
Abstract
The Zoomeron model covers particular kinds of solitons with distinctive properties that appear in several physical scenarios, such as, fluid dynamics, nonlinear optics and laser physics. First time utilising the mapping method, we determine the analytical solution to the described model, including several novel dynamical behaviours. Through symbolic computation, we are able to derive the breather waves, kink waves, dark soliton, singular soliton, periodic soliton and bright soliton of this model. Additionally, we encounter single kink waves and single breather waves. We find novel hyperbolic trigonometric, rational and elliptic functions. Modelling our observations with MATLAB tools and producing many 3D graphs. The results obtained will be crucial for further research on complicated nonlinear models.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear evolutionary models have demonstrated their utility in the modern era, addressing challenges spanning across physical–mathematical realms encompassing biology, engineering, chemistry, physics, and practical applications in daily life (Rasool et al. 2023; Rezazadeh et al. 2023; Ullah et al. 2022; Ashraf et al. 2023, 2022; Seadawy et al. 2022; Rizvi et al. 2023). These models encompass a range of challenges within nonlinear sciences, spanning from the Fokas–Lenells model (Ullah et al. 2023) and the BBS model (Ullah et al. 2021) to the Zoomeron model (Irshad and Mohyud-din 2013; Morris and Leach 2014) and the Biswas–Arshed model (Ullah et al. 2022), encompassing phenomena like the KdV model (Arora et al. 2022) and the Schrödingerr system (Xiang and Zuo 2022). Initially introduced by Calogero and Degasperis in 1976, the Zoomeron model describes concealed qualities and solitons observed in nonlinear physics, fluid mechanics, and laser optics (Ullah et al. 2023; Yao et al. 2022). Solitons, as self-reinforcing solitary waves, retain their shape while traveling at a constant speed, arising from the cancellation of nonlinear and dispersive effects in a medium.
The current research is focused on the nonlinear evolutionary Zoomeron equation. In 1976, Calogero and Degasperis reached a breakthrough during the time they investigated the one-dimensional Schrödinger equation and an extension of the well-known KdV equation to depict solitons that travel at different speeds and found a connection between their polarisation effects and velocities. This investigation led to the identification of two distinct soliton types: the Boomeron, traveling from one side in the distant past to the original side in the far future at the same speed, and the Trappon, oscillating around a fixed point while altering direction periodically.
Therefore, discovering precise and analytical solutions to nonlinear evolutionary problems stands as a critical task for mathematical physicists. Several direct methods have been employed to explore the provided incognito evolution equation, some notably being the extended direct algebraic technique (Gao et al. 2020), the extended exp\((-\phi \left( \xi \right) )\)-expansion and exponential rational function techniques (Kumar and Kaplan 2018), as well as the new Jacobi elliptic function expansion method, the exponential rational function method, and the Jacobi elliptic function rational expansion method (Tala-Tebue et al. 2018). Other approaches include the modified Kudryashov method (Hosseini et al. 2021), \(\left( \frac{G^{'}}{G}\right)\)-expansion method (Abazari 2011), sine-cosine function method (Qawasmeh 2013), exp-function method, modified simple equation method (Khan and Akbar 2014), and auxiliary equation method (Topsakal and Taşcan 2020). Additionally, the Zoomeron equation has been demonstrated to satisfy the P-property of integrability by Porsezian (1998), with analyses on symmetry and conservation laws by Motsepa et al. (2017) and stability examinations by Inc et al. (2018).
In this study, our purpose is to get new numerical solutions that are efficient, more accurate, flexible, robustness and stable. Nonlinear evolution equations have attracted extensive research attention, prompting investigations from various perspectives. Chen and Ren proposed an enhanced linear model for researching group competitive sports, delving into stability related to the model’s equilibrium points and Hopf branches (Chen and Ren 2021). Gao et al. utilized the extended sinh Gordon equation expansion technique to study the Hirota-Maccari system, revealing solitary, complex, and single periodic solutions as traveling patterns for the system (Yel et al. 2021). Similarly, Baskonus et al. explored the same technique in analyzing an equation describing nonlinear surface gravity waves over a horizontal seafloor (Sulaiman et al. 2021). Moreover, Bilal et al. utilized the generalized exponential rational function technique to examine the dynamic behavior of a physical model (Bilal et al. 2021), while Zhirong and Alghazzawi employed a fractional differential model to study psychological barriers and methods for overcoming mental challenges in college students (Zhirong and Alghazzawi 2021), with related works incorporating fractional models (Aghili 2021; Yu and Kong 2021). Despite these extensive investigations, numerous physical models remain unexplored, demanding innovative mathematical techniques to comprehend their dynamic processes.
The following is how this work is organized: Sect. 2 provides the Zoomeron model’s ODE conversion. The Mapping method algorithm is presented in Sect. 3, and its essential components exhibit a variety of solutions. The use of the recommended method to solving the Zoomeron problem is demonstrated in Sect. 4 alongside graphical representations of the determined solutions. Finally, we offer some last conclusions in Sect. 5.
2 ODE form of the proposed model
In this section, let’s consider the \((2+1)\)-dimensional nonlinear framework referred to as the Zoomeron model:
The magnitude of the soliton is written as Q(x, y, t), where x, y and t are position and time components, respectively. By taking the linear transformation into account \(Q(x, y, t) = Q(\xi )\), \(\xi = x + ry - vt\), The phenomenon associated to trappons and boomerons is described by the nonlinear Eq. 2.1. It also clarifies the mechanism behind complicated physical problems. Thus, the Zoomeron equation contains specific types of solitons with distinctive properties that arise in a number of physical contexts, such as nonlinear optics, laser physics and fluid dynamics (Duran 2021; Morris and Leach 2014). An ordinary differential form of Eq. 2.1 is as follows:
k is the integration constant in this scenario. N is obtained by balancing the nonlinear term \(U^3\) alongside the linear term \(U''\) which gives \(N + 2 = 3N\), and thus, \(N = 1\).
3 The mapping method
Here we use the mapping method (Peng 2003) for finding the solutions of Eq. 2.2. As a consequence, the basic idea is as follows. For a given non-linear partial differential equation, say in three independent variables,
By taking linear transformation in the form
where r is real constant and v is velocity. Substituting Eq. 3.2 into Eq. 3.1 yields an ordinary differential equation of \(U(\xi )\). Then \(U(\xi )\) is expended into a polynomial in \(W(\xi )\).
where \(a_{{i}}\) are constants to be determined, and n is fixed by balancing the linear term of the highest order derivative with nonlinear term, while W satisfies the first kind of elliptic equation.
here the primes means the derivatives with respect to \(\xi\). After Eq. 3.3 with Eq. 3.4 is substituted into the ordinary differential equation, the coefficients \(a_{i}\), \(p_{1}\), \(p_{2}\), \(p_{3}\) may be determined. Thus Eq. 3.3 establishes an algebraic mapping relation between the solution for Eq. 3.1 and that of Eq. 3.2.
Where \(p_{1}, p_{2},\) and \(p_{3}\) are actual parameters. We observe that there are various solutions to Eq. 3.4, based on \(p_{1}, p_{2},\) and \(p_{3}\), as shown in the following. Every answer to Eq. 3.4 depend upon for a variation of \(p_{1}, p_{2},\) and \(p_{3}\) values.
Type 1:
If \(p_{1}=2m^{2},\,p_{2}=-(1+m^{2}),\,p_{3}= 1\) then \(W(\xi )= sn(\xi )\),
Type 2:
If \(p_{1}=2, p_{2}=\,2\,{m}^{2}-1,\,p_{3}=- m^{2} \left( 1-{m}^{2} \right)\) then \(W(\xi )= ds(\xi )\),
Type 3:
If \(p_{1}=2, p_{2}=2-m^{2},p_{3}= 1-{m}^{2}\) then \(W(\xi )= cs(\xi )\),
Type 4:
If \(p_{1}=-2\,m^{2}, p_{2}=\,2\,{m}^{2}-1,p_{3}= 1-{m}^{2}\) then \(W(\xi )= cn(\xi )\),
Type 5:
If \(p_{1}=-2, p_{2}=2-{m}^{2},p_{3}= {m}^{2}-1\) then \(W(\xi )= dn(\xi )\),
Type 6:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{1}{4}}\) then \(W(\xi )= {\frac{sn(\xi )}{1\pm dn (\xi )}}\),
Type 7:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{m^{{2}}}{4}}\) then \(W(\xi )= {\frac{sn(\xi )}{1\pm dn (\xi )}}\),
Type 8:
If \(p_{1}={\frac{-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{- \left( 1-{m}^{2} \right) ^{2}}{4}}\) then \(W(\xi )= mcn\left( \xi \right) + dn\left( \xi \right)\),
Type 9:
If \(p_{1}={\frac{{m}^{2}-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{{m}^{2}-1}{4}}\) then \(W(\xi )= {\frac{dn(\xi )}{1\pm sn (\xi )}}\),
Type 10:
If \(p_{1}={\frac{1-{m}^{2}}{2}}, p_{2}={\frac{1-{m}^{2}}{2}},p_{3}= {\frac{1-{m}^{2}}{4}}\) then \(W(\xi )= {\frac{cn(\xi )}{1\pm sn (\xi )}}\),
Type 11:
If \(p_{1}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}}, p_{2}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}},p_{3}= {\frac{1}{4}}\) then \(W(\xi )= {\frac{sn(\xi )}{dn\pm cn (\xi )}}\),
Type 12:
If \(p_{1}=2, p_{2}=0,p_{3}= 0\) then \(W(\xi )={\frac{c}{\xi }}\),
Type 13:
If \(p_{1}=0, p_{2}=1,p_{3}= 0\) then \(W(\xi )= ce^{\xi }\).
Such that \(dn \left( \xi \right) = dn \left( \xi , m\right) , sn \left( \xi \right) = sn \left( \xi , m\right) ,cn \left( \xi \right) = cn \left( \xi , m\right)\) and for \(0<m <1\) seem to be the Jacobi elliptic functions (JEFs) (Ullah et al. 2024). The subsequent hyperbolic functions are generated from JEFs whenever \(m \rightarrow 1\)
The triangular functions that result from \(m \rightarrow 0\) are just as follows:
4 Application of the mapping method
By applying homogeneous balance number in Eq. 3.3 which is \(N + 2 = 3N\), and thus, \(N = 1\).
where \(a_{0}\), and \(a_{1}\) represent constants that require determination, ensuring that \(a_{1} \ne 0\). By substituting Eqs. 4.1 and 3.4 into Eq. 2.2 and equating the coefficients of all powers of \(W^{i}\), where \(i = 0, 1, 2, 3\), to zero, we obtain the subsequent system of algebraic equations.
Solving the system of algebraic Eq. 4.2 with the aid of Maple, we have the following set of results:
Case 1:
Upon substituting Eqs. 4.3 and 3.4 into Eq. 4.1, we arrive at the subsequent exact solution for Eq. 2.2. Now, Eq. 2.2 has the following many new exact solutions:
If \(m \rightarrow 1\), then we obtain the soliton wave solution
Type 1:
If \(p_{1}=2m^{2},\,p_{2}=-(1+m^{2}),\,p_{3}= 1\) then \(W(\xi )= sn(\xi )\) and the solution of the Eq. 2.2 are
Type 2:
If \(p_{1}=2, p_{2}=\,2\,{m}^{2}-1,\,p_{3}=- m^{2} \left( 1-{m}^{2} \right)\) and the solution of the Eq. 2.2 are
Type 3:
If \(p_{1}=2, p_{2}=2-m^{2},p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 4:
If \(p_{1}=-2m^{2}, p_{2}=\,2\,{m}^{2}-1,p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 5:
If \(p_{1}=-2, p_{2}=2-{m}^{2},p_{3}= {m}^{2}-1\) and the solution of the Eq. 2.2 are
Type 6:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
Type 7:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{m^{{2}}}{4}}\) and the solution of the Eq. 2.2 are
Type 8:
If \(p_{1}={\frac{-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{- \left( 1-{m}^{2} \right) ^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 9:
If \(p_{1}={\frac{{m}^{2}-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{{m}^{2}-1}{4}}\) and the solution of the Eq. 2.2 are
Type 10:
If \(p_{1}={\frac{1-{m}^{2}}{2}}, p_{2}={\frac{1-{m}^{2}}{2}},p_{3}= {\frac{1-{m}^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 11:
If \(p_{1}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}}, p_{2}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
If \(m \rightarrow 0\), then we obtain the soliton wave solution:
Type 1:
If \(p_{1}=2m^{2},\,p_{2}=-(1+m^{2}),\,p_{3}= 1\) then \(W(\xi )= sn(\xi )\) and the solution of the Eq. 2.2 are
Type 2:
If \(p_{1}=2, p_{2}=\,2\,{m}^{2}-1,\,p_{3}=- m^{2} \left( 1-{m}^{2} \right)\) and the solution of the Eq. 2.2 are
Type 3:
If \(p_{1}=2, p_{2}=2-m^{2},p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 4:
If \(p_{1}=-2m^{2}, p_{2}=\,2\,{m}^{2}-1,p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 5:
If \(p_{1}=-2, p_{2}=2-{m}^{2},p_{3}= {m}^{2}-1\) and the solution of the Eq. 2.2 are
Type 6:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
Type 7:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{m^{{2}}}{4}}\) and the solution of the Eq. 2.2 are
Type 8:
If \(p_{1}={\frac{-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{- \left( 1-{m}^{2} \right) ^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 9:
If \(p_{1}={\frac{{m}^{2}-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{{m}^{2}-1}{4}}\) and the solution of the Eq. 2.2 are
Type 10:
If \(p_{1}={\frac{1-{m}^{2}}{2}}, p_{2}={\frac{1-{m}^{2}}{2}},p_{3}= {\frac{1-{m}^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 11:
If \(p_{1}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}}, p_{2}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
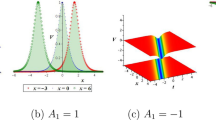
5 Graphical representation
This section exhibited 3D and contour representations of the Zoomeron equation for case 1.

For the given parameters \(r=1\), \(k=0.1\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{1,1}(x, y, t)\) is shown on the right

For the given parameters \(r=1\), \(k=1\), and \(v=3\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{2,1}(x, y, t)\) is shown on the right

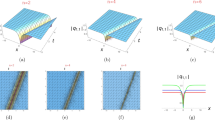
For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{1,8}(x, y, t)\) is shown on the right

For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{2,4}(x, y, t)\) is shown on the right

For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{2,5}(x, y, t)\) is shown on the right

For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{2,8}(x, y, t)\) is shown on the right

For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{1,12}(x, y, t)\) is shown on the right

For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{1,15}(x, y, t)\) is shown on the right

For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{1,17}(x, y, t)\) is shown on the right

For the given parameters \(r=0.1\), \(k=0.5\), and \(v=0.5\), the 3-D graph is displayed on the left, while the contour graph illustrating the solution \(Q_{1,18}(x, y, t)\) is shown on the right
Case 2:
Substituting Eq. 4.4 along with Eq. 3.4 into Eq. 4.1, we get the following exact solution of Eq. 2.2. Now, Eq. 2.2 has the following many new exact solutions:
If \(m \rightarrow 1\), then we obtain the soliton wave solution
Type 1:
If \(p_{1}=2m^{2},\,p_{2}=-(1+m^{2}),\,p_{3}= 1\) then \(W(\xi )= sn(\xi )\) and the solution of the Eq. 2.2 are
Type 2:
If \(p_{1}=2, p_{2}=\,2\,{m}^{2}-1,\,p_{3}=- m^{2} \left( 1-{m}^{2} \right)\) and the solution of the Eq. 2.2 are
Type 3:
If \(p_{1}=2, p_{2}=2-m^{2},p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 4:
If \(p_{1}=-2m^{2}, p_{2}=\,2\,{m}^{2}-1,p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 5:
If \(p_{1}=-2, p_{2}=2-{m}^{2},p_{3}= {m}^{2}-1\) and the solution of the Eq. 2.2 are
Type 6:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
Type 7:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{m^{{2}}}{4}}\) and the solution of the Eq. 2.2 are
Type 8:
If \(p_{1}={\frac{-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{- \left( 1-{m}^{2} \right) ^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 9:
If \(p_{1}={\frac{{m}^{2}-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{{m}^{2}-1}{4}}\) and the solution of the Eq. 2.2 are
Type 10:
If \(p_{1}={\frac{1-{m}^{2}}{2}}, p_{2}={\frac{1-{m}^{2}}{2}},p_{3}= {\frac{1-{m}^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 11:
If \(p_{1}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}}, p_{2}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
Type 12:
If \(p_{1}=2, p_{2}=0,p_{3}= 0\) and the solution of the Eq. 2.2 are
Type 13:
If \(p_{1}=2, p_{2}=0,p_{3}= 0\) and the solution of the Eq. 2.2 are
If \(m \rightarrow 0\), then we obtain the soliton wave solution
Type 1:
If \(p_{1}=2m^{2},\,p_{2}=-(1+m^{2}),\,p_{3}= 1\) then \(W(\xi )= sn(\xi )\) and the solution of the Eq. 2.2 are
Type 2:
If \(p_{1}=2, p_{2}=\,2\,{m}^{2}-1,\,p_{3}=- m^{2} \left( 1-{m}^{2} \right)\) and the solution of the Eq. 2.2 are
Type 3:
If \(p_{1}=2, p_{2}=2-m^{2},p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 4:
If \(p_{1}=-2m^{2}, p_{2}=\,2\,{m}^{2}-1,p_{3}= 1-{m}^{2}\) and the solution of the Eq. 2.2 are
Type 5:
If \(p_{1}=-2, p_{2}=2-{m}^{2},p_{3}= {m}^{2}-1\) and the solution of the Eq. 2.2 are
Type 6:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
Type 7:
If \(p_{1}={\frac{m^{{2}}}{2}}, p_{2}={\frac{{m}^{2}-2}{2}},p_{3}= {\frac{m^{{2}}}{4}}\) and the solution of the Eq. 2.2 are
Type 8:
If \(p_{1}={\frac{-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{- \left( 1-{m}^{2} \right) ^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 9:
If \(p_{1}={\frac{{m}^{2}-1}{2}}, p_{2}={\frac{{m}^{2}+1}{2}},p_{3}= {\frac{{m}^{2}-1}{4}}\) and the solution of the Eq. 2.2 are
Type 10:
If \(p_{1}={\frac{1-{m}^{2}}{2}}, p_{2}={\frac{1-{m}^{2}}{2}},p_{3}= {\frac{1-{m}^{2}}{4}}\) and the solution of the Eq. 2.2 are
Type 11:
If \(p_{1}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}}, p_{2}={\frac{ \left( 1-{m}^{2} \right) ^{2}}{2}},p_{3}= {\frac{1}{4}}\) and the solution of the Eq. 2.2 are
Type 12:
If \(p_{1}=2, p_{2}=0,p_{3}= 0\) and the solution of the Eq. 2.2 are
Type 13:
If \(p_{1}=2, p_{2}=0,p_{3}= 0\) and the solution of the Eq. 2.2 are
6 The graphical representation
This section exhibited 3D and contour representations of the Zoomeron equation for case 2.
7 Physical interpretation
In this section, the contour and 3D plots that are displayed in the graphical representation portion were discussed. These graphs are used to show the form of the wave function and the physical behavior of the found solutions. We discuss how to read these plots and how important they are to comprehending the characteristics of the solutions. The 3D plot and the contour plot of the complex wave function can both be used to see the wave function’s behavior and obtain understanding of the dynamics of the system. Each of the newly found solutions has a unique structure. Dark solitary wave solutions are shown in Figs. 1 and 2. Bright solitary wave solutions are shown in Figs. 3, 4, 5 and 6 and periodic solitary wave solutions are shown in Figs. 7, 8, 9 and 10.
8 Discussion and conclusion
Applying the mapping method, we were able to correctly obtain the analytical solutions to the Zoomeron model. With the use of these methods, the suggested model may be reduced to an algebraic system that can be resolved using any computational tool. Through symbolic computation, we were able to derive the breather waves, kink waves, dark soliton, singular soliton, periodic soliton and bright soliton of this model. A number of previously acquired results are provided in Duran et al. (2023), Butt et al. (2021), Inc et al. (2017), Alshammari et al. (2023), Islam et al. (2024), Uddin et al. (2023), Ullah et al. (2023), Ullah et al. (2023), Rahman et al. (2021), Ullah (2023) and Rahman et al. (2021). Thus, we can draw the conclusion that the provided methods are reliable, credible, and helpful as well as they can be used to tackle a variety of nonlinear structures that occur in nonlinear research. The uniqueness of this study is demonstrated by the fact that the acquired results are unique as they have never been mentioned in the literature (Al-Askar et al. 2022; Ullah et al. 2023). We can predict that these findings will have a significant impact on future studies.A funding declaration is mandatory for publication in this journal. Please confirm that this declaration is accurate, or provide an alternative.
Data availability
No datasets were generated or analysed during the current study.
References
Abazari, R.: The solitary wave solutions of Zoomeron equation. Appl. Math. Sci. 5(59), 2943–2949 (2011)
Aghili, A.: Complete solution for the time fractional diffusion problem with mixed boundary conditions by operational method. Appl. Math. Nonlinear Sci. 6(1), 9–20 (2021)
Al-Askar, F.M., Cesarano, C., Mohammed, W.W.: Multiplicative Brownian motion stabilizes the exact stochastic solutions of the Davey–Stewartson equations. Symmetry 14(10), 2176 (2022)
Alshammari, F.S., Rahman, Z., Roshid, H.O., Ullah, M.S., Aldurayhim, A., Ali, M.Z.: Dynamical structures of multi-solitons and interaction of solitons to the higher-order KdV-5 equation. Symmetry 15(3), 626 (2023)
Arora, G., Rani, R., Emadifar, H.: Soliton: a dispersion-less solution with existence and its types. Heliyon 8, e12122 (2022)
Ashraf, F., Javeed, T., Ashraf, R., Rana, A., Akgül, A.: Some new soliton solution to the higher dimensional Burger–Huxley and shallow water waves equation with couple of integration architectonic. Results Phys. 43, 106048 (2022)
Ashraf, R., Ashraf, F., Akgül, A., Ashraf, S., Alshahrani, B., Mahmoud, M., Weera, W.: Some new soliton solutions to the (3+1)-dimensional generalized KdV-ZK equation via enhanced modified extended tanh-expansion approach. Alex. Eng. J. 69, 303–309 (2023)
Bilal, M., Younas, U., Baskonus, H.M., Younis, M.: Investigation of shallow water waves and solitary waves to the conformable 3D-WBBM model by an analytical method. Phys. Lett. A 403, 127388 (2021)
Butt, R.I., Rehman, M.U., Abdeljawad, T., Kilinc, G.: Stability analysis of p-Laplacian fractional difference equation. Dyn. Syst. Appl. 30(1), 17–32 (2021)
Chen, S., Ren, Y.: Small amplitude periodic solution of Hopf Bifurcation Theorem for fractional differential equations of balance point in group competitive martial arts. Appl. Math. Nonlinear Sci. 7(1), 207–214 (2021)
Duran, S.: An investigation of the physical dynamics of a traveling wave solution called a bright soliton. Phys. Scr. 96(12), 125251 (2021)
Duran, S., Yokus, A., Kilinc, G.: A study on solitary wave solutions for the Zoomeron equation supported by two-dimensional dynamics. Phys. Scr. 98(12), 125265 (2023)
Gao, W., Rezazadeh, H., Pinar, Z., Baskonus, H.M., Sarwar, S., Yel, G.: Novel explicit solutions for the nonlinear Zoomeron equation by using newly extended direct algebraic technique. Opt. Quant. Electron. 52, 1–13 (2020)
Hosseini, K., Korkmaz, A., Bekir, A., Samadani, F., Zabihi, A., Topsakal, M.: New wave form solutions of nonlinear conformable time-fractional Zoomeron equation in (2+ 1)-dimensions. Waves Random Complex Media 31(2), 228–238 (2021)
Inc, M., Inan, I.E., Ugurlu, Y.: New applications of the functional variable method. Optik 136, 374–381 (2017)
Inc, M., Yusuf, A., Aliyu, A.I., Baleanu, D.: Soliton solutions and stability analysis for some conformable nonlinear partial differential equations in mathematical physics. Opt. Quant. Electron. 50, 1–14 (2018)
Irshad, A., Mohyud-din, S.T.: Solitary wave solutions for Zoomeron equation. Walailak J. Sci. Technol. (WJST) 10(2), 201–208 (2013)
Islam, Z., Sheikh, M.A.N., Roshid, H.O., Hossain, M.A., Taher, M.A., Abdeljabbar, A.: Stability and spin solitonic dynamics of the HFSC model: effects of neighboring interactions and crystal field anisotropy parameters. Opt. Quant. Electron. 56(2), 190 (2024)
Khan, K., Akbar, M.A.: Traveling wave solutions of the (2+1)-dimensional Zoomeron equation and the Burgers equations via the MSE method and the Exp-function method. Ain Shams Eng. J. 5(1), 247–256 (2014)
Kumar, D., Kaplan, M.: New analytical solutions of (2+ 1)-dimensional conformable time fractional Zoomeron equation via two distinct techniques. Chin. J. Phys. 56(5), 2173–2185 (2018)
Morris, R.M., Leach, P.G.L.: Symmetry reductions and solutions to the Zoomeron equation. Phys. Scr. 90(1), 015202 (2014)
Morris, R.M., Leach, P.G.L.: Symmetry reductions and solutions to the Zoomeron equation. Phys. Scr. 90(1), 015202 (2014)
Motsepa, T., Khalique, C.M., Gandarias, M.L.: Symmetry analysis and conservation laws of the Zoomeron equation. Symmetry 9(2), 27 (2017)
Peng, Y.Z.: Exact solutions for some nonlinear partial differential equations. Phys. Lett. A 314(5–6), 401–408 (2003)
Porsezian, K.: Integrability aspects and soliton solutions of some field theoretical equations. Phys. Lett. A 240(4–5), 196–200 (1998)
Qawasmeh, A.: Soliton solutions of (2+ 1)-Zoomeron equation and Duffing equation and SRLW equation. J. Math. Comput. Sci. 3(6), 1475–1480 (2013)
Rahman, Z., Ali, M.Z., Ullah, M.S.: Analytical solutions of two space-time fractional nonlinear models using Jacobi elliptic function expansion method. Contemp. Math. 2, 173–188 (2021)
Rahman, Z., Ali, M.Z., Ullah, M.S., Wen, X.Y.: Dynamical structures of interaction wave solutions for the two extended higher-order KdV equations. Pramana 95(3), 134 (2021)
Rasool, T., Hussain, R., Rezazadeh, H., Gholami, D.: The plethora of exact and explicit soliton solutions of the hyperbolic local (4+1)-dimensional BLMP model via GERF method. Results Phys. 46, 106298 (2023)
Rezazadeh, H., Davodi, A.G., Gholami, D.: Combined formal periodic wave-like and soliton-like solutions of the conformable Schrödinger–KdV equation using the \(G^{^{\prime }}/G\)-expansion technique. Results Phys. 47, 106352 (2023)
Rizvi, S.T.R., Seadawy, A.R., Ahmed, S., Ashraf, R.: Lax pair, Darboux transformation, Weierstrass–Jacobi elliptic and generalized breathers along with soliton solutions for Benjamin Bona Mahony equation. Int. J. Mod. Phys. B 37, 2350233 (2023)
Seadawy, A.R., Rizvi, S.T.R., Batool, T., Ashraf, R.: Study of Sasa–Satsuma equation for Kunznetsov–Ma and generalized breathers, lump, periodic and rogue wave solutions. Int. J. Mod. Phys. B 37, 2350181 (2022)
Sulaiman, T.A., Bulut, H., Baskonus, H.M.: On the exact solutions to some system of complex nonlinear models. Appl. Math. Nonlinear Sci. 6(1), 29–42 (2021)
Tala-Tebue, E., Djoufack, Z.I., Djimeli-Tsajio, A., Kenfack-Jiotsa, A.: Solitons and other solutions of the nonlinear fractional Zoomeron equation. Chin. J. Phys. 56(3), 1232–1246 (2018)
Topsakal, M., Taşcan, F.: Exact travelling wave solutions for space-time fractional Klein–Gordon equation and (2+1)-dimensional time-fractional Zoomeron equation via auxiliary equation method. Appl. Math. Nonlinear Sci. 5(1), 437–446 (2020)
Uddin, M.S., Begum, M., Ullah, M.S., Abdeljabbar, A.: Soliton solutions of a (2+1)-dimensional nonlinear time-fractional Bogoyavlenskii equation model. Partial Differ. Equ. Appl. Math. 8, 100591 (2023)
Ullah, M.S.: Interaction solution to the (3+1)-D negative-order KdV first structure. Partial Differ. Equ. Appl. Math. 8, 100566 (2023)
Ullah, M.S., Ali, M.Z., Roshid, H.O., Seadawy, A.R., Baleanu, D.: Collision phenomena among lump, periodic and soliton solutions to a (2+1)-dimensional Bogoyavlenskii’s breaking soliton model. Phys. Lett. A 397, 127263 (2021)
Ullah, M.S., Alshammari, F.S., Ali, M.Z.: Collision phenomena among the solitons, periodic and Jacobi elliptic functions to a (3+1)-dimensional Sharma–Tasso–Olver-like model. Results Phys. 36, 105412 (2022)
Ullah, M.S., Abdeljabbar, A., Roshid, H.O., Ali, M.Z.: Application of the unified method to solve the Biswas–Arshed model. Results Phys. 42, 105946 (2022)
Ullah, M.S., Ali, M.Z., Rezazadeh, H.: Kink and breather waves with and without singular solutions to the Zoomeron model. Results Phys. 49, 106535 (2023)
Ullah, M.S., Seadawy, A.R., Ali, M.Z.: Optical soliton solutions to the Fokas–Lenells model applying the phi-6 model expansion approach. Opt. Quant. Electron. 55(6), 495 (2023)
Ullah, M.S., Roshid, H.O., Ali, M.Z.: New wave behaviors of the Fokas–Lenells model using three integration techniques. PLoS ONE 18(9), e0291071 (2023)
Ullah, M.S., Mostafa, M., Ali, M.Z., Roshid, H.O., Akter, M.: Soliton solutions for the Zoomeron model applying three analytical techniques. PLoS ONE 18(7), e0283594 (2023)
Ullah, M.S., Baleanu, D., Ali, M.Z.: Novel dynamics of the Zoomeron model via different analytical methods. Chaos Solitons Fractals 174, 113856 (2023)
Ullah, M.S., Roshid, H.O., Ali, M.Z.: New wave behaviors and stability analysis for the (2+ 1)-dimensional Zoomeron model. Opt. Quant. Electron. 56(2), 240 (2024)
Xiang, X.S., Zuo, D.W.: Breather and rogue wave solutions of coupled derivative nonlinear Schrödinger equations. Nonlinear Dyn. 107, 1195–1204 (2022)
Yao, S.W., Akram, G., Sadaf, M., Zainab, I., Rezazadeh, H., Inc, M.: Bright, dark, periodic and kink solitary wave solutions of evolutionary Zoomeron equation. Results Phys. 43, 106117 (2022)
Yel, G., Cattani, C., Baskonus, H.M., Gao, W.: On the complex simulations with dark-bright to the Hirota–Maccari system. J. Comput. Nonlinear Dyn. 16(6), 061005 (2021)
Yu, X., Kong, S.: Travelling wave solutions to the proximate equations for LWSW. Appl. Math. Nonlinear Sci. 6(1), 335–346 (2021)
Zhirong, G., Alghazzawi, D.M.: Optimal solution of fractional differential equations in solving the relief of college students mental obstacles. Appl. Math. Nonlinear Sci. 7(1), 353–360 (2021)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK). The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Akgül, A., Manzoor, S., Ashraf, F. et al. Exact solutions of the \((2+1)\)-dimensional Zoomeron model arising in nonlinear optics via mapping method. Opt Quant Electron 56, 1207 (2024). https://doi.org/10.1007/s11082-024-07075-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-024-07075-2