
Abstract
In this work, we investigate the solutions of the (2+1)-dimensional Bogoyavlenskii-Kadomtsev-Petviashvili (BKP) equation by three powerful analytical methods: the \(\exp _{a}\) function method, the \((\frac{G'}{G})\)-expansion method, and the Sine-Gordon expansion method. This equation describes the nonlinear wave propagation in many applications like waves of evolutionary shallow water, electrical networks, and engineering devices. Moreover, we study the solutions numerically via the finite difference method. We analyze the bifurcation of dynamical system resulting from the BKP equation. Finally, the majority of our solutions are displayed graphically to present the strength of imposed methods.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The importance of treatise the nonlinear differential equations that it present complicated phenomenons in different fields like: plasma physics, physical science, fluid mechanics, biology, ecology, chemistry, nonlinear optics, engineering technology, mathematical physics, waves in shallow water, optical fibers, nano-fibers, metamaterials, and others. Many researchers employed different techniques such as: Hirota’s bilinear method Hirota (2004), long wave limit technique Tan et al. (2018), the inverse scattering transformation method Ablowitz and Clarkon (1991), sine-cosine method Bekir (2008), the two variable \((\frac{G^{\prime }}{G},\frac{1}{G})\)-expansion methods Miah et al. (2019), modified kudryashov method Ali and Mehanna (2022), the extended tanh function method Ali et al. (2021), the improved F-expansion approach Almatrafi et al. (2021), and and recent techniques being used to find explicit solutions to different versions of nonlinear equations that are found in real-life applications such as Kudryashov-expansion method, updated rational sine-cosine method, updated rational sinh-cosh method, Cole-Hopf transformation, extended tanh-coth expansion, recent ansatze methods, extended sinh-Gordon equation expansion method, and Exp\((-\phi (\xi ))\)-expansion method Alquran (2022); Alquran and Alqawaqneh (2022); Ali et al. (2022); Alquran (2022); Alhami and Alquran (2022); Mathanaranjan (2022); Mathanaranjan and Vijayakumar (2022); Mathanaranjan et al. (2022); Mathanaranjan (2022); Mathanaranjan et al. (2021).
Our goal in this work is concerned with the solution of the (2+1)-dimensional BKP equation
Where, u(x, y, t) presents the wave amplitude. The BKP equation is assorted as the equation of BKP-I when \(\gamma =1\), and the equation of BKP-II when \(\gamma =-1\). The BKP Eq. (1) is a protraction of the Bogoyavlenskii-Schiff (BS) equation and the Kadomtsev-Petviashvili (KP) Eq. Estevez and Hernaez (2000), If \(\gamma =0\) then (1) can be converted to the Calogero-Bogoyavlenskii-Schiff (CBS) equation. The BKP Eq. (1) can be used to explain how nonlinear waves propagate in fluid, plasmas, biology, physics, and other scientific fields. The exact solutions have been covered in many literature using a variety of techniques: Wang et al. used Hermitian quadratic form and the bilinear structure Wang and Fang (2020), Wazwaz applied the Hirota’s direct method Wazwaz (2020), Cheng et al. constructed Wronskian determinant solutions Chenga et al. (2021), Wang et al. employed the bilinear representation and Grammian determinant Wang and Fang (2020), Rui et al. applied Hirota-s direct method and the KP hierarchy reduction method Rui and Zhang (2020), Wang et al. utilized the truncated Painlevé method and consistent Riccati expansion Wang and Fang (2017), Moretlo et al. employed the multiple exp-function algorithm and the modern group analysis method Moretlo et al. (2022), Khan utilized Lie analysis, the reduced differential equations were studied by: the new extended direct algebraic method and the tanh method Jhangeer et al. (2020), Zhao et al. used the polynomial function method Zhao et al. (2022), Wang et al. employed Taylor expansion approach and the perturbation method Wang and Fang (2019), Fang et al. utilized differential constraint technique and the binary Bell polynomials method Wang and Fang (2017), Fan et al. employed the bifurcation method Fan and Zhou (2018). In this work, we use three efficient analytical techniques, the first one is the \(\exp _{m}\) function method Method Ali et al. (2020); Hosseini et al. (2017, 2019), the second one is the \((\frac{G'}{G})\)-expansion method Nisar et al. (2022); Almusawa et al. (2021); Shehata et al. (2019); Akçagil and Aydemir (2016); Aminakbari et al. (2021) and the Sine-Gordon expansion method Ali and Mehanna (2021); Ali et al. (2020). We introduce a numerical solution using finite difference method Raslan and Ali (2020); ELDanaf et al. (2014); Raslan et al. (2022). We analyze the bifurcation of the traveling wave solutions of the BKP equation El-Labany et al. (2018); Saha et al. (2021); Karakoca et al. (2023).
Our work is streaked as: we demonstrate the main steps of the present methods in Sect. 2. We exhibit the application of the suggested methods in Sect. 3. We present some graphs to illustrate our solutions in Sect. 4. The numerical solution is presented in Sect. 5 using the finite difference method. We study the bifurcation analysis in Sect. 6. Lastly, in Sect. 7, we give a compact conclusion.
2 A Summary for the proposed methods
2.1 The \(\exp _{m}\)-function method
Assume that we have the following nonlinear PDF
where, \(u=u(x,y,t)\) is an unknown function to be determined, F is a polynomial in u and its first and higher order partial derivatives.
- Step 1::
-
Employing the traveling wave transformation to the PDE switch the PDE to an ODE
$$\begin{aligned} u(x,y,t)=u(\eta ),\,\ \eta =ax+by-ct \end{aligned}$$(3)where a, b are arbitrary constants and c is the wave speed. Inserting (3) into (2), we get the following ODE:
$$\begin{aligned} H(u^{\prime },u^{\prime \prime },u^{\prime \prime \prime },u^{\prime \prime \prime \prime },...)=0, \end{aligned}$$(4)where H is a polynomial in \(u(\eta )\) and its derivatives.
- Step 2::
-
Suppose that the solution of (4) is presented by the next form:
$$\begin{aligned} u(\eta )=\frac{A_{0}+A_{1}m^{\eta }+\cdots +A_{N}m^{N\eta }}{B_{0}+B_{1}m^{\eta }+\cdots +B_{N} m^{N \eta }}, \end{aligned}$$(5)where \(A_{\texttt{i}}\) and \(B_{\texttt{i}}\) \((0 \le i \le N)\) are constants to be evaluated, N is a positive integer.
- Step 3::
-
By balancing the term with the highest order derivative and the highest power nonlinear term in (4), we determine the positive integer N.
- Step 4::
-
Substituting (5) into (4), we obtain the next polynomial
$$\begin{aligned} R(m^{\eta })=p_{0}+p_{1}m^{\eta }+\cdots +p_{r}m^{r\eta }=0. \end{aligned}$$(6)Putting the coefficients \(p_{j}(0\leqslant j\leqslant r)\) equal to zero. We get a system of nonlinear algebraic equations which can be solved by using Mathematica program to achieve the solution of Eq. (1).
2.2 The \((\frac{G'}{G})\)-expansion method
The \((\frac{G'}{G})\)-expansion method is given by the following steps:
- Step 1::
-
Assume that the solution of Eq. (4), is presented by:
$$\begin{aligned} u(\eta )=\sum _{\texttt{i}=0}^N f_{\texttt{i}}(\frac{G'}{G})^{i}, \end{aligned}$$(7)where \(G=G(\eta )\) fulfill the next linear ODE:
$$\begin{aligned} G''(\eta )+\lambda G'(\eta )+\mu G(\eta )=0, \end{aligned}$$(8)where \(f_{\texttt{i}}(i=0,1,2,...,N),b_N\ne 0, \lambda\) and \(\mu\), are constants to be studied.
- Step 2::
-
The positive integer N is calculated as mentioned before by the homogeneous balance technique.
- Step 3::
-
Here, we present three groups of solutions for (8): Group 1: Hyperbolic function solutions, when \(\lambda ^{2}-4 \mu >0,\)
$$\begin{aligned} \frac{G'}{G}=\frac{-\lambda }{2}+\frac{1}{2}\sqrt{\lambda ^{2}-4\mu }\frac{h_{1}\sinh (\frac{1}{2}\sqrt{\lambda ^{2}-4\mu }\eta )+h_{2}\cosh (\frac{1}{2}\sqrt{\lambda ^{2}-4\mu }\eta )}{h_{1}\cosh (\frac{1}{2}\sqrt{\lambda ^{2}-4\mu }\eta )+h_{2}\sinh (\frac{1}{2}\sqrt{\lambda ^{2}-4\mu }\eta )}. \end{aligned}$$(9)Group 2: Trigonometric function solutions, when \(\lambda ^{2}-4 \mu <0,\)
$$\begin{aligned} \frac{G'}{G}=\frac{-\lambda }{2}+\frac{1}{2}\sqrt{4\mu -\lambda ^{2}}\frac{-h_{1}\sin (\frac{1}{2}\sqrt{4\mu -\lambda ^{2}}\eta )+h_{2}\cos (\frac{1}{2}\sqrt{4\mu -\lambda ^{2}}\eta )}{h_{1}\cos (\frac{1}{2}\sqrt{4\mu -\lambda ^{2}}\eta )+h_{2}\sin (\frac{1}{2}\sqrt{4\mu -\lambda ^{2}}\eta )}. \end{aligned}$$(10)Group 3: Rational function solutions, when \(\lambda ^{2}-4 \mu =0,\)
$$\begin{aligned} \frac{G'}{G}=\frac{-\lambda }{2}+\frac{h_{2}}{h_{1}+h_{2}\eta }. \end{aligned}$$(11) - Step 4::
-
Replacing (7) with (8) into (4), then gathering all terms with the same powers of \((\frac{G'}{G})\) and equaling their coefficients to zero, we achieve a set of equations can be solved by using Mathematica program to obtain the exact solution of equation (1).
2.3 The sine-Gordon expansion method(SGEM)
The sine-Gordon equation:
where m is a constant and \(u=u(x,t)\). Suppose that the wave transformation \(u(x,t)=U(\eta ), \eta =x-ct\) in (12) which converted to the nonlinear ODE:
where, \(U=U(\eta )\), \(\xi\) is the traveling waves amplitude and c is the traveling waves speed. By integrating (13) once and putting the integration constant equal zero, we obtain
let \(w(\xi )=\frac{U}{2}\) and \(a^{2}=\frac{m^{2}}{(1-c^{2})}\), so (14) becomes:
Set \(a=1\) in (15), we obtain:
The solution of (16), can be become as follow:
where p is non zero constant of integration.
It is presumed that the solution \(U(\eta )\) of (4) can be given as:
Computing the value of N by using the balance principle. Assuming that the coefficients of \(\sin ^{i}(w) \cos ^{i}(w)\) with like power are equal to zero, we acquire an algebraic system of equations that can be solved by Mathematica software.
3 Applications
Start by reducing the PDE (1) into the ODE via the wave transformation (3), we obtain:
Integrating twice with respect to \(\eta\)
Determine the value of N by Balancing \(u^{(3)}(\eta )\) with \(u^{\prime }(\eta )^{2}\) in (14), we obtain \(N+3=2(N+1)\), then \(N=1\).
3.1 Solutions via the \(\exp _{m}\)-function method
The solution of (22)is assumed to be:
Inserting (23) into (22) and setting the coefficients that have the same powers of \(m^{\eta }\) equal to zero, we acquire the nonlinear system:
We get the following set of solution, using (3) and (23):
3.2 Solutions via the \((\frac{G'}{G})\)-expansion method
Presenting the solution of (22) by:
inserting (26) into (22), gathering and putting the coefficients of terms that have the same power of \(\frac{G'}{G}\) equal to zero, we obtain the next set of equations:
The traveling wave solutions of (1) are presented by:
Group 1: Hyperbolic function solutions, when \(\lambda ^{2}-4 \mu >0,\)
Group 2: Trigonometric function solutions, when \(\lambda ^{2}-4 \mu <0,\)
Group 3: Rational function solutions, when \(\lambda ^{2}-4 \mu =0,\)
3.3 Solutions via the Sine-Gordon expansion method(SGEM)
Using (20), we introduce the solution of (22) by the next form:
substitute from (32) in (22), and putting the coefficients of trigonometric functions that have like powers equal to zero, we acquire the following algebraic set of equations:
By the help of mathematica program, we attain the following groups of solutions:
Group 1:
Group 2:
Group 3:
Group 4:
Group 5:
Group 6:
4 Graphical illustrations
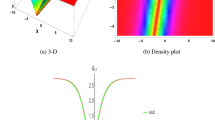
Hither, we graphically demonstrate our solutions (see Figs. 1, 2, 3, 4, 5, 6 and 7):

Kink solution plots of (25) by the \(\exp _{m}\)-function method when \(a=1, b=0.3, m=0.3,A_{0}=0.006, B_{0}=0.001, B_{1}=0.001\)

Kink solution plots of (29) by the \((\frac{G'}{G})\)-expansion method when \(a=1.4, b=0.9, f_{0}=0.1, h_{1}=7, h_{2}=0.6, \mu =0.4, \lambda =1.3\)

Cusp solution plots of (30) by the \((\frac{G'}{G})\)-expansion method when \(a=1.1, b=0.8, f_{0}=0.01, h_{1}=0.3, h_{2}=0.1, \mu =0.01, \lambda =0.1\)

Periodic solution plots of (34) by the Sine-Gordon expansion method when \(b=0.6, c=0.13, A_{0}=0.001\)

Periodic solution plots of (35) by the Sine-Gordon expansion method when \(b=0.6, c=0.14, A_{0}=0.1\)

Kink solution plots of (37) by the Sine-Gordon expansion method when \(b=0.3, c=0.2, A_{0}=0.4\)

Periodic solution plots of (38) by the Sine-Gordon expansion method when \(b=0.8, c=0.13, A_{0}=0.01\)
5 Numerical solutions
To solve the (2+1)-dimensional Bogoyavlenskii-Kadomtsev-Petviashvili Eq. (1) numerically by finite difference method, we impose \(x,y\in [\texttt{a},\texttt{b}]\) and divide this interval into sub-intervals with horizontal distance \(\texttt{h}=\frac{\texttt{b}-\texttt{a}}{\texttt{N}}=x_{\texttt{i}+1}-x_{\texttt{i}}, \texttt{i}=0,1,...,\texttt{N}\) and vertical distance \(\texttt{k}=\frac{\texttt{b}-\texttt{a}}{\texttt{M}}=y_{\texttt{j}+1}-y_{\texttt{j}}, \texttt{j}=0,1,...,\texttt{M}\) at time levels \(t_l=l\Delta {t}, l=0,1,...,\texttt{K}\) where \(\Delta {t}>0\) and \(\texttt{K}\) is +ve integer.
Put the governing conditions to solve Eq. (1)
We obtain the numerical solution \(\tilde{u}(x,y,t)\) equivalent to the exact solution u(x, y, t) by constructing finite difference scheme for Eq. (1)
where,
and its first and higher order partial derivatives
As before, we formulate system of difference equations as follows
can be solved using the conditions (40). We show the accuracy of the presented numerical scheme by calculating error norm
Table 1 presents error norms using \({L_2}\) and \({L_\infty }\) formulas (45) at different time levels and Fig. 8(a, b) display the numerical and exact solutions at time level \(t=0.5\) with step size \(\texttt{h}=\texttt{k}=1.0\) and \(\Delta {t}=0.01, 0.001\) for Eq. (25), respectively. Figure 9 shows the maximum absolute error at different time levels \(t=1, 3, 5\) using the analytical solution (25) with step size \(\texttt{h}=\texttt{k}=0.5\) and \(\Delta {t}=0.001\).
Table 2 exhibits \({L_2}\) and \({L_\infty }\) error norms at different time levels and Fig. 10(a, b) compare between the numerical and exact solutions at \(t=0.1\) with \(\texttt{h}=\texttt{k}=1.0, 0.5\) and \(\Delta {t}=0.01, 0.001\) for Eq. (29), respectively. The maximum absolute error at different time levels \(t=3, 5, 10\) appear as in Fig. 11 using the analytical solution (29) with \(\texttt{h}=\texttt{k}=1.0\) and \(\Delta {t}=0.001\).
Table 3 shows \({L_2}\) and \({L_\infty }\) at different time levels and Fig. 12(a, b) display the analytical and numerical solutions at time level \(t=0.5\) with \(\texttt{h}=\texttt{k}=1.0\) and \(\Delta {t}=0.01\) for Eqs. (37) and (39), respectively.





6 Bifurcation analysis
In this section, we discuss the bifurcation analysis of the (2+1)-dimensional BKP Eq. (1). For this analysis, we use the bifurcation theory Guckenheimer and Holmes (1983) and formulate equation (22) as a three-dimensional dynamical system as follows:
Let \(\textbf{F}=\left<f,g,\frac{\left( b^3+a^2c\right) f-6a^3b f^2}{a^4b}\right>\) is a vector field with \(\mathbf {\nabla }.\textbf{F}=\frac{\partial {u_{\eta }}}{\partial {u}}+\frac{\partial {f_{\eta }}}{\partial {f}}+\frac{\partial {g_{\eta }}}{\partial {g}}=0\), Then the dynamical system (46) is conservative. The dynamical system (46) with three parameters a, b, c has infinite equilibrium points \(p_{\texttt{i}}=(u_{\texttt{i}},0,0), i=1,2,...\) in the \(ufg-\) phase plane, where \(u_{\texttt{i}}\) arbitrary constant, it’s Jacobian matrix is as follows:
Then, the characteristic equation and eigenvalues of the system (46) are
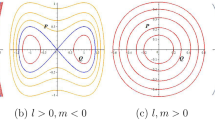
It obviously, from (49) that there is an eigenvalue \(\zeta _{1}=0\). Consequently, these equilibrium points are non-hyperbolic equilibrium points. When parameters \(a=1.0, b=0.3, c=0.4\) the phase plots of the dynamical system are attractors shaped like a wave in the 2D plot and are strange attractors in the 3D plot, as shown in Fig. 13.

2D and 3D Phase plots of the dynamical system (46) at \(a=1.0, b=0.3, c=0.4\)
7 Conclusion
In this work, we introduced new solutions for the (2+1)-dimensional BKP Eq. (1) which characterize the wave phenomena in scientific applications as fluid mechanics and others. The introduced solutions are gained by three powerful and simple analytical methods, namely: the \(\exp _{m}\)-function method, the \((\frac{G'}{G})\)-expansion method, the Sine-Gordon expansion method. Furthermore, we exhibited the acquired results graphically. We successfully attain solutions in different forms: trigonometric, exponential, hyperbolic, and rational functions which presented different types of waves as kink, cusp, and periodic wave solutions. The aforementioned results demonstrate that the suggested techniques are straightforward, effective, and good tools that give conclusive results when solving the proposed model and possibly be applied to different kinds of NPDE. We applied a numerical scheme via finite difference method of the BKP Eq. (1). Tables 1, 2, 3 and Figs. 8, 9, 10, 11, 12 showed efficiency and accuracy of the imposed numerical scheme and compatible it with the corresponding analytical solutions. We analyzed the traveling wave solutions of the dynamical system (46) consisting of the BKP equation (1) and found all equilibrium points are nonhyperbolic equilibrium points. In future work, we will be concerned about searching for other types of wave solutions to the presented BKP equation (1) by trying other analytical and numerical techniques.
Data Availability
Data sharing is not applicable to this article as no data sets were generated or analyzed during the current study.
References
Ablowitz, M.J., Clarkon, P.A.: Solitons. Nonlinear Evolution and Inverse Scattering. Cambridge University Press, Cambridge (1991)
Akçagil, S., Aydemir, T.: Comparison between the \((\frac{G^{\prime }}{G})\)-expansion method and the modified extended tanh method. Open Phys. 14, 88–94 (2016)
Alhami, R., Alquran, M.: Extracted different types of optical lumps and breathers to the new generalized stochastic potential-KdV equation via using the Cole-Hopf transformation and Hirota bilinear method. Opt. Q. Electr. 54(9), 553 (2022)
Ali, K.K., Mehanna, M.S.: Computational and analytical solutions to modified Zakharov–Kuznetsov model with stability analysis via efficient techniques. Opt. Quant. Electr. 53(12), 723 (2021)
Ali, K.K., Mehanna, M.S.: On some new analytical solutions to the (2+ 1)-dimensional nonlinear electrical transmission line model. Eur. Phys. J. Plus 137(2), 1–12 (2022)
Ali, K.K., Wazwaz, A.M., Mehanna, M.S., Osman, M.S.: On short-range pulse propagation described by (2+ 1)-dimensional Schrodinger’s hyperbolic equation in nonlinear optical fibers. Physica Scripta 95(7), 075203 (2020)
Ali, K.K., Wazwaz, A.M., Osman, M.S.: Optical soliton solutions to the generalized nonautonomous nonlinear Schrodinger equations in optical fibers via the sine-Gordon expansion method. Optik 208, 164132 (2020)
Ali, K.K., Mehanna, M.S., Wazwaz, A.M.: Analytical and numerical treatment to the (2+ 1)-dimensional Date-Jimbo-Kashiwara-Miwa equation. Nonlinear Eng. 10(1), 187–200 (2021)
Ali, M., Alquran, M., Salman, O.B.: A variety of new periodic solutions to the damped (2+ 1)-dimensional Schrodinger equation via the novel modified rational sine-cosine functions and the extended tanh-coth expansion methods. Res. Phys. 37, 105462 (2022)
Almatrafi, M.B., Alharbi, A.R., Seadawy, A.R.: Structure of analytical and numerical wave solutions for the Ito integro-differential equation arising in shallow water waves. J. King Saud Univ. Sci. 33(3), 101375 (2021)
Almusawa, H., Ali, Khalid K., Abdul-Majid Wazwaz, M.S., Mehanna, D. Baleanu., Osman, M.S.: Protracted study on a real physical phenomenon generated by media inhomogeneities. Res. Phys. 31, 104933 (2021)
Alquran, M.: New symmetric bidirectional progressive surface-wave solutions to a generalized fourth-order nonlinear partial differential equation involving second-order time-derivative. J. Ocean Eng. Sci. (2022). https://doi.org/10.1016/j.joes.2022.06.021
Alquran, M.: New interesting optical solutions to the quadratic-cubic Schrodinger equation by using the Kudryasho-expansion method and the updated rational sine-cosine functions. Opt. Q. Electr. 54(10), 666 (2022)
Alquran, M., Alqawaqneh, A.: New bidirectional wave solutions with different physical structures to the complex coupled Higgs model via recent ansatze methods: applications in plasma physics and nonlinear optics. Opt. Q. Electr. 54(5), 301 (2022)
Aminakbari, N., Gu, Y., Yuan, W.: Bernoulli\((\frac{G^{\prime }}{G})\)-expansion method for nonlinear Schrödinger equation under efect of constant potential. Opt. Quant. Electron. 53, 331 (2021)
Bekir, A.: New solitons and periodic wave solutions for some nonlinear physical models by using the sine-cosine method. Phys. Scr. 77, 4 (2008)
Chenga, L., Zhangb, Y., Mab, W.X., Ge, J.Y.: Wronskian and lump wave solutions to an extended second KP equation. Math. Comput. Simul. 187, 720–731 (2021)
ELDanaf, T.S., Raslan, K.R., Ali, Khalid K.: New Numerical treatment for the Generalized Regularized Long Wave Equation based on finite difference scheme. Int. J. of S. Comp. and Eng. (IJSCE) 4, 16–24 (2014)
El-Labany, S.K., El-Taibany, W.F., Atteya, A.: Bifurcation analysis for ion acoustic waves in a strongly coupled plasma including trapped electrons. Phys. Lett. A 382(6), 412–419 (2018)
Estevez, P.G., Hernaez, G.A.: Non-isospectral problem in (2+1) dimensions. J. Phys. A Math. Gen. 33(10), 2131–2143 (2000)
Fan, F., Zhou, Y.: Bifurcation of Traveling Wave Solutions for the Bogoyavlenskii- KadomtsevPetviashvili Equation. Scholars J. Phys. Math. Stat. 5, 282–290 (2018)
Guckenheimer, J., Holmes, P.J.: Nonlinear Oscillations. Dynamical Systems and Bifurcations of Vector Fields. Springer, New York (1983)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, New York (2004)
Hosseini, K., Ayati, Z., Ansari, R.: New exact solutions of the Tzitzeica-type equations in non-linear optics using the exp a function method. J. Mod. Opt. 65(7), 847–851 (2018)
Hosseini, K., Ansari, R., Samadani, F., Zabihi, A., Shafaroody, A., Mirzazadeh, M.: High-order dispersive cubic-quintic Schrodinger equation and its exact solutions. Acta Phys. Pol. A 136(1), 203–207 (2019)
Jhangeer, A., Hussain, A., Junaid-U-Rehman, M., Khan, I., Baleanu, D., Nisar, K.S.: Lie analysis, conservation laws and travelling wave structures of nonlinear Bogoyavlenskii-Kadomtsev-Petviashvili equation. Res. Phys. 19, 103492 (2020)
Karakoca, S.B.G., Sahab, A., Sucu, D.Y.: A collocation algorithm based on septic B-splines and bifurcation of traveling waves for Sawada-Kotera equation. Math. Comput. Simul. 203, 12–27 (2023)
Mathanaranjan, T.: An effective technique for the conformable space-time fractional cubic-quartic nonlinear Schrödinger equation with different laws of nonlinearity. Comput. Methods Differ. Equ. 10(3), 701–715 (2022)
Mathanaranjan, T.: New optical solitons and modulation instability analysis of generalized coupled nonlinear Schrödinger-KdV System. Opt. Quant. Electron. 54(6), 336 (2022)
Mathanaranjan, T., Vijayakumar, D.: New soliton solutions in Nano-Fibers with space-time fractional New derivatives. Fractals 30(7), 1–10 (2022)
Mathanaranjan, T., Rezazadeh, H., Enol, M., Akinyemi, L.: Optical singular and dark solitons to the nonlinear Schrödinger equation in magneto-optic waveguides with anti-cubic nonlinearity. Opt. Quant. Electron. 53(12), 1–16 (2021)
Mathanaranjan, T., Kumar, D., Rezazadeh, H., Akinyemi, L.: Optical solitons in metamaterials with third and fourth order dispersions. Opt. Quant. Electron. 54(5), 1–15 (2022)
Miah, M.M., Ali, H.M.S., Akbar, M.A., Seadawy, Aly R.: New applications of the two variable\((\frac{G^{\prime }}{G},\frac{1}{G})\)-expansion method for closed form traveling wave solutions of integro-differential equations. J. Ocean Eng. Sci. 4, 132–143 (2019)
Moretlo, T.S., Adem, A.R., Muatjetjeja, B.: A generalized (1+ 2)-dimensional Bogoyavlenski–Kadomtse–Petviashvili (BKP) equation: multiple exp-function algorithm; conservation laws; similarity solutions. Commun. Nonlinear Sci. Numer. Simul. 106, 106072 (2022)
Nisar, K.S., Ali, Khalid K., Inc, M., Mehanna, M.S., Rezazadeh, H., Akinyemi, L.: New solutions for the generalized resonant nonlinear Schrödinger equation. Res. Phys. 33, 105153 (2022)
Raslan, K.R., Ali, Khalid K.: Numerical study of MHD-duct flow using the two-dimensional finite difference method. Appl. Math. Inf. Sci. 14, 1–5 (2020)
Raslan, K.R., Ali, K., Al-Jeaid, H.K., Shaalan, M.A.: Bi-finite difference method to solve second-order nonlinear hyperbolic telegraph equation in two dimensions. Math. Prob. Eng. (2022). https://doi.org/10.1155/2022/1782229
Rui, W., Zhang, Y.: Soliton and lump-soliton solutions in the Grammian form for the Bogoyavlenskii-Kadomtsev-Petviashvili equation. Adv. Differ. Equ. 2020(1), 1–12 (2020)
Saha, A., Ali, Khalid K., Rezazadeh, H., Ghatani, Y.: Analytical optical pulses and bifurcation analysis for the traveling optical pulses of the hyperbolic nonlinear Schrödinger equation. Opt. Quant. Electron. 53, 150 (2021)
Shehata, A.R., Abdel Basser, F., Abu-amra, S.S.M.: Exact solutions for some nonlinear partial differential equations by a variation of \((\frac{G^{\prime }}{G})\)-expansion method. J. Mod. Res. 1, 8–12 (2019)
Tan, W., Dai, Z.D., Xie, J., Qiu, D.: Parameter limit method and its application in the (4+1)-dimensional Fokas equation. Comput. Math. Appl. 75, 4214–4220 (2018)
Wang, C., Fang, H.: Non-auto Baclund transformation, nonlocal symmetry and CRE solvability for the Bogoyavlenskii-Kadomtsev-Petviashvili equation. Comput. Math. Appl. 74(12), 3296–3302 (2017)
Wang, C., Fang, H.: Bilinear Backlund transformations, kink periodic solitary wave and lump wave solutions of the Bogoyavlenskii-Kadomtsev-Petviashvili equation. Comput. Math. Appl. 76(1), 1–10 (2018)
Wang, C., Fang, H.: Lump-Type Wave and Interaction Solutions of the Bogoyavlenskii-Kaddomtsev–Petviashvili Equation. Complexity (2020). https://doi.org/10.1155/2020/2476923
Wang, C., Fang, H.: General high-order localized waves to the Bogoyavlenskii–Kadomtsev–Petviashvili equation. Nonlinear Dyn. 100(1), 583–599 (2020)
Wang, C., Fang, H.: Various kinds of high-order solitons to the Bogoyavlenskii-Kadomtsev-Petviashvili equation. Phys. Scripta 95(3), 035205 (2020)
Wazwaz, Abdul-Majid.: On integrability of an extended Bogoyavlenskii-Kadomtsev Petviashvili equation: multiple soliton solutions. Int. J. Numer. Model. Electron. Networks Devices Fields 34, 1 (2020)
Zhao, Z., Yue, J., He, L.: New type of multiple lump and rogue wave solutions of the (2+ 1)-dimensional Bogoyavlenskii-Kadomtsev-Petviashvili equation. Appl. Math. Lett. 133, 108294 (2022)
Acknowledgements
The author thank the editor-in-chief of the journal and all those in charge of it.
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). There is no funding.
Author information
Authors and Affiliations
Contributions
If we look at the contribution of each author in this paper, we will find that each of them participated in the work from beginning to end in equal measure.
Corresponding author
Ethics declarations
Conflict of interest
There is no conflict of interest between the author or anyone else regarding this manuscript.
Consent for publication
The paper has one author who agrees to publish.
Ethics approval
The author confirm that all the results they obtained are new and there is no conflict of interest with anyone.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ali, K.K., Mehanna, M.S. & Shaalan, M.A. Investigation of the analytical and numerical solutions with bifurcation analysis for the (2+1)-dimensional Bogoyavlenskii-Kadomtsev-Petviashvili equation. Opt Quant Electron 55, 585 (2023). https://doi.org/10.1007/s11082-023-04848-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-04848-z