
Abstract
In this paper, we derive a new exponential wave integrator sine pseudo-spectral (EWI-SP) method for the higher-order Boussinesq equation involving the higher-order effects of dispersion. The method is fully-explicit and it has fourth order accuracy in time and spectral accuracy in space. We rigorously carry out error analysis and establish error bounds in the Sobolev spaces. The performance of the EWI-SP method is illustrated by examining the long-time evolution of the single solitary wave, single wave splitting, and head-on collision of solitary waves. Numerical experiments confirm the theoretical results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we study the higher-order Boussinesq (HBq) equation
with initial and homogeneous boundary conditions. Here, u(x, t) denotes the unknown function, \(\eta _1\) and \(\eta _2\) are real positive constants. We consider a single power-type nonlinearity as \(f (u)=u^p\). The HBq equation was first derived by Rosenau for the continuum limit of a dense chain of particles with elastic couplings in [1]. The propagation of longitudinal waves in an infinite elastic medium with nonlinear and non-local properties is also described by the HBq equation in [2]. Choosing the parameter \(\eta _2=0\), (1.1) reduces the improved Boussinesq (IBq) equation
which models the water wave problem with zero surface tension [3]. The most well-known classical Boussinesq equation [4] is given by
When \(\alpha =-1\), (1.3) is called the “good” Boussinesq equation, and when \(\alpha =1\), it is known as the “bad” Boussinesq equation. Bogolubsky revealed that contrary to the “good” Boussinesq equation, the “bad” Boussinesq equation is unstable under short-wave perturbation and has no local well-posedness result in [5]. The improved Boussinesq equation has been shown as an approach for the “bad” Boussinesq equation by replacing the term \(u_{xxxx}\) with \(u_{xxtt}\), which is physically stable [5, 6].
Assume that u and all its derivatives converge to zero as \(x \rightarrow \pm \infty \). For the solutions of the HBq equation subjected to these boundary conditions, the conserved quantity (mass) is given in [7] as
where \(u=v_x\).
Regarding the existence of local/global solutions of the Cauchy problem concerning (1.1), the authors in [2] used the fixed-point technique for the initial data in \(H^s\) with \(s>1/2\). The local and global existence of solutions to the initial and boundary value problems corresponding to the initial data in (i) the Sobolev space \(W^{3,\infty }(0,1)\) for the nonlinear function \(f(s)\in C^1(\mathbb {R})\) with \(f(0)=0\) and (ii) the Sobolev space \(H^{m+3}(0,1)\), \(m\ge 1\) for the nonlinear function \(f(s)\in C^m (\mathbb {R})\) with \(f(0)=0\) are established in [8]. Considering a general nonlinearity, the group classification and exact solutions of the HBq equation are obtained in [9].
From the numerical point of view, a variety of numerical schemes for approximating the time evolution of the solutions of the “good” Boussinesq equation have been proposed including the finite difference methods [10, 11], pseudo-spectral methods [12, 13], splitting methods [14] and the exponential wave integrators [15]. There are also a large number of studies in the literature on the IBq equation involving finite difference methods [10, 16], finite element methods [17, 18], spectral methods [19], meshless methods [20], Runge–Kutta type exponential integrators [21], energy preserving methods [22, 23] and exponential wave integrators [24]. To the best of our knowledge, there is only one numerical study [7] in the literature considering the HBq equation. The convergence of the semi-discrete scheme is only proved in [7] and the authors focus on the quadratic nonlinearity.
The exponential wave integrator pseudo-spectral method has recently become very popular for solving time-dependent PDEs due to its superior properties. The method can be implemented efficiently by applying the fast discrete Fourier or Sine transform for the spatial discretization combined with an exponential wave integrator based on some efficient quadrature rules. Bao and Dong proposed a method based on the Fourier pseudo-spectral approach to spatial discretization followed by a Gautschi-type exponential integrator for the Klein-Gordon equation in the non-relativistic limit regime [25]. Zhao studied an exponential wave integrator sine pseudo-spectral method for solving the Klein-Gordon-Zakharov system in [26] and an exponential wave integrator Fourier pseudo-spectral method for solving symmetric regularized-long-wave equation in [27]. The numerical method is based on a Deuflhard-type and Gautschi-type exponential wave integrator for temporal integrations, respectively. Exponential wave integrator methods are also applied successfully for the nonlinear Schrödinger equation [28], the extended Fisher-Kolmogorov equation [29]. As far as we know, the methods given in above mentioned studies have second-order accuracy in time and spectral accuracy in space. A fourth-order exponential wave integrator Fourier pseudo-spectral method for the nonlinear Dirac equation and the nonlinear Schrödinger equation are proposed in [30] and [31], respectively. For approximating the integral terms, the authors in [30, 31] use the Simpson quadrature formula. However, the proposed schemes are implicit schemes that require solving a nonlinear system for each step. Ji and Zhang presented a fourth-order exponential wave integrator Fourier pseudo-spectral method for solving the Klein-Gordon equation in [32]. The scheme is explicit and the corrected trapezoidal formula is used for approximating the integral term. They proved the fourth-order convergence in time under the restriction \(\tau \le \frac{\pi h}{3\sqrt{2\pi ^2+h^2}}\), where \(\tau \) is the time step and h is the spatial step size. Wang and Zhao introduce a group of symmetric Gautschi-type exponential wave integrators for the Klein-Gordon equation [33] in nonrelativistic limit regime. The scheme has fourth-order convergence in time. However, this scheme involves a rather complicated procedure due to the approximation of the second-order time derivative of the nonlinear function.
To the best of our knowledge, the exponential wave integrator methods applied to “good” Boussinesq [15] and Improved Bousinesq equation [24] are both second-order accurate in time. In order to demonstrate higher-order calculations for the Boussinesq-type equations, we derive a new fourth-order accurate scheme in time. The scheme is easy to implement since it is explicit. We also avoid the approximation of the time derivative of nonlinear function only except for initial time. Most of the studies in the literature focus on the only convergence of the semi-discrete scheme, conservation properties, and stability analysis. Our aim is to prove error analysis of the exponential wave integrator sine pseudo-spectral method for the higher-order Boussinesq equation involving the higher-order effects of dispersion. We obtain optimal error estimates of the fully discrete scheme in the Sobolev space \(H^m\).
This article is outlined as follows. In Sect. 2, we propose a new exponential integrator sine pseudo-spectral method for the HBq equation. In Sect. 3, the error estimate is proved in detail. Sect. 4 is devoted to the numerical accuracy of the method. The scheme is tested for various problems, like the propagation of the single solitary wave, single wave splitting, and head-on collision of two solitary waves. Throughout this article, we use the notation \(A\lesssim B\) to represent that there exists a generic constant \(C>0\), which is independent of the time step \(\tau \) and spatial step size h, such that \(|A|\le CB\).
2 Numerical methods
In this section, we solve the HBq equation by combining a sine pseudo-spectral method for spatial derivatives with the fourth-order exponential wave integrator for temporal derivatives. We consider the HBq equation on a bounded domain \(\Omega =(a, b)\) with initial and homogeneous boundary conditions given by
where \(f\in C^\infty (\mathbb {R}, \mathbb {R})\). The space interval is chosen large enough so that the truncation error is negligible.
Now, we start introducing some notations employed throughout the paper. The interval [a, b] is divided into M equal subintervals with grid spacing \(h=(b-a)/M\), where M is a positive integer. The spatial grid points are given by \(x_{j}=a+jh \), \(j=0,1,2,\ldots ,M\). The time interval [0, T] is divided into N equal subintervals with time step \(\tau =T/N\) and temporal grid points \(t_n=n\tau \), \(n=0,\ldots ,N\). Denote
with \(\mu _l=\frac{l\pi }{b-a}\). For a general function u(x) on \(\overline{\Omega }=[a,b]\) and a vector \(u\in X_M\), let \(P_M: L^2(\Omega ) \rightarrow Y_M\) be the standard \(L^2\)-projection operator and \(I_M: C_0(\overline{\Omega })\rightarrow Y_M\) or \(I_M: X_M\rightarrow Y_M\) be the trigonometric interpolation operator as
where \(\widehat{u}_l\) and \(\widetilde{u}_l\) are the sine and discrete sine transform coefficients, respectively, given by
with \(u_j=u(x_j)\) when involved. The sine pseudo-spectral approximation
for the solution of (2.1) satisfies
Substituting (2.4) into (2.5) and noticing the orthogonality of \(\sin (\mu _l(x-a))\) for \(l=1,...,M-1\), one gets
where \(f_M^n(x,s)=P_M f(u_M(x,t_n+s))\) and \(\theta _l=\mu _l/\sqrt{1+\eta _1\mu _l^2+\eta _2\mu _l^4}\).
By using the well-known variation of the parameters formula, the general solution of the (2.6) is given by
Differentiating (2.7) with respect to s, we obtain
Plugging \(s=2\tau \) and replacing n by \(n-1\), one gets
In order to obtain the fourth-order accuracy method, we approximate the integral term in (2.9) by the Simpson rule as
noticing that \(\widehat{(f_M^{n-1})}_l(\tau )=\widehat{(f_M^n)}_l(0)\). Similarly, plugging \(s=2\tau \) and replacing n by \(n-1\) in (2.8), we obtain
Applying Simpson’s rule for approximating the integration in (2.11) yields
In practice, computing the continuous sine coefficients in (2.9)-(2.12) is difficult. Therefore, we replace the continuous sine coefficients with the discrete sine coefficients as in (2.2) and (2.3). Now, we introduce the fourth-order EWI-SP scheme: Let \(u_j^n\) and \(\dot{u}_j^n (j=0, 1, \ldots , M, n=0, 1, \ldots )\) be the approximations to \(u(x_j, t_n)\) and \(u_t (x_j, t_n)\), respectively. Setting \(u_j^0=u_0(x_j)\), \(\dot{u}_j^0=u_1(x_j)\), the numerical approximations \(u^{n+1},\dot{u}^{n+1}\in X_M\) are computed as
where the discrete sine coefficients are computed as follows for \(n\ge 1\):
with
In order to start the iteration, we need the initial values \(u^1\) and \(\dot{u}^1\).
Computation of \(\widehat{u}_l(t_1)\): If we differentiate (2.6) with respect to s, we obtain
By using (2.6) and (2.16) in Taylor’s expansion, the fourth-order approximation can be written as
where \(s_{l,1}\in (0,\tau )\). Since \(f\in C^\infty (\mathbb {R}, \mathbb {R})\), the sine coefficients \(\widehat{(f_M^0)}^{\prime }_l(0)\) for \(l=0,1,\ldots M-1\) are computed as
Computation of \(\widehat{u}_l^\prime (t_1)\): Approximating \(\widehat{u}_l(t_0)\) and \(\widehat{u}_l(t_2)\) by using Taylor’s expansion around \(t_1\), and taking their difference, one can get
where \(s_{l,2}\in (0,2\tau )\). Using
where \(s_{l,3}\in (0,2\tau )\), (2.19) becomes
By (2.6)
we obtain
where \(s_{l,4}\in (0,2\tau )\).
By replacing the continuous sine coefficients with the discrete sine coefficients, the discrete sine coefficients at the first time step are obtained as follows:
where
To summarize, the scheme is based on the following steps:
- Step 1::
-
The discrete sine coefficients \(\widetilde{u_l^0}\), \(\widetilde{\dot{u}_l^0}\), \(\widetilde{f_l^0}\), \(\widetilde{\dot{f}_l^0}\) are found by using the formulas (2.15) and (2.24).
- Step 2::
-
\(\widetilde{u_l^1} \) is computed by using (2.23).
- Step 3::
-
\(\widetilde{f_l^1}\) is calculated by using (2.15) after constructing the approximate solution \(u^1\).
- Step 4::
-
\(\widetilde{u_l^{2}}\) is evaluated by using (2.14).
- Step 5::
-
\(\widetilde{f_l^2}\) is obtained by using (2.15) after constructing the approximate solution \(u^2\).
- Step 6::
-
\(\widetilde{\dot{u}_l^1}\) and \(\widetilde{\dot{u}_l^2}\) are evaluated by using (2.23) and (2.14), respectively, and then \(\dot{u}^1\) and \(\dot{u}^2\) are constructed.
- Step 7::
-
\(u^n\) and \(\dot{u}^n\) can be found for \(n\ge 3\) by using (2.13)-(2.15).
3 Error estimates
In this section, we give the error analysis for the fully discretized scheme (2.14) and (2.23). We denote the standard Sobolev space by \(H^m(\Omega )\). We define its subspace \(H^m \cap H_0^1\) as
for some integer \(m\ge 1\). For any function \(u(x)={\sum \limits _{l=1}^\infty } \widehat{u}_l \sin (\mu _l(x-a))\in \widetilde{H}^m(\Omega )\), we define its norm as
Particularly, for \(m=0\), the space is exactly \(L^2(\Omega )\) and the corresponding norm is denoted as \(\Vert \cdot \Vert \). In order to obtain the convergence of the fully discrete scheme, we need the following auxiliary lemmas.
Lemma 3.1
[26] For any \(0 \le \mu \le k\) with \(k>1/2\), there exists a constant C such that
Lemma 3.2
[34] For \(m >1/2\), \(H^m (\mathbb {R})\) is an algebra with respect to the product of functions. That is, if \(u, v \in H^m(\mathbb {R})\) then \(uv \in H^m(\mathbb {R})\) and
Lemma 3.3
[35] For any function \(g\in C^\infty (\mathbb {C}, \mathbb {C})\) and \(\sigma >1/2\), there exists a nondecreasing function \(\chi _g: \mathbb {R}^+\rightarrow \mathbb {R}^+\) such that
For all \(v, w\in B_R^\sigma :=\{u\in H^\sigma : \Vert u\Vert _{\sigma }\le R\}\), we have
where \(\alpha (g, R)=\Vert g'(0)\Vert _\sigma +R\chi _{g'}(cR)\) is nondecreasing with respect to R, with \(c>0\) being the constant for the Sobolev imbedding \(\Vert \cdot \Vert _{L^\infty }\le c\Vert \cdot \Vert _\sigma \).
For simplicity of notation, we denote the interpolations of the numerical solutions by
and the error functions by
Theorem 3.1
Let the solution of the HBq equation (2.1) satisfy the regularity properties \({u\in C^1\big ([0,T];\widetilde{H}^{m+\sigma }\big )\cap C^5\big ([0,T];\widetilde{H}^m\big )(m>\frac{1}{2}, \sigma >0)}\). Then, there exist \(h_0>0\) and \(0<\tau _0\le 1\) such that when \(\tau \le \tau _0\) and \(h\le h_0\), the numerical solutions \(u^n\) and \(\dot{u}^n\) obtained from the EWI-SP scheme (2.13)-(2.15) with (2.23) and (2.24) converge to the solution of the problem (2.1) with the convergence rate
with \(\Vert \partial _t^k u\Vert _{L^\infty ([0,T];H^m)}\le K_k\) for \((k=0,1,\ldots ,5)\) and \(\Vert \partial _t^k u\Vert _{L^\infty ([0,T];H^{m+\sigma })}\le R_k\) for \((k=0,1)\). Furthermore, we have
Proof
We give the proof for (3.6) and (3.7) by mathematical induction. For \(n=0\), noticing that \({e^0=u_0-I_M(u_0)}\), \(\dot{e}^0=u_1-I_M(u_1)\), applying Lemma 3.1, one gets
There exists a constant \(h_1>\!0\) such that, when \(0<\!h\le \! h_1\), the inequality (3.7) is valid for \(n=0\). Assuming (3.6) and (3.7) are true for \(n\le \! k\!<T/\tau \), we show that (3.6) and (3.7) are valid for \(n=k\!+\!1\). The projected error functions are introduced by
where the corresponding coefficients in the frequency satisfy
We define the local truncation errors
where
for \(n\ge 1\) and
with \(\widehat{f}^n_l(s)=\widehat{f(u(t_n+s))}_l\).
If we subtract (2.14) and (2.23) from (3.9) and (3.10) respectively, the resulting error equations for \(n\ge 1\) become
and
where the nonlinear errors are
with \(\widehat{\eta _l^n}=\widehat{f_l^n}(0)-\widetilde{f_l^n}\) and \(\widehat{\dot{\eta }_l^0}=\widehat{(f_l^0)^\prime }(0)-\widetilde{\dot{f}_l^0}\).
Step 1: Estimation of local truncation errors
Substituting (2.9) and (2.11) into (3.9), (2.17) and (2.22) into (3.10) respectively, the resulting truncation errors for \(n\ge 1\) become
and
It is clear that
Thus, the local truncation errors in (3.15) actually come from the error using the Simpson rule. By the standard error formula of the Simpson rule for a general function \(v(s)\in C^4 [0,2\tau ]\)
the local truncation errors (3.15) become
where \(s_{l,5},s_{l,6}\in (0,2\tau )\). Since \(\eta _1\) and \(\eta _2\) are positive real numbers, we have \(|\theta _l|\le 1/\sqrt{\eta _1}\). Applying Young’s inequality to the above equations, we deduce
Using the assumptions \(\Vert \partial _t^k u\Vert _{L^\infty ([0,T];H^m)}\le K_k\) for \((k=0,1,\ldots ,4)\) and \(f\in C^\infty (\mathbb {R},\mathbb {R})\), it follows that
for \(n\ge 1\).
Step 2: Estimation of nonlinear errors
Now, we show that \(\dot{\eta }^0\) and \(\eta ^n\) are bounded in \(H^m\) with \(m > 1/2\). We use Lemmas 3.1\(-\)3.3 and \(u_I^n,u(\cdot ,t_n)\in B^m_{K_0+1}\) to obtain
On the other hand,
In order to estimate \(\Vert \eta ^{n+1}\Vert _m\), we need to find an upper bound for \(\Vert u_I^{n+1}\Vert _m\). It follows that
Therefore, we deduce that
Step 3: Error equations
From (3.13), one gets
Substituting (3.11) with \(n=1\) into (3.14) yields
This implies that
Hence,
for \(\tau \le 1\). Applying the triangle and Young’s inequalities to (3.11) and (3.12), we obtain
for \(n\ge 1\). Hence,
Moreover, we define
It is easy to see that
by Lemma 3.1 and (3.8). Combining the inequalities (3.16), (3.17) and
one can estimate
for \(0<\tau \le \tau _1\). Using (3.21), we obtain
for \(n\ge 1\). This implies that
Substituting (3.17) and (3.24) into (3.26), we get
Summing the above inequalities from \(n=1\) to \(n=k\) such that \(k\le T/\tau \), one can find
In view of (3.23), (3.25), one may estimate
for \(0<\tau \le \tau _2\). When the discrete Gronwall’s Lemma is applied to (3.27), we finally show that
Moreover, using Lemma 3.1 and (3.28), we deduce that
There exist sufficiently small \(h_2\) and \(\tau _3\) such that the following inequalities hold
when \(0<h\le h_2\) and \(0<\tau \le \tau _3\). The proof of the Theorem 3.1 is completed by choosing \(h_0=\min \{h_1,h_2\}\) and \(\tau _0=\min \{1,\tau _1,\tau _2,\tau _3\}\).\(\square \)
4 Numerical experiments
To investigate the performance of the proposed EWI-SP method, we now consider the propagation of a single solitary wave, the single wave splitting, the head-on collision of two solitary waves. For all the numerical experiments, we choose the nonlinear function \(f(u)=u^p\) with \(p=2\) or \(p=3\). To quantify the error, we use the following error function
where \(u^n_{\tau ,h}\) and \(\dot{u}^n_{\tau ,h}\) are the numerical solutions obtained by the EWI-SP method.
4.1 Single solitary wave
The exact solitary wave solution of the HBq equation is given in [7] as
where
Here, A is amplitude, B is the inverse width of the solitary wave and c represents the velocity of the solitary wave at \(x_0\) with \(c^2>1\).

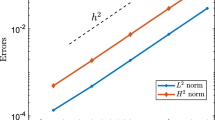
The spatial errors (left panel) and the temporal errors (right panel) of the EWI-SP method for the solution under different grid spacing and time steps
The problem is solved on the space interval \(\Omega =(-400,400)\) for times up to \(T=10\). We choose the parameters \(\eta _1=\eta _2=1\) with \(x_0=0\) taking the initial condition corresponding to the exact solitary wave solution in (4.1)-(4.3). To test whether the EWI-SP method exhibits the expected convergence rate in the space, we perform some numerical experiments for various values of h and a fixed value of time step \(\tau \). We take a tiny time step \(\tau =0.005\) so that the temporal error is negligible. In the left panel of Fig. 1, we present the variation of the error with different values of h. As is seen from the figure, the error decays very rapidly when the spatial step size h decreases. This numerical experiment shows that the EWI-SP method converges rapidly to the accurate solution in space, which is indicative of exponential convergence. In order to confirm the temporal error bound given in Theorem 3.1, the computations are performed for fixed value \(h=0.5\) and various values of the time step \(\tau \). The right panel of Fig. 1 shows the temporal errors of the EWI-SP method. As we expected, the scheme has fourth-order accuracy in time, which agrees with the theoretical result in Theorem 3.1.

Conservation of mass (left panel) and long-time errors (right panel) of the EWI-SP method by choosing \(h=0.5\) and \(\tau =0.005\)
The evolution of the change for the conserved quantity \(\mathcal {M}\) is depicted in the left panel of Fig. 2. This figure illustrates that the EWI-SP method preserves conserved quantity very well. Next, we investigate the long-time behavior of the EWI-SP method up to \(T=100\). The right panel of Fig. 2 shows that the error is about \(10^{-12}\), even for the cubic nonlinearity. It can be observed that the EWI-SP method is reliable for long-time dynamics.
4.2 Single wave splitting
In these numerical experiments, we set \(\eta _1=\eta _2=1\). The initial data
are chosen for quadratic nonlinearity. We take the following initial data
for cubic nonlinearity. The computations are performed on the domain \(\Omega =(-400,400)\) up to \(T=60\) with \(h=0.5\) and \(\tau =0.005\). In the left panel of Fig. 3, we show the dynamics of the solitary wave with amplitude \(A = \displaystyle \frac{15}{38}\) and the null initial velocity for quadratic nonlinearity. Snapshots of the solutions at different times are illustrated in the right panel of Fig. 3. We observe that the initial stationary wave splits up into two smaller diverging waves, one traveling towards the left and the other one to the right and the splitting leads to the creation of secondary solitary waves.

The contour plot of single wave splitting for the quadratic nonlinearity (left panel), snapshots of the solitary wave at different times (right panel)

The contour plot of single wave splitting for the cubic nonlinearity (left panel), snapshots of the solitary wave at different times (right panel)

The evolution of the change in the conserved quantity \(\mathcal {M}\) for the single wave splitting
The dynamic of the solitary wave with the amplitude \(\displaystyle \sqrt{\frac{5}{14}}\) and the null initial velocity is depicted in Fig. 4 for cubic nonlinearity. We observe that the dynamics are similar to quadratic nonlinearity. However, the secondary waves between the two main splitting waves become more discernible when the power of nonlinearity increases.
Since an analytical solution is not available for the single wave splitting experiments, we cannot present the errors for this experiment. However, we present the evolution of the change in the conserved quantity \(\mathcal {M}\) as a numerical check of the proposed scheme in Fig. 5. The conserved quantity remains constant in time and this behavior provides a valuable check on the numerical results.
4.3 Head-on collision
In these numerical experiments, we use the initial data
for quadratic nonlinearity and
for cubic nonlinearity by taking \(\eta _1=\eta _2=1\). The computations are performed on the domain \(\Omega =(-400,400)\) up to \(T=72\) with \(h=0.5\) and \(\tau =0.005\). In the left panel of Fig. 6, we show the head-on collision of two solitary waves with equal amplitudes for quadratic nonlinearity. We see the oscillating secondary waves. Therefore, the interaction is inelastic. The numerical solution at different times is shown in the right panel of Fig. 6. The collision occurs at around \(t=35.08\) with the largest amplitude which is smaller than the sum of the two initial amplitudes. We observe that the small secondary waves are emitted after collision time. We also compute that the amplitudes of secondary waves are smaller than 0.006.

The surface plot of the head-on collision of two solitary waves for the quadratic nonlinearity (left panel), snapshots of the solution at different times (right panel)

The surface plot of the head-on collision of two solitary waves for the cubic nonlinearity (left panel), snapshots of the solution at different times (right panel)

The evolution of the change in the conserved quantity \(\mathcal {M}\) for the head-on collision of two solitary waves
The head-on collision of two solitary waves for cubic nonlinearity is illustrated in Fig. 7, we see that the collision is inelastic and the interaction is similar to quadratic nonlinearity. We observe that the amplitudes of secondary waves are smaller than 0.0098. We also observe that the amplitudes of secondary waves which occur after the collision are less than 2% of the amplitude of the waves at the initial time for both quadratic and cubic nonlinearity. Figure 8 shows that the conserved quantities for the head-on collision of two solitary waves remain constant in time for both cases. These results provide a valuable check on the numerical results.
Data availability
No data is used and generated in this manuscript.
References
Rosenau, P.: Dynamics of dense discrete systems: high order effects. Prog. Theor. Phys. 79(5), 1028–1042 (1988). https://doi.org/10.1143/PTP.79.1028
Duruk, N., Erkip, A., Erbay, H.A.: A higher-order Boussinesq equation in locally non-linear theory of one-dimensional non-local elasticity. IMA J. Appl. Math. 74(1), 97–106 (2008). https://doi.org/10.1093/imamat/hxn020
Schneider, G.: The long wave limit for a Boussinesq equation. SIAM J. Appl. Math. 58(4), 1237–1245 (1998). https://doi.org/10.1137/s0036139995287946
Boussinesq, J.: Théorie des ondes et des remous qui se propagent le long d’un canal rectangulaire horizontal, en communiquant au liquide contenu dans ce canal des vitesses sensiblement pareilles de la surface au fond. J. Math. Pures Appl. 17, 55–108 (1872)
Bogolubsky, I.L.: Some examples of inelastic soliton interaction. Comput. Phys. Commun. 13(3), 149–155 (1977). https://doi.org/10.1016/0010-4655(77)90009-1
Makhankov, V.G.: Dynamics of classical solitons (in non-integrable systems). Phys. Rep. 35(1), 1–128 (1978). https://doi.org/10.1016/0370-1573(78)90074-1
Oruc, G., Borluk, H., Muslu, G.M.: Higher order dispersive effects in regularized Boussinesq equation. Wave Motion 68, 272–282 (2017). https://doi.org/10.1016/j.wavemoti.2016.10.005
Oruc, G., Muslu, G.M.: Existence and uniqueness of solutions to initial boundary value problem for the higher order Boussinesq equation. Nonlinear Anal.: Real World Appl. 47, 436–445 (2019). https://doi.org/10.1016/j.nonrwa.2018.11.012
Hasanoǧlu, Y., Özemir, C.: Group classification and exact solutions of a higher-order Boussinesq equation. Nonlinear Dyn. 104(3), 2599–2611 (2021). https://doi.org/10.1007/s11071-021-06382-7
Bratsos, A.G.: A second order numerical scheme for the solution of the one-dimensional Boussinesq equation. Numer. Algorithms 46(1), 45–58 (2007). https://doi.org/10.1007/s11075-007-9126-y
Ortega, T., Sanz-Serna, J.M.: Nonlinear stability and convergence of finite-difference methods for the “good" Boussinesq equation. Numer. Math. 58(1), 215–229 (1990). https://doi.org/10.1007/bf01385620
Cheng, K., Feng, W., Gottlieb, S., Wang, C.: A fourier pseudospectral method for the “good’’ Boussinesq equation with second-order temporal accuracy. Numer. Methods Partial Differ. Equ. 31(1), 202–224 (2014). https://doi.org/10.1002/num.21899
Frutos, J., Ortega, T., Sanz-Serna, J.M.: Pseudospectral method for the “good" Boussinesq equation. Math. Comput. 57(195), 109–122 (1991). https://doi.org/10.2307/2938665
Zhang, C., Wang, H., Huang, J., Wang, C., Yue, X.: A second order operator splitting numerical scheme for the “good" Boussinesq equation. Appl. Numer. Math. 119, 179–193 (2017). https://doi.org/10.1016/j.apnum.2017.04.006
Su, C., Yao, W.: A Deuflhard-type exponential integrator Fourier pseudo-spectral method for the “good” Boussinesq equation. J. Sci. Comput. 83(1) (2020). https://doi.org/10.1007/s10915-020-01192-2
Bratsos, A.G.: A predictor–corrector scheme for the improved Boussinesq equation. Chaos, Solitons Fractals 40(5), 2083–2094 (2009). https://doi.org/10.1016/j.chaos.2007.09.083
Irk, D., Daǧ, I.: Numerical simulations of the improved Boussinesq equation. Numer. Methods Partial Differ. Equ. 26(6), 1316–1327 (2009). https://doi.org/10.1002/num.20492
Lin, Q., Wu, Y.H., Loxton, R., Lai, S.: Linear B-spline finite element method for the improved Boussinesq equation. J. Comput. Appl. Math. 224(2), 658–667 (2009). https://doi.org/10.1016/j.cam.2008.05.049
Borluk, H., Muslu, G.M.: A Fourier pseudospectral method for a generalized improved Boussinesq equation. Numer. Methods Partial Differ. Equ. 31(4), 995–1008 (2014). https://doi.org/10.1002/num.21928
Shokri, A., Dehghan, M.: A not-a-knot meshless method using radial basis functions and predictor–corrector scheme to the numerical solution of improved Boussinesq equation. Comput. Phys. Commun. 181(12), 1990–2000 (2010). https://doi.org/10.1016/j.cpc.2010.08.035
Mohebbi, A.: Solitary wave solutions of the nonlinear generalized Pochhammer–Chree and regularized long wave equations. Nonlinear Dyn. 70(4), 2463–2474 (2012). https://doi.org/10.1007/s11071-012-0634-5
Wang, Q., Zhang, Z., Zhang, X., Zhu, Q.: Energy-preserving finite volume element method for the improved Boussinesq equation. J. Comput. Phys. 270, 58–69 (2014). https://doi.org/10.1016/j.jcp.2014.03.053
Yan, J., Zhang, Z., Zhao, T., Liang, D.: High-order energy-preserving schemes for the improved Boussinesq equation. Numer. Methods Partial Differ. Equ. 34(4), 1145–1165 (2018). https://doi.org/10.1002/num.22249
Su, C., Muslu, G.M.: An exponential integrator sine pseudospectral method for the generalized improved Boussinesq equation. BIT Numer. Math. 61(4), 1397–1419 (2021). https://doi.org/10.1007/s10543-021-00865-0
Bao, W., Dong, X.: Analysis and comparison of numerical methods for the Klein-Gordon equation in the nonrelativistic limit regime. Numer. Math. 120(2), 189–229 (2011). https://doi.org/10.1007/s00211-011-0411-2
Zhao, X.: On error estimates of an exponential wave integrator sine pseudospectral method for the Klein-Gordon-Zakharov system. Numer. Methods Partial Differ. Equ. 32(1), 266–291 (2015). https://doi.org/10.1002/num.21994
Zhao, X.: An exponential wave integrator pseudospectral method for the symmetric regularized-long-wave equation. J. Comput. Math. 34(1), 49–69 (2016). https://doi.org/10.4208/jcm.1510-m4467
Bao, W., Cai, Y.: Uniform and optimal error estimates of an exponential wave integrator sine pseudospectral method for the nonlinear Schrödinger equation with wave operator. SIAM J. Numer. Anal. 52(3), 1103–1127 (2014). https://doi.org/10.1137/120866890
Li, X., Zhang, L.: Error estimates of a trigonometric integrator sine pseudo-spectral method for the extended Fisher-Kolmogorov equation. Appl. Numer. Math. 131, 39–53 (2018). https://doi.org/10.1016/j.apnum.2018.04.010
Li, J.: Error analysis of a time fourth-order exponential wave integrator Fourier pseudo-spectral method for the nonlinear Dirac equation. Int. J. Comput. Math. 99(4), 791–807 (2021). https://doi.org/10.1080/00207160.2021.1934459
Ji, B., Zhang, L.: Error estimates of exponential wave integrator Fourier pseudospectral methods for the nonlinear Schrödinger equation. Appl. Math. Comput. 343, 100–113 (2019). https://doi.org/10.1016/j.amc.2018.09.041
Ji, B., Zhang, L.: A fourth-order exponential wave integrator Fourier pseudo-spectral method for the Klein-Gordon equation. Appl. Math. Lett. 109, 106519 (2020). https://doi.org/10.1016/j.aml.2020.106519
Wang, Y., Zhao, X.: Symmetric high order Gautschi-type exponential wave integrators pseudospectral method for the nonlinear Klein-Gordon equation in the nonrelativistic limit regime (2016)
Adams, R.A., Fournier, J.J.F.: Sobolev Spaces. ISSN. Elsevier Science, Amsterdam (2003)
Chartier, P., Méhats, F., Thalhammer, M., Zhang, Y.: Improved error estimates for splitting methods applied to highly-oscillatory nonlinear Schrödinger equations. Math. Comput. 85(302), 2863–2885 (2016). https://doi.org/10.1090/mcom/3088
Acknowledgements
The authors would like to express sincere gratitude to the reviewers and the editor for their constructive suggestions which helped to improve the quality of this paper. Melih Cem Canak was supported by the Scientific and Technological Research Council of Turkey (TUBITAK) under the grant 2210. This work was also supported by the Research Fund of the Istanbul Technical University. Project Number: 43325.
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK). Melih Cem Canak was supported by the Scientific and Technological Research Council of Turkey (TUBITAK) under the grant 2210. This work was also supported by the Research Fund of the Istanbul Technical University. Project Number: 43325.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this work. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethical approval
Not applicable
Consent to participate
Not applicable
Consent for publication
Not applicable
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Canak, M.C., Muslu, G.M. Error analysis of the exponential wave integrator sine pseudo-spectral method for the higher-order Boussinesq equation. Numer Algor (2024). https://doi.org/10.1007/s11075-024-01763-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11075-024-01763-6