
Abstract
In this paper, we suppose an underwater optical wireless communication (UOWC) system, where the communication utilizes visible light communication for its advantages as wide spectrum, high data rate and high accuracy. The novelty of this paper is focused on improving the channel estimation between transmitter and receiver, where using Kalman Filter (KF) for channel estimation in UOWCs achieves the best results as compared to other traditional channel estimation methods. The scenario of this paper is summarized in transmitting data from transmitter to receiver via underwater harbor and coastal channels. Two channel models are utilized: weighted double gamma functions (WDGF) and a combination of exponential and arbitrary power function (CEAPF). The modulation technique used is optical orthogonal frequency division multiplexing with two kinds: direct current optical orthogonal frequency division multiplexing (DCO-OFDM) and asymmetrically clipping optical orthogonal frequency division multiplexing (ACO-OFDM). Three different techniques are used for channel estimation: Least Square (LS), minimum mean square error (MMSE), and KF. The simulation results reveal that the ACO-OFDM modulation technique with CEAPF channel modeling using KF achieves the lowest bit error rate (BER) compared to other channel estimation methods. The improvement percentage at BER = 10−1 is 13.3% for ACO-OFDM over DCO-OFDM with CEAPF in coastal water and is is 9.3% for WDGF. This indicates that CEAPF performs about 4% better than WDGF for ACO-OFDM than DCO-OFDM in terms of channel estimation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The acoustic technologies that are used in several applications don’t support the required underwater systems because of their limited spectrum, high delay, and low simplicity. Also, radio frequency (RF) cannot be used underwater because of high attenuation and short range (Mapunda et al. 2020). VLC has different advantages in communication systems as high efficiency, safety, security, and possibility for underwater communications. Additionally, VLC has recently been seen as a possible low-cost, high-energy alternative that can deliver high rates across short transmission distances (Hessien et al. 2018). Simple light emitting diodes (LEDs) and photodetectors (PDs) can be used in underwater devices' illumination systems to combine VLC with them (Zeng et al. 2017), (Kashef et al. 2016), (Anous et al. 2016). However, due to strong absorption, scattering, temperature variations, and water turbidity, it requires line-of-sight (LoS) location and has a limited communication range compared to acoustic systems (Zeng et al. 2017), (Kashef et al. 2016). To extend the communication range, there are different solutions like multi-input multi-output (MIMO) transmission, equalizer design and multiple symbol detection (Jamali et al. 2017a, b), (Zhang and Dong 2016), (Celik et al. 2018), (Jamali et al. 2018). For enhance the performance of the LED in VLC, we should use multiplexing modulation for multi- LEDs.
For instance, a modem for optical underwater system has been designed in (Cossu et al. 2018) applying a 440 nm LED array of 7 chips providing 10 Mbps signal of Manchester-coded up to 10 m link. In (Wang et al. 2016), the authors have enhanced a high range UVLC system using binary digits with a data rate of 100 Mbps over 110 m. In (Akram et al. 2017), (Munaweera et al. 2017), MIMO methods have been utilized to UVLC systems using number of LEDs, but less than 1 m links were implemented with tiny performance and poor data rates.
The authors in (Zang et al. 2018), (Alkhasraji et al. 2017) have introduced OFDM techniques to the designed systems. Specifically, in (Zang et al. 2018), a direct current biased optical-OFDM (DCO-OFDM has been used with a BER of 10−4 using 16-QAM. Coded-OFDM over short distance VLC has been supposed in (Alkhasraji et al. 2017), supporting a data rate of 1 Mbps at a BER of 10−4. Underwater optical communication system is hard task because high attenuation by the optical beam (Ehiremen et al. 2020).
In (Xu et al. 2018), the proposed channel estimation underwater system at BER = 10−2 get the improvement than LS method, where SNR = 20 dB. By comparing our system with the same parameters of (Xu et al. 2018) can detected that the SNR in our proposal achieves for ACO-OFDM, CEAPF with KF better result than (Xu et al. 2018) where at BER = 10−2, SNR = 18 dB with improvement by nearly 10%. In (Eman et al. 2018), there is a same comparison between ACO-OFDM and DCO-OFDM for indoor optical channel for three estimators KF, MMSE and LS. The difference between this reference and our proposal is the optical transmission meduim, where in (Eman et al. 2018), the meduim is air while the meduim in our work is underwater. In (Eman et al. 2018), ACO-OFDM outperforms DCO-OFDM for M = 128 when using KF by about 11.4%, while in this paper, ACO-OFDM achieves improvement over DCO-OFDM between 9.3 and 13.3% related to the channel modeling used. In (Wang et al. 2016), the authors used OFDM in the acoustic underwater transmission channel with QPSK modulation technique. The reference used channel super-resolution neural network (CSRNet) to improve the channel estimation over LS.
In (Asha et al. 2021), authors used OFDM underwater channel estimation with QAM modulation techniques. Orthogonal matching pursuit (OMP) has been tested using fixed point algorithms, FPGA approach, experimental tests, and simulation studies. Channel estimation in the underwater optical wireless communication system has importance in the research for recent years.
The objective of our work is to improve the performance of channel estimation by detracting the BER in the underwater optical communication system. Matlab simulation is used for a box of water. We solved this challenge of channel estimation enhancement by using several techniques in different types of water through two different channel models: WDGF and CEAPF. The modulation techniques used are DCO-OFDM, ACO- OFDM with different channel estimators; LS, MMSE, KF algorithm. Studying this collection of techniques and comparing their performances has not been studied before (to the best of our knowledge) and the aim of paper is to enhance the performance by choosing the best technique that achieves the best results. The importance of this work is clear, where different applications use underwater optical systems as diving programs, detecting petroleum, and military applications. So, this study is able to determine the best possible system for the development of the communication system in these applications.
The format of this essay is as follows. First, the related work section discusses different studies and authors’ contributions in this field. Section 2 illustrates the optical channel which shows the general characteristics for underwater system and a comparison between different types of water. The modulation techniques are explained in Sect. 3 in details for both of DCO-OFDM and ACO-OFDM. Section 4 demonstrates the system model, showing general feature of the system. After that, in Sect. 5, both WDGF and CEAPF models are discussed to get the response of the channel, impulse response. The KF algorithm is explained in Sect. 6 to be applied. Simulation analysis and corresponding results are displayed and discusses in Sect. 7. Section 8 is devoted to the main conclusion.
2 Optical channel
The two main elements that influence light propagation in water are absorption and scattering, both of which depend on the operating wavelength, λ. The primary intrinsic optical feature to represent water absorption is the absorption coefficient a(λ).
Scattering, b(λ), means deflection of light from particles or by particulate matters. The total of a(λ) and b(λ), which varies depending on the different water depths and types, is the attenuation coefficient, or c(λ).
The coefficients a(λ), b(λ), and c(λ) are all expressed in m−1.
There are different types of water. Each type has its characteristics as follows.
2.1 Pure sea water as deep ocean
The important factor is the absorption, and the scattering angle directs the propagation beams as straight lines.
2.2 Clear ocean water
The main factor is the scattering due to the large number of small particles that have been dissolved in the water and have a huge effect on the propagation beams.
2.3 Coastal ocean water
It has a high concentration of plank tonic matters and mineral components that affect attenuation.
2.4 Turbid harbor and estuary water
They have a high amount of matter which is dissolved and has effects on the propagation.
Table 1 demonstrates the values of a, b, and c parameters associated with these water types.
Four factors of absorption are assumed to express the absorption coefficient in underwater (Priyalakshmi and Mahalakshmi 2020).
The absorption in sea water is symbolized by the symbol aw(λ). The absorption caused by Chromophoric dissolved organic matter (CDOM) known as aCDOM(λ) and phytoplankton a as aphy(λ). adet(λ) represents the absorption due to detritus. The intensity of the received signal is decreased depending on scattering effects. It is dependent on wavelength and the number of different particles in the underwater.
Here the scattering parameter related to CDOM is expressed as bCDOM(λ), while the scattering due to phytoplankton is written as bphy(λ). The scattering coefficients for clean sea water and debris are bw(λ) and bdet(λ), respectively.
3 Modulation techniques
3.1 DCO-OFDM modulation technique
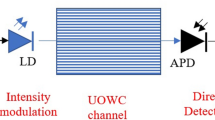
DCO-OFDM is a subset of the OFDM modulation technique that depends on adding a bias to the signal and thus canceling the negative part. This section introduces the DCO-OFDM system structure, as shown in Fig. 1. The Multi-level Quadrature Amplitude Modulation (M-QAM) modulator converts the input bit stream into complex symbols, where M is the constellation size. The symbols are distributed to N sub-carriers. Utilizing a Hermitian symmetry (HS) by the complex signal, where it is imposed on the sub-carriers which are used to obtain a real-valued time domain signal. Thus, the signals of DCO-OFDM after HS are given as the following (Eman et al. 2018).
where X0 = XN/2 = 0 and X∗ denotes the conjugate of the X.

General block diagram of channel estimation for UWOC-VLC system
Then, the input signal is connected into the inverse fast Fourier transform (IFFT). Due to using HS, the output signal of the IFFT, X, is real and given by
After that, a cyclic prefix is added, acting as a guard band between succeeding characters to prevent inter-symbol interference (ISI), a type of signal distortion in which one symbol interferes with succeeding signals. Using the CP is important for enabling the OFDM signal to operate reliably.
To obtain non-negative signals, data is added to a direct-current (DC) bias voltage. A scheme adds a DC offset value to achieve this. This particular type of OFDM system is known as DC offset OFDM (DCO-OFDM), which positions with respect to the signal x (n), the offset value \(B_{DC} = \mu \sqrt {\left( {E\left[ {x\left( n \right)} \right]^{2} } \right)}\), where \(E\left[ {x\left( n \right)} \right]^{2}\) is an expected value of a signal and is defined as a bias of 10 log10 (μ2 + 1) dB, where μ is a proportionality constant. The noise is reduced by using a higher bias. Also, the BER to be accepted, we should increase bit electrical energy normalized to the noise power spectral density. At the receiver, one can express the received signal in time domain as follows.
where the convolution operator is ⊛, y(t) is the received signal, h(t) is the channel impulse response (CIR), and w(t) is the noise, in the time domain.
The channel, h, in VLC may have a line-of-sight (LoS) or non-line-of-sight effect (NLoS). The transmitted power signal should be real and positive. At the receiver, one can express the received signal in frequency domain as
where Y is a frequency-domain signal that has been received, X is a frequency-domain signal that has been transmitted, H is a frequency-domain channel response, and W is a frequency-domain noise signal.
The photodetector (PD) at the receiver detects the signal directly (DD). After removing the CP, the received data are Fourier processed, demodulated, and then restored to their original form. The channel estimation block is located after removing the CP block, where the estimated channel response is used into the FFT step to develop the performance of the system and decrease the BER as shown in the simulation section. The clipped signal, xc(n), can be defined as
where \(x\left( n \right) + bias\) > 0, and X (n) is the analog OFDM signal. The choice of bias determines the performance of O-OFDM.
According to (Carruthers et al. 2000), it is enough to use 7 dB level of the clipping in case used 4 QAM format, and 9 dB level for using 64 QAM format. The clipped signal is transmitted through LED and the signal be collected by photo detector (PD) which obtain the electric signal from the optical intensity signal with the additive white Gaussian noise (AWGN). After removing DC bias and CP, the detected OFDM symbols are gained by the FFT. Finally, the QAM symbols are decoded to get the bit stream.
3.2 ACO-OFDM system
The asymmetrically Clipped Optical OFDM (ACO-OFDM) can be used in IM/DD systems to get non-negative signals. The principle of ACO-OFDM depends on skipping the even sub-carriers of an OFDM frame and loading only the odd sub-carriers with useful information. This creates an asymmetry OFDM signal, that doesn’t need any DC bias where, only odd sub-carriers are used after the FFT on the frame. The HS is imposed on the sub-carriers to obtain a real signal. Thus, the frequency domain signals of ACO-OFDM after using HS are given as (Acolatse et al. 2011), (Chen et al. 2006).
where N is the number of sub-carriers and Xn(0 ≤ n ≤ N/2) is the complex valued symbol on the nth sub-carrier. The time-domain signal xn would be obtained after IFFT, as given in Eq. (5)
and \(X_{n}\) has anti-symmetry property as
Then, the signal is clipped to zero levels without insert noise and without losing information (Proakis et al.2022). In this system, the optical power is decreased and carries useful information on half bandwidth. Using the Fourier transformation properties on the frequency domain input OFDM frames will result in a true unipolar OFDM waveform.
4 System model
The block representation of UWOC is shown in Fig. 1. It is assumed that channel loss is primarily controlled by both absorption and scattering. The system's overall capacity is increased by the adoption of M-ary QAM (M-QAM) modulation. The OFDM has high efficiency, thus, the M-QAM modulation is utilized and IFFT techniques is used. Hence, the DCO-OFDM added a direct current with the transmitted bits. Consequently, depending on the LoS path, the modulation output is delivered via undersea channel where, we neglect study NLoS because it has very low received power.
On the receiver side, direct current is eliminated and the FFT is used. Demodulation and decoding are fundamentally steps that follow the channel estimate process to obtain the original transmission signal. LED and PD are utilized as transmitter and receiver, respectively. The OFDM symbol is applied, where the CP is fully identified and cancelled. After FFT, the pilot symbols are collected utilizing the channel estimation process.
Our proposal makes the assumption that there is an AWGN at the receiver, and that the effects of background radiation, shot noise, dark current, and thermal noise are all present in the received noise as
where the variance of the noise for empty and pulse slots, respectively, is represented by \(\sigma_{0}^{2}\) and \(\sigma_{1}^{2}\). The variations of background radiation, dark current, thermal noise, and shot noise are, respectively, \(\sigma_{b}^{2} , \sigma_{d}^{2} , \sigma_{t}^{2}\) and \(\sigma_{s}^{2}\).
5 Impulse response modeling
To simulate our proposal, we should take some of the realistic conditions of a practical UVLC scenario into account. As a first approximation, and as a starting point, we ignore some of the conditions as mobile users, reflections from the sea surface for simplicity, which will be considered in a future work.
The authors in (Tang et al. 2014) modelled the channel based on the impulse response in clouds. To predict the CIR based on the characteristics of clouds, WDGF was proposed in (Tang et al. 2014). The CIR expression as a function of time, t, is thus given by
where \(C_{1}\), \(C_{2}\), \(C_{3}\), and \(C_{4}\) are the four parameters to be found through Monte-Carlo simulations. At the same time, a new function model based on CEAPF was recently proposed in (Yiming et al. 2018) as follows
where \(C_{1}\) > 0, \(C_{2}\) > 0, α > − 1 and β > 0 are the four searchable parameters, and v is the water-bound speed of light. The nonlinear least squares criterion is used in Monte-Carlo simulation to calculate these values. In addition, the channel path loss is not considered. The CEAPF and WDGF characteristics for various UOWC channels are listed in Tables 2 and 3 (Tang et al. 2014).
6 Channel estimation
6.1 Channel estimation techniques
The frequency domain for techniques of channel estimation define some symbols called pilots at certain positions in the OFDM symbol grid. Those pilots are organized in a regular way as comb- type and block-type (Coleri et al. 2002) or 2D-grid type (Ting et al. 2005). To estimate a frequency selective Rayleigh fading channel for OFDM systems, an EM-based iterative algorithm is enhanced in (X. Ma et al. 2001). The algorithm supports an initial estimation of CIR within the pilot symbols. The initial CIR estimation is iterated utilizing an E-step and a Q-step to get the final CIR. The algorithm outperforms a near-optimal CIR estimation with a little number of iterations. An EM technique with low complexity is developed in (Jain et al. 2006), and a sparse Bayesian learning (SBL) algorithm is used in (Prasad et al. 2010); the perfect synchronization is supposed between the transmitter and receiver. Imperfect timing or frequency synchronization results in a reduction in the BER performance for channel estimation technique. Timing synchronization could be achieved by utilizing the structure of CP (Sheng et al. 2014).
6.2 General algorithm for KF
To find the LoS component, one uses the estimates that were obtained. An auto-regressive (AR) process described in state-space form is used to model the channel. The AR models use a combination of past values of the variable. To increase the accuracy of the estimation, the proposed technique is based on the KF concept.
The channel coefficients hk of the channel can be represented using the dynamic AR process as follows: Given the matrix Xk of known transmitted pilot symbols and received signal yk at symbol k, the KF can be described as follows
where \(v_{k,n}\) signifies a Gaussian white noise and \(\upalpha_{n}\) denotes the channel response time correlation between the kth and (k + 1)th OFDM symbols at the nth sub-carrier.
First, consider an AR model, where the response of the channel can be expressed as sate x as (Yusuf et al. 2019):
Step for prediction: Calculating the projected state
Formula of measurement
Predicted estimate covariance
Kalman gain calculation as a step in the update
Updated estimate with measurement (zk)
Updated the error covariance
where Pk stands for the error covariance matrix, which is a gauge of the state estimate's estimated correctness, and Xk stands for the state estimate at (k). The state transition models are represented by Ak and Hk, respectively. The covariance of the process noise and the observation noise are denoted by Qk and Rk, respectively.
7 Simulation results
Here, simulation results for the suggested channel estimation system employing the KF are provided and contrasted with those of conventional methods for LS and MMSE for different types of optical modeling channels: WDGF and CEAPF. Using Matlab simulations, we obtain our results, where Table 4 shows the different simulation parameters used in this research.
The scenario under consideration is planned as follows.
-
1.
The simulation is performed to transmit and receive the light in a box of water to create the same nature in underwater.
-
2.
Four transmitters and one receiver are used in this box to simulate the process.
-
3.
The used parameters are specified to be utilized in the simulation.
-
4.
All the transmitters transmit the same data and one user receive this data which is affected by the channel response.
-
5.
The channel models used are WDGF and CEAPF to determine the channel response under these conditions.
-
6.
Different channel estimation (LS, MMSE and KF) are used to estimate the underwater channel.
-
7.
Both WDGF and CEAPF have different results for same conditions.
Figure 2 shows the comparison between the different types of channel estimation methods (LS, MMSE and KF) for the coastal water with (a) FoV = 20°, (b) FoV = 180°, for both modeling channels and using DCO-OFDM modulation technique.

Coastal water with different methods of channel estimation: a FoV = 20°, b FoV = 180°
Using CEAPF channel modeling achieves better results than WDGF and using the KF channel estimation method which increases the accuracy and decreases the bit error rate than other channel estimation methods LS and MMSE. In Fig. 2.a, the simulation is calculated for M = 128 and FoV = 20°. Clearly, at for BER = 10−2 and using KF and CEAPF, the KF achieves SNR of 20 dB while MMSE and LS achieve SNR of 23.5 and 24.5 dB, respectively. Also, for WDGF at BER = 10−1, KF outperforms both MMSE and LS, where KF achieves SNR of 16 dB while MMSE and LS achieve SNR of 17.5 and 18 dB, respectively. For the comparison between CEAPF and WDGF and at BER = 10−2, the KF achieves SNR of 20 dB for CEAPF and KF achieves SNR of 21 dB for WDGF and this means CEAPF outperforms WDGF by about 1 dB.
Figure 3 shows the comparison between the different types of channel estimation methods (LS, MMSE and KF) for the harbor water with (a) FoV = 20°, (b) FoV = 180°, for both modeling channels and using DCO-OFDM modulation technique. Using CEAPF channel modeling achieves tiny, better results than WDGF and using the KF channel estimation method which increases the accuracy and decreases the bit error rate than other channel estimation methods LS and MMSE. In Fig. 3.a, the simulation is calculated for M = 128 and FoV = 20°. Here, for BER = 10−1 and using KF and CEAPF, KF achieves SNR of 16 dB, while MMSE and LS achieve SNR of 19 and 19.5 dB, respectively.

Harbor water with different methods of channel estimation: a FoV = 20°, b FoV = 40°
Figure 4 shows the comparison the channel estimation between different water with KF for FoV = 40° and M = 128 for CEAPF channel modeling, using harbor while L = 5, L = 10, L = 16 and coastal water. We note rapprochement between them but the harbor water with L = 16 has a bad performance.

Channel estimation for different water types with using KF technique for FoV = 40°
The general comparison for coastal water is done between different channel estimation methods LS, MMSE and KF using both DCO and ACO OFDM modulation techniques in Fig. 5. The ACO-OFDM with CEAPF by using KF channel estimation method has the lowest BER compared to between other simulations. At BER = 10−2 the performance of the channel estimation for CEAPF outperforms that with WDGF for DCO-OFDM by nearly 1 dB (SNR). Also, CEAPF outperform WDGF for ACO-OFDM by nearly 0.35 dB (SNR). The improvement for WDGF with KF ACO-OFDM than DCO-OFDM by 1.3 dB. Using CEAPF channel modeling with DCO-OFDM, the KF outperforms MMSE and LS by 4 and 5 dB, respectively, at BER = 10−1. Also, using WDGF channel modeling with DCO-OFDM, KF outperforms both MMSE and LS by 1 and 2 dB, respectively, at BER = 10−1.

Channel estimation between different water with using KF technique for FoV = 20° by using ACO and DCO modulation techniques
8 Conclusion
Different types of water are used in the simulations with two channel modeling WDGF and CEAPF. The KF improves the channel estimation more than using LS and MMSE. Our strategy makes use of the optical modulation methods DCO-OFDM and ACO-OFDM.
The obtained results illustrate that the improvement percentage at BER = 10−1 for ACO-OFDM over DCO-OFDM with CEAPF modeling channel in coastal water is 13.3% and 9.3% for WDGF. This means that performance of the channel estimation with CEAPF for ACOOFDM outperforms that with DCO-OFDM by nearly 4%. A future work can be done by using the output results with deep learning techniques to improve the channel estimation through extended KF.
Data availability
The data used and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Akram, M., Aravinda, L., Munaweera, M., Godaliyadda, G., Ekanayake, M.: Camera based visible light communication system for underwater applications. In: IEEE International Conference on Industrial and Information Systems (ICIIS), pp. 1–6, Peradeniya (2017)
Alkhasraji, J., Tsimenidis, C.: Coded OFDM over short range underwater optical wireless channels using LED. In: OCEANS 2017 - Aberdeen, pp. 1–7 Aberdeen (2017)
Anous, N., Abdallah, M., Kashef, M., Qaraqe, K.A.: vlc-based system for optical spr sensing facility. In: IEEE Wireless Communications and Networking Conference, pp. 1–6. Doha (2016).
Asha T.M.: Design and development of novel channel estimation method for ofdm based underwater communication. Res. Sq. 1 (2021)
Carruther, J., Kahn, J.: Angle diversity for nondirected wireless infrared communication. IEEE Trans. Commun. 48, 960–969 (2000)
Celik, A., Saeed, N., Alouini, M.-S.: Modeling and performance analysis of multihop underwater optical wireless sensor networks. In: IEEE Wireless Communications and Networking Conference (WCNC), Barcelona (2018)
Coleri, S., Ergen, M., Puri, A., Bahai, A.: Channel estimation techniques based on pilot arrangement in OFDM systems. IEEE Trans. Broadcast. 48(3), 223–229 (2002)
Cossu, G., Sturniolo, A., Messa, A., Scaradozzi, D., Ciaramella, E.: Fullfledged 10base-t ethernet underwater optical wireless communication system. IEEE J. Sel. Areas Commun. 36, 194–202 (2018)
Ehiremen, A., Ebehiremen, I., Edeko, O.O.: High capacity data rate system: Review of visible light communications technology. J. Electron. Sci. Technol. 18, 100055 (2020)
Eroglu, Y.S, Erden, F., Guvenc, I.: Adaptive Kalman tracking for indoor visible light positioning. In: MILCOM 2019 - 2019 IEEE Military Communications Conference (MILCOM), pp. 331–336, Norfolk (2019)
Hessien, S., Tokgoz, S.C., Anous, N., Boyacı, A., Abdallah, M., Qaraqe, K.A.: Experimental evaluation of OFDM-based underwater visible light communication system. J. IEEE Photonics 10, 1–13 (2018)
Hsieh, C., Shiu, D.: Single carrier modulation with frequency domain equalization for intensity modulation-direct detection channels with intersymbol interference. In: IEEE 17th International Symposium on Personal, Indoor and Mobile Radio Communications, pp. 1–5, Helsinki (2006)
Jain, S., Gupta, P., Mehra, D.: EM-MMSE based channel estimation for OFDM systems. In: IEEE International Conference on Industrial Technology (ICIT), pp. 2598–2602 (2006)
Jamali, M.V., Chizari, A., Salehi, J.A.: Performance analysis of multihop underwater wireless optical communication systems. IEEE Photonics Technol. Lett. 29, 462–465 (2017a)
Jamali, M.V., Salehi, J.A., Akhoundi, F.: Performance studies of underwater wireless optical communication systems with spatial diversity: Mimo scheme. IEEE Trans. Commun. 65, 1176–1192 (2017b)
Jamali, M.V., Nabavi, P., Salehi, J.A.: MIMO underwater visible light communications: comprehensive channel study, performance analysis, and multiple-symbol detection. IEEE Trans. Veh. Technol. 67(9), 8223–8237 (2018)
Kashef, M., Ismail, M., Abdallah, M., Khalid, A.Q., Serpedin, E.: Energy efficient resource allocation for mixed rf/vlc heterogeneous wireless networks IEEE. J. Sel. Areas Commun. 34, 883–893 (2016)
Kodzovi, A., Sarah, K.W., Sarah, K.W.: Novel techniques of single carrier frequency domain equalization for optical wireless communications. EURASIP J. Adv. Signal Process. 20, 1–13 (2011)
Ma, X., Kobayashi, H., Schwartz, S.: EM-based channel estimation for OFDM. IEEE Pac. Rim Conf. Commun. Comput. Signal Process. (PACRIM) 2, 449–452 (2001)
Ma, X., Yang, F., Liu, S., Song, J.: Channel estimation for wideband underwater visible light communication: a compressive sensing perspective. Opt. Express 26, 311–321 (2018)
Mapunda, G.A., Ramogomana, R., Marata, L., Basutli, B., Khan, A.S., Chuma, J.M.: Indoor visible light communication: a tutorial and survey, Wirel. Commun. Mob. Comput. (2020)
Munaweera, P.D., Akram, M., Aravinda, D., Godaliyadda, R.I., Ekanayake, P.B.: Design and analysis of an underwater visible light MIMO communication system with a camera receiver. In: Seventeenth International Conference on Advances in ICT for Emerging Regions (ICTer), pp. 1–7, Colombo (2017)
Prasad, R., Murthy, C.: Bayesian learning for joint sparse OFDM channel estimation and data detection. In: IEEE Global Telecommunications Conference (GLOBECOM) pp. 1–6 (2010)
Priyalakshmi, K., Mahalakshmi, K.: Channel estimation and error correction for UWOC system with vertical non-line-of-sight channel. Wirel. Netw. 26, 4985–4997 (2020)
Proakis, J., Salehi, M.: Digital communications. Research article applied optics 13, 5th edn. McGraw-Hill, New York (2022)
Shawky, E., El-Shimy, M.A., Shalaby, H.: Kalman filtering for vlc channel estimation of aco-ofdm systems. In: Asia Communications and Photonics Conference (ACP 2018), pp. 1–3, Hangzhou (2018)
Sheng, B.: Blind timing synchronization in OFDM systems by exploiting cyclic structure. Trans. Emerging Telecommun. Technol. 25(2), 155–160 (2014)
Tang, S., Dong, Y., Zhang, X.: Impulse response modeling for underwater wireless optical communication links IEEE Trans. Commun. 62(226), 234 (2014)
Tang, S., Dong, Y., Zhang, X.: Impulse response modeling for underwater wireless optical communication links. IEEE Trans. Commun. 62, 226–234 (2014)
Ting, C.Y.L.: Predictive equalizer design for DVB-T system. IEEE Int. Symp. Circ. Syst. 2, 940–943 (2005)
Wang, C., Yu, H.-Y., Zhu, Y.-J.: A long distance underwater visible light communication system with single photon avalanche diode. IEEE Photonics J. 8, 1–11 (2016)
Yiming, L., Mark, S.L., Xiaofeng, L.: Impulse response modeling for underwater optical wireless channels. Appl. Opt. 57, 4815–4823 (2018)
Zang, Y., Zhang, J., Si-Ma, L.-H.: Anscombe root DCO-OFDM for SPAD-based visible light communication. IEEE Photonics J. 10, 1–9 (2018)
Zeng, Z., Fu, S., Zhang, H., Dong, Y., Cheng, J.: A survey of underwater optical wireless communications. IEEE Commun. Surv. Tut. 19, 204–238 (2017)
Zhang, H., Dong, Y.: Impulse response modeling for general underwater wireless optical mimo links. IEEE Commun. Mag. 54, 56–61 (2016)
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). The authors did not receive any funds to support this research.
Author information
Authors and Affiliations
Contributions
ESA, MHA and MAS have directly participated in the planning, execution, and analysis of this study and manuscript drafting. All authors read and approved the final version of this manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shawky, E., Aly, M.H. & El-Shimy, M. Underwater VLC channel estimation based on Kalman filtering for direct current optical- and asymmetrically clipping optical- orthogonal frequency division multiplexing techniques. Opt Quant Electron 55, 386 (2023). https://doi.org/10.1007/s11082-023-04687-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-04687-y
Keywords
- Weighted double gamma function (WDGF)
- Combination of exponential and arbitrary power function (CEAPF)
- Direct current optical orthogonal frequency division multiplexing (DCO-OFDM)
- Asymmetrically clipping optical orthogonal frequency division multiplexing (ACO-OFDM)
- Visible light communication (VLC)
- Kalman filter (KF)