there multi-point and multi-scale in-situ observations that elucidate the physics of reconnection itself, but a ground network of magnetometers and radars that can track global dynamics and provide geomagnetic indices to correlate with upstream conditions. Other articles in this collection have provided comprehensive reviews of the latest reconnection theory and observations developed as part of MMS-era exploration of Earth’s magnetosphere (Genestreti et al., Liu et al., Norgren et al., Graham et al., Stawarz et al., Fuselier et al., Hwang et al., Oka et al., this collection). Here we shift our focus beyond Earth and onto a diverse set of planetary magnetospheres and astrospheres that each provide unique laboratories for the testing and scaling of reconnection theory.
The magnetized bodies within and including our heliosphere, have been accessible to in situ exploration. Such missions beyond Earth are often limited to single-point measurements and constrained in the plasma instrumentation and telemetry rates available, especially when compared to multi-spacecraft formations like THEMIS, Cluster, or MMS at Earth. There are also no corresponding ground-based observations or upstream monitors to provide global activity indices for each planet. The instruments deployed on extraterrestrial missions are nonetheless highly capable and have been used to obtain tremendous insight into the dynamics of planetary magnetospheres and our heliosphere. Overall, there have been sufficient observations to characterize the effective size of an obstacle to the upstream flow and obtain critical information about plasma properties and magnetic field configurations needed to parametrize the role of reconnection at a given system.
This paper is not intended to provide an in-depth study of different planetary magnetospheres and the relative importance of magnetic reconnection in each system. There are a number of comprehensive studies available (Bagenal 2013; Kivelson 2007, and Kivelson and Bagenal 2014) that are highly relevant and will be leveraged throughout this study. Instead, here we attempt to scale the discoveries from recent missions like MMS about the microphysics of reconnection to the global dynamics of a planetary magnetosphere or astrosphere. We also attempt to link the terminology and approaches used by the planetary magnetosphere community to those of the reconnection theory community to maximize the application of MMS-era findings to ongoing, previous, and future studies of reconnection across and beyond the solar system.
We begin with a general discussion of flow around magnetized obstacles in Sect. 2 and relevant considerations for parameterizing the reconnection process at the relevant magnetic boundary (e.g., magnetopause, heliopause). In Sect. 3, we then discuss the typical analyses undertaken at planetary magnetospheres in terms of reconnection theory. Section 4 then provides an overview of reconnection signatures observed throughout the solar system. Finally, in Sect. 5 we discuss the scaling of the reconnection energy available to a magnetized obstacle across the solar system and to exoplanets and astrospheres.
2 Flow Around Magnetized Obstacles
Plasma flows must divert around any embedded magnetized obstacle. The magnetosonic Mach number of this upstream plasma, defined as the ratio of the flow speed (\(\mathrm{V}_{\mathrm{U}}\)) to the magnetosonic speed (\(\sqrt{}(\mathrm{V}_{\mathrm{A}}^{2} + \mathrm{V}_{\mathrm{S}}^{2})\)) dictates the relevant physical regime for the boundary interaction. Here, \(\mathrm{V}_{\mathrm{A}}\) is the plasma Alfvén speed (\(B/\sqrt{}(\mu _{\mathrm{o}}\rho )\)) and \(\mathrm{V}_{\mathrm{S}}\) is the plasma sound speed (\(\sqrt{}(\gamma \mathrm{P}/\rho )\)), where \(\rho \) is the mass density, \(\gamma \) is the ratio of specific heats, often taken as 5/3, \(\mu _{\mathrm{o}}\) is the permeability of vacuum, \(B \) is the magnetic field magnitude, and \(P\) is the thermal pressure. Upstream flow regimes can vary from sub-magnetosonic (\(\mathrm{M}_{\mathrm{MS}} < 1\)), largely in the case of moons embedded in planetary magnetospheres (e.g., Ganymede and Triton), to marginally-magnetosonic (\(\mathrm{M}_{\mathrm{MS}} \sim 1\)) in the case of our heliosphere embedded in the Local Interstellar Medium (LISM) flow, to super-magnetosonic (\(\mathrm{M}_{\mathrm{MS}} >1\)) like planetary bodies embedded in the solar or stellar winds. A summary of typical values of upstream conditions at magnetized bodies reported in and including the heliosphere, and at HAT-P-11b, a Neptune-like exoplanet recently reported to have a magnetosphere (Ben-Jaffel et al. 2022), are included in Table 1.
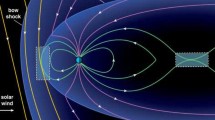
As shown in Fig. 1, in the \(\mathrm{M}_{\mathrm{MS}} \ll 1\) case, upstream plasmas interact directly with a magnetized obstacle. In this scenario, standing Alfvén waves generated at the magnetopause boundary propagate away from the obstacle and into the flow, forming a set of so-called “Alfvén wings” whose angles depends on upstream \(\mathrm{M}_{\mathrm{A}}\) (Neubauer 1980). These wings carry Poynting fluxes that can be relevant for describing interactions with their host star or planet (Fischer and Saur 2022 and references therein). The magnetic field lines in Alfvén wings are analogous to the open-field lobes in an intrinsically magnetized planetary magnetosphere, and the effective obstacle to the upstream flow is highly flared, blunted, and quasi-cylindrical (Kivelson and Jia 2013). In the most common scenario in our solar system, the focus of most of this paper, the upstream super-magnetosonic solar wind is significantly heated and compressed at a planetary bow shock, forming a magnetosheath where the flow divertsaround the obstacle. In the \(\mathrm{M}_{\mathrm{MS}} \lesssim 1\) case (marginally sub-magnetosonic), a bow wave forms, where the upstream plasma is slightly heated and compressed over a long upstream distance before it reaches the magnetized body (e.g., heliopause (Zank et al. 2012)). In all regimes, the upstream magnetic field drapes over the embedded obstacle.

(After Kivelson and Jia 2013.) Illustration of magnetized bodies embedded in (a) sub-magnetosonic upstream flows, and (b) super-magnetosonic. The magnetosphere in (a) has no bow-shock, with a blunted magnetopause boundary encompassing Alfvén wings that form due to standing Alfvén waves generated at the interface. The magnetosphere in (b) has a well-defined bow shock and bullet-shape magnetopause boundary, with heated and compressed plasmas flowing around the obstacle in a magnetosheath
There is also a class of unmagnetized planetary bodies and moons (e.g., Mars, Venus, Titan) that exhibit magnetospheric-like behavior. In these situations, the upper atmosphere and ionosphere become the obstacle to the impinging solar wind and provide a highly conductive layer that results in the formation of a so-called ‘induced magnetosphere.’ Here the induced magnetopause boundary (IMB) acts as the obstacle around which the upstream fields drape and interact (Luhmann et al. 2004; Ness et al. 1982). Some obstacles (e.g., Mars) have remanant crustal magnetic fields that represent a more complex planetary obstacle to the solar wind while providing a pathway for solar wind access (Wang et al. 2021; Harada et al. 2018; Fang et al. 2018). Mars, in particular forms a ‘hybrid magnetosphere’ (Axford 1991), sharing properties of both intrinsic and induced magnetospheres.
The relevant upstream conditions of flow-embedded obstacles within and including our own heliosphere have been measured by in situ spacecraft and range from sub-magnetosonic to super-magnetosonic regimes. However, unexplored exoplanetary magnetospheres and astrospheres spread throughout the universe also extend over this range of sampled regimes, with many exhibiting extreme values well beyond what we have observed to date (Khodachenko et al. 2013; Belenkaya et al. 2015). Some stars will act similar to our own (i.e., G-type), providing a super-sonic flow of stellar wind plasma throughout their astrospheres and upstream of planetary obstacles (Belenkaya et al. 2022). Others, such as M-type stars, have extremely strong magnetic fields that result in an Alfvén point, i.e., the astrocentric distance at which the flow speed exceeds the Alfvén speed, that extends far out into their respective astrospheres. This extension results in sub-magnetosonic flow upstream of closely orbiting exoplanets (Vidotto et al. 2014; Garraffo et al. 2016). However, regardless of the flow regime, the upstream fields and flows must drape and divert, respectively, around an embedded obstacle. It is these modified plasmas at the magnetopause, astropause, or IMB that interact directly with the planetary or stellar obstacle. Magnetic reconnection is a key process to consider at all these interfaces as it results in the transport of significant amounts of mass, energy, and magnetic flux. Because the physics of magnetic reconnection depends on local plasma properties, it is critical to understand how near-magnetopause/astropause plasmas may be modified from their upstream values (Borovsky et al. 2008; Borovsky 2021).
2.1 The Role of the Magnetosheath
For systems embedded in super-magnetosonic flow, within a planetary magnetosheath, magnetic fields drape over a magnetopause boundary, and the shocked plasmas are heated and compressed compared to their upstream values. Given the complexity of this regime, modeling of the magnetosheath becomes critical to be able to connect upstream flow properties with the likelihood for magnetic reconnection to occur at the magnetopause. For complex geometries and more self-consistent physics, magnetohydrodynamic (MHD) simulations of the flow-embedded obstacle may be required. Here we provide an overview of some common tools used for non-computationally intensive analytical modeling of magnetosheath properties used to predict near-magnetopause plasma parameters relevant for reconnection. These models are most effective when considering a quasi-perpendicular bow shock geometry, as additional acceleration mechanisms and magnetosheath jets may be formed in quasi-parallel geometries that can significantly modify magnetosheath properties (Fuselier et al. 1994; Dimmock et al. 2015; Archer and Horbury 2013; Hietala and Plaschke 2013; Plaschke et al. 2013; Karlsson et al. 2021) and are not as readily modeled.
Using analytical magnetosheath models at Earth, the maximum magnetic shear model was developed to identify the most likely location of the reconnection X-line along the magnetopause (Trattner et al. 2007). This model and its application to MMS data are discussed in detail by (Trattner et al. 2012, 2021 and Fuselier et al., this collection). As shown in Fig. 2, maximum shear models have also recently been applied to Saturn (Fuselier et al. 2014, 2020b) and Mars (Bowers et al. 2023). The successful comparisons of the maximum magnetic shear model to spacecraft observations indicate that there is typically a single dominant X-line, or at least active localized reconnection extended generally along the expected dominant X-line at a magnetopause for an intrinsic magnetosphere. This paradigm will be shown in Sect. 5 to be critical for scaling the energy available from magnetopause reconnection to other planetary bodies.

2.1.1 Early Magnetosheath Models and Plasma Depletion Layers
For planetary magnetospheres embedded in the super-magnetosonic solar wind, Spreiter et al. (1966) developed the first early models of magnetosheath flow using gas dynamics and the frozen-in flow condition. Across the bow shock, the Rankine-Hugoniot shock jump conditions were used to determine the downstream conditions at the shock. Then, using hydrodynamic flow and a fixed, impenetrable magnetopause boundary at a given standoff distance from the obstacle, the density, velocity, and temperature of magnetosheath plasmas were determined. This model was used not only at Earth under varying conditions, but to consider flow around various planetary magnetospheres (Spreiter and Alksne 1970). Upstream parameters, magnetopause standoff distance (i.e., effective obstacle size), and shock jump strength/heating were the tunable parameters.
Including electromagnetic forces in models of the magnetosheath is essential to model the near magnetopause plasmas. Zwan and Wolf (1976) and then later Southwood and Kivelson (1995) included such effects in their modeling of magnetic field evolution in the magnetosheath, using the Spreiter et al. (1966) models as an initial condition for the magnetosheath plasmas. Here, as shown in Fig. 3, a plasma depletion layer (PDL) was identified, where magnetic field piles-up against the boundary, squeezing plasma around the nose, resulting in a reduction of density from the magnetosheath to the magnetopause, with a more precipitous drop along the subsolar magnetopause. Although its effects are large-scale, plasma depletion itself is a kinetic process, with depletion first taking place through the loss of parallel particles along the field, followed by instability growth and scattering (Anderson and Fuselier 1993).

(After Zwan and Wolf (1976).) Illustration of magnetic flux-pile-up against a magnetized planetary obstacle embedded in super-magnetosonic flow for three successive time intervals with \(\mathrm{t}_{1} < \mathrm{t}_{2} < \mathrm{t}_{3}\). For a given magnetic flux tube in the upstream flow, indicated with red lines, the magnetic field strength increases and flux tube area decreases in the subsolar region as it drapes against the magnetopause. Plasma within these draped regions is squeezed out along the flux tube around the obstacle between the bow-shock (BS) and magnetopause (MP), resulting in decreased plasma density (i.e., a plasma depletion layer (PDL)) and further increased magnetic field strength, both contributing to a smaller near-magnetopause plasma \(\beta \)
PDLs have been observed at almost every magnetized obstacle in the solar system and represent a reduction in both near-magnetopause plasma \(\beta \) (the ratio of thermal pressure to magnetic pressure) and a reduction in density that impacts reconnection parameters such as the Alfvén speed, the stability of the high-latitude reconnection at Earth in cases of northward interplanetary magnetic field (IMF) (e.g., Fuselier et al. 2000) and, as will be discussed, the conditions for diamagnetic suppression of reconnection onset at the dayside magnetopause.
As shown in Fig. 4, the plasma depletion process is readily scalable to different objects via a characteristic distance that is required to achieve a certain reduction in plasma \(\beta \). This depletion length scale is approximately 5-10% of the obstacle size (Gershman et al. 2013; Cairns and Fuselier 2017). Here we add recent observations of plasma depletion layers at the heliopause (Cairns and Fuselier 2017) and at Neptune (Jasinski et al. 2022) to the initial analysis by Gershman et al. (2013). Plasma \(\beta \) at a planetary magnetopause can reduce by up to an order of magnitude from its downstream value at the subsolar region, with more modest modifications elsewhere around the obstacle. Plasma depletion is most pronounced in planetary obstacles that are embedded in low upstream \(\mathrm{M}_{\mathrm{A}}\) plasma (Gershman et al. 2013), where there is a tremendous amount of incident magnetic flux available to drape over the obstacle, and the scale of the magnetosheath is relatively larger compared to the size of the obstacle (\({\sim} 1/\mathrm{M}_{\mathrm{A}}^{2}\)), allowing for longer depletion times (Zwan and Wolf 1976). Through their modification of the near-magnetopause \(\beta \), PDLs have been shown to impact magnetic reconnection rates (Anderson et al. 1997; Dorelli et al. 2004).

Plasma depletion scaling throughout the solar system, adapted from Gershman et al. (2013), with updated data points for the heliopause (Cairns and Fuselier 2017) using data from the study and Neptune (Jasinski et al. 2022), assuming ∼30 min PDL transit length corresponding to ∼2.2 RN size and a \(\beta _{\mathrm{MP}}/\beta _{\mathrm{BS}} \sim 0.3\). A best fit line of slope 0.073 ± 0.043 is shown, where the mean and standard deviation were calculated from the ratio of depletion scale length to obstacle size. Factors of 2 error bars were added for each point when variations were not provided in the corresponding table by Gershman et al. (2013)
2.1.2 Scaling Magnetosheath and Magnetic Field Models
To model the evolution of magnetosheath plasma around any obstacle, Kobel and Flückiger (1994) developed an analytical model that uses potential fields and paraboloids of revolution for the shape of the bow shock and magnetopause to solve for the magnetic field everywhere in the magnetosheath using only standoff distances and IMF direction as inputs. In addition, Petrinec and Russell (1997) provide flow vectors, mass density, and plasma pressure at any point on the magnetopause surface in the hydrodynamic case. These models can be combined to develop models for plasma and magnetic flux transport along the magnetopause (Petrinec et al. 2003; Cooling et al. 2001). Such expressions do not include the additional reduction in density and increase in magnetic field associated with PDLs, though such effects can be incorporated in studies of near-magnetopause plasma properties (Masters 2014, 2015a; Petrinec et al. 2003). The hydrodynamic assumptions in the Petrinec and Russell (1997) model also results in unphysical super-Alfvénic flows along the flanks of the magnetopause (Petrinec et al. 2003). These, and other magnetosheath models (such as those extracted from MHD simulations) have been used extensively to predict regions of high flow and magnetic shear across magnetopause boundaries throughout the solar system (Fuselier et al. 2014, 2020b; Masters 2014, 2015a; Desroche et al. 2013), providing estimates of under what conditions reconnection may be possible.
The Kobel-Fluckiger (K-F) equations have been converted into GSE-like coordinates \((x, y, z)\) at Earth by Petrinec et al. (2003),
with \(x' = -x + \mathrm{R}_{\mathrm{MP}}/2\), \(y' = -y\), and \(z' = -z'\) with \(r' = \sqrt{}(x^{\prime 2}+y^{\prime 2}+z^{\prime 2})\). \(\mathrm{v}_{\mathrm{bs}} = \sqrt{}(2\mathrm{R}_{\mathrm{BS}}-\mathrm{R}_{\mathrm{MP}})\), \(\mathrm{v}_{\mathrm{MP}} = \sqrt{}\mathrm{R}_{\mathrm{MP}}\) and ‘dis’ referring to a magnetic disturbance field following nomenclature by Petrinec et al. (2003). These equations are valid between the magnetopause and magnetosheath. Petrinec et al. (2003) also provide analytical equations for the flow speed at the magnetopause, modified for the presence of a \(\mathbf{JxB}\) force.
A simple representation of many planetary dynamos is the offset-tilted-dipole (OTD) model, where the planetary field is modeled as a single magnetic dipole with an origin that can be offset from the center of the planetary body with a tilt angle with respect to the rotation axis (Ness et al. 1976). While these models result in significant errors in estimating the field close to the planet (Stanley and Bloxham 2006; Bagenal 2013; Soderlund and Stanley 2020), they can be quite effective for modeling the near-magnetopause fields.
The equations for a dipole field in a cartesian coordinate system \((x_{\mathrm{d}},y_{\mathrm{d}},z_{\mathrm{d}})\) where the \(\mathrm{Z}_{\mathrm{d}}\) axis is aligned with the dipole moment \(\mathbf{M}\) are,
Here, to obtain the magnetic field vector in GSE-like coordinates \((x,y,z)\), a vector \((x,y,z)\) is transformed into the frame of an offset dipole with origin \((x,y,z) = (x_{\mathrm{do}},y_{\mathrm{do}},z_{\mathrm{do}})\). The resultant dipole magnetic field vector is then transformed into the original coordinate system.
Solving for the external magnetic field source required to obtain a given magnetopause is non-trivial and can be computationally intense. However, Masters (2014, 2015a) provide a scheme to estimate the magnetic field vector at the magnetopause using only a model for the internal field and the magnetopause shape. They first take the planetary field vector at the magnetopause \(\mathbf{B}_{\mathbf{{mp}}}\) boundary and then zero out the component normal to the boundary, i.e., \(\mathbf{B}_{\mathbf{{mp}}} = \mathbf{B}_{\mathbf{{mp}}} - \mathbf{B}_{\mathbf{{mp}}} \boldsymbol{\cdot}\mathbf{n}\), where for the K-F magnetopause, the outward normal vector in GSE coordinates is defined as:
This approach provides a computationally simple and straightforward way to estimate magnetic shear across the magnetopause. The magnetic field magnitude directly inside the magnetopause can also be adjusted to ensure there is pressure balance across the magnetopause (Masters 2014, 2015a). The magnetic pressure inside the magnetopause can be estimated from the upstream dynamic pressure following Spreiter and Alksne (1970),
where \(\kappa \approx 0.881\) and \(\psi \) is the angle between the magnetopause normal vector and the solar wind flow.
The magnetopause standoff distance can also be estimated from the upstream pressure and surface magnetic field as (Bagenal 2013),
where \(\xi =1.4\) and \(\mathrm{B}_{\mathrm{o}}\) corresponding to the surface magnetic field strength of a planetary dipole. The specific \(\kappa \), \(\xi \), and 1/6 dependence assume low \(\beta \) magnetospheric environments, such that giant planets with significant magnetodisc structures exhibit different scalings and the stand-off distance using equation (2.8) is underestimated (Jackman et al. 2019; Arridge et al. 2006).
There is also subtlety in determination of the bow shock standoff distance with respect to the magnetopause, including the magnetopause shape, angle between upstream magnetic field and upstream flow, and Mach numbers (Cairns and Lyon 1996). However, a simple, yet effective model is provided by Farris et al. (1991); Formisano et al. (1971), and Song (2001) that uses the fast magnetosonic Mach number,
For \(\gamma = 5/3\) and the values of \(\mathrm{M}_{\mathrm{ms}}\) in Table 1, reasonable estimates of bow shock standoff distances are produced (e.g., a thicker magnetosheath at Mercury where \(\mathrm{M}_{\mathrm{ms}}\) ∼ 3.8 compared to the outer planets with \(\mathrm{M}_{\mathrm{ms}}\sim 11\)).
Equations (2.1)-(2.9) provide a generalized framework for modeling draping and estimating magnetic shear for a magnetized object embedded in supermagnetosonic flow. Examples of draping and magnetic shear plots calculated with this approach are shown in Fig. 5 for several planetary bodies. These plots are then combined with tools like the maximum magnetic shear model (Trattner et al. 2007, 2021) to estimate reconnection X-line formation and propagation along a magnetopause. At Earth, the large amount of data available has enabled more accurate empirical models of IMF draping (Michotte de Welle et al. 2022). Because the Earth’s magnetosheath geometry is similar to other planetary magnetospheres, such a model may be adaptable to other systems.

Example calculation of magnetic field draping over the XY plane and magnetic shear across a planetary magnetopause projected on the YZ plane for (a) Mercury (\(-0.2~\mathrm{R}_{\mathrm{M}}\) z-offset in dipole, no tilt), (b) Uranus (effective 39.2o tilt in XZ plane following Masters (2014), comparable with their Fig. 4(e), and (c) exoplanet HAT-P-11bf (no offset or tilt). Upstream conditions are taken from Table 1 and used to derive magnetopause and bow shock standoff distances. The IMF was taken in the X-Y plane with Bx/By = 2 for Mercury, Bx = 0 for Uranus, and By = 0 for HAT-P-11bf (Ben-Jaffel et al. 2022). The black circle of radius \(\mathrm{R}_{\mathrm{MP}}\sqrt{}2\) corresponds to the x = 0 plane crossing of the magnetopause surface
Magnetospheres and astrospheres embedded in sub-Alfvénic flow appear as near cylindrical obstacles (Czechowski and Grygorczuk 2017; Neubauer 1999; Kaweeyanun et al. 2020). Some analytical works have been developed to study Alfvén-wing properties (Neubauer 1980; Simon 2015), though the equivalent of K-F—like and Petrinec-like magnetosheath models for the near-magnetopause plasmas in these systems has not been reported to our knowledge. Kaweeyanun et al. (2020) provide some empirical parameterization of upstream conditions of Ganymede as a cylindrical obstacle with compressions varying as the cosine of the angle between the nose of the obstacle and magnetopause normal.. This approach could be readily applied to other magnetized obstacles embedded in sub-Alfvénic flow.
Finally, at induced magnetospheres, the upstream fields drape around the magnetic pile-up boundary, but also wrap around the obstacle, resulting in a magnetotail-like configuration, but instead of being connected to a polar cap of a planetary field, they are connected to the upstream field. For these obstacles embedded in super magnetosonic flows like the solar wind, the K-F flow vectors may be appropriate using reasonable boundaries for the bow shock and magnetic pile-up boundary. On the dayside, a K-F model may also be relevant to describe the draping over the MPB, though to our knowledge has not yet been applied to Mars or Venus. On the flanks, models of potential flow around a conducting sphere may be more appropriate (Romanelli et al. 2014; Luhmann et al. 2004).
3 Reconnection at Magnetized Obstacles and the Local Plasma Environment
Here we discuss reconnection in the context of theoretical framework often applied to data from Cluster, THEMIS, and MMS and those often employed by those studying planetary magnetospheres and astrospheres.
3.1 L-M-N Coordinates and Minimum Variance Analysis
Defining the relevant coordinate system in which to study reconnection is critical for being able to estimate reconnection rates, to study the transport of reconnected structures such as flux ropes, and to be able to compare observations with numerical models. The reconnection community at large has adopted a boundary-normal ‘L-M-N’ coordinate system first introduced by Russell and Elphic (1979) to study flux transfer events propagating along Earth’s dayside magnetopause. The N-direction was defined as the boundary normal to the magnetopause, the L-direction was along the projection of the solar-magnetospheric Z-direction perpendicular to the magnetopause normal, and the M-direction completed the right-hand coordinate system.
Over time, this concept of global LMN coordinate system was merged with concept of a locally defined coordinate system from minimum variance analysis of magnetic field data across a boundary (Sonnerup and Cahill 1967). Here, the minimum variance direction, i.e., that with the smallest eigenvalue, corresponds to the boundary normal N direction. Across a one-dimensional structure, the condition that the divergence of \(\mathbf{B}\) must be equal to zero requires that the component of the field normal to the layer must be constant (Sonnerup and Scheible 1998). Therefore, minimum variance analysis naturally derives the direction normal to the magnetopause current sheet The L and M axes therefore lie in the plane of the magnetopause current sheet. Nominally, the L component corresponds to the maximum variance direction since that is the direction of rotation of the magnetic field. Numerical simulations of reconnection have nearly universally adopted local L-M-N coordinate systems with the L-axis being that of the reconnecting component of the field, N being the direction normal to the initial current sheet, and M being the ‘out-of-plane’ guide-field direction.
The use of minimum variance techniques by Sonnerup and Cahill (1967) provided a mechanism to distinguish between rotational and tangential discontinuities. A tangential discontinuity would correspond to a \(\mathrm{B}_{\mathrm{N}}/\mathrm{B} \sim 0\), i.e., a non-reconnecting current sheet. A rotational discontinuity would correspond to a reconnecting current sheet, with the \(\mathrm{B}_{\mathrm{N}}/\mathrm{B}\) giving an estimation of the dimensionless reconnection rate (e.g., \(\mathrm{V}_{\mathrm{in}}/\mathrm{V}_{\mathrm{A}}\), where \(\mathrm{V}_{\mathrm{in}}\) is the in-flow speed and VA is the Alfven speed) (Mozer and Retinò 2007). Minimum variance analysis of magnetopause current sheets has been widely applied to planetary magnetospheres (DiBraccio et al. 2013; Slavin et al. 2014) due to their reliance only on fluxgate magnetometer data, which are nearly ubiquitously deployed on planetary missions.
A significant caveat with these single-spacecraft MVA techniques is that they are highly trajectory dependent or dependent on the duration of the time interval used to derive the coordinate systems. Care must be taken when trying to connect minimum variance-derived coordinate systems and true L-M-N coordinates for a broad set of observations. Often, the ratio of eigenvalues of the minimum variance direction to that of the intermediate variance direction is used to provide a proxy for the quality of the coordinate system definition. Typically, a factor of ∼10 is considered as a rough rule of thumb for a quality normal-vector direction determination, though even large ratios may not guarantee accurate results (Sonnerup and Scheible 1998). As an example, 2D PIC simulations of non-reconnecting and reconnecting current sheets (see simulation setup in Chen et al. 2016 of the Burch et al. 2016 reconnection event) are shown in Fig. 6. For spacecraft trajectories along the N direction in the vicinity of the current sheet, we perform minimum variance analysis on the magnetic field vectors and compare the derived minimum variance (\(\mathrm{B}_{\mathrm{N}}\)) direction with the N-axis (i.e., the nominal normal direction), and the eigenvalues for the minimum to intermediate variance direction. The \(\mathrm{B}_{\mathrm{N}}/\mathrm{B}\) values are very small for the non-reconnecting case (Fig. 6a), as expected, and are significant (i.e., ∼0.6) for the reconnecting case (Fig. 6b). The determination of the N-direction is accurate to within \({<}5^{\mathrm{o}}\) for the non-reconnecting case, and accurate only to within \({<}20^{\mathrm{o}}\) for the reconnecting case, despite large (∼10-50) ratios of the eigenvalues. The presence of significant \(\mathrm{B}_{\mathrm{M}}\) and \(\mathrm{B}_{\mathrm{N}}\) variations in the magnetic field in the vicinity of reconnection diffusion regions significantly complicates this type of analysis.

Two time periods from an example 2-D PIC simulation of a reconnecting current sheet that show (a) before the onset of fast reconnection and (b) after a fast reconnection X-line has formed. For each, an MVA analysis was performed on data \({\pm}50\mathrm{d}_{\mathrm{e}}\) from the current sheet at each L. The ratio of intermediate to minimum eigenvalues (\(\mathrm{e}_{2}/\mathrm{e}_{1}\)) is shown, with red data points corresponding to \(\mathrm{e}_{2}/\mathrm{e}_{1} > 10\). The angle between the minimum variance direction and N-axis shows how accurately MVA determined the current normal coordinate system. The ratio of the minimum variance component to the total field providing a proxy for the reconnection rate. For the non-reconnecting current sheet, MVA analysis provides a well-resolved coordinate system (\(2^{\mathrm{o}}\pm 2^{\mathrm{o}}\)) with statistically zero reconnection rate 0.007 ± 0.005. For the reconnecting current sheet, MVA-based determination of the coordinate system becomes more challenging, but for well-separated eigenvalues can provide a coordinate system within 17 ± 4o and provide a finite reconnection rate of 0.6 ± 0.2
Data from MMS have provided a unique opportunity to assess the accuracy of MVA techniques based on magnetometer data alone with other methods of coordinate system and boundary normal determination. Denton et al. (2018) compared LMN directions derived from both single- and multi-spacecraft techniques, and found that minimum variance analysis of reconnecting current sheets is most reliable in terms of deriving the L-direction, i.e. the maximum variance direction. The differentiation between the M- and N- directions were less clear. Genestreti et al. (2018) also found that different techniques resulted in up to \({\sim} 35^{\mathrm{o}}\) variation in the directions of the L-M-N coordinate systems. Overall, a combination of techniques was found to be most effective, though this approach is not necessarily possible at most planetary environments. If minimum variance is the only option, its coordinate system should be critically examined and compared to model expectations and other observations that may be available (Denton et al. 2018).
3.2 Guide Field, Symmetry, Shear Angle
As discussed, reconnection studies tend to organize observations using a local L-M-N coordinate system. In such a framework, the L-component of the magnetic field represents the reconnecting component and the M-component represents the so-called ‘guide-field.’ The relative strengths of the L-component on either side of a reconnecting current sheet defines the symmetry of the system. This framework, used for studying spacecraft observations and in numerical simulations of reconnection, is discussed in detail in Genestreti et al., this collection.
Across a given interface we define \(\mathbf{B}_{2}\) as the vector on the side with the larger field strength (e.g., magnetosphere) and \(\mathbf{B}_{1}\) as the vector on the side with the smaller field strength (e.g., the magnetosheath). A symmetric system corresponds to \(\mathrm{B}_{1} \sim \mathrm{B}_{2}\), while \(\mathrm{B}_{2} \gg \mathrm{B}_{1}\) corresponds to a highly asymmetric system. In addition, changes in density and temperature across the magnetopause also result in an asymmetric system. In the asymmetric case, it is not immediately obvious how magnetosheath and magnetospheric plasma properties should be used to define the reconnection outflow Alfvén speed. However, Cassak and Shay (2007), Cassak et al. (2017a,b), Liu et al., this journal, provide a set of such scalings that apply to both symmetric and asymmetric systems, namely,
and
Here, \(\rho _{1}\) and \(\rho _{2}\) refer to the mass density on either side of the interface (1 = magnetosheath, 2 = magnetosphere). These relationships have been applied to component reconnection processes by applying them only to the L-component of magnetic field.
Often in the study of planetary magnetospheres, the magnetic shear angle (\(\theta \)) and change in plasma \(\beta \) across a current sheet is used to describe an interface rather than terms such as ‘guide-field’ and ‘symmetry.’ These seemingly disparate approaches can be linked together through a model of component reconnection, such as that of Swisdak and Drake (2007) and Hesse et al. (2013), where the X-line approximately bisects the angle between the magnetic fields on either side of the boundary. An alternative formulation was presented by Sonnerup (1974), where an X-line would orient itself in a way where a constant guide-field would form across the reconnection region. Simulations have indicated that the bisection model may be more appropriate (Liu et al. 2015, 2018), though Wang et al. (2015) demonstrated that these different approaches often yield coordinate systems within a few degrees of one another. A key difference in these models is that in the Sonnerup (1974) formulation, it is possible to define a set of vectors across a boundary for which no constant guide field can be determined and reconnection cannot occur. In this scenario, the components of the two magnetic field vectors perpendicular to the predicated X-line direction are parallel rather than anti-parallel. The Sonnerup (1974) therefore predicts a form of ‘geometric suppression’ (very high-guide-field and low shear angle) that is not present in the bisection model. By allowing the guide-field strength to vary across the interface, geometric suppression of reconnection does not occur (Swisdak and Drake 2007).
Here, as illustrated in Fig. 7, we first define the N-direction as normal to a plane containing \(\mathbf{B}_{1}\) and \(\mathbf{B}_{2}\). Following the Swisdak and Drake (2007) model, An X-line along the M-direction is defined that forms an angle \({\approx} \theta /2\) from \(\mathbf{B}_{1}\). In this formulation, the guide field (M-direction) can be different on either side of the interface (Fig. 7b), namely,
and
with reconnecting (L-direction) components,
and
The ratio of the reconnecting components is therefore equal to the ratio of magnitudes, i.e.,
With equations (3.4)-(3.8), the guide fields can be normalized by the reconnecting component, resulting in,
In this normalization, the guide field can be much larger than 1. In addition, both \(B_{\mathrm{asym},L}/B_{\mathrm{asym}}\) and \(v_{\mathrm{asym},L}/v_{\mathrm{asym}}\) vary as \(\sin(\theta /2)\).

(After Sonnerup 1974.) Illustration of L-M-N coordinate system defined by two vectors on either side of a plasma interface. Here vectors are shown in the L-M plane. The N direction is normal to the plane of the figure. Examples of symmetric and asymmetric reconnection with a guide field are shown in (a) and (b), respectively. Using the bisection model, \(\nu \approx \theta /2\) (Swisdak and Drake 2007; Hesse et al. 2013)
As will be discussed, the change in plasma \(\beta \) across an interface (\(\Delta \beta \equiv \beta _{1} -\beta _{2} \)) is an important parameter for examining the possibility of reconnection to occur. Across a stagnant asymmetric interface, thermal pressure and magnetic pressure are expected to approximately balance each other (i.e., neglecting dynamic pressure for flow lines that move around the magnetopause, and neglecting magnetic tension forces associated with the curvature of the field). Since the plasma flows are largely tangential to the magnetopause boundary, their dynamic pressure does not significantly contribute to the normal pressure.
Dividing both sides of equation (3.10) \(\frac{B_{2}^{2}}{2 \mu _{o}}\) and rearranging provides a relationship between the plasma betas on either side of the interface and ratios of the magnetic fields,
which can be rearranged in terms of \(\Delta \beta \) as,
For a low-\(\beta \) magnetosphere, i.e., \(\beta _{2} \ll 1\), equation (3.12) can be approximated as,
providing a relationship between the change in plasma \(\beta \) and ratio of magnetic field strengths across an interface. Equations (3.13), (3.4), and (3.9) can therefore be used to ‘translate’ between \((\Delta \beta, \boldsymbol{\theta} )\) to a guide field strength and system symmetry.
Furthermore, if \(\beta _{1} \gg \beta _{2}\), then \(\Delta \beta \approx \beta _{1}\) and equation (3.13) can be written as,
If both magnetosheath and magnetospheric plasmas are low \(\beta \), then equations (3.9)-(3.11) reduces to the symmetric case of \(\mathrm{B}_{1}/\mathrm{B}_{2} \approx 1\), with \(\Delta \beta =0\). Even if the magnetic fields are symmetric, the mass densities may nonetheless be asymmetric across the interface if the temperatures correspondingly vary to allow for pressure balance (Cassak and Shay 2007). Here, the densities and temperatures are either side of the interface will both impact the calculation of plasma \(\beta \), and the densities impact the asymmetric mass density in equation (3.2).
Finally, for the typical case at a magnetopause interface of \(\beta _{2} \ll 1\) and \(\rho _{1} > \rho _{2}\), we can approximate the asymmetric mass density from equation (3.2) only as a function of the magnetosheath mass density and the ratio of magnetic field strengths across the boundary, i.e.,
3.3 Suppressed Reconnection Onset
There are different conditions at the interface of plasmas that can inhibit the ability of reconnection to occur. This type of binary analysis has been useful to study planetary systems and parametrize the role of reconnection. Here we discuss diamagnetic suppression, flow-shear-based suppression, and spatial suppression.
The diamagnetic suppression of component reconnection at interfaces with large density asymmetries was studied in detail by Swisdak et al. 2003, 2010 and summarized in Liu et al., this journal. Here, through particle-in-cell simulations, it was found that if the drift speed of the X-line from was larger than that of the reconnection outflow speed, reconnection is suppressed. This condition led to the criterion of
where \(\Delta \) corresponds to the thickness of the current sheet, often taken to be within the range \(\Delta= 0.5\mathrm{d}_{\mathrm{i}}\) to \(2\mathrm{d}_{\mathrm{i}}\), and \(\mathrm{d}_{\mathrm{i}}\) is the ion inertial length. The ion inertial length is the scale at which ions decouple from electrons and reconnection can take place, i.e.,
For a given plasma composition, the ion inertial length scales only with the number density, a fact that will impact scaling reconnection across different systems.
Kobayashi et al. (2014) and Liu and Hesse (2016) studied the diamagnetic suppression of asymmetric reconnection for the case of both strong density and temperature gradients that lead to a change in plasma \(\beta \) across an interface. They found that diamagnetic drift generated by a strong density asymmetry led to suppression as expected. The drift of the X-line is slowed and overtaken by the faster moving ion flow. However, strong diamagnetic drifts associated with only a gradient in temperature were not as effective in suppressing reconnection. Kobayashi et al. (2014), in particular, found that temperature-based gradients led to the generation of other instabilities that destabilized the boundary to reconnection. Nevertheless, as shown in Fig. 8, equation (3.16) has been highly successful at parameterizing reconnection at Earth (Phan et al. 2013a), planetary magnetospheres (DiBraccio et al. 2013; Masters et al. 2012; Montgomery et al. 2022; Fuselier et al. 2014; Jasinski et al. 2021; Sun et al. 2020a), and at the heliopause (Fuselier and Cairns 2017; Fuselier et al. 2020a), enabling delineation between groups of non-reconnecting and reconnecting current sheets.

Reported reconnecting (blue data points) and non-reconnecting (red data points) current sheets at (a) Earth (Phan et al. 2013a,b (●)) and (b) planetary magnetopauses (Mercury from DiBraccio et al. 2013 (\(\blacklozenge \)), Saturn from Jasinski et al. 2016 and Fuselier et al. 2014 (\(\blacksquare \)) and Jupiter from Montgomery et al. 2022 (▲)) and at the heliopause (Fuselier et al. 2020a (\(\boldsymbol{+}\))). The Swisdak et al. (2020) criterion provides a clear grouping between the two sets of events. Data was digitized from the referenced publications. For the DiBraccio et al. (2013) data points, only the high \(|\mathrm{B}_{\mathrm{N}}/\mathrm{B}_{\mathrm{MP}}| > 0.25\) data points were taken. For Montgomery et al. (2022) the reconnection events were taken with 2 or 3 reconnection signatures, and the non-reconnecting events were taken as those with 0 reconnection signatures. Uncertainties on shear angles range from 5-20o and \(\beta \) up to a factor of 2, though were not necessarily reported for all studies
Figure 9 provides a summary of the relationship between \(\Delta \beta \), \(\theta \), and \(\mathrm{B}_{\mathrm{M}}/\mathrm{B}_{\mathrm{Lasym}}\). We add curves corresponding to the criteria for diamagnetic suppression. Strong-guide-field reconnection occurs for low shear angles. The Swisdak et al. (2003, 2010) criterion is most effective when applied locally to a specific plasma interface. Average scalings of Gershman and DiBraccio 2020; Masters 2018 throughout the solar system and models of reconnection at Jupiter (Desroche et al. 2012) predict largely suppressed reconnection at the subsolar and dawnside magnetopauses, respectively, yet observations of reconnection signatures (Ebert et al. 2017; Montgomery et al. 2022; Jasinski et al. 2021) are nonetheless reported. The near ubiquitous presence of boundary layers along planetary magnetopauses (Sonnerup and Lotko 1990; Anderson et al. 2011; Masters et al. 2011; Gershman et al. 2016) tend to systematically reduce the change in plasma beta across interfaces and enable reconnection where it may have otherwise been predicted to be suppressed. In addition, as discussed in Gershman and DiBraccio (2020), increased solar activity also systematically lowers the upstream Alfvénic Mach number, which tends to decrease the plasma \(\beta \) at planetary magnetopause boundaries. Weaker shock compression factors and increased plasma depletion also contribute to a reduced \(\Delta \beta \). When diamagnetic suppression criteria are fulfilled and signatures of reconnection are observed in the particle data, it may indicate that reconnection occurred elsewhere along the boundary (Montgomery et al. 2022; Fuselier et al. 2020b).

Normalized guide field \((|\mathrm{B}_{\mathrm{M}}/\mathrm{B}_{\mathrm{L}}|)\) as a function of magnetic shear angle and change in plasma \(\beta \) across an interface, assuming \(\Delta \beta \approx \left ( \frac{B_{2}}{B_{1}} \right )^{2} -1\) and following the bisection model for the X-line orientation. Smaller magnetic shear angles correspond to larger relative guide fields. The solid black, dashed black, and dash-dotted black lines correspond to the criterion of diamagnetic suppression from Swisdak et al. (2010) for L = 1di, L = 2di, and L = 0.5di, respectively. Below these lines, diamagnetic drift of the X-line at the interface of two plasmas exceeds that of the reconnection outflow speed and reconnection is suppressed
Various reconnection suppression mechanisms are illustrated in Fig. 10. In addition to diamagnetic suppression, flow-based suppression by Cassak and Otto (2011) and Doss et al. (2015) was predicted to occur when the differential shear speed across the interface exceeded the asymmetric Alfvén speed by a factor,
Flow-shear-based suppression was investigated at the magnetopauses of Jupiter and Saturn (Sawyer et al. 2019; Desroche et al. 2012, 2013), where strong internal corotation-based flows may create increased shears at the magnetopause, in particular along the dawn flank. However, such super-Alfvénic shear flows have not been reported at either planet. Quite the contrary, reconnection was observed at Saturn in a region where flow-shear-based suppression was thought to be present (Sawyer et al. 2019). Flow-shear-based suppression at Jupiter and Saturn is based on extension of corotation flows out to the magnetopause, and observations of these flows have been difficult. Furthermore, as discussed in Sect. 2.1.2, hydrodynamic models of magnetosheath (e.g., Petrinec and Russell 1997) tend to overestimate the flow speed that may lead to overestimates of flow-shear-based suppression.

Suppression mechanisms of reconnection illustrated with out-of-plane current density and magnetic field lines in the L-N plane. Dimensions and current densities are for reference only and not necessarily quantitatively comparable across the panels. Typical fast reconnection is shown in (a), adapted from Swisdak et al. (2010). Diamagnetic suppression is shown in (b), also adapted from Swisdak et al. (2010), where sufficiently large density gradients are introduced across the interface to generate a diamagnetic drift faster than the in-plane Alfvén speed such that the reconnection rate significantly reduces. Shear-based suppression is shown in (c), adapted from Doss et al. (2015), where relative shear flows across the interface significantly exceed the in-plane Alfvén speed and the interface becomes Kelvin-Helmholtz unstable. Spatial suppression, as recently studied by Liu et al. (2019), is shown in (d), where thin current sheets are not able to form. Figure (d) current densities and fields were derived using initial condition from Wilson et al. (2016)
Finally, Liu et al. (2019) study the concept of ‘spatial suppression’ of magnetic reconnection. Such suppression was observed in 3-D particle-in-cell simulations of X-lines spatially confined in the M-direction. When the X-line was on the order of \({<}10\mathrm{d}_{\mathrm{i}}\), the reconnection rate and outflow speed drop significantly, due to the Hall effect in 3D. Per the author of that study, this minimum X-line extent may explain the smallest azimuthal scales of dipolarization flux bundles at Earth, and the cause of a dawn-dusk asymmetry of reconnection in Mercury’s magnetotail As will be discussed in Sect. 5, spatial suppression of reconnection may also serve to reduce the overall efficiency of magnetopause reconnection at smaller planetary magnetospheres.
3.4 Scaling the Reconnection Rate and Energy Partitioning
The dimensionless reconnection rate is commonly studied and evaluated in reconnection simulations andstudies of planetary magnetospheres. The dimensionless reconnection rate (\(\alpha \)), namely the ratio of inflow velocity to outflow velocity (\(\mathrm{V}_{\mathrm{in}}/\mathrm{V}_{\mathrm{A}}\)) has been found at Earth to be in the range 0.05-0.2 (Lindqvist and Mozer 1990; Shay et al. 1999; Phan et al. 2007; Mozer and Retinò 2007; Cassak et al. 2017b; Hesse et al. 2018; Genestreti et al. 2018; Burch et al. 2020; Sun et al. 2020b; Burch et al. 2022; Li and Liu 2021). Similar ranges of numbers have been derived at planetary magnetospheres (DiBraccio et al. 2013; Gershman et al. 2016). The use of rates on the order of \(\alpha \sim 0.1\) is therefore sufficient to parameterize reconnection dynamics.
The reconnection electric field maintains the current in the electron diffusion region and regulates the energy conversion from the inflow to the outflow (Hesse et al. 2018). This field is defined as the dimensionless reconnection rate times the local asymmetric Alfven speed and asymmetric magnetic field component (Cassak and Shay 2007; Liu et al. 2018),
For a given magnetized body, the relative strength of the reconnection electric field compared to other processes can be critical to evaluate to understand the potential role reconnection could have in driving dynamics. The outflow speed of reconnection can be compared against the corotating speed inside the magnetopause, giving a measure of what dominates a planetary magnetosphere (Kivelson 2007).
Of critical important at the diverse set of magnetized bodies in our solar system is how reconnection varies with the presence of multi-species plasmas or cold ion populations. Toledo-Redondo et al. (2017, 2018, 2021) and (Norgren et al., this collection) summarize MMS-era findings of both simulations and spacecraft data with regards to the role of cold protons and O+ in reconnection rate. In the presence of multi-species, multi-temperature plasma, a multi-scale ion diffusion region (IDR) forms that adds complexity to the reconnection site. This multi-scale IDR can result in different energization and scattering processes for different species, or different populations (Dargent et al. 2023). Despite this complexity at the micro-scales, at a macro-scale reconnection rate (i.e., the use of ∼0.1) appears largely unaffected by the presence of multi-species plasmas. However, in order to accurately calculate the local outflow speed, i.e., the Alfvén speed, one must utilize the correct mass density that accounts for the relevant plasma composition. Mass-loading effects, therefore, can become important for reducing the overall rate of transport of magnetic flux (i.e., \(\mathrm{V}_{A,\mathrm{asym},L}\mathrm{B}_{\mathrm{asym},L}\)) in a system (Norgren et al., this collection).
As discussed by Liu et al., this collection) and Phan et al. (2013b, 2014), approximately 50% of the available magnetic energy per particle, \(\mathrm{m}_{\mathrm{i}}\mathrm{V}_{\mathrm{AL}}^{2}\) (Shay et al. 2014), goes into the outflow jet, where \(\mathrm{V}_{\mathrm{AL}}\) is the inflow Alfven speed based on the reconnecting magnetic field component. Studies by Phan et al. (2013a,b, 2014) and Drake et al. (2009) have found 13% of the inflowing magnetic energy (or Poynting flux) per particle goes into increase of ion bulk temperature and 2% goes into electron bulk temperature increase. In terms of enthalpy flux, 33% of magnetic energy per particle is converted into ion enthalpy flux, while 4% goes into electron enthalpy flux. Toledo-Redondo et al. and Dargent et al. (2023) reported that up to 25% of the ion bulk heating can go into a cold ion population. These findings should be generally applicable to reconnecting systems throughout the universe and have already scaled to the solar wind (Phan et al. 2022), to the heliopause (Cairns and Fuselier 2018), to black holes (Chael et al. 2018), and to reconnection at sub-Alfven flows (Kaweeyanun et al. 2020) at Ganymede.
4 Reconnection Signatures in Planetary Magnetospheres
Magnetic reconnection has been observed at practically every explored magnetized body in the solar system. At planetary systems, where the plasma observations may be more limited, reconnection signatures are typically limited to the ‘magnetopause’ and ‘magnetotail’ regions. However, the high resolution and multipoint measurements provided by MMS has demonstrated that reconnection is ubiquitous in turbulent plasmas such as the magnetosheath (Yordanova et al. 2016; Vörös et al. 2017; Eriksson et al. 2018; Wilder et al. 2018; Phan et al. 2018; Stawarz et al. 2022) Kelvin-Helmholtz along the flanks of planetary magnetopauses is often framed as a competing process with dayside reconnection for the dominant source of solar wind mass and energy transport into a magnetosphere (e.g., Desroche et al. 2013; Masters 2018). However, reconnection has also been observed within Kelvin-Helmholtz vortices (Eriksson et al. 2016; Li et al. 2016; Vernisse et al. 2016) and may in fact lead to increased transport of mass and energy than may be predicted by MHD descriptions of the KHI instability (Nakamura et al. 2017, 2022).
Near-magnetopause plasma \(\beta \) throughout the solar system vary across a wide dynamic range of ∼0.05-100. Lower \(\beta \) values are typically observed in the inner heliosphere at Mercury, where the upstream \(\mathrm{M}_{\mathrm{A}}\) is low, though these nonetheless vary over several orders of magnitude (DiBraccio et al. 2013; Gershman et al. 2013; Slavin et al. 2014; Sun et al. 2022). In the outer solar system (Masters et al. 2012) and at the heliopause (Fuselier et al. 2020a), the near-magnetopause \(\beta \) tend to be larger, in the 1-100 range, which tends to limit the shear angles under which reconnection ispossible to nearly anti-parallel. Magnetic cloud Interplanetary Coronal Mass Ejections (ICMEs) tend to systematically reduce \(\mathrm{M}_{\mathrm{A}}\) throughout the heliosphere, leading to the potential for lower magnetopause plasma \(\beta \) during times of increased solar activity (Farrugia et al. 1997; Lavraud and Borovsky 2008; Gershman and DiBraccio 2020).
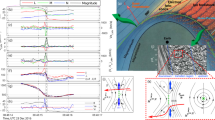
Signatures of active reconnection along a magnetopause-like boundary are (a) heated electrons (Montgomery et al. 2022; Fuselier et al. 2020b), (b) \(|\mathrm{B}_{\mathrm{n}}/\mathrm{B}_{\mathrm{mp}}| \gg 0.1\) (Sonnerup 1974; DiBraccio et al. 2013), (c) plasma jets and Hall-field signatures (Ebert et al. 2022; Harada et al. 2018; Cravens et al. 2020; Wang et al. 2021; Collinson et al. 2018), (d) flux ropes and traveling compression regions (Slavin et al. 1993, 2012; Jasinski et al. 2016, 2022; Imber et al. 2014; Russell 1995; Romanelli et al. 2022), and thick boundary layers (Masters et al. 2011; Fuselier et al. 2020b; Gershman et al. 2017). The majority of these signatures have been observed in \(\mathrm{M}_{\mathrm{MS}} > 1\) systems, but several been reported for the \(\mathrm{M}_{\mathrm{MS}} < 1\) Ganymede environment (Collinson et al. 2018; Ebert et al. 2022). As an example of similar signatures observed in different systems, reconnecting current sheets at Mars (Harada et al. 2018) and Jupiter (Ebert et al. 2017) are shown in Fig. 11 utilizing data from MAVEN and Juno, respectively. In both events, an ion jet was observed in the ‘L’ direction, indicative of a reconnection outflow. Despite significant differences in the Martian and Jovian systems, these events appear remarkably similar.

Reconnecting current sheets at (a) Jupiter (adapted from Ebert et al. 2017) and (b) Mars (adapted from Harada et al. 2018). Magnetic field data are shown in planetocentric coordinates, Mars-Solar-Orbit (MSO) and Jupiter-Solar-Orbit (JSO), respectively. In both of these examples, the (X, Y, Z) coordinates from planetocentric coordinates correspond to the (M, N, L) coordinates of the current sheet. An L-direction ion jet is shown for each in the vicinity of the current sheet crossing
Magnetic flux ropes formed along the dayside magnetopause, typically referred to as ‘flux-transfer-events’ (FTEs) have been observed at nearly every planetary magnetopause (Russell and Elphic 1979; Russell 1995). FTEs have been attributed with multiple possible formation mechanisms such as time varying reconnection (Southwood et al. 1988) and multiple X-line reconnection (Lee and Fu 1986; Raeder 2006). The core field strength and cadence of these structures varies depending on the system, as shown in Fig. 12 with a series of rapid, small-scale set of ‘FTE showers’ that can account for the majority of the transported flux at Mercury (Slavin et al. 2012; Imber et al. 2014; Sun et al. 2020a,b), to large-scale FTEs that are a signature of reconnection, but may not account for significant flux transport at the Giant Planets (Jasinski et al. 2016). When the magnetic shear at the magnetopause is low, MMS data has shown that the helicity sign of FTEs is correlated with the direction of the IMF, suggestive of guide-field-based-ordering of FTE structure. This correlation was not as strong in the presence of high magnetic shear (Dahani et al. 2022).

Example FTE observations at (a) Saturn (adapted from Jasinski et al. 2021) and (b) Mercury (adapted from Sun et al. 2020a). For FTEs, an enhanced magnetic field magnitude is observed within each structure along with a rotation in the field direction. At Saturn, the FTE is ∼1 min in duration. At Mercury, there are dozens of ∼1-10 s duration events each spaced by ∼1-10 s observed along the magnetopause, forming a so-called ‘FTE shower’
In the magnetotails of planets, reconnection is typically more symmetric, with \(\Delta \beta \approx \)0 across the tail current sheet. This plasma symmetry enables reconnection to occur for almost any shear angle if the current sheet is sufficiently thin. In planetary magnetotails, minimum variance analysis of magnetic field data is commonly used to identify the presence of reconnection such as dipolarization fronts (Vogt et al. 2020; Sundberg et al. 2012; Dewey et al. 2018; Jackman et al. 2015), flux ropes and plasmoids (Jackman et al. 2011; DiBraccio et al. 2015; Hara et al. 2022; DiBraccio and Gershman 2019; Zhang et al. 2012), and TCRs (Slavin et al. 2009, 2012; Vogt et al. 2014; Jackman et al. 2014). The loading and unloading of the magnetotail also varies from system-to-system, which leads to varying lobe pressures and corresponding reconnection outflow speeds. At Mercury, significantly sheared tail lobes from the interaction between the planet and the solar wind can lead to significant guide fields in the magnetotail, resulting in flux-rope structures with large core fields, significant increases in magnetic pressure, and dawn-dusk asymmetries (DiBraccio et al. 2015; Sun et al. 2016; Poh et al. 2017) At the Giant Planets, reconnection in the magnetotail is nearly anti-parallel with no guide field, and loop-like plasmoids exhibit signatures of so-called ‘O-line’ reconnection, where there is no core field and instead there is a depression in magnetic pressure and enhancement in plasma pressure (Vogt et al. 2014; Jackman et al. 2011; DiBraccio and Gershman 2019). At a hybrid magnetosphere such as Mars, the twisted tail associated with changing solar wind conditions (Luhmann et al. 2015; DiBraccio et al. 2018, 2022) and complex draping geometry results in variable core field strength (Briggs et al. 2011; DiBraccio et al. 2015; Hara et al. 2017). A comparison of flux ropes observed in the magnetotails of Mercury, and Saturn are shown in Fig. 13, illustrating similar signatures in the magnetic field data, but with significantly different spatiotemporal scales and core field strengths.

Superposed epoch analysis of tailward traveling flux ropes at (a) Mercury (adapted from DiBraccio et al. 2015) and (b) Saturn (adapted from Jackman et al. 2011) organized in planetocentric coordinates. In each, bipolar signatures in the \(\mathrm{B}_{\mathrm{Z}}\) or \(\mathrm{B}_{\theta}\) component shows a Northward-Southward orientation, indicating tailward flow of the structure. In the Mercury flux rope, the structure duration is ∼1 s and it contains a strong core field as evidenced by the significant enhancement of the magnetic field magnitude (X-line reconnection). In the Saturn case, the structure scale is ∼5 min, with little-to-no core field (O-line reconnection)
The differences in temporal and spatial scales of reconnection structures in planetary magnetospheres each lead to a varying role and relative importance of reconnection in driving magnetospheric dynamics (Russell 2000; Bagenal 2013). The assessment of the contribution of magnetic reconnection at a planetary magnetopause or magnetotail is a strong function of the specific properties of that magnetospheric system. However, the above techniques combined with suitable in situ plasma and fields data have been demonstrated to be highly successful at identifying the presence of active reconnection and can therefore serve as a reliable starting point for more system-level analyses.
5 Scaling Reconnection Across and Beyond the Solar System
As a final consideration, we evaluate the total amount of magnetic energy a magnetized body can extract from its upstream environment. Determination of this energy requires evaluation of the energy conversion rate of magnetic reconnection. The reconnection energy conversion rate (Mozer and Hull 2010; Goodbred et al. 2021) has been less discussed in the planetary magnetospheres literature with the primary focus being the dimensionless rate of reconnection (\(\alpha \)) (Kennel and Coroniti 1977; Holzer and Slavin 1978; Nichols et al. 2006; Kivelson 2007; Slavin et al. 2009, 2010; DiBraccio et al. 2013; Gershman et al. 2016; Zhong et al. 2018; Arridge 2020) or the reconnection electric field (\(\mathrm{E}_{\mathrm{R}}\)) (Nichols et al. 2006; DiBraccio et al. 2013; Slavin et al. 2009; Masters 2014, 2015a, 2018; Newell et al. 2007; Milan et al. 2012).
The reconnection electric field is in units of energy per length (e.g., mV/m). Integrated that electric field along an X-line results in the “reconnection voltage” or “reconnection potential”, i.e., the effective potential difference between opposite ends of the X-line (Masters 2015b). These voltages are typically 10 s of kV. Reconnection voltages are typically used to assess how much energy can be input into a magnetosphere via dayside reconnection as well as quantify the rate of production of open magnetic flux (Nichols et al. 2006; Badman et al. 2014; Zhang et al. 2021). While analyses of reconnection voltage produce instantaneous estimates of how much energization particles can experience (units of energy), they do not typically provide a measurement of the reconnection power, i.e., the rate at which the energy input to a magnetosphere occurs which requires units of energy over time (Tenfjord and Østgaard 2013).
The available magnetic power for an obstacle can be written as the upstream Poynting flux across the area of the obstacle in SI units following Koskinen and Tanskanen (2002) as
where \(\mathrm{P}_{\mathrm{u}}\) scales with the effective area of the magnetopause to the upstream obstacle.
Many coupling functions have been developed for Earth starting with Perreault and Akasofu (1978), Akasofu (1981), and Vasyliunas et al. (1982). These provide scaling for the amount of energy and then are empirically compared with estimates of the total energy in the magnetosphere. After converting to SI units (Koskinen and Tanskanen 2002), the Perrault-Akasofu parameter takes the form of
Here, \(\theta \) represents the shear angle between the fields across the magnetopause, and \(\mathrm{l}_{\mathrm{o}}\) is a characteristic scale length, empirically determined for Earth to be \({\sim} 7~\mathrm{R}_{\mathrm{E}}\) or ∼0.7 RMP (Perreault and Akasofu 1978). We define the coupling efficiency as the ratio \(\mathrm{P}_{\mathrm{MP}}/\mathrm{P}_{\mathrm{u}}\). Evaluating this efficiency for \(\theta =180^{\mathrm{o}}\) gives ∼0.16. This relatively high efficiency compared to other estimates (∼1%) of solar-wind-magnetospheric coupling is due to our use of magnetic energy in \(\mathrm{P}_{\mathrm{u}}\) instead of solar wind kinetic energy (Tenfjord and Østgaard 2013)
The Perrault-Akasofu parameter has been scaled directly to other planets in several studies (Desch and Kaiser 1984; Desch and Rucker 1985; Ip et al. 2004; Zarka 2007). It is important to note that equation (5.2) implicitly assumes that reconnection can occur uniformly over an obstacle and therefore its energy conversion scales as \(\mathrm{R}_{\mathrm{MP}}^{2}\). This assumption can result in large systematic errors in predictions of reconnection-generated energies at non-Earth magnetospheres, as remarked by Baker and Bargatze (1985). Newell et al. (2007) and Tenfjord and Østgaard (2013) investigated the correlation between multiple geomagnetic indices at Earth and different coupling functions (including Perrault-Akasofu). These correlations, although highly effective at Earth for parameterizing the geomagnetic response to changing upstream conditions, are tuned to terrestrial dynamics, limiting their scaling to other magnetospheres.
To scale how much energy can be extracted from an upstream flow by a magnetized obstacle, we directly consider reconnection along a primary magnetopause X-line. Goodbred et al. (2021) recently investigated the scaling of the reconnection energy conversion rate using simulations of symmetric reconnection. They found that the energy conversion rate (converted to SI units here following Koskinen and Tanskanen 2002) scales as,
where \(\alpha \) is the reconnection rate (∼0.05-0.2), \(\xi \) is a factor on the order of unity, \(\mathrm{L}_{\mathrm{X}}\) is the length of the Petschek exhaust region in the presence of secondary tearing (∼60 di) and Ly is the length of the reconnection X-line, taken as ∼1.5 RMP (Trattner et al. 2021). Here, we apply this equation and use the asymmetric Alfvén speed, mass density and magnetic field expressions from Cassak and Shay (2007) and assume that Ly scales with \(\mathrm{R}_{\mathrm{MP}}\). The coupling efficiency of reconnection therefore scales as:
The key distinction between a magnetopause-based scaling and that of the Perrault-Akasofu approach is that the energy conversion rate scales as \(\mathrm{d}_{\mathrm{i}}\mathrm{R}_{\mathrm{MP}}\) (i.e., \(\mathrm{L}_{\mathrm{x}}\mathrm{L}_{\mathrm{y}}\)) instead of \(\mathrm{R}_{\mathrm{MP}}^{2}\) (obstacle size) which produces a fundamentally different scaling across the solar system. As an example, in Fig. 14 we compare the energy conversion surfaces superimposed on example magnetopause magnetic shear plots for Earth, Jupiter, and Uranus. For simplicity, we consider cases where the planetary dipole axis is in the X-Z plane and the IMF is oriented to generate anti-parallel reconnection at the subsolar magnetopause (southward for Earth and Uranus and northward for Jupiter). The left panels on Fig. 15 show surface areas equal to \((0.7~\mathrm{R}_{\mathrm{MP}})^{2}\) (corresponding to a disc with radius ∼0.4 RMP) while the right panels show example X-line with length ∼1.5 RMP and thickness \(60\mathrm{d}_{\mathrm{i}}\). When compared to Earth, the Perrault-Akasofu scaling over- and under-estimates the total interaction area at Jupiter and Uranus, respectively.

Maximum energy conversion surfaces (shown in white) for magnetopause reconnection using the (left) Perrault-Akasofu parameter (i.e., scales with obstacle area) and the (right) Goodbred et al. (2021) approach (i.e., scales with X-line length and ion inertial length) for (a) Earth (\(60\mathrm{d}_{\mathrm{i}} \sim 0.5~\mathrm{R}_{\mathrm{E}}\)), (b) Jupiter (\(60\mathrm{d}_{\mathrm{i}} \sim 0.02~\mathrm{R}_{\mathrm{J}}\)), and (c) Uranus (\(60\mathrm{d}_{\mathrm{i}} \sim 2.5~\mathrm{R}_{\mathrm{U}}\)). Surfaces are overlaid on a magnetic shear plot of the surface of magnetopause projected into the YZ-plane with southward IMF for Earth and Uranus and northward IMF for Jupiter (i.e., \(\theta =180^{\mathrm{o}}\)). The Perrault-Akasofu scaling results in the same conversion efficiency of upstream energy at the magnetopause. The Goodbred et al. scaling results in more and less efficient conversion of upstream magnetic energy at Uranus and Jupiter respectively

Efficiency of magnetic reconnection at planetary magnetopauses and the heliopause at extracting magnetic energy from their respective upstream flows. All values are normalized to Earth per Table 2
Use of the Goodbred et al. (2021) scaling to parameterize energy-conversion at the magnetopause is enabled by MMS-era confirmations that reconnection at Earth’s magnetopause is typically localized along a primary X-line (Trattner et al. 2021; Fuselier et al., this journal). This approach is only valid for \(\mathrm{L}_{\mathrm{X}} \ll \mathrm{L}_{\mathrm{Y}}\), as otherwise the exhaust size approaches the size of the X-line and the geometry defined by Goodbred et al. is no longer directly applicable.
Estimates of reconnection parameters and coupling efficiency at different magnetized bodies are provided in Table 2. Magnetopause standoff distances were calculated from equation (2.8), and planetary size and distances from the Sun were taken from Bagenal (2013). The size of the heliosphere was taken as 120 AU converted to solar radii. In order to derive \(\rho _{\mathrm{asym}}\), \(\mathrm{B}_{\mathrm{asym}}\), and \(\mathrm{V}_{A,\mathrm{asym}}\), we need to obtain estimates of the plasma conditions at the subsolar magnetopause.
For planets in our solar system and HAT-B, which all have upstream \(\mathrm{M}_{\mathrm{MS}} \gg 1\), we first take the relationships,
and
which can be derived using the scalings provided by Gershman and DiBraccio (2020) taking their equations 2 and 6 and solving for \(\mathrm{B}_{2}/\mathrm{B}_{1}\) in equation (3.14) of this study. Here we use a shock compression factor (\(\eta \)) of 4 and PDL depletion factor \(\mathrm{d}_{\mathrm{F}} = 0.85\) (Masters 2018)) We then combine these equations with the relationship between the upstream solar wind pressure and magnetospheric field from equation (2.7) using \(\psi =0\). These values for \(\mathrm{B}_{1}\), \(\mathrm{B}_{2}\), and \(\rho _{1}\) are used to calculate asymmetric reconnection parameters using the Cassak and Shay (2007) formulas assuming \(\rho _{1} < \rho _{2} \) and \(\beta _{1} > \beta _{2}\) and no guide field, i.e., equations (3.1)-(3.3).
For magnetized moons embedded in sub-magnetosonic flows, we take \(\rho _{1} = \rho _{u}\), and \(\mathrm{B}_{1} = \mathrm{B}_{\mathrm{u}}\) and used the above equations with the relationship (3.14) to derive reconnection parameters Basym, Vasym, and \(\rho _{\mathrm{asym}}\).
For induced magnetospheres, the IMB altitude is determined by a pressure balance between the thermal pressure in the magnetosheath and a combination of the magnetic pressure from piled-up flux, crustal fields in the case of Mars, plus thermal pressure from the ionosphere (e.g., Li et al. 2020). In these environments, there can be significant concentrations of cold, heavy ions such that \(\rho _{2} \gg \rho _{1}\). Equations (3.2) therefore can be simplified as be combined to estimate \(\rho _{\mathrm{asym}} \approx \frac{\rho _{2} \left ( \frac{B_{1}}{B_{2}} \right )}{\left ( \frac{B_{1}}{B_{2}} \right ) +1} \). For Mars we assume the dominant species is \(\mathrm{O}_{2}^{+}\) and take \(\mathrm{n}_{2}\sim 50/\mathrm{cc}\) though we note that there is significant variability about both the composition and density (Harada et al. 2018; Ma et al. 2015; Chen et al. 2022; Wang et al. 2021; Nagy et al. 2004; Matsunaga et al. 2017). We then apply equation (5.5) with \(\mathrm{M}_{\mathrm{A}} = 10\) to find \(\mathrm{B}_{1}/\mathrm{B}_{2} = 0.35\) and \(\rho _{\mathrm{asym}} = 415~\mbox{amu}\,\mbox{cm}^{-3}\).
For the heliopause, we take averaged values on either side of the heliopause observed by Voyager 1 and 2 reported by Fuselier et al. (2020a,b) and calculate quantities directly, including the ratio \(\mathrm{B}_{1}/\mathrm{B}_{2}\). The presence of a heliosheath inside of the heliopause boundary results in a higher plasma \(\beta \) than is present in the VLISM such that the approximations made above are no longer valid. A heliosheath is likely common among astrospheres with supermagnetosonic stellar winds where a termination shock would result in compressed and heated plasmas inside a heliopause. By taking the same approximations as above, we find Basym (and VA,asym) underestimated by a factor of \(\sim \sqrt{\beta _{2} +1}\) (arising from the approximation in equation (3.11) going to equation (3.14)) and the efficiency underestimated by a factor of \(\sim \left ( \beta _{2} +1 \right )^{3/2}\). These uncertainties should be taken into account when attempting to scale these results to an astrosphere with less well-constrained plasma properties.
The factors from equation (5.4) (i.e., VA,asym/Vu, \(\mathrm{B}_{\mathrm{asym}}/\mathrm{B}_{\mathrm{U}}\), and \(\mathrm{d}_{\mathrm{i}}/\mathrm{R}_{\mathrm{MP}}\)) are included in the table to understand what parameters drive an increased or reduced energy conversion rate between different planetary bodies. The conversion efficiencies \(\mathrm{P}_{\mathrm{MP}}/\mathrm{P}_{\mathrm{U}}\) in Table 2 normalized to Earth are determined by evaluating equation (5.3) for each planet and dividing by the corresponding value for Earth. These values provide a relative measure of the efficiency of an obstacle at extracting magnetic energy from their upstream flow and are visualized in Fig. 15.
The peak efficiencies derived here assume that reconnection is allowed to take place and has no guide field. The suppression conditions for reconnection are still applicable in this context and may inhibit reconnection at a given magnetopause boundary. The absolute efficiency at a given time will also be a function of the magnetic shear angle across the magnetopause due to the effect of component reconnection, i.e., the use of VAasym,L and Basym,L instead of VA,asym and Basym in equation (5.3).
Absolute conversion energy conversion rates can be estimated by comparing the Goodbred et al. scaling and Perrault-Akasofu scalings at Earth, where we expect \(P_{\mathrm{MP}}/\mathrm{P}_{\mathrm{U}} \approx 0.16\). For this case, we find,
Equation (5.7) can be readily satisfied for reasonable parameters \(\mathrm{L}_{\mathrm{y}} \sim 1.5~\mathrm{R}_{\mathrm{MP}}\), \(\xi \sim 1\), and \(\alpha \sim 0.2\), and \(\mathrm{L}_{\mathrm{X}} \sim 60\mathrm{d}_{\mathrm{i}}\). For these properties, the energy conversion rate in SI units can be estimated as,
From Sect. 3.2, there is an effective factor of \({\sim} \sin^{3}(\theta /2)\) variation of the reconnection magnetic energy density that should apply here due to the VA,asymL BasymL2 factor. A \(90^{\mathrm{o}}\) shear across the magnetopause reduces the energy extracted from anti-parallel reconnection by a factor of ∼3. This \(\sin^{3}(\theta /2)\) variation in the energy conversion rate is in reasonable agreement with the \(\sin^{8/3}(\theta /2)\) correlation by Newell et al. (2007) found at Earth.
The peak absolute efficiency of Mercury is close to ∼1 due to its small obstacle size and upstream Mach number, and the peak efficiency of Jupiter is ∼0.01 due to its extremely large obstacle size. Neptune and Uranus, are surprisingly more efficient at extracting magnetic energy from the solar wind than Earth. This efficiency is driven by significantly larger ratios of ion inertial length to magnetopause at the Ice Giants. We note that HAT-B, which is Neptune-sized, has a significantly lower relative reconnection efficiency than Neptune due to its very low \(\mathrm{B}_{\mathrm{asym}}/\mathrm{B}_{\mathrm{U}}\) ratio.
Comparable efficiencies were not calculated for Ganymede and Triton because \(60\mathrm{d}_{\mathrm{i}} \gg \mathrm{R}_{\mathrm{MP}}\), indicating that the Goodbred et al. (2021) scaling is likely not applicable and spatial suppression effects (see Liu et al. 2019 and Sect. 3) may become relevant. It is possible that for systems with significant Alfvén wings, the effective obstacle size to the upstream flow is much larger, leading to a larger \(\mathrm{L}_{\mathrm{Y}}\). In addition, the ratio \(60\mathrm{d}_{\mathrm{i}}/\mathrm{R}_{\mathrm{MP}}\) at Mercury is ∼0.4 such that its calculated reconnection efficiency may be somewhat overestimated. These smaller bodies may be capable of extracting upstream magnetic energy over nearly their entire dayside magnetopause surface.
Table 3 provides estimates of maximum available power from peak reconnection efficiency at each magnetized planet assuming 0.16 peak efficiency at Earth. For comparison, we include estimated total input powers for planetary aurora, which provide a proxy for estimating the energy driving a magnetosphere. Input powers are coarse estimates that are derived by taking by the total observed auroral emission and dividing by an efficiency, assumed to be ∼10%. The uncertainties in these values are quite large, though it can be highly instructive to compare their orders of magnitude with the available energy conversion rate from magnetic reconnection. From equation (2.8), significant variations in standoff distances observed at Saturn and Jupiter will also result in a different RMP and therefore variations in energy conversion rates, though not by significant enough factors to put them on par with Earth.
At Earth and Neptune, the amount of energy from magnetopause reconnection is more than sufficient to power the auroras, even when considering a factor of ∼3 reduction due to a more typical shear angle of \(\theta =90^{\mathrm{o}}\). At Jupiter, the magnetopause reconnection power is far less than that required, though it is well known that the dominant energy source for the auroras at the gas giants are internally generated within the magnetosphere (Bagenal 2013). However, at Jupiter, for example, polar bright spots (Haewsantati et al. 2021) that may map to the magnetopause require only ∼100-1000 GW of input power, such that it is possible that magnetopause reconnection at Jupiter can power some amount of auroral emission. Interestingly, estimates of auroral input power at Uranus and Saturn are comparable to those expected from magnetopause reconnection, though not necessarily when a factor of ∼3 reduction is included. For Saturn, modulations in auroral brightness can be attributed to variations in the upstream solar wind (Clarke et al. 2009), though these variations are typically associated with changes in dynamic pressure and the compression of Saturn’s magnetosphere rather than magnetopause reconnection (Bagenal 2013), and internal flow shears have been suggested to be the source of the main aurora (Cowley et al. 2004; Bader et al. 2019). For Uranus, there may also be significant internal effects associated with icy moons that lead to additional particle energization within the magnetosphere as suggested by Cheng (1984) and Eviatar and Richardson (1986).
Finally, the above equations and scalings should apply to exoplanets and astrospheres throughout the universe, both for \(\mathrm{M}_{\mathrm{MS}} \ll 1\) and \(\mathrm{M}_{\mathrm{MS}} \gg 1\) systems. The key challenge of modeling reconnection at exoplanets and astrospheres is to develop reasonable estimates for the parameters Basym, \(\rho _{\mathrm{asym}}\), and the relevant upstream values. The capability to provide these estimates, both from the observational perspective and modeling tools are growing despite numerous challenges (Boro Saikia et al. 2020; See et al. 2020; Thomas et al. 2021). Using Zeeman-Doppler imaging data, coarse estimates of equatorial magnetic field strength (Semel 1989; Donati and Brown 1997; Carter et al. 1996; Hackman et al. 2016) have been taken as input to coronal heating models (Vidotto 2017; van der Holst et al. 2014; Cohen et al. 2014; Sakaue and Shibata 2021) and generate estimates of stellar winds and upstream parameters. As discussed, Ben-Jaffel et al. reported the first detection of an exoplanet magnetosphere by identifying an extended tail of carbon ions around the planet and use PIC simulations with a model of the local stellar wind to constrain the internal magnetic field strength of the planet. Likewise, many astrospheres have a visible bow shock that can be used to constrain MHD models (Baalmann et al. 2021 and reference therein). As studies of exoplanets and astrospheres continue, and remote sensing techniques are further refined, it may yet be possible to infer reconnection parameters, providing key constraints on the dynamics of an exoplanet magnetosphere.
6 Concluding Remarks
It is unlikely that there will be an MMS-like constellation flown at a different planetary body in the foreseeable future. Fortunately, the observations and studies of MMS data as well as the theoretical studies and modeling tools developed and refined over the past several years are invaluable for understanding the fundamental plasma physics associated with magnetic reconnection and for revealing how to scale results to other magnetized bodies. The presence of small-scale structures like electron crescents may not be directly observable at other planets, but are almost certainly present, and the macro effects of reconnection, cross-scale coupling, energy transfer, and in-flow/out-flow parameters are all directly relevant in the study of planetary magnetospheres. MMS observations and other spacecraft observations at Earth serve as a crucial test of theoretical models and frameworks that can then be scaled elsewhere. Combined with this theoretical framework, plasma measurements at each body can then be used to estimate the role reconnection can play in the dynamics at a given body. While parametric scaling may assist in the development of an initial high-level understanding of a given system, local conditions play a major role in dynamics. Underexplored magnetospheres in the solar system therefore require in situ plasma measurements to accurately quantify solar-wind-magnetospheric coupling.
References
Akasofu SI (1981) Energy coupling between the solar wind and the magnetosphere. Space Sci Rev 28:121–190. https://doi.org/10.1007/BF00218810
Anderson BJ, Fuselier SA (1993) Magnetic pulsations from 0.1 to 4.0 Hz and associated plasma properties in the Earth’s subsolar magnetosheath and plasma depletion layer. J Geophys Res 98:1461–1479
Anderson BJ, Phan TD, Fuselier SA (1997) Relationships between plasma depletion and subsolar reconnection. J Geophys Res 102(A5):9531–9542. https://doi.org/10.1029/97JA00173
Anderson BJ, Slavin JA, Korth H, Boardsen SA, Zurbuchen TH, Raines JM, Gloeckler G, McNutt RL, Solomon SC (2011) The dayside magnetospheric boundary layer at Mercury. Planet Space Sci 59(15):2037–2050. https://doi.org/10.1016/j.pss.2011.01.010
Archer MO, Horbury TS (2013) Magnetosheath dynamic pressure enhancements: occurrence and typical properties. Ann Geophys 31:319–331. https://doi.org/10.5194/angeo-31-319-2013
Arridge C (2020) Solar wind: interaction with planets. Oxf Res Encycl Phys: 1–34. https://doi.org/10.1093/acrefore/9780190871994.013.15
Arridge CS, Achilleos N, Dougherty MK, Khurana KK, Russell CT (2006) Modeling the size and shape of Saturn’s magnetopause with variable dynamic pressure. J Geophys Res 111(A11227):1–13. https://doi.org/10.1029/2005JA011574
Axford W (1991) A commentary on our present understanding of the Martian magnetosphere. Planet Space Sci 39(1–2):167–173. https://doi.org/10.1016/0032-0633(91)90139-2
Baalmann LR, Scherer K, Kleimann J, Fichtner H, Bomans DJ, Weis K (2021) Simulating observable structures due to a perturbed interstellar medium in front of astrospheric bow shocks in 3D MHD. Astron Astrophys 650(A36):1–13. https://doi.org/10.1051/0004-6361/202039836
Bader A, Badman SV, Cowley SWH, Yao ZH, Ray LC, Kinrade J et al. (2019) The dynamics of Saturn’s main aurorae. Geophys Res Lett 46:10283–10294. https://doi.org/10.1029/2019GL084620
Badman SV, Jackman CM, Nichols JD, Clarke JT, Gérard JC (2014) Open flux in Saturn’s magnetosphere. Icarus 231:137–145. https://doi.org/10.1016/j.icarus.2013.12.004
Bagenal F (2013) Planetary magnetospheres. In: Oswalt TD, French LM, Kalas P (eds) Planets, stars and stellar systems, vol 3: Solar and stellar planetary systems. Springer, Dordrecht, pp 251–307. https://doi.org/10.1007/978-94-007-5606-9_6
Baker DN, Bargatze LF (1985) Proper solar wind power esimtation and planetary radiometric efficiencies. Nature 314:455–456
Belenkaya ES, Khodachenko ML, Alexeev II (2015) Alfvén radius: a key parameter for astrophysical magnetospheres. In: Lammer H, Khodachenko M (eds) Characterizing stellar and exoplanetary environments. Astrophys space sci lib, vol 411. Springer, Cham. https://doi.org/10.1007/978-3-319-09749-7_12
Belenkaya ES, Alexeev II, Blokhina MS (2022) Modeling of magnetospheres of terrestrial exoplanets in the habitable zone around G-type stars. Universe 8(231):1–8. https://doi.org/10.3390/universe8040231
Ben-Jaffel L, Ballester GE, Muñoz AG et al. (2022) Signatures of strong magnetization and a metal-poor atmosphere for a Neptune-sized exoplanet. Nat Astron 6:141–153. https://doi.org/10.1038/s41550-021-01505-x
Boro Saikia S, Jin M, Johnstone CP, Lüftinger T, Güdel M, Airapetian VS, Kislyakova KG, Folsom CP (2020) The solar wind from a stellar perspective. Astron Astrophys 635(A178):1–21. https://doi.org/10.1051/0004-6361/201937107
Borovsky JE (2021) Is our understanding of solar-wind/magnetosphere coupling satisfactory? Front Astron Space Sci 8:1–7. https://doi.org/10.3389/fspas.2021.634073
Borovsky JE, Hesse M, Birn J, Kuznetsova MM (2008) What determines the reconnection rate at the dayside magnetosphere? J Geophys Res 113(A07210):1–17. https://doi.org/10.1029/2007JA012645
Bowers CF, DiBraccio GA, Slavin JA, Gruesbeck JR, Weber T, Xu S et al. (2023) Exploring the solar wind-planetary interaction at Mars: implication for magnetic reconnection. J Geophys Res Space Phys 128:e2022JA030989. https://doi.org/10.1029/2022JA030989
Briggs J, Brain D, Cartwright M, Eastwood J, Halekas J (2011) A statistical study of flux ropes in the Martian magnetosphere. Planet Space Sci 59(13):1498–1505. https://doi.org/10.1016/j.pss.2011.06.010
Burch JL, Torbert RB, Phan TD, Chen LJ, Moore TE, Ergun RE, Eastwood JP, Gershman DJ, Cassak PA, Argall MR, Wang S, Hesse M, Pollock CJ, Giles BL, Nakamura R, Mauk BH, Fuselier SA, Russell CT, Strangeway RJ et al. (2016) Electron-scale measurements of magnetic reconnection in space. Science 352(6290):aaf2939. https://doi.org/10.1126/science.aaf2939
Burch JL, Webster JM, Hesse M, Genestreti KJ, Denton RE, Phan TD et al. (2020) Electron inflow velocities and reconnection rates at Earth’s magnetopause and magnetosheath. Geophys Res Lett 47:e2020GL089082. https://doi.org/10.1029/2020GL089082
Burch JL, Hesse M, Webster JM, Genestreti KJ, Torbert RB, Denton RE, Ergun RE, Giles BL, Gershman DJ, Russell CT, Wang S, Chen LJ, Dokgo K, Hwang KJ, Pollock CJ (2022) The EDR inflow region of a reconnecting current sheet in the geomagnetic tail. Phys Plasmas 29(5):052903. https://doi.org/10.1063/5.0083169
Burlaga LF, Ness NF, Wang YM, Sheeley NR (2002) Heliospheric magnetic field strength and polarity from 1 to 81 AU during the ascending phase of solar cycle 23. J Geophys Res 107(A11):1410. https://doi.org/10.1029/2001JA009217
Cairns IH, Fuselier SA (2017) The plasma depletion layer beyond the heliopause: evidence, implications, and predictions for Voyager 2 and new horizons. Astrophys J 834(2):197. https://doi.org/10.3847/1538-4357/834/2/197
Cairns IH, Fuselier SA (2018) Electron and ion heating due to magnetic reconnection at the heliopause. J Phys Conf Ser 1100:012004. https://doi.org/10.1088/1742-6596/1100/1/012004
Cairns IH, Lyon JG (1996) Magnetic field orientation effects on the standoff distance of Earth’s bow shock. Geophys Res Lett 23(21):2883–2886. https://doi.org/10.1029/96gl02755
Carter B, Brown S, Donati JF, Rees D, Semel M (1996) Zeeman Doppler imaging of stars with the AAT. Publ Astron Soc Aust 13(2):150–155. https://doi.org/10.1017/s1323358000020701
Cassak PA, Otto A (2011) Scaling of the magnetic reconnection rate with symmetric shear flow. Phys Plasmas 18(7):074501. https://doi.org/10.1063/1.3609771
Cassak PA, Shay MA (2007) Scaling of asymmetric magnetic reconnection: general theory and collisional simulations. Phys Plasmas 14(10):102114. https://doi.org/10.1063/1.2795630
Cassak PA, Genestreti KJ, Burch JL, Phan TD, Shay MA, Swisdak M et al. (2017a) The effect of a guide field on local energy conversion during asymmetric magnetic reconnection: particle-in-cell simulations. J Geophys Res Space Phys 122:11523–11542. https://doi.org/10.1002/2017JA024555
Cassak PA, Liu YH, Shay M (2017b) A review of the 0.1 reconnection rate problem. J Plasma Phys 83(5):1–17. https://doi.org/10.1017/s0022377817000666
Chael A, Rowan M, Narayan R, Johnson M, Sironi L (2018) The role of electron heating physics in images and variability of the Galactic Centre black hole Sagittarius A*. Mon Not R Astron Soc 478(4):5209–5229. https://doi.org/10.1093/mnras/sty1261
Chen L-J, Hesse M, Wang S, Bessho N, Daughton W (2016) Electron energization and structure of the diffusion region during asymmetric reconnection. Geophys Res Lett 43:2405–2412. https://doi.org/10.1002/2016GL068243
Chen YQ et al (2022) ApJ 927(171). https://doi.org/10.3847/1538-4357/ac497d
Cheng AF (1984) Magnetosphere, rings, and moons of Uranus. In: NASA conference publication, vol 2330, pp 541–556
Clarke JT (2013) Auroral processes on Jupiter and Saturn. In: Auroral phenomenology and magnetospheric processes: Earth and other planets. Geophys monograph series, vol 197, pp 113–122. https://doi.org/10.1029/2011gm001199
Clarke JT et al. (2009) Response of Jupiter’s and Saturn’s auroral activity to the solar wind. J Geophys Res 114:A05210. https://doi.org/10.1029/2008JA013694
Cohen O, Drake JJ, Glocer A, Garraffo C, Poppenhaeger K, Bell JM, Ridley AJ, Gombosi TI (2014) Magnetospheric structure and atmospheric Joule heating of habitable planets orbitinG M-dwarf stars. Astrophys J 790(1):57. https://doi.org/10.1088/0004-637x/790/1/57
Collinson G, Paterson WR, Bard C, Dorelli J, Glocer A, Sarantos M, Wilson R (2018) New results from Galileo’s first flyby of Ganymede: reconnection-driven flows at the low-latitude magnetopause boundary, crossing the cusp, and icy ionospheric escape. Geophys Res Lett 45:3382–3392. https://doi.org/10.1002/2017GL075487
Cooling BMA, Owen CJ, Schwartz SJ (2001) Role of the magnetosheath flow in determining the motion of open flux tubes. J Geophys Res 106(A9):18763–18775. https://doi.org/10.1029/2000JA000455
Cowley SWH, Bunce EJ, O’Rourke JM (2004) A simple quantitative model of plasma flows and currents in Saturn’s polar ionosphere. J Geophys Res 109:A05212. https://doi.org/10.1029/2003JA010375
Cravens TE, Fowler CM, Brain D, Rahmati A, Xu S, Ledvina SA et al. (2020) Magnetic reconnection in the ionosphere of Mars: the role of collisions. J Geophys Res Space Phys 125:e2020JA028036. https://doi.org/10.1029/2020JA028036
Czechowski A, Grygorczuk J (2017) Heliosphere in a strong interstellar magnetic field. J Phys Conf Ser 900:012004. https://doi.org/10.1088/1742-6596/900/1/012004
Dahani S, Kieokaew R, Génot V, Lavraud B, Chen Y, Michotte de Welle B et al. (2022) The helicity sign of flux transfer event flux ropes and its relationship to the guide field and Hall physics in magnetic reconnection at the magnetopause. J Geophys Res Space Phys 127:e2022JA030686. https://doi.org/10.1029/2022JA030686
Dargent J, Toledo-Redondo S, Divin A, Innocenti ME (2023) Energy conversion by magnetic reconnection in multiple ion temperature plasmas. Geophys Res Lett 50:e2023GL103324. https://doi.org/10.1029/2023GL103324
Denton RE, Sonnerup BUÖ, Russell CT, Hasegawa H, Phan TD, Strangeway RJ et al. (2018) Determining L-M-N current sheet coordinates at the magnetopause from magnetospheric multiscale data. J Geophys Res Space Phys 123:2274–2295. https://doi.org/10.1002/2017JA024619
Desch MD, Kaiser ML (1984) Predictions for Uranus from a radiometric Bode’s law. Nature 310(5980):755–757. https://doi.org/10.1038/310755a0
Desch M, Rucker H (1985) Saturn radio emission and the solar wind: Voyager-2 studies. Adv Space Res 5(4):333–336. https://doi.org/10.1016/0273-1177(85)90159-0
Desroche M, Bagenal F, Delamere PA, Erkaev N (2012) Conditions at the expanded Jovian magnetopause and implications for the solar wind interaction. J Geophys Res 117(A07202):1–18. https://doi.org/10.1029/2012JA017621
Desroche M, Bagenal F, Delamere PA, Erkaev N (2013) Conditions at the magnetopause of Saturn and implications for the solar wind interaction. J Geophys Res Space Phys 118:3087–3095. https://doi.org/10.1002/jgra.50294
Dewey RM, Raines JM, Sun W, Slavin JA, Poh G (2018) MESSENGER observations of fast plasma flows in Mercury’s magnetotail. Geophys Res Lett 45:10110–10118. https://doi.org/10.1029/2018GL079056
DiBraccio GA, Gershman DJ (2019) Voyager 2 constraints on plasmoid-based transport at Uranus. Geophys Res Lett 46:10710–10718. https://doi.org/10.1029/2019GL083909
DiBraccio GA, Slavin JA, Boardsen SA, Anderson BJ, Korth H, Zurbuchen TH, Raines JM, Baker DN, McNutt RL, Solomon SC (2013) MESSENGER observations of magnetopause structure and dynamics at Mercury. J Geophys Res Space Phys 118:997–1008. https://doi.org/10.1002/jgra.50123
DiBraccio GA, Slavin JA, Imber SM, Gershman DJ, Raines JM, Jackman CM, Boardsen SA, Anderson BJ, Korth H, Zurbuchen TH, McNutt RL, Solomon SC (2015) MESSENGER observations of flux ropes in Mercury’s magnetotail. Planet Space Sci 115:77–89. https://doi.org/10.1016/j.pss.2014.12.016
DiBraccio GA, Luhmann JG, Curry SM, Espley JR, Xu S, Mitchell DL et al. (2018) The twisted configuration of the Martian magnetotail: MAVEN observations. Geophys Res Lett 45:4559–4568. https://doi.org/10.1029/2018GL077251
DiBraccio GA, Romanelli N, Bowers CF, Gruesbeck JR, Halekas JS, Ruhunusiri S et al. (2022) A statistical investigation of factors influencing the magnetotail twist at Mars. Geophys Res Lett 49:e2022GL098007. https://doi.org/10.1029/2022GL098007
Dimmock AP, Osmane A, Pulkkinen TI, Nykyri K (2015) A statistical study of the dawn-dusk asymmetry of ion temperature anisotropy and mirror mode occurrence in the terrestrial dayside magnetosheath using THEMIS data. J Geophys Res Space Phys 120:5489–5503. https://doi.org/10.1002/2015JA021192
Donati JF, Brown SF (1997) Zeeman-Doppler imaging of active stars. V. Sensitivity of maximum entropy magnetic maps to field orientation. Astron Astrophys 326:1135–1142
Dorelli JC, Hesse M, Kuznetsova MM, Rastaetter L, Raeder J (2004) A new look at driven magnetic reconnection at the terrestrial subsolar magnetopause. J Geophys Res 109:A12216. https://doi.org/10.1029/2004JA010458
Doss CE, Komar CM, Cassak PA, Wilder FD, Eriksson S, Drake JF (2015) Asymmetric magnetic reconnection with a flow shear and applications to the magnetopause. J Geophys Res Space Phys 120:7748–7763. https://doi.org/10.1002/2015JA021489
Drake JF, Swisdak M, Phan TD, Cassak PA, Shay MA, Lepri ST, Lin RP, Quataert E, Zurbuchen TH (2009) Ion heating resulting from pickup in magnetic reconnection exhausts. J Geophys Res 114:A05111. https://doi.org/10.1029/2008JA013701
Ebert RW et al. (2017) Accelerated flows at Jupiter’s magnetopause: evidence for magnetic reconnection along the dawn flank. Geophys Res Lett 44:4401–4409. https://doi.org/10.1002/2016GL072187
Ebert RW, Fuselier SA, Allegrini F, Bagenal F, Bolton SJ, Clark G et al. (2022) Evidence for magnetic reconnection at Ganymede’s upstream magnetopause during the PJ34 Juno flyby. Geophys Res Lett 49:e2022GL099775. https://doi.org/10.1029/2022GL099775
Eriksson S et al. (2016) Magnetospheric multiscale observations of magnetic reconnection associated with Kelvin-Helmholtz waves. Geophys Res Lett 43:5606–5615. https://doi.org/10.1002/2016GL068783
Eriksson E, Vaivads A, Graham DB, Divin A, Khotyaintsev YV, Yordanova E et al. (2018) Electron energization at a reconnecting magnetosheath current sheet. Geophys Res Lett 45:8081–8090. https://doi.org/10.1029/2018GL078660
Eviatar A, Richardson JD (1986) Predicted satellite plasma tori in the magnetosphere of Uranus. Astrophys J 300:L99–L102. https://doi.org/10.1086/184611
Fang X, Ma Y, Luhmann J, Dong Y, Brain D, Hurley D et al. (2018) The morphology of the solar wind magnetic field draping on the dayside of Mars and its variability. Geophys Res Lett 45:3356–3365. https://doi.org/10.1002/2018GL077230
Farris MH, Petrinec SM, Russell CT (1991) The thickness of the magnetosheath: constraints on the polytropic index. Geophys Res Lett 18(10):1821–1824. https://doi.org/10.1029/91gl02090
Farrugia CJ, Erkaev NV, Biernat HK, Lawrence GR, Elphic RC (1997) Plasma depletion layer model for low Alfvén Mach number: comparison with ISEE observations. J Geophys Res 102(A6):11315–11324. https://doi.org/10.1029/97JA00410
Fischer C, Saur J (2022) Star–planet interaction. Astron Astrophys 668(A10):1–20. https://doi.org/10.1051/0004-6361/202243346
Formisano V, Hedgecock P, Moreno G, Sear J, Bollea D (1971) Observations of Earth’s bow shock for low Mach numbers. Planet Space Sci 19(11):1519–1531. https://doi.org/10.1016/0032-0633(71)90011-0
Fuselier SA, Cairns IH (2017) Reconnection at the heliopause: predictions for Voyager 2. J Phys Conf Ser 900:012007. https://doi.org/10.1088/1742-6596/900/1/012007
Fuselier SA, Anderson BJ, Gary SP, Denton RE (1994) Inverse correlations between the ion temperature anisotropy and plasma beta in the Earth’s quasi-parallel magnetosheath. J Geophys Res 99(A8):14931–14936. https://doi.org/10.1029/94JA00865
Fuselier SA, Trattner KJ, Petrinec SM (2000) Cusp observations of high- and low-latitude reconnection for northward interplanetary magnetic field. J Geophys Res 105(A1):253–266. https://doi.org/10.1029/1999JA900422
Fuselier SA, Frahm R, Lewis WS, Masters A, Mukherjee J, Petrinec SM, Sillanpaa IJ (2014) The location of magnetic reconnection at Saturn’s magnetopause: a comparison with Earth. J Geophys Res Space Phys 119:2563–2578. https://doi.org/10.1002/2013JA019684
Fuselier SA, Petrinec SM, Bobra MG, Cairns IH (2020a) Reconnection at the heliopause: comparing the Voyager 1 and 2 heliopause crossings. J Phys Conf Ser 1620:012004. https://doi.org/10.1088/1742-6596/1620/1/012004
Fuselier SA, Petrinec SM, Sawyer RP, Mukherjee J, Masters A (2020b) Suppression of magnetic reconnection at Saturn’s low-latitude magnetopause. J Geophys Res Space Phys 125:1–16. https://doi.org/10.1029/2020JA027895
Garraffo C, Drake JJ, Cohen O (2016) The missing magnetic morphology term in stellar rotation evolution. Astron Astrophys 595(A110):1–7. https://doi.org/10.1051/0004-6361/201628367
Genestreti KJ, Nakamura TKM, Nakamura R, Denton RE, Torbert RB, Burch JL et al. (2018) How accurately can we measure the reconnection rate EM for the MMS diffusion region event of 11 July 2017? J Geophys Res Space Phys 123:9130–9149. https://doi.org/10.1029/2018JA025711
Gershman DJ, DiBraccio GA (2020) Solar cycle dependence of solar wind coupling with giant planet magnetospheres. Geophys Res Lett 47:e2020GL089315. https://doi.org/10.1029/2020GL089315
Gershman DJ, Slavin JA, Raines JM, Zurbuchen TH, Anderson BJ, Korth H, Baker DN, Solomon SC (2013) Magnetic flux pileup and plasma depletion in Mercury’s subsolar magnetosheath. J Geophys Res Space Phys 118:7181–7199. https://doi.org/10.1002/2013JA019244
Gershman DJ, Dorelli JC, DiBraccio GA, Raines JM, Slavin JA, Poh G, Zurbuchen TH (2016) Ion-scale structure in Mercury’s magnetopause reconnection diffusion region. Geophys Res Lett 43:5935–5942. https://doi.org/10.1002/2016GL069163
Gershman DJ et al. (2017) Juno observations of large-scale compressions of Jupiter’s dawnside magnetopause. Geophys Res Lett 44:7559–7568. https://doi.org/10.1002/2017GL073132
Goodbred M, Liu YH, Chen B, Li X (2021) The relation between the energy conversion rate and reconnection rate in Petschek-type reconnection—implications for solar flares. Phys Plasmas 28(8):082103. https://doi.org/10.1063/5.0050557
Hackman T, Lehtinen J, Rosén L, Kochukhov O, Käpylä MJ (2016) Zeeman-Doppler imaging of active young solar-type stars. Astron Astrophys 587(A28):1–7. https://doi.org/10.1051/0004-6361/201527320
Haewsantati K, Bonfond B, Wannawichian S, Gladstone GR, Hue V, Versteeg MH et al. (2021) Morphology of Jupiter’s polar auroral bright spot emissions via Juno-UVS observations. J Geophys Res Space Phys 126:e2020JA028586. https://doi.org/10.1029/2020JA028586
Hara T et al. (2017) On the origins of magnetic flux ropes in near-Mars magnetotail current sheets. Geophys Res Lett 44:7653–7662. https://doi.org/10.1002/2017GL073754
Hara T, Huang Z, Mitchell DL, DiBraccio GA, Brain DA, Harada Y, Luhmann JG (2022) A comparative study of magnetic flux ropes in the nightside induced magnetosphere of Mars and Venus. J Geophys Res Space Phys 127:e2021JA029867. https://doi.org/10.1029/2021JA029867
Harada Y, Halekas JS, DiBraccio GA, Xu S, Espley J, McFadden JP et al. (2018) Magnetic reconnection on dayside crustal magnetic fields at Mars: MAVEN observations. Geophys Res Lett 45:4550–4558. https://doi.org/10.1002/2018GL077281
Herbert F (2009) Aurora and magnetic field of Uranus. J Geophys Res 114:A11206. https://doi.org/10.1029/2009JA014394
Herbert F, Sandel BR (1994) The Uranian aurora and its relationship to the magnetosphere. J Geophys Res 99(A3):4143–4160. https://doi.org/10.1029/93JA02673
Hesse M, Aunai N, Zenitani S, Kuznetsova M, Birn J (2013) Aspects of collisionless magnetic reconnection in asymmetric systems. Phys Plasmas 20(6):061210. https://doi.org/10.1063/1.4811467
Hesse M, Liu YH, Chen LJ, Bessho N, Wang S, Burch JL, Moretto T, Norgren C, Genestreti KJ, Phan TD, Tenfjord P (2018) The physical foundation of the reconnection electric fields. Phys Plasmas 25(3):032901. https://doi.org/10.1063/1.5021461
Hietala H, Plaschke F (2013) On the generation of magnetosheath high-speed jets by bow shock ripples. J Geophys Res Space Phys 118:7237–7245. https://doi.org/10.1002/2013JA019172
Holzer RE, Slavin JA (1978) Magnetic flux transfer associated with expansions and contractions of the dayside magnetosphere. J Geophys Res 83(A8):3831–3839. https://doi.org/10.1029/JA083iA08p03831
Imber SM, Slavin JA, Boardsen SA, Anderson BJ, Korth H, McNutt RL, Solomon SC (2014) MESSENGER observations of large dayside flux transfer events: do they drive Mercury’s substorm cycle? J Geophys Res Space Phys 119:5613–5623. https://doi.org/10.1002/2014JA019884
Ip WH, Kopp A, Hu JH (2004) On the star-magnetosphere interaction of close-in exoplanets. Astrophys J 602(1):L53–L56. https://doi.org/10.1086/382274
Jackman CM, Slavin JA, Cowley SWH (2011) Cassini observations of plasmoid structure and dynamics: implications for the role of magnetic reconnection in magnetospheric circulation at Saturn. J Geophys Res 116:A10212. https://doi.org/10.1029/2011JA016682
Jackman CM et al. (2014) Saturn’s dynamic magnetotail: a comprehensive magnetic field and plasma survey of plasmoids and traveling compression regions and their role in global magnetospheric dynamics. J Geophys Res Space Phys 119:5465–5494. https://doi.org/10.1002/2013JA019388
Jackman CM, Thomsen MF, Mitchell DG, Sergis N, Arridge CS, Felici M, Badman SV, Paranicas C, Jia X, Hospodarksy GB, Andriopoulou M, Khurana KK, Smith AW, Dougherty MK (2015) Field dipolarization in Saturn’s magnetotail with planetward ion flows and energetic particle flow bursts: evidence of quasi-steady reconnection. J Geophys Res Space Phys 120:3603–3617. https://doi.org/10.1002/2015JA020995
Jackman CM, Thomsen MF, Dougherty MK (2019) Survey of Saturn’s magnetopause and bow shock positions over the entire Cassini mission: boundary statistical properties and exploration of associated upstream conditions. J Geophys Res Space Phys 124:8865–8883. https://doi.org/10.1029/2019JA026628
Jasinski JM, Slavin JA, Arridge CS, Poh G, Jia X, Sergis N, Coates AJ, Jones GH, Waite JH (2016) Flux transfer event observation at Saturn’s dayside magnetopause by the Cassini spacecraft. Geophys Res Lett 43:6713–6723. https://doi.org/10.1002/2016GL069260
Jasinski JM, Akhavan-Tafti M, Sun W, Slavin JA, Coates AJ, Fuselier SA et al. (2021) Flux transfer events at a reconnection-suppressed magnetopause: Cassini observations at Saturn. J Geophys Res Space Phys 126:e2020JA028786. https://doi.org/10.1029/2020JA028786
Jasinski JM, Murphy N, Jia X, Slavin JA (2022) Neptune’s pole-on magnetosphere: dayside reconnection observations by Voyager 2. Planet Sci J 3(4):76. https://doi.org/10.3847/psj/ac5967
Jia X, Walker RJ, Kivelson MG, Khurana KK, Linker JA (2008) Three-dimensional MHD simulations of Ganymede’s magnetosphere. J Geophys Res Space Phys 113:A06212. https://doi.org/10.1029/2007ja012748
Karlsson T, Raptis S, Trollvik H, Nilsson H (2021) Classifying the magnetosheath behind the quasi-parallel and quasi-perpendicular bow shock by local measurements. J Geophys Res Space Phys 126:e2021JA029269. https://doi.org/10.1029/2021JA029269
Kaweeyanun N, Masters A, Jia X (2020) Favorable conditions for magnetic reconnection at Ganymede’s upstream magnetopause. Geophys Res Lett 47:e2019GL086228. https://doi.org/10.1029/2019GL086228
Kennel CF, Coroniti FV (1977) Possible origins of time variability in Jupiter’s outer magnetosphere, 2. Variations in solar wind magnetic field. Geophys Res Lett 4(6):215–218. https://doi.org/10.1029/GL004i006p00215
Khodachenko ML, Sasunov Y, Arkhypov OV, Alexeev II, Belenkaya ES, Lammer H, Kislayakova KG, Odert P, Leitzinger M, Güdel M (2013) Stellar CME activity and its possible influence on exoplanets’ environments: importance of magnetospheric protection. Proc Int Astron Union 8(S300):335–346. https://doi.org/10.1017/S1743921313011174
Kivelson MG (2007) Planetary magnetospheres. In: Kamide Y, Chain A (eds) Handbook of the solar-terrestrial environment. Springer, Berlin, pp 469–492. https://doi.org/10.1007/978-3-540-46315-3_19
Kivelson MG, Bagenal F (2014) Planetary magnetospheres. In: Spohn T, Breuer D, Johnson TV (eds) Encyclopedia of the solar system. Elsevier, Amsterdam, pp 137–157. https://doi.org/10.1016/B978-0-12-415845-0.00007-4
Kivelson MG, Jia X (2013) An MHD model of Ganymede’s mini-magnetosphere suggests that the heliosphere forms in a sub-Alfvénic flow. J Geophys Res Space Phys 118:6839–6846. https://doi.org/10.1002/2013JA019130
Kobayashi S, Rogers BN, Numata R (2014) Gyrokinetic simulations of collisionless reconnection in turbulent non-uniform plasmas. Phys Plasmas 21(4):040704. https://doi.org/10.1063/1.4873703
Kobel E, Flückiger EO (1994) A model of the steady state magnetic field in the magnetosheath. J Geophys Res 99(A12):23617–23622. https://doi.org/10.1029/94JA01778
Koskinen HEJ, Tanskanen E (2002) Magnetospheric energy budget and the epsilon parameter. J Geophys Res 107(A11):1415. https://doi.org/10.1029/2002JA009283
Lamy L (2020) Auroral emissions from Uranus and Neptune. Philos Trans R Soc A, Math Phys Eng Sci 378(2187):20190481. https://doi.org/10.1098/rsta.2019.0481
Lavraud B, Borovsky JE (2008) Altered solar wind-magnetosphere interaction at low Mach numbers: coronal mass ejections. J Geophys Res 113:A00B08. https://doi.org/10.1029/2008JA013192
Lee LC, Fu ZF (1986) Multiple x-line reconnection: 1. A criterion for the transition from a single x-line to a multiple x-line reconnection. J Geophys Res 91:6807–6815
Li X, Liu Y-H (2021) The effect of thermal pressure on collisionless magnetic reconnection rate. Astrophys J 912(2):152. https://doi.org/10.3847/1538-4357/abf48c
Li W et al. (2016) Kinetic evidence of magnetic reconnection due to Kelvin-Helmholtz waves. Geophys Res Lett 43:5635–5643. https://doi.org/10.1002/2016GL069192
Li S, Lu H, Cui J, Yu Y, Mazelle C, Li Y, Cao J (2020) Effects of a dipole-like crustal field on solar wind interaction with Mars. Earth Planet Phys 4:23–31. https://doi.org/10.26464/epp2020005
Lindqvist P-A, Mozer FS (1990) The average tangential electric field at the noon magnetopause. J Geophys Res 95:17137–17144
Liu YH, Hesse M (2016) Suppression of collisionless magnetic reconnection in asymmetric current sheets. Phys Plasmas 23(6):060704. https://doi.org/10.1063/1.4954818
Liu Y-H, Hesse M, Kuznetsova M (2015) Orientation of X lines in asymmetric magnetic reconnection—mass ratio dependency. J Geophys Res Space Phys 120:7331–7341. https://doi.org/10.1002/2015JA021324
Liu Y-H, Hesse M, Li TC, Kuznetsova M, Le A (2018) Orientation and stability of asymmetric magnetic reconnection x line. J Geophys Res Space Phys 123:4908–4920. https://doi.org/10.1029/2018JA025410
Liu YH, Li TC, Hesse M, Sun WJ, Liu J, Burch J et al. (2019) Three-dimensional magnetic reconnection with a spatially confined X-line extent: implications for dipolarizing flux bundles and the dawn-dusk asymmetry. J Geophys Res Space Phys 124:2819–2830. https://doi.org/10.1029/2019JA026539
Liuzzo L, Paty C, Cochrane C, Nordheim T, Luspay-Kuti A, Castillo-Rogez J et al. (2021) Triton’s variable interaction with Neptune’s magnetospheric plasma. J Geophys Res Space Phys 126(11):1–27. https://doi.org/10.1029/2021JA029740
Luhmann J, Ledvina S, Russell C (2004) Induced magnetospheres. Adv Space Res 33(11):1905–1912. https://doi.org/10.1016/j.asr.2003.03.031
Luhmann JG, Dong C, Ma Y, Curry SM, Mitchell D, Espley J, Connerney J, Halekas J, Brain DA, Jakosky BM et al. (2015) Implications of MAVEN Mars near-wake measurements and models. Geophys Res Lett 42:9087–9094. https://doi.org/10.1002/2015GL066122
Ma YJ, Russell CT, Fang X, Dong Y, Nagy AF, Toth G, Halekas JS, Connerney JEP, Espley JR, Mahaffy PR et al. (2015) MHD model results of solar wind interaction with Mars and comparison with MAVEN plasma observations. Geophys Res Lett 42:9113–9120. https://doi.org/10.1002/2015GL065218
Masters A (2014) Magnetic reconnection at Uranus’ magnetopause. J Geophys Res Space Phys 119:5520–5538. https://doi.org/10.1002/2014JA020077
Masters A (2015a) Magnetic reconnection at Neptune’s magnetopause. J Geophys Res Space Phys 120:479–493. https://doi.org/10.1002/2014JA020744
Masters A (2015b) The dayside reconnection voltage applied to Saturn’s magnetosphere. Geophys Res Lett 42:2577–2585. https://doi.org/10.1002/2015GL063361
Masters A (2018) A more viscous-like solar wind interaction with all the giant planets. Geophys Res Lett 45:7320–7329. https://doi.org/10.1029/2018GL078416
Masters A, Mitchell DG, Coates AJ, Dougherty MK (2011) Saturn’s low-latitude boundary layer: 1. Properties and variability. J Geophys Res 116:A06210. https://doi.org/10.1029/2010JA016421
Masters A, Eastwood JP, Swisdak M, Thomsen MF, Russell CT, Sergis N, Crary FJ, Dougherty MK, Coates AJ, Krimigis SM (2012) The importance of plasma \(\beta \) conditions for magnetic reconnection at Saturn’s magnetopause. Geophys Res Lett 39:L08103. https://doi.org/10.1029/2012GL051372
Matsunaga K, Seki K, Brain DA, Hara T, Masunaga K, Mcfadden JP et al. (2017) Statistical study of relations between the induced magnetosphere, ion composition, and pressure balance boundaries around Mars based on MAVEN observations. J Geophys Res Space Phys 122:9723–9737. https://doi.org/10.1002/2017JA024217
Michotte de Welle B, Aunai N, Nguyen G, Lavraud B, Génot V, Jeandet A, Smets R (2022) Global three-dimensional draping of magnetic field lines in Earth’s magnetosheath from in-situ spacecraft measurements. J Geophys Res Space Phys 127:e2022JA030996. https://doi.org/10.1029/2022JA030996
Milan SE, Gosling JS, Hubert B (2012) Relationship between interplanetary parameters and the magnetopause reconnection rate quantified from observations of the expanding polar cap. J Geophys Res 117:A03226. https://doi.org/10.1029/2011JA017082
Montgomery J, Ebert RW, Clark G, Fuselier SA, Allegrini F, Bagenal F et al. (2022) Investigating the occurrence of magnetic reconnection at Jupiter’s dawn magnetopause during the Juno era. Geophys Res Lett 49:e2022GL099141. https://doi.org/10.1029/2022GL099141
Mozer FS, Hull A (2010) Scaling the energy conversion rate from magnetic field reconnection to different bodies. Phys Plasmas 17(10):102906. https://doi.org/10.1063/1.3504224
Mozer FS, Retinò A (2007) Quantitative estimates of magnetic field reconnection properties from electric and magnetic field measurements. J Geophys Res 112:A10206. https://doi.org/10.1029/2007JA012406
Nagy AF et al. (2004) The plasma environment of Mars. In: Winterhalter D, Acuña M, Zakharov A (eds) Mars’ magnetism and its interaction with the solar wind. Space sciences series of ISSI, vol 18. Springer, Dordrecht. https://doi.org/10.1007/978-0-306-48604-3_2
Nakamura TKM, Hasegawa H, Daughton W et al. (2017) Turbulent mass transfer caused by vortex induced reconnection in collisionless magnetospheric plasmas. Nat Commun 8:1582. https://doi.org/10.1038/s41467-017-01579-0
Nakamura TKM, Blasl KA, Hasegawa H, Umeda T, Liu YH, Peery SA, Plaschke F, Nakamura R, Holmes JC, Stawarz JE, Nystrom WD (2022) Multi-scale evolution of Kelvin–Helmholtz waves at the Earth’s magnetopause during southward IMF periods. Phys Plasmas 29(1):012901. https://doi.org/10.1063/5.0067391
Ness N, Behannon K, Lepping R, Whang Y (1976) Observations of Mercury’s magnetic field. Icarus 28(4):479–488. https://doi.org/10.1016/0019-1035(76)90121-4
Ness NF, Acuna MH, Behannon KW, Neubauer FM (1982) The induced magnetosphere of Titan. J Geophys Res 87(A3):1369–1381. https://doi.org/10.1029/JA087iA03p01369
Ness NF, Acuña MH, Behannon KW, Burlaga LF, Connerney JEP, Lepping RP, Neubauer FM (1986) Magnetic fields at Uranus. Science 233(4759):85–89. https://doi.org/10.1126/science.233.4759.85
Neubauer F (1980) Nonlinear standing Alfvén wave current system at Io: theory. J Geophys Res 85(A3):1171–1178. https://doi.org/10.1029/JA085iA03p01171
Neubauer FM (1999) Alfvén wings and electromagnetic induction in the interiors: Europa and Callisto. J Geophys Res 104(A12):28671–28684. https://doi.org/10.1029/1999JA900217
Newell PT, Sotirelis T, Liou K, Meng CI, Rich FJ (2007) A nearly universal solar wind-magnetosphere coupling function inferred from 10 magnetospheric state variables. J Geophys Res 112:A01206. https://doi.org/10.1029/2006JA012015
Nichols JD, Cowley SWH, McComas DJ (2006) Magnetopause reconnection rate estimates for Jupiter’s magnetosphere based on interplanetary measurements at ∼5 AU. Ann Geophys 24:393–406. https://doi.org/10.5194/angeo-24-393-2006
Parker EN (1958) Dynamics of the interplanetary gas and magnetic fields. Astrophys J 128:664–675. https://doi.org/10.1086/146579
Parker EN (1963) Interplanetary dynamical processes. Interscience, New York
Perreault P, Akasofu SI (1978) A study of geomagnetic storms. Geophys J Int 54(3):547–573. https://doi.org/10.1111/j.1365-246x.1978.tb05494.x
Petrinec SM, Russell CT (1997) Hydrodynamic and mhd equations across the bow shock and along the surfaces of planetary obstacles. Space Sci Rev 79(3–4):757–791. https://doi.org/10.1023/A:1004938724300
Petrinec SM, Trattner KJ, Fuselier SA (2003) Steady reconnection during intervals of northward IMF: implications for magnetosheath properties. J Geophys Res 108(A12):1458. https://doi.org/10.1029/2003JA009979
Phan TD, Drake JF, Shay MA, Mozer FS, Eastwood JP (2007) Evidence for an elongated (>60 ion skin depths) electron diffusion region during fast magnetic reconnection. Phys Rev Lett 99:255002
Phan TD, Paschmann G, Gosling JT, Oieroset M, Fujimoto M, Drake JF, Angelopoulos V (2013a) The dependence of magnetic reconnection on plasma \(\beta \) and magnetic shear: evidence from magnetopause observations. Geophys Res Lett 40:11–16. https://doi.org/10.1029/2012GL054528
Phan TD, Shay MA, Gosling JT, Fujimoto M, Drake JF, Paschmann G, Oieroset M, Eastwood JP, Angelopoulos V (2013b) Electron bulk heating in magnetic reconnection at Earth’s magnetopause: dependence on the inflow Alfvén speed and magnetic shear. Geophys Res Lett 40:4475–4480. https://doi.org/10.1002/grl.50917
Phan TD, Drake JF, Shay MA, Gosling JT, Paschmann G, Eastwood JP, Oieroset M, Fujimoto M, Angelopoulos V (2014) Ion bulk heating in magnetic reconnection exhausts at Earth’s magnetopause: dependence on the inflow Alfvén speed and magnetic shear angle. Geophys Res Lett 41:7002–7010. https://doi.org/10.1002/2014GL061547
Phan TD, Eastwood JP, Shay MA et al. (2018) Electron magnetic reconnection without ion coupling in Earth’s turbulent magnetosheath. Nature 557:202–206. https://doi.org/10.1038/s41586-018-0091-5
Phan TD, Verniero JL, Larson D, Lavraud B, Drake JF, Øieroset M et al. (2022) Parker Solar Probe observations of solar wind energetic proton beams produced by magnetic reconnection in the near-Sun heliospheric current sheet. Geophys Res Lett 49:e2021GL096986. https://doi.org/10.1029/2021GL096986
Plaschke F, Hietala H, Angelopoulos V (2013) Anti-sunward high-speed jets in the subsolar magnetosheath. Ann Geophys 31:1877–1889. https://doi.org/10.5194/angeo-31-1877-2013
Poh G, Slavin JA, Jia X, Raines JM, Imber SM, Sun WJ, Gershman DJ, DiBraccio GA, Genestreti KJ, Smith AW (2017) Coupling between Mercury and its nightside magnetosphere: cross-tail current sheet asymmetry and substorm current wedge formation. J Geophys Res Space Phys 122:8419–8433. https://doi.org/10.1002/2017JA024266
Raeder J (2006) Flux transfer events: 1. Generation mechanism for strong southward IMF. Ann Geophys 24:381–392
Richardson JD, Burlaga LF, Elliott H et al. (2022) Observations of the outer heliosphere, heliosheath, and interstellar medium. Space Sci Rev 218(4):35. https://doi.org/10.1007/s11214-022-00899-y
Romanelli N, Gómez D, Bertucci C, Delva M (2014) Steady-state magnetohydrodynamic flow around an unmagnetized conducting sphere. Astrophys J 789(1):43. https://doi.org/10.1088/0004-637x/789/1/43
Romanelli N, DiBraccio GA, Modolo R, Connerney JEP, Ebert RW, Martos YM et al. (2022) Juno magnetometer observations at Ganymede: comparisons with a global hybrid simulation and indications of magnetopause reconnection. Geophys Res Lett 49:e2022GL099545. https://doi.org/10.1029/2022GL099545
Russell C (1995) A study of flux transfer events at different planets. Adv Space Res 16(4):159–163. https://doi.org/10.1016/0273-1177(95)00224-3
Russell C (2000) Reconnection in planetary magnetospheres. Adv Space Res 26(3):393–404. https://doi.org/10.1016/s0273-1177(99)01077-7
Russell CT, Elphic RC (1979) ISEE observations of flux transfer events at the dayside magnetopause. Geophys Res Lett 6(1):33–36. https://doi.org/10.1029/GL006i001p00033
Sakaue T, Shibata K (2021) An M dwarf’s chromosphere, corona, and wind connection via nonlinear Alfvén waves. Astrophys J 919(1):29. https://doi.org/10.3847/1538-4357/ac0e34
Sawyer RP, Fuselier SA, Mukherjee J, Petrinec SM (2019) An investigation of flow shear and diamagnetic drift effects on magnetic reconnection at Saturn’s dawnside magnetopause. J Geophys Res Space Phys 124:8457–8473. https://doi.org/10.1029/2019JA026696
Schwadron NA, McComas DJ (2021) Between local interstellar magnetic and dynamic pressure balance of heliospheric boundaries measured with the IBEX ribbon—a new paradigm. Astrophys J 914(2):129. https://doi.org/10.3847/1538-4357/abfe6b
See V, Lehmann L, Matt SP, Finley AJ (2020) How much do underestimated field strengths from Zeeman–Doppler imaging affect spin-down torque estimates? Astrophys J 894(1):69. https://doi.org/10.3847/1538-4357/ab7918
Semel M (1989) Zeeman-Doppler imaging of active stars. I – basic principles. Astron Astrophys 225(2):456–466
Shay MA, Drake JF, Rogers BN, Denton RE (1999) The scaling of collisionless, magnetic reconnection for large systems. Geophys Res Lett 26(14):2163–2166. https://doi.org/10.1029/1999gl900481
Shay MA, Haggerty CC, Phan TD, Drake JF, Cassak PA, Wu P, Oieroset M, Swisdak M, Malakit K (2014) Electron heating during magnetic reconnection: a simulation scaling study. Phys Plasmas 21(12):122902
Simon S (2015) An analytical model of sub-Alfvénic moon-plasma interactions with application to the hemisphere coupling effect. J Geophys Res Space Phys 120:7209–7227. https://doi.org/10.1002/2015JA021529
Slavin JA, Smith MF, Mazur EL, Baker DN, Hones EW, Iyemori T, Greenstadt EW (1993) ISEE 3 observations of traveling compression regions in the Earth’s magnetotail. J Geophys Res 98(A9):15425–15446. https://doi.org/10.1029/93JA01467
Slavin JA, Acuña MH, Anderson BJ, Baker DN, Benna M, Boardsen SA, Gloeckler G, Gold RE, Ho GC, Korth H, Krimigis SM, McNutt RL, Raines JM, Sarantos M, Schriver D, Solomon SC, Trávníček P, Zurbuchen TH (2009) MESSENGER observations of magnetic reconnection in Mercury’s magnetosphere. Science 324(5927):606–610. https://doi.org/10.1126/science.1172011
Slavin JA et al. (2010) MESSENGER observations of large flux transfer events at Mercury. Geophys Res Lett 37:L02105. https://doi.org/10.1029/2009GL041485
Slavin JA et al. (2012) MESSENGER observations of a flux-transfer-event shower at Mercury. J Geophys Res 117:A00M06. https://doi.org/10.1029/2012JA017926
Slavin JA et al. (2014) MESSENGER observations of Mercury’s dayside magnetosphere under extreme solar wind conditions. J Geophys Res Space Phys 119:8087–8116. https://doi.org/10.1002/2014JA020319
Smith CW, Matthaeus WH, Zank GP, Ness NF, Oughton S, Richardson JD (2001) Heating of the low-latitude solar wind by dissipation of turbulent magnetic fluctuations. J Geophys Res Space Phys 106(A5):8253–8272. https://doi.org/10.1029/2000ja000366
Soderlund KM, Stanley S (2020) The underexplored frontier of ice giant dynamos. Philos Trans R Soc A, Math Phys Eng Sci 378(2187):20190479
Song P (2001) Model predictions of magnetosheath conditions. In: Song P, Singer HJ, Siscoe GL (eds) Space weather. Geophysical monograph, vol 125. Am Geophys Union, pp 249–255. https://doi.org/10.1029/GM125p0249
Sonnerup BUÖ (1974) Magnetopause reconnection rate. J Geophys Res 79(10):1546–1549. https://doi.org/10.1029/JA079i010p01546
Sonnerup BUÖ, Cahill LJ (1967) Magnetopause structure and attitude from Explorer 12 observations. J Geophys Res 72(1):171–183. https://doi.org/10.1029/JZ072i001p00171
Sonnerup BUÖ, Lotko W (1990) The magnetopause boundary layer. In: Defense Technical Information Center (AD-A229 061). Geophysics Laboratory Air Force Systems Command United States Air Force. Retrieved April 18, 2023. https://apps.dtic.mil/sti/pdfs/ADA229061.pdf
Sonnerup BUÖ, Scheible M: (1998) Minimum and maximum variance analysis. ISSI Scientific Reports Series 1:185–220
Southwood DJ, Kivelson MG (1995) Magnetosheath flow near the subsolar magnetopause: Zwan-Wolf and Southwood-Kivelson theories reconciled. Geophys Res Lett 22(23):3275–3278. https://doi.org/10.1029/95gl03131
Southwood DJ, Farrugia CJ, Saunders MA (1988) What are flux transfer events? Planet Space Sci 36:503–508
Spreiter JR, Alksne AY (1970) Solar-wind flow past objects in the solar system. Annu Rev Fluid Mech 2(1):313–354. https://doi.org/10.1146/annurev.fl.02.010170.001525
Spreiter JR, Summers AL, Alksne AY (1966) Hydromagnetic flow around the magnetosphere. Planet Space Sci 14(3):223–253. https://doi.org/10.1016/0032-0633(66)90124-3
Stanley S, Bloxham J (2006) Numerical dynamo models of Uranus’ and Neptune’s magnetic fields. Icarus 184(2):556–572. https://doi.org/10.1016/j.icarus.2006.05.005
Stawarz JE, Eastwood JP, Phan TD, Gingell IL, Pyakurel PS, Shay MA et al. (2022) Turbulence-driven magnetic reconnection and the magnetic correlation length: observations from magnetospheric multiscale in Earth’s magnetosheath. Phys Plasmas 29(1):012302. https://doi.org/10.1063/5.0071106
Sun WJ, Fu SY, Slavin JA, Raines JM, Zong QG, Poh GK, Zurbuchen TH (2016) Spatial distribution of Mercury’s flux ropes and reconnection fronts: MESSENGER observations. J Geophys Res Space Phys 121:7590–7607. https://doi.org/10.1002/2016JA022787
Sun WJ, Slavin JA, Dewey RM, Chen Y, DiBraccio GA, Raines JM et al. (2020b) MESSENGER observations of Mercury’s nightside magnetosphere under extreme solar wind conditions: reconnection-generated structures and steady convection. J Geophys Res Space Phys 125:e2019JA027490. https://doi.org/10.1029/2019JA027490
Sun WJ, Slavin JA, Smith AW, Dewey RM, Poh GK, Jia X et al. (2020a) Flux transfer event showers at Mercury: dependence on plasma \(\beta \) and magnetic shear and their contribution to the Dungey cycle. Geophys Res Lett 47:e2020GL089784. https://doi.org/10.1029/2020GL089784
Sun W, Slavin JA, Nakamura R, Heyner D, Trattner KJ, Mieth JZD, Zhao J, Zong QG, Aizawa S, Andre N, Saito Y (2022) Dayside magnetopause reconnection and flux transfer events under radial interplanetary magnetic field (IMF): BepiColombo Earth-flyby observations. Ann Geophys 40:217–229. https://doi.org/10.5194/angeo-40-217-2022
Sundberg T et al. (2012) MESSENGER observations of dipolarization events in Mercury’s magnetotail. J Geophys Res 117:A00M03. https://doi.org/10.1029/2012JA017756
Swisdak M, Drake JF (2007) Orientation of the reconnection X-line. Geophys Res Lett 34:L11106. https://doi.org/10.1029/2007GL029815
Swisdak M, Rogers BN, Drake JF, Shay MA (2003) Diamagnetic suppression of component magnetic reconnection at the magnetopause. J Geophys Res 108(A5):1218. https://doi.org/10.1029/2002JA009726
Swisdak M, Opher M, Drake JF, Alouani Bibi F (2010) The vector direction of the interstellar magnetic field outside the heliosphere. Astrophys J, 710(2):1769–1775. https://doi.org/10.1088/0004-637x/710/2/1769
Tenfjord P, Østgaard N (2013) Energy transfer and flow in the solar wind-magnetosphere-ionosphere system: a new coupling function. J Geophys Res Space Phys 118:5659–5672. https://doi.org/10.1002/jgra.50545
Thomas AEL, Chaplin WJ, Basu S, Rendle B, Davies G, Miglio A (2021) Impact of magnetic activity on inferred stellar properties of main-sequence Sun-like stars. Mon Not R Astron Soc 502(4):5808–5820. https://doi.org/10.1093/mnras/stab354
Toledo-Redondo S et al. (2017) Energy budget and mechanisms of cold ion heating in asymmetric magnetic reconnection. J Geophys Res Space Phys 122:9396–9413. https://doi.org/10.1002/2017JA024553
Toledo-Redondo S, Dargent J, Aunai N, Lavraud B, André M, Li W et al. (2018) Perpendicular current reduction caused by cold ions of ionospheric origin in magnetic reconnection at the magnetopause: particle-in-cell simulations and spacecraft observations. Geophys Res Lett 45:10,033–10,042. https://doi.org/10.1029/2018GL079051
Toledo-Redondo S, André M, Aunai N, Chappell CR, Dargent J, Fuselier SA et al. (2021) Impacts of ionospheric ions on magnetic reconnection and Earth’s magnetosphere dynamics. Rev Geophys 59:e2020RG000707. https://doi.org/10.1029/2020RG000707
Trattner KJ, Mulcock JS, Petrinec SM, Fuselier SA (2007) Probing the boundary between antiparallel and component reconnection during southward interplanetary magnetic field conditions. J Geophys Res 112:A08210. https://doi.org/10.1029/2007JA012270
Trattner KJ, Petrinec SM, Fuselier SA, Phan TD (2012) The location of reconnection at the magnetopause: testing the maximum magnetic shear model with THEMIS observations. J Geophys Res 117:A01201. https://doi.org/10.1029/2011JA016959
Trattner KJ, Petrinec SM, Fuselier SA (2021) The location of magnetic reconnection at Earth’s magnetopause. Space Sci Rev 217:41. https://doi.org/10.1007/s11214-021-00817-8
van der Holst B, Sokolov IV, Meng X, Jin M, Manchester IV WB, Tóth G, Gombosi TI (2014) Alfvén wave solar model (AWSoM): coronal heating. Astrophys J 782(2):81. https://doi.org/10.1088/0004-637x/782/2/81
Vasyliunas VM, Kan JR, Siscoe GL, Akasofu SI (1982) Scaling relations governing magnetospheric energy transfer. Planet Space Sci 30(4):359–365. https://doi.org/10.1016/0032-0633(82)90041-1
Vernisse Y et al. (2016) Signatures of complex magnetic topologies from multiple reconnection sites induced by Kelvin-Helmholtz instability. J Geophys Res Space Phys 121:9926–9939. https://doi.org/10.1002/2016JA023051
Vidotto A (2017) Stellar coronal and wind models: impact on exoplanets. In: Deeg H, Belmonte J (eds) Handbook of exoplanets. Springer, Cham, pp 1–20. https://doi.org/10.1007/978-3-319-30648-3_26-1
Vidotto AA, Gregory SG, Jardine M, Donati JF, Petit P, Morin J, Folsom CP, Bouvier J, Cameron AC, Hussain G, Marsden S, Waite IA, Fares R, Jeffers S, do Nascimento JD (2014) Stellar magnetism: empirical trends with age and rotation. Mon Not R Astron Soc 441(3):2361–2374. https://doi.org/10.1093/mnras/stu728
Vogt MF, Jackman CM, Slavin JA, Bunce EJ, Cowley SWH, Kivelson MG, Khurana KK (2014) Structure and statistical properties of plasmoids in Jupiter’s magnetotail. J Geophys Res Space Phys 119:821–843. https://doi.org/10.1002/2013JA019393
Vogt MF, Connerney JEP, DiBraccio GA, Wilson RJ, Thomsen MF, Ebert RW et al. (2020) Magnetotail reconnection at Jupiter: a survey of Juno magnetic field observations. J Geophys Res Space Phys 125:e2019JA027486. https://doi.org/10.1029/2019JA027486
Vörös Z, Yordanova E, Varsani A, Genestreti KJ, Khotyaintsev YV, Li W et al. (2017) MMS observation of magnetic reconnection in the turbulent magnetosheath. J Geophys Res Space Phys 122:11442–11467. https://doi.org/10.1002/2017JA024535
Wang S, Kistler LM, Mouikis CG, Petrinec SM (2015) Dependence of the dayside magnetopause reconnection rate on local conditions. J Geophys Res Space Phys 120:6386–6408. https://doi.org/10.1002/2015JA021524
Wang J, Yu J, Xu X, Cui J, Cao J, Ye Y et al. (2021) MAVEN observations of magnetic reconnection at Martian induced magnetopause. Geophys Res Lett 48:e2021GL095426. https://doi.org/10.1029/2021GL095426
Wilder FD, Ergun RE, Burch JL, Ahmadi N, Eriksson S, Phan TD et al. (2018) The role of the parallel electric field in electron-scale dissipation at reconnecting currents in the magnetosheath. J Geophys Res Space Phys 123:6533–6547. https://doi.org/10.1029/2018JA025529
Wilson F, Neukirch T, Hesse M, Harrison MG, Stark CR (2016) Particle-in-cell simulations of collisionless magnetic reconnection with a non-uniform guide field. Phys Plasmas 23(3):032302. https://doi.org/10.1063/1.4942939
Yordanova E et al. (2016) Electron scale structures and magnetic reconnection signatures in the turbulent magnetosheath. Geophys Res Lett 43:5969–5978. https://doi.org/10.1002/2016GL069191
Zank GP, Heerikhuisen J, Wood BE, Pogorelov NV, Zirnstein E, McComas DJ (2012) Heliospheric structure: the bow wave and the hydrogen wall. Astrophys J 763(1):20. https://doi.org/10.1088/0004-637x/763/1/20
Zarka P (2007) Plasma interactions of exoplanets with their parent star and associated radio emissions. Planet Space Sci 55(5):598–617. https://doi.org/10.1016/j.pss.2006.05.045
Zhang TL et al. (2012) Giant flux ropes observed in the magnetized ionosphere at Venus. Geophys Res Lett 39:L23103. https://doi.org/10.1029/2012GL054236
Zhang B, Delamere PA, Yao Z, Bonfond B, Lin D, Sorathia KA, Brambles OJ, Lotko W, Garretson JS, Merkin VG, Grodent D, Dunn WR, Lyon JG (2021) How Jupiter’s unusual magnetospheric topology structures its aurora. Sci Adv 7(15):1–6. https://doi.org/10.1126/sciadv.abd1204
Zhong J, Wei Y, Pu ZY, Wang XG, Wan WX, Slavin JA, Cao X, Raines JM, Zhang H, Xiao CJ, Du AM, Wang RS, Dewey RM, Chai LH, Rong ZJ, Li Y (2018) MESSENGER observations of rapid and impulsive magnetic reconnection in Mercury’s magnetotail. Astrophys J 860(2):L20. https://doi.org/10.3847/2041-8213/aaca92
Zwan BJ, Wolf RA (1976) Depletion of solar wind plasma near a planetary boundary. J Geophys Res 81(10):1636–1648. https://doi.org/10.1029/JA081i010p01636
Funding
This research was supported by the National Aeronautics and Space Administration (NASA) Magnetospheric Multiscale Mission (MMS) in association with NASA contract NNG04EB99C. YL is grateful for the support from NASA grants 80NSSC21K2048 and 80NSSC20K131.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Competing Interests
The majority of this research was supported by the National Aeronautics and Space Administration (NASA) Magnetospheric Multiscale Mission (MMS) in association with NASA contract NNG04EB99C. In addition, YL is supported from NASA grants 80NSSC21K2048 and 80NSSC20K1316, and J.E.S. is supported by the Royal Society Research Fellowship URF\(\backslash\)R1\(\backslash\)201286. The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Gershman, D.J., Fuselier, S.A., Cohen, I.J. et al. Magnetic Reconnection at Planetary Bodies and Astrospheres. Space Sci Rev 220, 7 (2024). https://doi.org/10.1007/s11214-023-01017-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11214-023-01017-2