
Abstract
Demand-responsive transit systems are seen as a solution to improve the level of service and decrease the costs of providing transit to rural or low-demand areas. There are great expectations on the impact that driverless demand-responsive transit (DDRT) systems can have on a regional setting. Nevertheless, the application of DDRT in such type of setting has not been widely studied, in particular for scenarios where the system is an addition to the existing alternatives (as characteristic of the early diffusion stage of an innovation). This study provides an assessment of the early-stage operation of a regional DDRT system used by a small portion of the entire potential adopters. A methodological approach is built upon an agent-based model through which the daily operation of a DDRT system is simulated in detail. This approach is applied to a case study in Portugal considering scenarios varying in terms of several operational parameters, adoption rates (from 1 to 20%), and types of services (private versus shared rides). Results show that each vehicle in the DDRT system with shared rides could replace up to 13 private vehicles with a decrease in the vehicle-kilometers traveled of 1%. The DDRT system operation is profitable even with low adoption rates (starting from 2% for the system with shared rides). When considering the adoption rate of 5%, the system with shared rides is 54% more profitable than the one with private rides, but, from the perspective of travelers, shared rides lead to longer waiting times and detours.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The interest in services based on automated vehicles (AV) is growing fast alongside the technological advances achieved in recent years. Vehicles that drive themselves automatically are already a reality in specific geofenced locations. For example, Waymo operates a 24/7 service with self-driving vehicles in certain areas of San Francisco, California, and Phoenix, Arizona (Waymo 2022). Over the last decade, research works have been conducted to investigate the impacts of AVs, notably the ones able to self-drive in all environments (level-5 according to SAE International 2021). Vehicles with this level of technology are also referred to as fully automated, autonomous, or driverless vehicles. Such vehicles are expected to decrease private vehicle ownership due to the emergence of more affordable and convenient shared mobility solutions (Gurumurthy and Kockelman 2018; Martin and Shaheen 2011; Sabouri et al. 2020).
Transport systems using driverless vehicles to serve on-demand requests, henceforward designated by driverless demand-responsive transit system (DDRT), will have substantially lower operating costs when compared to traditional systems based on human-driven vehicles, and can play an important role in both urban and regional settings. In urban areas, it is expected that high demands contribute to making such systems profitable. Instead, in regional settings (especially in low-demand areas), this may not be the case, but profit probably is not a proper measure of their success since the main challenge is to provide a quality alternative to the private car (Bernhart et al. 2018).
The fares associated with DDRT services may have a substantial impact on the adoption rate (Liu et al. 2017). These services will only be competitive with private vehicles if the ownership costs of the latter are taken into account (Bösch et al. 2018), since the expected service fares will probably exceed the direct (out of pocket) costs of using a private vehicle. Studies have shown that other factors might also impact the adoption of DDRT services, such as their environmental-friendliness and increased in-vehicle productivity (Acheampong & Cugurullo 2019; Haboucha et al. 2017; Yap et al. 2016).
The assessment of DDRT systems and their operational issues has been performed through simulation approaches, particularly using agent-based modeling and simulation (ABMS) (Narayanan et al. 2020). This approach “enables a more realistic modeling of complex systems, since the dynamics and the interaction between the different entities (agents) and their environment (transport network) can be explicitly expressed” (Franco et al. 2020). The main agents to account for when modeling DDRT systems are vehicles and travelers. Additionally, system operators are often considered as agents (e.g., Martinez & Viegas 2017). Modeling the interactions between these agents involves processes ranging from logic-based rules to complex optimization algorithms. For example, Hyland & Mahmassani (2018) compared simplistic first-come first-serve rules (sequential assignment) with optimization models that minimize the overall distance between travelers and assigned vehicles (simultaneous assignment).
Previous applications of agent-based models (ABM) to DDRT systems have focused mostly on urban areas. Schlüter et al. (2020) and Sieber et al. (2020) have instead used them to assess such systems in regional settings, showing the benefits of replacing all current mobility alternatives with driverless services. The replacement of all mobility alternatives by a DDRT system is an interesting way to analyze the system’s potential, though it will certainly take a long time to materialize. According to the S-curve of innovation (Rogers 2003), the diffusion of a new technology, in this case the driverless vehicle, is slow at first. Therefore, the expectation is that DDRT services will be initially offered as an addition to the existing alternatives rather than to fully replace them. Research works on the early-stage operation (i.e., when the adoption is low) of regional DDRT services are rare, although Santos & Correia (2021) have shown, using a flow-based integer programming approach, that regional DDRT systems can be unprofitable, especially when considering low adoption rates.
This study aims to contribute to the scarce body of literature available today on regional DDRT systems by tackling the early-stage operation of these systems with a great level of detail. For this purpose, we assess the daily operation of different DDRT scenarios characterized by low adoption rates. This is done by using a methodological approach based on an ABM in a case study involving the Region of Coimbra (Portugal). The ABM considers travelers, vehicles, and the system operator as agents. It replicates, in detail, the operation of the DDRT system, including vehicle charging and relocation, for multiple days. The demand for each scenario is generated prior to the simulation, being independent of the service characteristics (traveler’s mode choice is not modeled). To account for demand variations, scenarios with different adoption rates are analyzed. In addition, the scenarios vary according to the type of service (private or shared) provided by the DDRT system and several of its operational parameters. The evaluation of the scenarios is based on a number of key performance indicators (KPIs), chosen to reflect the perspectives of travelers and of the system operator, and generated from the travel and vehicle records obtained during the simulation. Examples of these KPIs are the average waiting time, the average vehicle occupancy, the fleet size, and the total profit. To the best of our knowledge, this study is the first to assess and compare in detail different DDRT scenarios for an early-stage operation in a regional setting using ABMS.
The methodological approach developed in this paper can be used by regulators and operators to assess the viability of operating a DDRT in regional environments. For regulators, the findings, especially profit and service levels, can be used to establish policies, such as whether it is necessary to provide subsidies for the operator and which service characteristics must be required so that travelers are served properly. For operators, the main aspects to consider are the economic viability of the operation (profit margin) and the operational requirements, such as the fleet size.
The paper is organized as follows. The next section (Sect. "System description") provides a description of the system under study. Sect. "Methodological approach" presents an overview of the methodological approach and detailed descriptions of its components: the demand generation process, the agent-based model, and the KPIs. In Sect. "Case study", the case study and the DDRT scenarios are described. The results for the case study under the different scenarios are reported and discussed in Sect. "Results and discussion". Finally, Sect. "Conclusion" summarizes the study and its conclusions, and identifies directions for future research.
System description
The DDRT system considered in this study operates in a region divided into zones connected by an uncongested road network and relies on a homogeneous vehicle fleet. It serves a low percentage of the interzonal trips performed in the region. Intra-zone trips are not considered, being this demand satisfied by other travel modes (e.g., private vehicles, walking, cycling). The system is managed by a central operator with profit objectives. Two types of services are offered to travelers: private rides (trip requests are served individually) and shared rides (more than one trip request can be served by the same vehicle).
The fleet used in the DDRT system is composed by vehicles of the same electric-powered driverless model. The vehicle model is characterized by: a seat capacity (\({V}_{s}\)); a battery capacity (\({V}_{b}\)); an energy consumption rate (\({V}_{c}\)); a fixed cost per day (\({V}_{d}\)) related to vehicle depreciation, maintenance, annual tax, insurance, and cleaning; and a variable cost per kilometer traveled (\({V}_{v}\)) related to energy charging. Vehicles can refuel at charging stations located at zone centroids. The charging stations offer a number of identical charging sockets (high enough to accommodate the maximum vehicle charging demand at a certain time and zone) where a vehicle can plug-in to charge without human assistance.
The central operator of the DDRT system controls the fleet movements, collects trip requests, and assigns them to vehicles within time intervals of a given length, designated by inter-assignment intervals. Trip requests are characterized by the request time, the pick-up and drop-off locations, and the number of travelers to be served, which can be equal to one or higher (e.g., when family members travel together). In case the type of service enabled to the user is shared rides, the operator matches the requests received that can be served simultaneously without violating a set of conditions (e.g., the vehicle seat capacity and the maximum increase in the expected time of arrival of travelers). Figure 1 illustrates how trip requests are served by the DDRT system with private and shared rides. The operator relocates vehicles based on the supply (available vehicles) and demand (current and expected trip requests) in the different zones of the region. The objective of these relocations is to reduce the waiting time of travelers and ensure a minimum vehicle supply in each zone, while spending the least possible vehicle energy.

Types of services provided by the DDRT system
Methodological approach
In this section, we first present an overview of the methodological approach developed in this study to assess the operation of a regional DDRT system and then provide details on the three stages it entails.
Overview
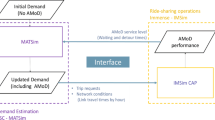
An overview of the methodological approach is outlined in Fig. 2. The first of its three stages is a demand generation process, where trip requests are created for each simulation day. The second stage relies on an ABM to perform the simulation of the DDRT system’s operations. At first, a warm-up day is simulated to determine the fleet size and the initial vehicle positions. Then, consecutive operation days are simulated to retrieve the travel and vehicle records. In the third stage, KPIs are computed and analyzed.

Overview of the methodological approach
The demand generation process creates travelers that can travel individually or accompanied. Groups of travelers are formed to mimic private car trips (which are often shared by members of the same family, work colleagues, etc.). Each group contains a leader responsible for requesting the trip. This process uses the daily OD matrix, the hourly distribution of trips, and the distribution of vehicle occupancy rates per origin zone to generate trip requests.
The ABM comprises three types of agents: the system operator, travelers and vehicles. The simulation environment, where the agents interact, is built upon the road network and the territorial limits of the zones in the region under study. The ABM includes rules to simulate the vehicle movements (to pick-up and drop-off travelers, to reach charging stations, and to relocate to zones where they are or may be needed), embedded in an assignment algorithm and a relocation strategy. The assignment algorithm determines how trip requests and vehicles are matched. The relocation strategy specifies an efficient redistribution of vehicles (from zones where supply exceeds demand to zones where demand exceeds supply), considering vehicle locations and trip requests (including forecasts). The energy spent by vehicles while moving is taken into account and the time they spend charging is calculated based on both the vehicle battery state-of-charge (SOC) and the charging power associated to the charging station.
The final stage of the proposed methodological approach is the computation of the KPIs using simulation output data. The output data provides detailed records about travel and vehicle operations for each simulation day. The chosen KPIs characterize the experience of both operator and travelers of the DDRT system, as well as the main differences from the current situation (business as usual).
Demand generation process
The demand for the DDRT system is generated through a three-step process (Fig. 3) using information generally available in travel surveys. First, travelers are created based on the daily interzonal OD matrix, that is, a traveler is created for each trip registered in the matrix. Second, groups of travelers are defined by aggregating from one to four travelers considering the distribution of vehicle occupancy rates per origin zone. Each traveler group makes one trip request, with characteristics defined in the last step. These characteristics are: the specific origin and destination locations (OD coordinates); the departure time; the number of travelers; and the group leader. The group leader is the traveler responsible for the trip request.

Demand generation process
The process to define departure times for the trip requests consists of two phases. In the first, the hours of departure are set according to the hourly distribution of trips in the region. Then, in the second phase we use time discretization to create a finite number of opportunities (n) for groups to request a trip within each hour. The exact minute of departure is defined by assuming that the interval between each opportunity, in minutes, is equal to 60/n, and that the first trip request occurs at minute 0. For example, if the number of departure opportunities per hour is set as 2, the departures would be at minute 0 or 30. The number of groups departing within a certain hour (hourly trip requests) are uniformly distributed between these departure opportunities. Figure 4 shows the distribution of 40, 100, and 60 hourly trip requests between 7:00 and 9:59 h across the respective departure times, considering two departure opportunities per hour (n = 2).

Example of time distribution of trip requests for two departure opportunities per hour
Agent-based model
The ABM is developed to simulate the interaction between the system operator, travelers, and vehicles in a controlled environment where space and time are discretized. Rules are established for each agent depending on the two main simulation contexts: warm-up day and operation days. The warm-up day is used to establish the fleet size and initial vehicle positions. The outputs of the warm-up day are used as inputs for the operation days, where the data needed to compute the KPIs are generated.
During the warm-up day, vehicles are created guaranteeing that no traveler waits more than a given maximum waiting time (\({WT}_{max}\)). This approach is similar to the ones adopted by Fagnant & Kockelman (2018), Farhan & Chen (2018), and Zhang & Guhathakurta (2021). The rules to create vehicles during the warm-up day are included in the assignment algorithm. This algorithm, also used to assign trip requests for every inter-assignment interval (\(I\)), is illustrated in Fig. 5. It starts by defining a set of conditions to evaluate whether a vehicle is suitable to be assigned to a certain trip request. These conditions are different depending on the type of service considered (private or shared ride). For the private ride service, a vehicle can only be assigned to a trip if the time elapsed between the reception of the trip request and the expected pick-up at the origin would not exceed the \({WT}_{max}\). For the shared ride service, another condition is added to this one. This additional condition, applied when assigned vehicles with empty seats are available (i.e., vehicles that are already assigned to at least one traveler group but still have empty seats), imposes that a vehicle search is made firstly within this set of vehicles to select the ones that: (1) have enough empty seats to accommodate the traveler group that requested the trip, and (2) can serve the trip request without delaying the expected time of arrival (\(ETA\)) of the traveler groups (both the ones already assigned to the vehicle and the one that is waiting to be assigned) by more than a maximum value (\({D}_{max}\)). The \(ETA\) refers to the approximate time that travelers are expected to arrive at their destinations if served in private rides. When two or more suitable vehicles are found, the trip request is assigned to the one that can serve it faster. If no suitable vehicle is available and the time elapsed from the reception of the trip request exceeds \({WT}_{max}\), a new vehicle is created to serve that request.

Vehicle assignment algorithm flowchart
At the end of the warm-up day, the underused vehicles are eliminated, and the fleet size is defined. Vehicles are considered underused if two conditions are simultaneously met: (1) they are parked, and (2) the percentage of parked time during the warm-up day is higher than a pre-defined maximum value (\({P}_{max}\)).
A similar version of the assignment algorithm, described above, is used for the operation days. In this case, the number of vehicles in the fleet is fixed, and therefore new vehicles cannot be added. As a result, the suitability of a vehicle to serve a certain trip request is not dependent on the time elapsed since the request was made. Instead, trip requests are assigned to the vehicles that can quickly reach the origins. The additional condition previously described for the shared ride service is still applied to evaluate the suitability of assigned vehicles with empty seats.
During the simulation of both warm-up and operation days, travelers and vehicles behave according to the statecharts in Fig. 6. The possible states for travelers are “making a trip request”, “waiting for assignment”, “waiting for pick-up”, and “moving to destination”. Travelers go through these states as the events represented by the arrows of the traveler statechart take place (Fig. 6). The leaders of the traveler groups are responsible for checking these conditions while the other travelers in the group simply imitate the leader. For example, all travelers of the same group enter the state “waiting for pick up” as soon as the group leader is notified that the trip request is assigned to a vehicle. As for the vehicles, the possible states are “idle”, “moving to pick-up”, “moving to drop-off”, “moving to charging station”, “charging”, and “relocating”. Each state corresponds to a different type of vehicle operation. Vehicles go through these states as the commands sent by the operator (represented by the arrows in the vehicle statechart of Fig. 6) are received. After being idle for more than a certain amount of time (\({P}_{min}\)), vehicles park at their current locations.

Traveler and vehicle statecharts
Vehicles are associated with a battery capacity, \({V}_{b}\), that defines, in kWh, the electric energy that can be stored. Every time a vehicle moves, its battery SOC is updated using the average energy consumption rate, \({V}_{c}\), which expresses, in kWh/km, the electric energy spent while moving. Vehicles can start charging on two occasions: (1) after a trip or a relocation operation, if the vehicle battery is below a certain level (\({SOC}_{m}\)); or (2) if the vehicle is parked and receives an order from the operator (see the operator conditions below). Since the charging stations are located at the centroids of the transport zones, the vehicle moves to the closest centroid before it starts charging. The duration of the charging operation depends on the charging power (\({C}_{power})\), in kW, available at the charging station, which is assumed to be constant and independent of the battery SOC.
Assignment of vehicles to shared rides is possible when they are idle or when they are charging and their battery level exceeds a minimum SOC (\({SOC}_{c}\)). For private rides, also vehicles relocating or moving to drop-off can be assigned. After being assigned, vehicles that were idle or charging can start moving to pick-up travelers, while vehicles that were relocating or moving to drop-off must finish their current tasks first. Each vehicle has a list of origins and destinations that is used to guide its movements. The list is organized based on the first-in-first-out (FIFO) principle. When assigned to more than one trip request, a vehicle stays in the states “moving to pick-up” and “moving to drop-off” until all origins and destinations in the list are visited, respectively.
The system operator checks the status of the vehicles every minute to account for: (1) moving vehicles that arrived at the destination, and (2) charging vehicles that reached a full charge state. At each inter-assessment interval (\(\delta\)), the operator lists the parked vehicles which can receive a command to relocate or to start charging if the battery is below a certain level (\({SOC}_{p}\)). For relocations, the strategy adopted in the model is based on Dandl et al. (2019) and Zhang et al. (2015). This relocation strategy consists of three steps:
-
1.
Compute a balance value for each zone, i.e., the difference between the expected demand and the available supply. The expected demand is the sum of the trip requests currently waiting to be assigned with the forecasted demand for a pre-defined horizon (\(h\)). The hourly distribution of trips per origin is used to forecast the demand. The available supply is the number of vehicles that can reach the centroid of the zone within the \({WT}_{max}\) set for travelers.
-
2.
List the zones that require more vehicles than the available supply. This list is composed of zones with positive balance values (in need for more vehicles) and of zones with no available supply (to guarantee that at least one vehicle will be nearby in case a trip is requested, even if the request is not expected).
-
3.
Send the nearest idle vehicles to the centroid of each zone in the list. The number of vehicles to send depends on the balance values. For example, the operator will send the 4 nearest idle vehicles to a zone with a balance value of 4. For zones with no available supply, only one vehicle will be sent.
Whenever an agent (traveler or vehicle) enters a new state, the information relatively to its geographical location, the time instant, and the current state in the respective statechart is recorded in the database. For vehicles, the data recorded after each movement is finished includes the identification of travelers served, the vehicle-kilometers traveled (VKT), and the battery SOC.
Key performance indicators
The system operation is assessed based on a set of KPIs that can be computed using the data recorded during the simulation. Table 1 shows the KPIs chosen to evaluate the DDRT system from the perspective of operator and travelers, and to make comparisons with the current situation. The operator KPIs summarize the activity of the DDRT system and its financial aspects, while the traveler KPIs summarize the passengers’ experience while using the system. Finally, the KPIs chosen to make comparisons with the current situation account for the differences between the DDRT system and a hypothetical scenario (current situation) where we assume the demand is served only by conventional private vehicles.
Within the operator KPIs, the ones related to the activity of the system are the fleet size; the total daily trip requests; the daily trip requests per vehicle (i.e., the ratio between the total daily trip requests and the fleet size); the daily number of operations per type (daily number of charging operations and daily number of relocations); the average time a vehicle spent daily per operation (average time a vehicle spent daily charging and average time a vehicle spent daily moving to a charging station); the daily VKT by all vehicles in the system in total (total VKT) and per operation type (total daily VKT moving to drop-off, total daily VKT moving to pick-up, total daily VKT relocating, and total daily VKT moving to a charging station); and the average daily VKT by one vehicle per operation (average VKT per movement to pick-up, average VKT per movement to drop-off, and average VKT per relocation) and per trip request (average VKT per trip request). The last one is calculated by dividing the total daily VKT by the total daily trip requests. The financial aspects of the system are the total profit, revenues, and costs (estimated per day). The total profit is computed as the balance between the total revenues and costs. The total revenues are obtained from a fare charged per trip request that depends on the number of travelers and on the distances between trip origins and destinations. The total costs are computed as the sum of two components: the fixed costs that depend on the fleet and the variable costs that also depend on the distances traveled.
The experience of travelers in the DDRT system is evaluated using five KPIs. The first traveler KPI represents the percentage of trip requests that are served in shared rides. The second and the third ones are related to the time a traveler waits after sending the trip request until the arrival of the assigned vehicle at the traveler’s origin. These KPIs correspond to the average time a traveler waits (average waiting time) and the percentage of travelers that wait less than the \({WT}_{max}\) (travelers served within the \({WT}_{max}\)). The fourth one is the average number of seats that are occupied during a trip (average vehicle occupancy). Finally, the fifth one is the average ETA delay, which is computed as the average difference between the time a traveler on a shared ride arrived at the destination and the ETA estimated for a private ride.
The system is compared with the current situation based on two KPIs: the private vehicle replacement rate, which is the number of conventional private vehicles that one driverless vehicle can replace; and the variation in the VKT. The number of vehicles required to serve the demand and the VKT for the current situation are estimated based on the assumption that the users of the DDRT system would perform the same trips using their conventional private vehicles. The number of vehicles required to transport the traveler groups in their interzonal trips is calculated by dividing the number of trip requests by the average number of trips per person per day in the region under study. The VKT for the current situation is equal to the sum of distances between the origins and destinations of the traveler groups’ trips.
Case study
The methodological approach described previously is applied to the Region of Coimbra, in central Portugal, to assess the early-stage operation of a DDRT system. This region comprises 19 municipalities, occupies an area of 4336 km2 (IGP 2020), and is home to a population of approximately 430,000 (INE 2021). According to INE (2011), around 51% of this population lives in areas predominantly urban, and 31% live in Coimbra, the main municipality of the region. The remaining population is divided between areas moderately urban (22%) and areas predominantly rural (27%). The western side of the region, where the main urban centers are located, is rather flat. In contrast, the eastern side is hilly or mountainous and predominantly rural.
Detailed information about the network and demand data, the operational parameters, and the scenarios considered in the case study is provided below in separate subsections.
Network and demand data
The transport zones and the travel demand data are retrieved from the most complete mobility survey currently available for the region, the Metro Mondego Mobility Survey (TIS.pt 2009). This survey divides the municipalities of the region into 137 zones, as shown in Fig. 7, and describes their mobility patterns based on more than 13,000 interviews. According to the survey, the average number of daily trips per person in the region is 2.2 and roughly 400,000 motorized trips are performed daily between the defined zones, 81% of which are made using a private transport mode. A list of municipalities with their populations (INE 2021), number of zones and private transport interzonal trips (TIS.pt 2009) is shown in Table 2, and the hourly distribution of these trips is shown in Fig. 8.

Case study region and transport zoning

Hourly distribution of private transport interzonal trips inside the Region of Coimbra
Different demand scenarios are considered assuming distinct DDRT service adoption rates. To obtain the trip requests per zone for each demand scenario, the adoption rate is multiplied by the daily OD matrix of the private transport trips between the zones. For each group of travelers, the group leader is randomly chosen among the ones in the group and the departure time is defined considering six departure opportunities to request a trip within each hour. Since traffic congestion is not significant in the region, we assume that travel speeds remain constant throughout the day. An average travel speed of 60 km/h is defined for the vehicle movements in the system. This speed is estimated based on 100 experiments of randomly-generated traveler trip requests between zones. For each experiment, the average speed is calculated using travel times and distances from Open Street Map (OSM 2014).
Operational parameters
The default values set for the operational parameters related to the DDRT system design and operation are shown in Table 3.
We consider that the DDRT system uses a fleet of identical 4-seat automated electric vehicles (\({V}_{s}=4 seats\)), with an energy consumption rate, \({V}_{c}\), of 0.20 kWh/km and a battery capacity, \({V}_{b}\), of 100 kWh. These values are compatible with the current electric vehicles available in the market, which have energy consumption rates varying from 0.10 kWh/km to 0.30 kWh/km, and battery storage capacities as high as 107 kWh (Mobility House 2021). The usage of each vehicle is associated with a daily fixed cost, \({V}_{d}\), of 20 EUR/day, which includes depreciation, maintenance, annual tax, insurance, and cleaning; and a variable cost, \({V}_{v}\), of 0.04 EUR/km for energy, corresponding to the multiplication of the energy consumption rate (0.20 kWh/km) by the energy cost of 0.20 EUR/kWh. These costs are the same used by Santos & Correia (2021) for a recent Renault Zoe model and the kWh price practiced by a Portuguese electric energy provider (Selectra 2022).
The fleet size is defined during the warm-up day by considering a \({WT}_{max}\) of 15 min, a \({P}_{min}\) of 30 min, and a \({P}_{max}\) of 80%. Vehicles are assumed to charge on the 50 kW chargers (\({C}_{power}=50 kW\)) available at zone centroids. This is the same charging power provided in the existing fast charging points in Portugal (Galp 2022). To initiate a charging operation, the SOC of vehicles has to be below 20% after movement (\({SOC}_{m}=20\%\)) or below 80% while parked (\({SOC}_{p}=80\%\)). The minimum SOC required for a vehicle to be available for assignment while charging is set to 50% (\({SOC}_{c}=50\%\)). The fare charged per traveler, \(f\), is 0.10 EUR/km. This fare is similar to the one currently charged by the bus services available in the region (Transdev 2022). By default, the parameters \(I\), \({D}_{max}\), δ, and \(h\) are set as 2, 10, 10, and 30 min, respectively.
Scenarios
We analyze the operation of the DDRT system referring to scenarios defined in terms of type of service, adoption rate, and operational parameters. Two types of services are assessed: private and shared rides. In the shared ride service, the operator tries to match trip requests that can be served simultaneously by the same vehicle, while, in the private ride service, trip requests are served privately. The tested adoption rates vary from 1 to 20%. As for the operational parameters, we evaluate the impact of different \(I\), \({D}_{max}\), \({WT}_{max}\), and \({P}_{max}\).
The reference scenario corresponds to the shared ride type of service, the adoption rate of 5%, and the following values for operational parameters: \(I=2\) minutes, \({D}_{max}=10\) minutes, \({WT}_{max}=15 \;\mathrm{minutes},\;\mathrm{and}\;{P}_{max}=80\%\) (Table 4). An additional scenario is generated for each alternative input value (only one input changes from scenario to scenario) leading to a total of 14 scenarios. The operation of the DDRT system in each scenario is evaluated for five operation days, in addition to the warm-up day.
Results and discussion
The results obtained by applying the methodological approach to the case study are presented and discussed in this section. First, we focus on the reference scenario and later we compare its results with those of the alternative scenarios.
The ABM model used within the approach was coded in the Anylogic simulation software (Borshchev 2013). The code was implemented with animations to facilitate the development and validation process. A video of a simulation run with animations is provided as supplementary material in Online Resource 1. These animations can be disabled to decrease computational time. Each simulation run (including the warm-up day plus five operation days) performed without any animations in a 64-bit Windows 10 operating system with 16-GB RAM and i7 CPU took less than 10 min.
Reference scenario
The assessment of the reference scenario is based on the average results obtained over the five operation days, as well as on the variability observed across these days. This assessment aims to shed light on the experience of travelers in using the system and of the operator in managing a fleet of 528 vehicles. This fleet size is the difference between the 602 vehicles generated and the 74 underused vehicles eliminated at the end of the warm-up day simulation.
Average results
On average, approximately 11,800 trip requests are received during an operation day and nearly 80% of the travelers that request a trip share their rides with others besides their own group members (Table 5). The DDRT system operator has a total profit of 6,255 EUR/day on average, with total revenues and costs of 24,907 EUR/day and 18,652 EUR/day, respectively. The average vehicle occupancy is 2.4, therefore a traveler usually shares a ride with at least one person. The delay on the \(ETA\) for most travelers (more than 70%) is less than 5 min (Fig. 9), against the \({D}_{max}\) of 10 min allowed. As for the waiting times, the average is 9 min, and over 70% of travelers wait less than this time. Nevertheless, about 15% of travelers wait for more than the \({WT}_{max}\) of 15 min. These long waiting times can be avoided or reduced by enabling travelers to pre-book (Scheltes & Correia, 2017).

Cumulative distribution function of waiting times
Observing the average hourly distribution of vehicles (Fig. 10), it is clear that more than 50% of the vehicles remain idle during most of the day. This behavior could be expected due to the commonly non-uniform distribution of trips per hour (see, for example, Oh et al. 2020; Santos & Correia, 2021). The remaining part of the day is spent mostly moving to pick-up and moving to drop-off. Between 8:00 and 20:00 h, at least 20% of the vehicles are moving to pick-up or moving to drop-off. On average, each vehicle serves 22 trip requests per day, each trip involving a 31 km drive (9 km moving to pick-up and 22 km moving to drop-off). The total VKT moving to pick-up and moving to drop-off are 97% of the total VKT. The other 3% occur in movements to charging stations (2%) and in vehicle relocations (1%). The system operator commands 52 relocations per day (a very low value considering the 11,000 trip requests served), being 23 km the average VKT per relocation. These relocations are performed mainly within the eastern side, in hilly and mountainous areas where circulation is more difficult and the number of travelers is lower (Fig. 11).

Hourly distribution of vehicles per state

Number of relocations per zone of origin (left) and destination (right)
The highest percentages of vehicles charging are generally observed after the demand peak hours, i.e., between 10:00 and 13:00 h and between 19:00 and 23:00 h (Fig. 10). The average SOC of vehicle batteries during the operation days remains between 71 and 85%, with the minimum SOC reaching 25% (Fig. 12). Vehicles spend per day, on average, 7 min driving towards a charging station and 76 min charging. Figure 13 shows the cumulative distribution of charging operations per zone per day. There is at least one charging operation in each zone per day. However, around 55% of such operations take place in one of the 25% most used zones. These most used zones are spread across the region and hold between 11 and 50 charging operation per day.

Average and minimum battery SOC of vehicles per hour

Cumulative distribution of charging operations per zone per day
Variability of results
As expected, the hourly distribution of trip requests and the spatial distribution of travelers vary across the five operation days (Figs. 14 and 15), despite the daily demand per zone being the same for the five operation days (the demand generation process is fed by the same daily OD matrix).

Spatial distribution of travelers in the operation days

Hourly distributions of trip requests in the operation days
The DDRT system is able to adapt to the varying hourly demands, as attested by the small variation of traveler and operator KPIs across the operation days. Indeed, as shown in Table 6, the maximum variation in the average waiting time is 1 min and at least 85% of the travelers are served within the \({WT}_{max}\) in the operation days. For the operator, the system operation is profitable on all operation days, with a variation of around 200 EUR, and the maximum variation in the total VKT of about 6000 km.
Alternative scenarios
The results for the alternative scenarios allow assessing the influence of using different input values on the performance of the DDRT system. First, we analyze the influence of variations in the adoption rate using the reference scenario as a comparison basis. Second, we evaluate how the DDRT system operations are impacted by the use of different operational parameters (\(I\), \({D}_{max}\), \({WT}_{max}\), and \({P}_{max}\)). Lastly, we compare systems that provide private and shared ride services. The comparisons are based on the KPIs considered more relevant, and their values are the average for the five operation days simulated.
Adoption rates
For this analysis, the values of adoption rates are 1%, 5%, 10%, 15%, and 20%, while the remaining input values are equal to the ones characterizing the reference scenario.
As the adoption rate grows, the operator is able to find more traveler groups to share their rides with others (Table 7), especially when comparing the lowest adoption rates with the highest ones. For example, an increase of 4 percentage points (p.p.) in the adoption rate, from 1 to 5%, results in 23% more traveler groups sharing a ride, while a 15 p.p. increase in the adoption rate, from 5 to 20%, leads to a 10% increase in the number of traveler groups sharing a ride.
The growth in demand brings benefits for both operator and travelers. For the operator, the increase in the number of trip requests leads to a reduction in the average VKT per trip request, thus enabling vehicles to serve more trips per day. The system operation is profitable for adoption rates starting at 5%. Instead, for the adoption rate of 1%, the operator incurs losses of 500 EUR per day. The relation between the total profit and the adoption rate follows a linear trendline with a determination coefficient of 0.996 (Fig. 16). Based on this trendline, an adoption rate of 2% is enough to avoid losses in the scenario under analysis. For travelers, the higher demand results in a slightly lower average waiting time and the average ETA delay remains at 5 min despite more travelers share rides.

Relationship between the total profit and the adoption rate
When compared to the current situation, the DDRT system is able to replace from 8 (adoption rate of 1%) to 13 (adoption rate of 20%) private vehicles. As the demand grows, the system can replace more vehicles with a smaller variation in the VKT. These results are similar to others reported in the literature, according to which the private vehicles replaced rate generally lie between 5 and 11 and the variation in the VKT remains below 25% (Narayanan et al. 2020). We should highlight that, for the adoption rate of 20%, where 88% of the traveler groups share a ride, the variation of VKT is negative. This occurs when the average vehicle occupancy reaches almost 3 occupied seats per trip.
Operational parameters
In this analysis, we use alternative values for four operational parameters: inter-assignment time (\(I\)), maximum ETA delay (\({D}_{max}\)), maximum waiting time \(({WT}_{max}\)), and maximum percentage of time parked per day (\({P}_{max}\)). Only one operational parameter is changed in each alternative scenario, and the others remain at their default values. For \(I\) (default value of 2 min), we test the alternative values of 5 and 10 min. For \({D}_{max}\) (default value of 10 min), we evaluate the alternative values of 20 and 30 min. For \({WT}_{max}\) (default value of 15 min), we use the values of 10 and 20 min. Finally, the values of 0.9 and 1 are used for \({P}_{max}\) (default value of 0.8). This results in a total of 9 scenarios (8 alternative scenarios plus the reference scenario) which are compared using a set of traveler and operator KPIs.
The fleet sizes and average waiting times associated to the 9 scenarios are shown in Fig. 17. In terms of fleet, 4 out of the 9 scenarios have fleets of over 600 vehicles. These scenarios are the ones with \(I\) equal to 5 or 10 min and \({P}_{max}\) equal to 0.9 or 1. The \(I\) parameter also has a significant effect on the average waiting times, which makes sense since it impacts the chances of travelers being assigned before reaching the \({WT}_{max}\). The change in the \(I\) from 2 min (default) to 10 min causes an increase of almost 90% (8 min) in the average waiting time.

Fleet sizes and average waiting times for different operational parameter values
Looking at the relative variations caused by different operational parameter values (Table 8), it is clear that the \({D}_{max}\) parameter has the most significant impact on the experiences of both operator and travelers. Although the increase in \({D}_{max}\) from 10 to 30 min enables 16% more traveler groups to share a ride, the consequences of this increase are a costlier operation (8% increase in total costs) and a substantially higher travel time for travelers in shared rides (120% increase in the average ETA delay). On the other hand, the parameter that has the least significant impact is \({WT}_{max}\). Indeed, a 10-min increase in this parameter (from 10 to 20 min) results in variations of less than 5% on the KPIs analyzed.
Service type
The service types considered are private and shared rides. The reference scenario allowing traveler groups to share a ride whenever possible (shared rides) is compared to an alternative scenario that only allows the use of a traveler group per ride (private rides).
Comparing the results for the private and shared ride services (Table 9), it can be seen that enabling travelers to share rides leads to positive outcomes from the operator’s point of view. First, we can highlight that the demand is served with 12% (74) fewer vehicles in the system with shared rides when compared to the one with private rides. In terms of VKT, vehicles in the system with shared rides travel 7% (16,264 km) fewer kilometers per day than the ones in the system with private rides. Finally, as for the daily balance of total revenues and costs, the system with shared rides is 54% more profitable than the one with private rides (6,255 EUR vs. 4,069 EUR), though results show that both systems are profitable.
Regarding the traveler experience, both scenarios have average waiting times below the default \({WT}_{max}\) of 15 min. However, travelers in the system with shared rides wait, in average, 80% longer than the ones in the system with private rides (9 min vs. 5 min). The difference between the two scenarios, considering the number of travelers that are served within the \({WT}_{max}\), is equal to 10 p.p. (97% for the system with private rides and 87% for the one with shared rides). Additionally, the average vehicle occupancy is 2.4 in the system with shared rides and 1.3 in the one with private rides (average vehicle occupancy in the system with private rides is higher than 1 due to the traveler groups).
Looking at the KPIs that enable the comparison between the DDRT systems and the current situation in Table 9, we see that the system with shared rides is associated with the highest private vehicle replacement rate and the smallest variation in the VKT. One driverless vehicle can replace 10 private vehicles in the system with shared rides, and only 9 in the one with private rides. The variation in the VKT is 7 p.p. smaller in the system with shared rides when compared to the one with private rides.
Conclusion
There are great expectations and doubts regarding the future of mobility systems with the emergence of driverless vehicles. In this study, we investigate the early-stage operations of a regional driverless demand-responsive transit (DDRT) system. More specifically, we assess its operation under different demand scenarios focusing on low adoption rates. A methodological approach relying on agent-based modeling and simulation (ABMS) was developed to assess the daily operation of the system. The developed model replicates in detail multiple days of system operations, including vehicle charging and relocations.
The proposed methodological approach was applied to a case study involving the Region of Coimbra (Portugal). A total of 14 scenarios varying in terms of adoption rates (from 1 to 20%), operational parameters, and type of service (private and shared rides) have been analyzed. Results show that, depending on the scenario, one vehicle in the DDRT system can replace from 8 to 13 conventional private vehicles with an expected variation in the vehicle-kilometers traveled between -1% and 24%. The DDRT system with shared rides is estimated to be profitable for 2% of the total trips currently made by private vehicles. If this percentage is only 1%, then there would be an average daily loss of 500 EUR. When considering the adoption rate of 5%, the shared ride type of service is 54% more profitable than the private ride one, but shared rides lead naturally to detours and to, in average, 80% longer waiting times.
Despite our study provides important insights into the operation of regional DDRT services under low adoption rates, the methodological approach upon which it relies has two limitations that we need to acknowledge. The first is that the demand is taken as exogenous, hence it is not impacted by the characteristics of the service. Although we recognize that the approach would be enriched with the use of a mode choice model, it is important to highlight that the intention of this study is not to foresee future driverless usage behavior. Instead, the impact of different travel demands on the operation of the DDRT system is tested by considering different adoption rates. The second limitation is that our approach assumes that vehicles move with a constant travel speed during the day in an uncongested road network. This helps to decrease the computational effort when the study region is characterized by good road networks and low traffic volumes. However, the effects of traffic congestion on travel speed should not be ignored in the case of high-density study regions since high travel times have a direct impact on the daily trips per vehicle and consequently on the operator’s profit.
In the future, we expect to improve the work described in this paper to overcome the limitations identified above and, more broadly, to make the proposed methodological approach applicable in more general conditions, e.g., for it to be capable of dealing with heterogeneous driverless vehicle fleets and hub-based service networks (i.e., travelers can travel to a destination not only directly but also through a hub where trips from different origins to that destination are consolidated). This will undoubtedly enable a more comprehensive and thorough assessment of the potential of regional driverless demand-responsive transit services.
References
Acheampong, R.A., Cugurullo, F.: Capturing the behavioural determinants behind the adoption of autonomous vehicles: conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transport. Res. f: Traffic Psychol. Behav. 62, 349–375 (2019). https://doi.org/10.1016/j.trf.2019.01.009
Bernhart, W., Kaise, H., Ohashi, Y., Schönberg, T., & Schilles, L. (2018). Autonomous driving as a solution for non-urban mobility Management summary. Roland Berger Focus, March
Borshchev, A. (2013). The Big Book of Simulation Modeling — AnyLogic Simulation Software. Anylogic North America
Bösch, P.M., Becker, F., Becker, H., Axhausen, K.W.: Cost-based analysis of autonomous mobility services. Transp. Policy 64, 76–91 (2018). https://doi.org/10.1016/J.TRANPOL.2017.09.005
Dandl, F., Hyland, M., Bogenberger, K., Mahmassani, H.S.: Evaluating the impact of spatio-temporal demand forecast aggregation on the operational performance of shared autonomous mobility fleets. Transportation 46(6), 1975–1996 (2019). https://doi.org/10.1007/s11116-019-10007-9
Fagnant, D.J., Kockelman, K.M.: Dynamic ride-sharing and fleet sizing for a system of shared autonomous vehicles in Austin Texas. Transportation 45(1), 143–158 (2018). https://doi.org/10.1007/s11116-016-9729-z
Farhan, J., Chen, T.D.: Impact of ridesharing on operational efficiency of shared autonomous electric vehicle fleet. Transp. Res. Part C Emerg. Technol. 93, 310–321 (2018). https://doi.org/10.1016/j.trc.2018.04.022
Franco, P., Johnston, R., McCormick, E.: Demand responsive transport: Generation of activity patterns from mobile phone network data to support the operation of new mobility services. Transp. Res. Part A Policy Pract. 131, 244–266 (2020). https://doi.org/10.1016/j.tra.2019.09.038
Galp (2022). Soluções de carregamento. https://galp.com/pt/pt/particulares/estrada/solucoes-galp#casa Access date: May 26, 2022
Gurumurthy, K.M., Kockelman, K.M.: Analyzing the dynamic ride-sharing potential for shared autonomous vehicle fleets using cellphone data from Orlando, Florida. Comput. Environ. Urban Syst. 71, 177–185 (2018). https://doi.org/10.1016/j.compenvurbsys.2018.05.008
Haboucha, C.J., Ishaq, R., Shiftan, Y.: User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 78, 37–49 (2017). https://doi.org/10.1016/J.TRC.2017.01.010
Hyland, M., Mahmassani, H.S.: Dynamic autonomous vehicle fleet operations: optimization-based strategies to assign AVs to immediate traveler demand requests. Transp. Res. Part C Emerg. Technol. 92(April), 278–297 (2018). https://doi.org/10.1016/j.trc.2018.05.003
IGP. (2020). Carta Administrativa Oficial de Portugal - Áreas das freguesias, concelhos, distritos e país. https://www.dgterritorio.gov.pt/cartografia/cartografia-tematica/caop Access date: May 25, 2020
INE. (2011). População residente por local de residência, grupo etário, e tipologia de áreas urbanas; Anual - INE, Estimativas anuais da população residente. https://www.ine.pt/xportal/xmain?xpid=INE&xpgid=ine_indicadores&indOcorrCod=0008858&contexto=bd&selTab=tab2 Access date: May 26, 2021
INE. (2021). População residente (N.o) por Local de residência, Sexo e Grupo etário; https://www.ine.pt/xportal/xmain?xpid=INE&xpgid=ine_indicadores&contecto=pi&indOcorrCod=0011166&selTab=tab0 Access date: May 30, 2022
Liu, J., Kockelman, K.M., Boesch, P.M., Ciari, F.: Tracking a system of shared autonomous vehicles across the Austin Texas Network Using Agent-Based Simulation. Transportation 44(6), 1261–1278 (2017). https://doi.org/10.1007/s11116-017-9811-1
Martin, E., Shaheen, S.: The impact of carsharing on public transit and non-motorized travel: an exploration of North American carsharing survey data. Energies 4(11), 2094–2114 (2011). https://doi.org/10.3390/en4112094
Martinez, L.M., Viegas, J.M.: Assessing the impacts of deploying a shared self-driving urban mobility system: An agent-based model applied to the city of Lisbon, Portugal. Int. J. Transp. Sci. Technol. 6(1), 13–27 (2017). https://doi.org/10.1016/J.IJTST.2017.05.005
Mobility House. (2021). Charging time summary for EVs. https://www.mobilityhouse.com/int_en/knowledge-center/charging-time-summary Access date: May 26, 2022
Narayanan, S., Chaniotakis, E., Antoniou, C.: Shared autonomous vehicle services: a comprehensive review. Transp. Res. Part C Emerg. Technol. 111(January), 255–293 (2020). https://doi.org/10.1016/j.trc.2019.12.008
Oh, S., Seshadri, R., Azevedo, C.L., Kumar, N., Basak, K., Ben-Akiva, M.: Assessing the impacts of automated mobility-on-demand through agent-based simulation: a study of Singapore. Transp. Res. Part A Policy Pract. 138(May), 367–388 (2020). https://doi.org/10.1016/j.tra.2020.06.004
OSM. (2014). Open Street Map. https://www.openstreetmap.org/#map=10/40.0691/-8.4883 Access date: May 30, 2022
Rogers, E.M.: Diffusion of innovations, 5th edn. Free Press (2003)
Sabouri, S., Brewer, S., Ewing, R.: Exploring the relationship between ride-sourcing services and vehicle ownership, using both inferential and machine learning approaches. Landsc. Urban Plan. 198, 103797 (2020). https://doi.org/10.1016/j.landurbplan.2020.103797
SAE International. (2021). Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE International.
Santos, G.G.D., de Correia, G.H.A.: A flow-based integer programming approach to design an interurban shared automated vehicle system and assess its financial viability. Transp. Res. Part C Emerg. Technol. 128, 103092 (2021). https://doi.org/10.1016/j.trc.2021.103092
Scheltes, A., de Correia, G.H.A.: Exploring the use of automated vehicles as last mile connection of train trips through an agent-based simulation model: an application to Delft, Netherlands. Int. J. Transp. Sci. Technol. 6(1), 28–41 (2017). https://doi.org/10.1016/J.IJTST.2017.05.004
Schlüter, J., Bossert, A., Rössy, P., Kersting, M.: Impact assessment of autonomous demand responsive transport as a link between urban and rural areas. Res. Transp. Bus. Manag. (2020). https://doi.org/10.1016/j.rtbm.2020.100613
Selectra. (2022). Preço kWh Eletricidade e Gás das Fornecedoras em Portugal. https://lojaluz.com/faq/preco-kwh Access date: October 13, 2022
Sieber, L., Ruch, C., Hörl, S., Axhausen, K.W., Frazzoli, E.: Improved public transportation in rural areas with self-driving cars: a study on the operation of Swiss train lines. Transp. Res. Part A Policy Pract. 134(February), 35–51 (2020). https://doi.org/10.1016/j.tra.2020.01.020
TIS.pt. (2009). Inquérito à mobilidade na área de influência do sistema de mobilidade do Mondego, Coimbra.
Transdev. (2022). Titulos de transporte - rodoviária beira litoral. https://www.transdev.pt/sites/default/files/anexos/transdev_tarifas_rbl_2201_2.pdf Access date: October 13, 2022
Waymo. (2022). Wheels up for Waymo as we expand our 24/7 rider-only territories. https://blog.waymo.com/2022/12/wheels-up-for-waymo-as-we-expand.html Access date: March 8, 2023
Yap, M.D., Correia, G., van Arem, B.: Preferences of travellers for using automated vehicles as last mile public transport of multimodal train trips. Transp. Res. Part A Policy Pract. 94, 1–16 (2016). https://doi.org/10.1016/j.tra.2016.09.003
Zhang, W., Guhathakurta, S.: Residential location choice in the era of shared autonomous vehicles. J. Plan. Educ. Res. 41(2), 135–148 (2021). https://doi.org/10.1177/0739456X18776062
Zhang, W., Guhathakurta, S., Fang, J., Zhang, G.: Exploring the impact of shared autonomous vehicles on urban parking demand: an agent-based simulation approach. Sustain. Cities Soc. 19, 34–45 (2015). https://doi.org/10.1016/J.SCS.2015.07.006
Funding
Open access funding provided by FCT|FCCN (b-on).
Author information
Authors and Affiliations
Contributions
All authors contributed to the conception, the design, and the manuscript preparation. ASP developed the model and performed the analysis. All authors reviewed the results and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 (MP4 101361 KB)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Patricio, A.S., Santos, G.G.D. & Antunes, A.P. Assessing the introduction of regional driverless demand-responsive transit services through agent-based modeling and simulation. Transportation (2023). https://doi.org/10.1007/s11116-023-10450-9
Accepted:
Published:
DOI: https://doi.org/10.1007/s11116-023-10450-9