
Abstract
In this paper, fitted mesh numerical scheme is presented for solving singularly perturbed parabolic convection–diffusion problem exhibiting twin boundary layers. To approximate the solution, we discretize the temporal variable on uniform mesh and discretize the spatial one on piecewise uniform mesh of the Shishkin mesh type. The resulting scheme is shown to be almost first order convergent that accelerated to almost second order convergent by applying the Richardson extrapolation technique. Stability and consistency of the proposed method are established very well in order to guarantee the convergence of the method. Further, the theoretical investigations are confirmed by numerical experiments. Moreover, the present scheme is stable, consistent and gives more accurate solution than existing methods in the literature.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Singularly perturbed problems frequently occur in fluid mechanics, combustion theory, plasma physics, and indifferent day-to-day physical phenomena. Those problems that show a rapid change in its solutions that inherently contains very sharp layers, (see the books in [1, 2]). As those books explain, in singularly perturbed problems, a very small positive parameter called singular perturbation parameter is multiplied to the highest order derivative term and as this parameter goes smaller and smaller, layer occurs. Then the solution shows a much-unexpected change in a very small portion of the domain. In such a small portion, it becomes challenging for numerical methods to capture the solution accurately.
Singularly perturbed parabolic problems are also kinds of singularly perturbed problems that arise in various branches of science and engineering. The well-known examples are the Navier–Stokes equation with large Reynolds number in fluid dynamics, the convective heat transport problems with large Péclet number, and so on. Numerical treatment of the singularly perturbed problems is difficult because of the presence of boundary and/or interior layers in its solution. In particular, classical finite difference or finite element methods fail to yield satisfactory numerical results on uniform meshes and to obtain stability concerning the perturbation parameter, [3,4,5,6,7].
The fitted numerical methods for solving the singularly perturbed problems are widely classified into the fitted operator and fitted mesh methods. In fitted operator methods, exponential fitting parameters will be used to control the rapid growth or decay of the numerical solution in layer regions. Whereas, fitted mesh methods use nonuniform meshes, which will be fine in layer regions and coarse outside the layer regions, [6,7,8,9,10,11]. Thus, many fitted numerical methods developed for different types of singularly perturbed parabolic problems. These different types of problems are occurred depending on whether or not the existence of the convection term, the number of parameters, layer type (boundary and/or interior layers), and the dimension of the problems, linearity, and so on. For the detailed types of the singularly perturbed family of parabolic problems and the developed methods, one can refer to the literature in [12,13,14,15,16,17,18,19] in addition to the formerly listed references.
In the past few decades, few numerical schemes are presented for solving singularly perturbed parabolic convection–diffusion problem types [4,5,6,7,8,9,10,11]. These referred articles may help us just to get prior knowledge about the nature of the solution of these families of problems and where and why the existing methods in problematic to work. Further, it is a recent and active research area in engineering and applied science. Though many classical numerical methods such as finite difference methods, finite element methods, and finite volume methods have been developed so far, most of them fail to give a more accurate solution. This difficulty is due to the presence of perturbation parameter that causes the existence of a boundary layer where the solutions vary rapidly and behave smoothly away from the layer. Owing to the classical numerical methods cannot give a more accurate solution for singularly perturbed parabolic problems, [1, 2], researchers provide attention to formulate methods that may give a more accurate solution.
Recently, researchers in [9, 10], were presented different types of parameter-uniform numerical methods to solve singularly perturbed parabolic problems that exhibiting twin boundary layers. They study the asymptotic behavior of the solution and its partial derivatives. The problem is discretized using the implicit Euler method for time discretization on a uniform and nonuniform mesh with a hybrid scheme for spatial discretization on a generalized Shishkin mesh. The schemes were shown to be uniformly convergent of order one in the time direction and order two in the spatial direction up to a logarithmic factor. Numerical experiments are conducted to validate the theoretical results. Comparison is done with the upwind scheme on a uniform mesh as well as on the standard Shishkin mesh to demonstrate the higher-order accuracy of the proposed scheme on a generalized Shishkin mesh. Also, more recently, researchers in [20,21,22], were provided several novel parameter-uniform higher order numerical methods to solve different types singularly perturbed problems.
Hence, in the past few decades, various numerical schemes are proposed to solve families of these problems, but the obtained results yet not satisfactory for the problem under consideration. Thus, it is necessary to formulate and analyze layer resolving fitted mesh numerical method to produce accurate numerical solutions for the mentioned problem. Therefore, the main aim of this paper is to answer the questions raised related to the accuracy of the solution, and stability and consistency of the method for the singularly perturbed parabolic problem with twin boundary layers.
Statement of the problem
Singularly perturbed parabolic problems are maybe broadly categorized into problems of reaction–diffusion and convection–diffusion types. The convection–diffusion type has also its different types depending on the kind of layers (boundary and/or interior layers). Henceforth, singularly perturbed parabolic convection–diffusion problems are divided into problems exhibiting right or left boundary layer, interior layer, boundary and interior layers. In this work, we proposed a layer resolving fitted numerical scheme for solving the singularly perturbed parabolic of the convection–diffusion type that exhibits twin boundary layers of the problem:
This is subject to the initial and boundary conditions:
Here the solution domain is \(D: = (x_{l} ,\,x_{r} ) \times (0,\,1]\) and \(\varepsilon ,\,\,\,0 < \varepsilon < < 1,\) is the perturbation parameter. Sufficient regularity conditions are imposed on the data’s in Eqs. 1 and 2 that guarantee the smoothness of the solution on the set \(\overline{D}\). Also, assume that Eq. 1 has only one turning point. That is, the coefficient of convection term \(a(x)\) vanishes exactly at one value of \(d = \frac{{x_{l} + x_{r} }}{2}\). For the uniqueness of the solution to Eq. 1, assume that the functions are sufficiently smooth and satisfy the conditions, [10]:
The conditions provided in Eq. 3 are used to indicate the layer regions located both at the ends of the spatial domain. Due to the classical numerical methods cannot give accurate solution for problem under consideration, researchers provide attention to formulate methods that may give a more accurate solution. Hence, the main objective of this paper to present a type of fitted mesh numerical scheme to produce a more accurate numerical solution for singularly perturbed parabolic convection–diffusion problem exhibiting twin boundary layers. Moreover, the detailed lemmas with its proofs of the existence and uniqueness of the solution for the problems defined in Eqs. 1–3 is provided in [10]. Furthermore, to get the existence uniqueness, compatibility and methods, researchers recommended to track the methodology in the works, [31,32,33,34,35,36,37,38].
Formulation of the numerical scheme
To formulate the scheme, we first discretize the temporal variable on uniform mesh and then discretize the spatial one on piecewise uniform Shishkin mesh type. The partition of time interval \([0,T]\) with uniform step size k is given by
Now, using the back Euler approach, we obtain a system of linear differential equations:
Here \(H(x,t_{n} ) = f(x,t_{n} ) - \frac{1}{k}U(x,t_{n - 1} )\). This gives the semi-discretize approximation \(u(x,t_{n} )\) to the exact solution \(u(x,t)\) of Eq. 1 at the time levels \(t_{n} = nk\).
Remarks
-
I.
The estimate of local error in the temporal direction is given by.
$$\left| {E_{n} } \right| \le Ck^{2}$$ -
II.
The estimate of the global error in the direction of time is given by
$$\left\| {E_{n} } \right\| \le Ck,\,\,\forall n$$
Here C is a positive constant free from perturbation parameter and mesh size k.
Consider the solution to Eq. 5 has large gradients in a narrow region near \(x = x_{l}\) and \(x = x_{r}\), then the mesh in this region will be fine and coarse everywhere else. Let \(M\) be a positive integer such that \(M \ge 8\). With this in mind, the transition positive parameter \(\tau\) is chosen to be
Assume that \(\varepsilon \le \frac{1}{M}\), and considering the sub-intervals \([x_{l} ,\,x_{l} + \tau ]\), \([x_{l} + \tau ,\,\,x_{r} - \tau ]\) and \([x_{r} - \tau ,\,\,x_{r} ]\) of the interval \([x_{l} ,\,x_{r} ]\) are subdivided uniformly to contain \(\frac{M}{4},\,\frac{M}{2}\) and \(\frac{M}{4}\) mesh elements. The partition of interval \([x_{l} ,\,x_{r} ]\) is defined by:
The mesh spacing \(h_{m} = x_{m} - x_{m - 1}\) is given by:
Representing this mesh by \(D_{M}^{N}\) and for the rest of the paper, any function \(F(x,t)\) adopt the notation \(F(x_{m} ,t_{n} ) = F_{m}^{n}\). Then, the discretize form of the problem in Eq. 5 on \(D_{M}^{N}\) as:
Here \(\delta_{x}^{2} U_{m}^{n} = \frac{2}{{h_{m} + h_{m + 1} }}\left( {\delta_{x}^{ + } U_{m}^{n} - \delta_{x}^{{^{ - } }} U_{m}^{n} } \right), \ldots \delta_{x}^{ + } U_{m}^{n} = \frac{{U_{m + 1}^{n} - U_{m}^{n} }}{{h_{m + 1} }}\)
To make more clearly, the scheme in Eq. 9 can be re-written in the form:
Here for \(m = 1,\,2,\,...\,\,\frac{M}{2},\,\,\,\)
In addition, for \(m = \frac{M}{2} + 1,\,\,...\,\,M - 1,\,\,\)
Stability and consistency of the scheme
To solve these recurrence relations in Eq. 10, we apply the Thomas algorithm regards to the space direction. Further, the conditions for the discrete invariant imbedding algorithm to be stable, if and only if:
This inequality is strictly satisfied, since \(b_{m} + \frac{1}{k} > \,\,0,\,\,\,\forall m\). Hence, the Thomas Algorithm is stable for the described numerical scheme.
The truncation error \(T\) between the exact solution \(u(x_{m} ,\,t_{n} )\), and the approximate solution \(U_{m}^{n}\) is given by:
Here \(\delta_{x}^{*} U_{m}^{n} = \delta_{x}^{ + } U_{m}^{n} ,\,\,\,m = 1,2,...,\,\frac{M}{2}\), and \(\delta_{x}^{*} U_{m}^{n} = \delta_{x}^{{^{ - } }} U_{m}^{n} ,\,\,\,m = \frac{M}{2} + 1,\,\,...\,\,M - 1.\)
Assume that the higher order derivatives of \(U(x,t)\) exists with respect to the two independent variables and using Taylor’s series expansions, we have:
Substituting Eqs. 13–16 into Eq. 12 yields the estimated truncation error:
From the considered piecewise discretization or from Eq. 8 of the solution domain, assume that.
\(h_{m} = \frac{{4(x_{l} + \tau )}}{M}\) and the value of chosen transition parameter is.
Thus, in the neighborhoods between the inner and outer layer region, we have:
Thus, from Eqs. 17 and 19 the norm of truncation error for the formulated scheme is:
Here the bounded error \(C = \frac{1}{2}\left( {\left\| {a_{m} \frac{{\partial^{2} U_{m}^{n} }}{{\partial x^{2} }}} \right\|_{\infty } + \left\| {\frac{{\partial^{2} U_{m}^{n} }}{{\partial t^{2} }}} \right\|_{\infty } } \right)\) is a constant.
Therefore, the described scheme is almost first-order convergent. From its definition, truncation errors measure how well a finite difference scheme approximates the differential equation. Thus, the method is almost first-order accurate. A finite difference method is consistent if the limit of truncation error is equal to zero as the mesh size goes to zero. Thus, using this consistency and stability criteria provided in Eq. 11, the proposed method is convergent by Lax’s equivalence theorem.
Richardson extrapolation
Richardson extrapolation is that whenever the leading term in the error for an approximation scheme is known. This procedure is a convergence acceleration technique that consists of considering a linear combination of two computed approximations of a solution. The rigorous proof on optimal uniform analysis and also for extrapolation approaches, one cans the mile-stone works in [23,24,25,26,27,28,29,30]. Since, the described numerical scheme is almost second-order convergent as verified in Eq. 20, we have:
Here \(u(x_{m} ,t_{n} )\) and \(U_{m}^{n}\) are exact and approximate solutions, C is a constant independent of mesh sizes \(h_{m} ,\,k\) and perturbation parameter \(\varepsilon\). Let us be the mesh obtained by bisecting each mesh interval and considering Eq. 21 works for any \(h_{m} ,\,k \ne 0\), which implies:
So as to, it works for any \(\frac{{h_{m} }}{2},\frac{k}{2} \ne 0\) yields:
Here the remainders, \(R^{M,N}\) and \(R^{2M,\,2N}\) are \(O(h_{m}^{4} \ln (M) + k^{4} )\).
Reducing the constant C from Eqs. 22 and 23 leads to
Thus suggests that the following value is also an approximation of \(\,u(x_{m} ,t_{n} )\).
Using this approximation to evaluate the truncation error, we obtain:
This is the Richardson extrapolation technique to accelerate the almost first-order convergent to almost second-order convergent method.
Numerical illustrations
In this section, experimental illustrations are conducted on two sample examples to validate the efficiency and applicability of the presented method. In these considered examples a turning point happened at \(x = 0.5\) and \(x = 0\) for Examples 1 and 2, respectively. Further, depending on the sign of the coefficient of convection term regards to the left or right side of a turning point, the exhibits twin boundary layers. Ever since the exact solutions of the considered examples are not known, the double mesh principle is used to estimate the maximum absolute error as:
Here \(U_{m}^{n}\) and \(U_{2m}^{2n}\) are approximate solutions. The numerical rates of convergence evaluated by:
Example 1: Consider the singularly perturbed parabolic problem:
Example 2: Consider the singularly perturbed parabolic problem:
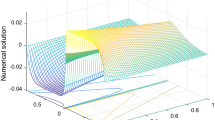
The maximum absolute error and the order of convergence are computed and provided in Tables, corresponding to different values of perturbation and mesh parameters. Fig. 1, demonstrates that the proposed method preserves the layer behaviour of the problem and matches its parabolic shape for the two examples under consideration.

Surface plot of numerical solutions when \(\varepsilon = 2^{ - 10} ,\,\,N = M = 32\) for Examples 1 and 2
Discussions and conclusion
The present method is fitted mesh numerical method based on type of Shishkin meshes for solving singularly perturbed turning point parabolic problems with twin boundary layers. We have recognized the stability and consistency of the formulated scheme to guarantee the convergence of the method. Hence, the convergence analysis established that confirmed using numerical results Tables, which is almost first order convergent and accelerated to almost second-order convergent. Basically, results in Tables shows that the proposed method is fundamentally first order convergent and the error has monotonically decreasing behavior with increasing number of mesh intervals N and M, which approve convergence of proposed scheme. Comparison of numerical results in Table 1 shows that, the present scheme gives more accurate results than the scheme given in results in [10]. Figure 1, indicates the properties and interpretation of numerical solution to support the theoretical descriptions contain about twin boundary layers (See Tables 2, 3 and 4).
Generally, the present method is almost order one and accelerated to order two convergent in both the spatial and temporal variables up to a logarithmic factor, for solving singularly perturbed turning point parabolic problems with twin boundary layers. Further, the method is stable, convergent and gives more accurate solution than some existing methods in literature.
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Miller JJ, O’riordan E, Shishkin GI (1996) Fitted numerical methods for singular perturbation problems: error estimates in the maximum norm for linear problems in one and two dimensions. World Sci. https://doi.org/10.1142/2933
Roos HG, Stynes M, Tobiska L (2008) Robust numerical methods for singularly perturbed differential equations: convection-diffusion-reaction and flow problems. Springer, Berlin
Gowrisankar S, Natesan S (2014) Robust numerical scheme for singularly perturbed convection–diffusion parabolic initial–boundary-value problems on equidistributed grids. Comput Phys Commun 185(7):2008–2019
Bullo T, Duressa GF, Degla G (2021) Accelerated fitted operator finite difference method for singularly perturbed parabolic reaction-diffusion problems. Comput Methods Differ Equat 9(3):886–898
Mekonnen TB, Duressa GF (2020) Computational method for singularly perturbed two-parameter parabolic convection-diffusion problems. Cogent Math Stat 7(1):1829277
Bullo TA, Duressa GF, Degla GA (2021) Robust finite difference method for singularly perturbed two-parameter parabolic convection-diffusion problems. Int J Comput Methods 18(2):2050034
Bullo, T. A., Degla, G. A., & Duressa, G. F. (2021). Parameter-uniform finite difference method for singularly perturbed parabolic problem with two small parameters. International Journal for Computational Methods in Engineering Science and Mechanics, 1–9.
Bullo TA, Degla GA, Duressa GF (2021) Uniformly convergent higher-order finite difference scheme for singularly perturbed parabolic problems with non-smooth data. Journal of Applied Mathematics and Computational Mechanics 20(1):5–16
Mbayi CK, Munyakazi JB, Patidar KC (2021) Layer resolving fitted mesh method for parabolic convection-diffusion problems with a variable diffusion. J Appl Math Comput 23(3):1–26
Yadav S, Rai P (2020) A higher order numerical scheme for singularly perturbed parabolic turning point problems exhibiting twin boundary layers. Appl Math Comput 376:125095
Munyakazi JB, Patidar KC, Sayi MT (2019) A fitted numerical method for parabolic turning point singularly perturbed problems with an interior layer. Num Methods Part Differ Equat 35(6):2407–2422
Woldaregay, M. M., Aniley, W. T., & Duressa, G. F. (2021). Novel Numerical Scheme for Singularly Perturbed Time Delay Convection-Diffusion Equation. Advances in Mathematical Physics, 2021: 1–13
Woldaregay MM, Duressa GF (2021) Accurate numerical scheme for singularly perturbed parabolic delay differential equation. BMC Res Notes 14(1):1–6
Woldaregay MM, Duressa GF (2021) Uniformly convergent numerical scheme for singularly perturbed parabolic delay differential equations. J Appl Math Inform 39:623–641
Woldaregay MM, Duressa GF (2022) Uniformly convergent numerical method for singularly perturbed delay parabolic differential equations arising in computational neuroscience. Kragujevac J Math 46(1):65–84
Woldaregay MM, Duressa GF (2022) Fitted numerical scheme for solving singularly perturbed parabolic delay partial differential equations. Tamkang J Math 53(4):345–362
Kabeto MJ, Duressa GF (2021) Robust numerical method for singularly perturbed semilinear parabolic differential difference equations. Math Comput Simul 188:537–547
Jima KM, File DG (2022) Implicit finite difference scheme for singularly Perturbed Burger-Huxley equations. J Part Differ Equat 35:87–100
Bullo TA, Degla GA, Duressa GF (2021) Fitted mesh method for singularly perturbed parabolic problems with an interior layer. Math Comput Simul 193:371–384
Shiromani R, Shanthi V, Das P (2023) A higher order hybrid-numerical approximation for a class of singularly perturbed two-dimensional convection-diffusion elliptic problem with non-smooth convection and source terms. Comput Math Appl 142:9–30
Saini, S., Das, P., & Kumar, S. (2023). Parameter uniform higher order numerical treatment for singularly perturbed Robin type parabolic reaction diffusion multiple scale problems with large delay in time. Applied Numerical Mathematics.
Saini, S., Das, P., & Kumar, S. (2023). Computational cost reduction for coupled system of multiple scale reaction diffusion problems with mixed type boundary conditions having boundary layers. Revista de la Real Academia de Ciencias Exactas, Físicas y Naturales. Serie A. Matemáticas, 117(2), 66.
Das P (2015) Comparison of a priori and a posteriori meshes for singularly perturbed nonlinear parameterized problems. J Comput Appl Math 290:16–25
Das P (2019) An a posteriori based convergence analysis for a nonlinear singularly perturbed system of delay differential equations on an adaptive mesh. Num Algorithms 81(2):465–487
Kumar K, Podila PC, Das P, Ramos H (2021) A graded mesh refinement approach for boundary layer originated singularly perturbed time-delayed parabolic convection diffusion problems. Math Methods Appl Sci 44(16):12332–12350
Shakti D, Mohapatra J, Das P, Vigo-Aguiar J (2022) A moving mesh refinement based optimal accurate uniformly convergent computational method for a parabolic system of boundary layer originated reaction–diffusion problems with arbitrary small diffusion terms. J Comput Appl Math 404:113167
Das P (2018) A higher order difference method for singularly perturbed parabolic partial differential equations. J Differ Equat Appl 24(3):452–477
Das P, Natesan S (2013) Richardson extrapolation method for singularly perturbed convection-diffusion problems on adaptively generated mesh. CMES Comput Model Eng Sci 90(6):463–485
Chandru M, Das P, Ramos H (2018) Numerical treatment of two-parameter singularly perturbed parabolic convection diffusion problems with non-smooth data. Math Methods Appl Sci 41(14):5359–5387
Chandru M, Prabha T, Das P, Shanthi V (2019) A numerical method for solving boundary and interior layers dominated parabolic problems with discontinuous convection coefficient and source terms. Differ Equat Dynam Syst 27:91–112
Santra S, Mohapatra J, Das P, Choudhuri D (2023) Higher order approximations for fractional order integro-parabolic partial differential equations on an adaptive mesh with error analysis. Comput Math Appl 150:87–101
Srivastava HM, Nain AK, Vats RK, Das P (2023) A theoretical study of the fractional-order p-Laplacian Nonlinear hadamard type turbulent flow models having the Ulam-Hyers stability. Revista de la Real Academia de Ciencias Exactas, Físicas y Naturales Serie A Matemáticas 117(4):160
Das P, Rana S, Ramos H (2022) On the approximate solutions of a class of fractional order nonlinear Volterra integro-differential initial value problems and boundary value problems of first kind and their convergence analysis. J Comput Appl Math 404:113116
Das P, Rana S, Ramos H (2019) Homotopy perturbation method for solving Caputo-type fractional-order Volterra-Fredholm integro-differential equations. Comput Math Methods 1(5):e1047
Das P, Rana S, Ramos H (2020) A perturbation-based approach for solving fractional-order Volterra-Fredholm integro differential equations and its convergence analysis. Int J Comput Math 97(10):1994–2014
Das P, Rana S (2021) Theoretical prospects of fractional order weakly singular Volterra Integro differential equations and their approximations with convergence analysis. Math Methods Appl Sci 44(11):9419–9440
Kusi GR, Habte AH, Bullo TA (2023) Layer resolving numerical scheme for singularly perturbed parabolic convection-diffusion problem with an interior layer. MethodsX 10:101953
Bullo TA (2022) 2022 Accelerated fitted mesh scheme for singularly perturbed turning point boundary value problems. J Math. https://doi.org/10.1155/2022/3767246
Acknowledgements
We would like to thank Jimma University for their material support in testing these methods using MATLAB software and stationary supports
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
TAB: contributed to the conceptualization, investigation, formal analysis, methodology, writing of the original draft and project administration. GRK: contributed to the resources, data management, review and editing of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bullo, T.A., Kusi, G.R. Fitted mesh scheme for singularly perturbed parabolic convection–diffusion problem exhibiting twin boundary layers. Reac Kinet Mech Cat 137, 77–90 (2024). https://doi.org/10.1007/s11144-023-02546-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11144-023-02546-1