
Abstract
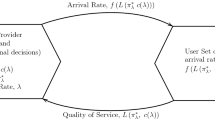
This paper studies optimal pricing for a GI/M/k/N queueing system with several types of customers. An arrival joins the queue if the price of service is not higher than the maximum amount that the arrival is willing to pay, and this maximum amount is defined by the customer type. A system manager chooses a price depending on the number of customers in the system. In addition, the system incurs holding costs when there are customers waiting in the queue for their services. Service times and holding costs do not depend on customer types. The holding costs are nondecreasing and convex with respect to the number of customers in the queue. This paper describes average reward optimal, canonical, bias optimal, and Blackwell optimal policies for this pricing problem.
Similar content being viewed by others

References
Feinberg, E.A., Yang, F.: Optimality of trunk reservation for an M/M/k/N queue with several customer types and holding costs. Probab. Eng. Inf. Sci. 25, 537–560 (2011)
Giloni, A., Koçağa, Y.L., Troy, P.: State dependent pricing policies: differentiating customers through valuations and waiting costs. J. Revenue Pricing Manag. 12, 139–161 (2013)
Miller, B.L.: A queueing reward system with several customer classes. Manag. Sci. 16, 235–245 (1969)
Stidham, S.: Optimal control of admission to a queueing system. IEEE Trans. Autom. Control 30, 705–713 (1985)
Helm, W.E., Waldman, K.-H.: Optimal control of arrivals to multiserver queues in a random environment. J. Appl. Probab. 21, 602–615 (1984)
Feinberg, E.A., Reiman, M.I.: Optimality of randomized trunk reservation. Probab. Eng. Inf. Sci. 8, 483–489 (1994)
Haviv, M., Puterman, M.L.: Bias optimality in controlled queueing systems. J. Appl. Probab. 35, 136–150 (1998)
Lewis, M.E., Ayhan, H., Foley, R.D.: Bias optimality in a queue with admission control. Probab. Eng. Inf. Sci. 13, 309–327 (1999)
Fan-Orzechowski, X., Feinberg, E.A.: Optimality of randomized trunk reservation for a problem with a single constraint. Adv. Appl. Probab. 38, 199–220 (2006)
Fan-Orzechowski, X., Feinberg, E.A.: Optimality of randomized trunk reservation for a problem with multiple constraints. Probab. Eng. Inf. Sci. 21, 189–200 (2007)
Ormeci, E.L., van der Wall, J.: Admission policies for a two class loss system with general interarrival times. Stoch. Models 22, 37–53 (2006)
Low, D.W.: Optimal dynamic pricing policies for an M/M/s queue. Oper. Res. 22, 545–561 (1974)
Low, D.W.: Optimal pricing for an unbounded queue. IBM J. Res. Dev. 18, 290–302 (1974)
Maoui, I., Ayhan, H., Foley, R.D.: Congestion-dependent pricing in a stochastic service system. Adv. Appl. Probab. 39, 898–921 (2007)
Gans, N., Savin, S.: Pricing and capacity rationing for rentals with uncertain durations. Manag. Sci. 53, 390–407 (2007)
Puterman, M.L.: Markov Decision Processes: Discrete Stochastic Dynamic Programming. Wiley, New York (1994)
Dynkin, E.B., Yushkevich, A.A.: Controlled Markov Processes. Springer, New York (1979)
Kallenberg, L.C.M.: Finite state and action MDPs. In: Feinberg, E.A., Shwartz, A. (eds.) Handbook of Markov Decision Processes: Methods and Applications, pp. 21–87. Kluwer Academic Publishers, Boston (2002)
Schweitzer, P.J., Federgruen, A.: The asymptotic behavior of undiscounted value iteration in Markov decision problems. Math. Oper. Res. 2, 360–381 (1977)
White, D.J.: Dynamic programming, Markov chains, and the method of successive approximations. J. Math. Anal. Appl. 6, 373–376 (1963)
Denardo, E.V.: Markov renewal programs with small interest rates. Ann. Math. Stat. 42, 477–496 (1971)
Müller, A., Stoyan, D.: Comparison Methods for Stochastic Models and Risks. Wiley, New York (2002)
Howard, R.: Dynamic Programming and Markov Processes. MIT Press, Cambridge (1960)
Acknowledgments
The research was partially supported by NSF Grant CMMI-1335296.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Proof of Lemma 4.6
(a) We prove statement (a) by contradiction. Assume that there exists some state \(s\in R^f\) such that \(U^f(s,\nabla w_s^f)< \max _{a\in A(s)}\{\alpha ^a[r_a-\nabla w^f_s]\}\). Consider a policy \(g\in F\) such that \(g_n=f_n\) for \(n\ne s\) and \(g_s\) is the action such that \(\alpha ^{g_s}[r_{g_s}-\nabla w^f_s]=\max _{a\in A(s)}\{\alpha ^a[r_a-\nabla w^f_s]\}\). Let \(e_n=\alpha ^{g_n}[r_{g_n}-\nabla w^f_n]-U^f(n,\nabla w^f_n)\) for \(n=0,1,\ldots ,N\). Then \(e_n\) is the same as \(\gamma _n\) in formula (8.39) in [23] and, according to (8.39) in [23],
Observe that \(e_n=0\) for \(n\ne s\) and \(e_s=\alpha ^{g_n}[r_{g_n}-\nabla w^f_n]-U^f(s,\nabla w^f_s)>0\). According to (14), \(v^g-v^f = \sum _{n=0}^N\pi ^g_n e_n = \pi ^g_s e_s\). Since \(s\in R^g\) and \(e_s>0\), \(\pi ^g_s>0\) and, thus, \(v^g-v^f=\pi ^g_s e_s>0\). We have a contradiction. Thus, if \(f\in F^*\), then \(U^f(n,\nabla w^f_n)=\max _{a\in A(n)}\{\alpha ^a[r_a-\nabla w^f_n]\}\) for \(n\in R^f\).
(b) Let \(f\in F^*\) and \(\max _{a=1,2,\ldots ,m}\{\alpha ^a\times r_a\}=M\). Then \(\pi ^f_n>0\) for \(n=0,1,\ldots ,n^f\) and \(v^f=v^*=\sum _{n=0}^{n^f}\pi _n^f R(n, f_n)\). Since \(H_{n}\ge 0\) for \(n=0,1,\ldots ,N\), \(R(n, f_n)=\alpha ^{f_n} [r_{f_n}-H_{n+1}]-(1-\alpha ^{f_n})H_{n}\le M\) for \(n=0,1,\ldots ,n^f-1\) and \(R(n^f,f_{n^f})=0\). Then \(v^f=\sum _{n=0}^{n^f}\pi ^f_n R(n,f_n)=\sum _{n=0}^{n^f-1}\pi ^f_n R(n,f_n)\le \sum _{n=0}^{n^f-1} \pi ^f_n M< \sum _{n=0}^{n^f}\pi ^f_n M= M\). To show \(0<v^*\), consider a policy \(g\in F\) such that \(g_0= m\) and \(g_n= 0\) for \(n=1,2,\ldots ,N\). Then \(\pi ^g_0>0\), \(\alpha ^m=1\), \(H_{0}=H_{1}=0\), and \(R(0,g_0)=\alpha ^{m}[r_m -H_{1}]-(1-\alpha ^m)H_{0}=r_m >0\). Thus, \(v^*\ge v^g=\pi ^g_0 R(0,g_0)>0\).
(c) Since \(f\in F^*\), (6) and Statements (a) and (b) of this lemma imply \(v^f=\alpha ^{f_0}[r_{f_0}-\nabla w_0^f]=\max _{a\in A(0)}\{\alpha ^a [r_a-\nabla w_0^f]\}<\max _{a=1,2,\ldots ,m}\{\alpha ^a\times r_a\}\). In addition, if \(f_0= 0\), then \(v^f=\pi ^f_0 R(0,f_0)=0\), which contradicts statement (b) of this lemma. Thus, \(f_0\ne 0\). Since \(v^f=\alpha ^{f_0}[r_{f_0}-\nabla w_0^f]=\max _{a\in A(0)}\{\alpha ^a [r_a-\nabla w_0^f]\}<\max _{a=1,2,\ldots ,m}\{\alpha ^a\times r_a\}\) and \(f_0\ne 0\), the only possibility is \(\nabla w_0^f>0\). Since \(\nabla w^f_0>0\), \(H_{0}=H_{1}=0\), and \(p(1|1)>0\), (4) implies \(\nabla y_0^f>0\).
(d) Since \(f\in F^*\), \(f^R\in F^*\). Consider a policy \(g\in C^*\). Since \(g\in C^*\), Lemma 4.1 implies \(\nabla y^g_n=u_n\) and \(\nabla w^g_n=z_n\) for \(n=0,1,\ldots ,N-1\). From statement (c) of this lemma, \(n^f>0\) and \(n^g>0\). Consider two cases: (i) \(0<n^g\le n^f\) and (ii) \(0<n^f<n^g\).
(i) Let \(0<n^g\le n^f\). Since \(g\in C^*\), Proposition 4.1 implies \(U^g(n,z_n)=\max _{a\in A(n)}\{\alpha ^a[r_a-z_n]\}\) for \(n=0,1,\ldots ,N\). Let \(e_n=\alpha ^{f^R_n}[r_{f^R_n}-z_n]-U^g(n,z_n)\) for \(n=0,1,\ldots ,N\). Then, \(e_n= \alpha ^{f^R_n}[r_{f^R_n}-z_n]-\max _{a\in A(n)}\{\alpha ^a[r_a-z_n]\}\le 0\) for \(n=0,1,\ldots ,N\). Assume that there exists a state s, \(0\le s\le n^f-1\), such that \(e_s<0\). Observe that \(\pi ^{f^R}_s>0\). According to (14), \(v^{f^R}-v^g=\sum _{n=0}^N\pi ^{f^R}_n e_n=\pi ^{f^R}_s e_s<0\) and \(f^R\) is not optimal. We have a contradiction. Thus, \(e_n=0\) for \(n=0,1,\ldots ,n^f-1\). Moreover, observe that \(n^f\ge n^g\), \(f^R_n=g_n= 0\) and, thus, \(e_n=0\) for \(n=n^f,n^f+1,\ldots ,N\). Since \(e_n=\alpha ^{f^R_n}[r_{f^R_n}-z_n]-U^g(n,z_n)=0\) for all \(n=0,1,\ldots ,N\), by substituting g with \(f^R\) in (6), \(\nabla y^{f^R}_n=u_n\) and \(\nabla w^{f^R}_n=z_n\) for \(n=0,1,\ldots ,N-1\). Since \(\nabla w^{f^R}_n=z_n\) and \(\alpha ^{f^R_n}[r_{f^R_n}-z_n]=U^g(n,z_n)\) for \(n=0,1,\ldots ,N-1\), \(U^{f^R}(n,\nabla w^{f^R}_n) = \alpha ^{f^R_n}[r_{f^R_n}-z_n]= U^g(n,z_n)=\max _{a\in A(n)}\{\alpha ^a[r_a-z_n]\}\) for \(n=0,1,\ldots ,N-1\). According to Proposition 4.1, \(f^R\in C^*\).
(ii) Consider \(0<n^f < n^g\). First, we show that \(U^{f^R}(n,\nabla w_n^{f^R})=U^g(n,z_n)\) for \(n=0,1,\ldots ,n^f-1\). Since \(f^R\in F^*\) and \(g\in C^{*}\), from (6), (7), and statement (a) of this lemma, \(v^{f^R}=U^{f^R}(0,\nabla w_0^{f^R})=\max _{a\in A(0)}\{\alpha ^a[r_a-\nabla w^{f^R}_0]\}= v^g =U^g(0,z_0)=\max _{a\in A(0)}\{\alpha ^a[r_a-z_0]\}\). Assume \(\nabla w^{f^R}_0< z_0\). Since \(f^R_0\ne 0\) and \(g_0\ne 0\), \(\max _{a\in A(0)}\{\alpha ^a[r_a-z_0]\}=U^g(0,z_0)=\alpha ^{g_0}[r_{g_0}-z_0]<\alpha ^{g_0}[r_{g_0}-\nabla w^{f^R}_0]\le \max _{a\in A(0)}\{\alpha ^a[r_a-\nabla w^{f^R}_0]\}\). Similarly, \(v^g>v^{f^R}\) if \(\nabla w^{f^R}_0>z_0\). In either case we have a contradiction. Thus, \(\nabla w^{f^R}_0=z_0\) and (4) implies \(\nabla y^{f^R}_0=u_0\). Since \(f^R\in F^*\) and \(g\in C^*\), from (6), (7), and statement (a) of this lemma, \(v^{f^R}=U^{f^R}(1,\nabla w^{f^R}_1)-H_{1}+p(0|1)\nabla y^{f^R}_0= \max _{a\in A(1)}\{\alpha ^a[r_a-\nabla w^{f^R}_1]\}-H_{1}+p(0|1)\nabla y^{f^R}_0 = v^g= U^g(1,z_1)-H_{1}+p(0|1)u_0= \max _{a\in A(1)}\{\alpha ^a[r_a-z_1]\}-H_{1}+p(0|1)u_0\). Since \(\nabla y^{f^R}_0=u_0\), \(U^{f^R}(1,\nabla w_1^{f^R})=\max _{a\in A(1)}\{\alpha ^a[r_a-\nabla w^{f^R}_1]\} = U^g(1,z_1)=\max _{a\in A(1)}\{\alpha ^a[r_a-z_1]\}\). Because \(f^R_1\ne 0\) and \(g_1\ne 0\), we can use the same arguments for proving \(\nabla w^{f^R}_0 = z_0\) to show that \(\nabla w^{f^R}_1=z_1\). Since \(\nabla y^{f^R}_0=u_0\) and \(\nabla w_1^f=z_1\), (4) implies \(\nabla y^{f^R}_1=u_1\). By repeating the same argument \(n^f-2\) times, \(\nabla y^{f^R}_n = u_n\) and \(\nabla w^{f^R}_n=z_n\) for \(n=0,1,\ldots ,n^f-1\). Then statement (a) of this lemma and Proposition 4.1 imply \(U^{f^R}(n,\nabla w_n^{f^R})=\max _{a\in A(n)}\{\alpha ^a[r_a-\nabla w_n^{f^R}]\}=\max _{a\in A(n)}\{\alpha ^a[r_a-z_n]\}=U^g(n,z_n)\) for \(n=0,1,\ldots ,n^f-1\).
Now we show that \(U^g(n,z_n)=U^{f^R}(n,\nabla w_n^{f^R})\) for \(n=n^f,n^f+1,\ldots ,N-1\). From the proven part of (ii), \(\nabla y^{f^R}_n \nabla y^g_n= u_n\) for \(n=0,1,\ldots ,n^f-1\). Then, according to (6) and (7), \(v^{f^R} = -H_{n^f} + \sum _{j=0}^{n^f-1}p(j|n^f) [\sum _{i=j}^{n^f-1} u_i] = v^g = \alpha ^{g_{n^f}}[r_{g_{n^f}}-z_{n^f}]- H_{n^f} + \sum _{j=0}^{n^f-1}p(j|n^f) [\sum _{i=j}^{n^f-1}u_i]=\max _{a\in A(n^f)}\{\alpha ^a [r_a- z_{n^f}]\} - H_{n^f} + \sum _{j=0}^{n^f-1}p(j|n^f) [\sum _{i=j}^{n^f-1}u_i]\). Thus, \(\alpha ^{g_{n^f}}[r_{g_{n^f}}-z_{n^f}]= \max _{a\in A(n^f)}\{\alpha ^a[r_a-z_{n^f}]\}=0\). Note that \(n^f<n^g\) and \(g_{n^f}\ne 0\). Because \(\alpha ^{g_{n^f}}[r_{g_{n^f}}-z_{n^f}]=\max _{a\in A(n^f)}\{\alpha ^a[r_a-z_{n^f}]\}=0\) and \(g_{n^f}\ne 0\), the only solution is \(g_{n^f}=1\) and \(r_{g_{n^f}}=z_{n^f}= r_1\). In addition, since \(z_{n^f}= r_1\), (10) implies \(z_n\ge r_1\) for \(n=n^f+1,n^f+2,\ldots ,N-1\) and Proposition 4.1 implies \(U^g(n,z_n)=\max _{a\in A(n)}\{\alpha ^a[r_a-z_n]\}=0\) for \(n=n^f+1, n^f+2,\ldots ,N\). Since \(f^R_n=0\) for \(n=n^f,n^f+1,\ldots ,N\), \(U^g(n,z_n)=U^{f^R}(n,\nabla w_n^{f^R})=0\) for \(n=n^f,n^f+1,\ldots ,N\).
Thus, \(U^{f^R}(n,\nabla w_n^{f^R})=U^g(n,z_n)\) for \(n=0,1,\ldots ,N\). Observe that \(v^{f^R}=v^g=v^*\). By solving (6) for both policies \(f^R\) and g, \(\nabla y_n^{f^R}=u_n\) for \(n=0,1,\ldots ,N-1\). According to (4), \(\nabla w_n^{f^R}=z_n\) for \(n=0,1,\ldots ,N-1\). Then \(U^{f^R}(n,\nabla w_n^{f^R})=U^{f^R}(n, z_n)=U^g(n,z_n)=\max _{a\in A(n)}\{\alpha ^a[r_a-z_n]\}\) for \(n=0,1,\ldots ,N\). Proposition 4.1 implies \(f^R\in C^*\). \(\square \)
Rights and permissions
About this article

Cite this article
Feinberg, E.A., Yang, F. Optimal pricing for a GI/M/k/N queue with several customer types and holding costs. Queueing Syst 82, 103–120 (2016). https://doi.org/10.1007/s11134-015-9457-7
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11134-015-9457-7
Keywords
- Optimal pricing
- Queueing system
- Markov decision process
- Average reward optimality
- Bias optimality
- Blackwell optimality