
Abstract
We construct new families of direct serendipity and direct mixed finite elements on general planar, strictly convex polygons that are H1 and H(div) conforming, respectively, and possess optimal order of accuracy for any order. They have a minimal number of degrees of freedom subject to the conformity and accuracy constraints. The name arises because the shape functions are defined directly on the physical elements, i.e., without using a mapping from a reference element. The finite element shape functions are defined to be the full spaces of scalar or vector polynomials plus a space of supplemental functions. The direct serendipity elements are the precursors of the direct mixed elements in a de Rham complex. The convergence properties of the finite elements are shown under a regularity assumption on the shapes of the polygons in the mesh, as well as some mild restrictions on the choices one can make in the construction of the supplemental functions. Numerical experiments on various meshes exhibit the performance of these new families of finite elements.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Serendipity finite elements defined on a rectangle \(\hat {E}\), denoted as \(\mathcal {S}_{r}(\hat {E})\), r ≥ 1, are well known to be H1-conforming and approximate to order r + 1 with a minimal number of degrees of freedom (DoFs). The finite elements \(\mathcal {S}_{r+1}(\hat E)\) are related to Brezzi-Douglas-Marini [1] mixed finite elements \(\textrm {BDM}_{r}(\hat {E})\), r ≥ 1, through a de Rham complex [2]. \(\textrm {BDM}_{r}(\hat {E})\) is H(div)-conforming and has optimal order approximation properties with a minimal number of DoFs. Arnold and Awanou [3, 4] have given a definition, construction, and geometric decomposition of \(\mathcal { S}_{r}(\hat {E})\) and \(\textrm {BDM}_{r}(\hat {E})\) of any approximation order on cubical meshes in any dimension. However, the elements lose optimal order accuracy when mapped to a quadrilateral E.
Recently, the current authors and Z. Tao [5] constructed serendipity spaces directly on quadrilaterals of any approximation order r + 1 ≥ 2 without using a mapping from a reference element. The resulting new family of spaces were called direct serendipity finite elements and denoted \(\mathcal {D}\mathcal {S}_{r}(E)\), r ≥ 1. The de Rham complex then yields a strategy to construct H(div) conforming direct mixed finite elements, denoted \(\mathbf {V}_{r}^{r-1}(E)\) and \({\mathbf {V}_{r}^{r}}(E)\), giving optimal order reduced and full H(div)-approximation with a minimal number of DoFs. The direct serendipity finite elements take the form
where \(\mathbb P_{r}(E)\) is the space of polynomials on E up to degree r, and \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E)\) consists of supplemental functions. The direct mixed elements take a similar form. In this paper, we construct a new family of direct serendipity and direct mixed finite elements for a general planar, strictly convex polygon, discuss their approximation properties, and test their performance by numerical experiments.
Other approaches to construct serendipity and mixed finite elements with a minimal number of degrees of freedom have appeared in the literature. In [6], Rand, Gillette, and Bajaj used products of linear generalized barycentric coordinates to construct serendipity finite elements on quadrilaterals. Based on this work, Sukumar [7] constructed quadratic maximum-entropy serendipity shape functions. These two works only have elements with quadratic order of accuracy, and it appears to be technically difficult to develop higher order accurate serendipity finite elements in this way. However, their construction works for general polygonal elements, including non-convex ones. For mixed spaces, Chen and Wang [8] constructed minimal degree H(curl) and H(div) conforming finite elements of linear accuracy based on generalized barycentric coordinates and the Whitney forms. Floater and Lai [9] generalized this idea to construct finite element spaces for a general order of accuracy r. However, their construction asks for more DoFs than the minimum, since \(\frac {1}{2}(r-1)(r-2)\) interior DoFs are always required for any polygon. Another methodology, the serendipity virtual element method, was introduced in [10] to deal with general polygonal elements, including non-convex and very distorted elements. The method works for any order of accuracy r, but it uses even more interior DoFs, \(\frac {1}{2}r(r-1)\).
In the rest of this paper, we generalize the construction in [5] to a general strictly convex polygon EN with N vertices. Our construction does not extend to non strictly convex polygons. We begin by introducing some notation in Section 2. In Section 3 we define higher order direct serendipity elements (r ≥ N − 2) and show their unisolvence and conformity by the construction of nodal basis functions. In Section 4, lower order direct serendipity elements (r < N − 2) are constructed within a higher order direct serendipity space. We discuss the approximation properties and convergence rates of the space \(\mathcal {D}\mathcal {S}_{r}\) over the whole domain Ω in Section 5. In Sections 6 and 7, we construct direct mixed finite elements from the direct serendipity elements and the de Rham complex, and then discuss the convergence theory. In Section 8, we provide some numerical results that test the performance of our direct spaces on various meshes. Finally, the results are summarized in Section 9.
2 Some notation
Let \(\mathbb P_{r}(\omega )\) denote the space of polynomials of degree up to r on \(\omega \subset \mathbb {R}^{d}\), where d = 0 (a point), 1, or 2. Recall that
Let \(\tilde {\mathbb {P}}_{r}(\omega )\) denote the space of homogeneous polynomials of degree r on ω. Then
When r < 0, we interpret \(\mathbb P_{r}\) as the empty set with dimension zero.
Let the element \(E=E_{N}\subset \mathbb {R}^{2}\) be a closed, nondegenerate, strictly convex polygon with N ≥ 3 edges. By nondegenerate, we mean that EN does not degenerate to any polygon with fewer edges, a line segment, or a point. We choose to identify the edges and vertices of EN adjacently in the counterclockwise direction, as depicted in Fig. 1 (throughout the paper, we interpret indices modulo N). Let the edges of EN be denoted ei, i = 1,2,…,N, and the vertices be xv,i = ei ∩ ei+ 1. Let νi denote the unit outer normal to edge ei, and let τi denote the unit tangent vector of ei oriented in the counterclockwise direction, for i = 1,2,…,N.

A pentagon E5, with edges ei, outer unit normals νi, tangents τi, and vertices xv,i
Let the overall domain \({\Omega }\subset \mathbb {R}^{2}\) be a connected, polygonal open set with a Lipschitz boundary (i.e., Ω has no slits). Let \(\mathcal {T}_{h}\) be a conforming finite element partition or mesh of \(\bar {\Omega }\) into elements (closed, nondegenerate, convex polygons) of maximal diameter h > 0. These elements need not have the same number of edges.
For any two distinct points y1 and y2, let \({\mathscr{L}}{[\mathbf {y}_{1},\mathbf {y}_{2}]}\) be the line passing through y1 and y2, and take ν[y1,y2] to be the unit vector normal to this line interpreted as going from y1 to y2 in the clockwise direction (i.e., pointing to the right). Then we define a linear polynomial giving the signed distance of x to \({\mathscr{L}}{[\mathbf {y}_{1},\mathbf {y}_{2}]}\) as
To simplify the notation for linear functions that will be used throughout the paper, let \({\mathscr{L}}_{i}={\mathscr{L}}[\mathbf {x}_{v,i-1},\mathbf {x}_{v,i}]\) be the line containing edge ei and let λi(x) give the distance of \(\mathbf {x}\in \mathbb {R}^{2}\) to edge ei opposite the normal direction, i.e.,
These functions are strictly positive in the interior of EN, and each vanishes on the edge which defines it.
Recall Ciarlet’s definition [11] of a finite element.
Definition 2.1 (Ciarlet 1978)
Let
-
1.
\(E\subset \mathbb {R}^{d}\) be a bounded closed set with nonempty interior and a Lipschitz continuous boundary,
-
2.
\(\mathcal {P}\) be a finite-dimensional space of functions on E, and
-
3.
\(\mathcal {N} = \{ N_{1}, N_{2},\ldots , N_{\dim \mathcal {P}} \}\) be a basis for \(\mathcal {P}^{\prime }\).
Then \((E, \mathcal {P}, \mathcal {N})\) is called a finite element.
3 Direct serendipity elements when r ≥ N − 2
We construct direct serendipity elements for r ≥ N − 2 in this section. The construction for 1 ≤ r < N − 2 is different, and it is discussed in Section 4.
To obtain both that \(\mathbb P_{r}(E)\subset {\mathcal {D}\mathcal {S}}_{r}(E)\) and that the shape functions on adjoining elements can be merged together continuously, we consider the lower dimensional geometric objects within E. As shown in Table 1, the minimal number of DoFs associated to each lower dimensional object must correspond to the dimension of the polynomials that restrict to that object. A polygon with N sides has N vertices, N edges, and one cell of dimension 0, 1, and 2, respectively. Each vertex requires \(\dim \mathbb P_{r}(\mathbb {R}^{0})=1\) DoF, each edge requires \(\dim \mathbb P_{r-2}(\mathbb {R})=r-1\) DoFs (interior to the edge), and each cell requires \(\dim \mathbb P_{r-N}(\mathbb {R}^{2})=\left (\begin {array}{cccc}r-N+2\\2 \end {array}\right )=\frac 12(r-N+2)(r-N+1)\) DoFs (interior to the cell). There are cell DoFs only if r ≥ N, but the formula works for r ≥ N − 2. The total number of DoFs is then DN,r, where
and so to define \({\mathcal {D}\mathcal {S}}_{r}(E)\), we will supplement \(\mathbb P_{r}(E)\subset {\mathcal {D}\mathcal {S}}_{r}(E)\) with the span of \(\frac 12N(N-3)\) linearly independent functions. The quantity \(\frac 12N(N-3)\) can be interpreted as the number of pairs of edges that are not adjacent.
3.1 Shape functions
To define the supplemental basis functions, we have two series of choices for each i,j such that 1 ≤ i < j ≤ N and 2 ≤ j − i ≤ N − 2 (i.e., i and j are nonadjacent). First, as shown in Fig. 2, one must choose two distinct points \(\mathbf {x}^{i,j}_{1}\in {\mathscr{L}}_{i}\) and \(\mathbf {x}^{i,j}_{2}\in {\mathscr{L}}_{j}\) that avoid the intersection point \(\mathbf {x}_{i,j}={\mathscr{L}}_{i}\cap {\mathscr{L}}_{j}\), if it exists. Then let
be the linear function associated to the line \({\mathscr{L}}_{i,j}={\mathscr{L}}[\mathbf {x}^{i,j}_{1},\mathbf {x}^{i,j}_{2}]\). Simple choices are to take the midpoints of the edges, or
although the normalization is not strictly necessary.

Illustration on E5 of the zero line \({\mathscr{L}}_{1,4}\) of \(\lambda _{1,4}(\mathbf {x})=-(\mathbf {x}-\mathbf {x}_{2}^{1,4})\cdot \nu _{1,4}\) and the intersection point \(\mathbf {x}_{1,4}={\mathscr{L}}_{1}\cap {\mathscr{L}}_{4}\), if it exists
Second, one must choose the functions Ri,j to satisfy the properties
These are ± 1 on ei and ej, but arbitrary on the other edges. For example, take the simple rational functions
(note that the denominators do not vanish on EN, since ei and ej are not adjacent).
The supplemental basis functions are then constructed as
and the supplemental space is defined to be
The λi,j’s are not needed when r = N − 2, and \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\) is empty when N = 3. The full space \(\mathcal {P}\) in Definition 2.1 is
Each of our earlier choices gives rise to a distinct family of direct serendipity elements of index r ≥ N − 2 ≥ 1.
3.2 Degrees of freedom
DoFs could be defined in various ways. DoFs based on orthogonal polynomials are generally more numerically stable. However, to ease the exposition and proof of unisolvence, we simply use DoF functionals given by evaluation at (nodal) points.
As depicted in Fig. 3, for vertex DoFs, the nodal points are exactly the vertices xv,i, of EN, where i = 1,2,…,N. For edge DoFs, we simply fix nodal points so that they, plus the two vertices, are equally distributed on each edge. There are r − 1 nodal points on the interior of each edge, which can be denoted xe,i,j, j = 1,2,…,r − 1, for nodal points that lie on edge ei, i = 1,2,…,N, ordered in the counterclockwise direction. The interior cell DoFs can be set, for example, on points of a triangle T strictly inside E, where the set of nodal points is the same as the nodes of the Lagrange element of order r − N on the triangle T. We denote the interior nodal points as xE,i, \(i=1,2,\ldots ,\frac 12(r-N+2)(r-N+1)\).

The nodal points for the DoFs of a direct serendipity finite element E5, for small r
The total number of nodal points is indeed DN,r. If \(\{x_{1}^{\text {nodal}},x_{2}^{\text {nodal}},\ldots ,x_{D_{N,r}}^{\text {nodal}}\}\) is the set of all nodal points, then the set of DOFs (\(\mathcal {N}\) in Definition 2.1) is
3.3 Unisolvence and conformity of the finite element
In this section we will show that we have a properly defined finite element.
Theorem 3.1
The finite element \({\mathcal {D}\mathcal {S}}_{r}(E_{N}) = \mathbb P_{r}(E_{N})\oplus \mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\), for \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\) given by (12), with nodal DoFs (14) is well defined (i.e., unisolvent) when r ≥ N − 2. Moreover, a nodal basis is given by the functions defined below in (20), (23), and (26).
To prove the theorem, we will explicitly construct a basis of shape functions φi for \(\mathcal {P}\) dual to \(\mathcal {N}\). Such shape functions are called nodal basis functions. For a nodal point \(\mathbf {x}^{\text {node}}_{j}\), they have the property that \(N_{j}(\varphi _{i})=\varphi _{i}(\mathbf {x}^{\text {node}}_{j}) = \delta _{ij}\), the Kronecker delta. The unisolvence property (i.e., that \(\mathcal {N}\) is a basis for the dual space) is then immediate. Moreover, it follows from the construction that we obtain global H1 conforming elements by just matching vertex and edge DoFs on the boundaries of the elements; that is, local basis functions merge together continuously to give a global nodal basis for \({\mathcal {D}\mathcal {S}}_{r}={\mathcal {D}\mathcal {S}}_{r}({\Omega })\subset H^{1}({\Omega })\). Our construction directly extends that given in [5] for the case N = 4.
Before beginning the construction, it is convenient to define
so that \(\mathcal {R}_{k,\ell }\) is 1 on edge ek, 0 on eℓ, and arbitrary on the other edges. Let us now set λj,i = λi,j when i < j, and define, for any 1 ≤ k,ℓ ≤ N, 2 ≤|k − ℓ|≤ N − 2,
These lie in \(\mathbb P_{r}(E)\oplus \mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E)\) and satisfy
Moreover,
3.3.1 Interior cell nodal basis functions
For the element EN, we have interior shape functions only when r ≥ N (recall Table 1). These shape functions are
and they vanish on all the edges (i.e., at all edge and vertex nodes). Let \(\{\phi _{E,i}\}\subset \mathbb P_{r-N}\) be a nodal basis for the cell nodes {xE,i}, where \(i=1,2,\ldots ,\dim \mathbb P_{r-N}\). That is, ϕE,i(xE,j) = δij. Our interior cell nodal basis functions are then
3.3.2 Edge nodal basis functions
For \({\mathcal {D}\mathcal {S}}_{r}(E_{N})\), there are r − 1 edge nodes on each edge. To simplify the notation, we construct φe,1,1(x), which is 1 at xe,1,1 and vanishes at all other nodal points. The construction of the other edge nodal basis functions is similar.
For some \(\tilde p\in \mathbb P_{r-N+1}(e_{1})\) (take \(\tilde p = 0\) when r = N − 2) and for some coefficients βj, let
where \(p(\mathbf {x}) = \tilde p((\mathbf {x}-\mathbf {x}_{v,N})\cdot \tau _{1})\) extends \(\tilde p\) to EN constantly in the normal direction to \({\mathscr{L}}_{1}\). This function vanishes on all edges but e1.
Denote
We require that ϕe,1,1(xe,1,n) = δ1,n for n = 1,2,…,r − 1, so the r − 1 coefficients {αℓ,βj} solve the square linear system
Assume for the moment that the function ϕe,1,1 is well defined on EN. It takes the value 1 at xe,1,1 and vanishes at all the other vertex and edge nodes, so we define
The nodal basis functions {φe,i,j : i = 1,2,…,N, j = 1,2,…,r − 1} for the other edge nodes are defined similarly. In Fig. 4, we show an edge nodal basis function for a pentagon. The next Lemma justifies that ϕe,1,1 is well defined on EN.

Plots of the r = 3 basis function for the edge node at \((\frac {1}{3},0)\) of a pentagon
Lemma 3.1
There exists a unique set of coefficients αℓ, ℓ = 0,1,…,r − N + 1, and βj, j = 3,4,…,N − 1, solving the (r − 1) × (r − 1) linear system (22).
Proof
For \(t\in \mathbb {R}\), let x(t) = xv,N + tτ1 and define \(\tilde q(t)\in \mathbb P_{r-2}(e_{1})\) by
We must show that the linear system has a unique solution, which is equivalent to showing that \(\tilde q(t_{e,1,n}) =0\) for all n = 1,2,…,r − 1, then all αℓ = 0 and βj = 0 (j≠N,1,2). Now \(\tilde q(t)\) is a polynomial of degree r − 2, and it vanishes at r − 1 points, so it vanishes identically.
Suppose that the lines through e1 and ej intersect at \(\mathbf {x}_{1,j}={\mathscr{L}}_{1}\cap {\mathscr{L}}_{j}\) for some j≠N,1,2. Since λj(x1,j) = 0, \(\tilde q((\mathbf {x}_{1,j}-\mathbf {x}_{v,N})\cdot \tau _{1})\) reduces to
But λm(x1,j)≠ 0 for all m≠ 1,j and λ1,j(x1,j)≠ 0 by our choice of this linear function, so we conclude that βj = 0.
We have two cases to consider. First, if no edge is parallel to e1 (so the intersection points x1,j exist for all j≠N,1,2), then all the βj vanish. Second, suppose that the lines through e1 and ej are parallel for some j≠N,1,2. No other edges can also be parallel, so we conclude βk = 0 for all k≠j. Moreover, \(\lambda _{j}\vert _{e_{1}}=c>0\) is a strictly positive constant, and so
or
The zero line of λ1,j is transverse to e1 (again by our choice of this linear function), leading us to conclude that \(\lambda _{1,j}^{r-N+2}\) must have strict degree r − N + 2. Therefore, again, all the βj = 0.
We have reduced \(\tilde q(t)=0\) to a positive function times \(\tilde p(t)\), so we must conclude that \(\tilde p(t)=0\). That is, all the αℓ = 0, and the proof is complete. □
3.3.3 Vertex nodal basis functions
For the vertices, since r ≥ N − 2, we can define for each i = 1,2,…,N the shape functions
wherein we interpret indices modulo N. These N functions vanish at all of the edge nodes, and ϕv,i(xv,j) = 0 if i≠j and is positive otherwise. The nodal basis functions are then
A vertex nodal basis function for a pentagon is shown in Fig. 5. This completes the construction of the \(D_{N,r}=\dim \mathbb P_{r}(E_{N})+\frac 12N(N-3)\) nodal basis functions for \(\mathcal {D}\mathcal {S}_{r}(E_{N})\). It also completes the proof of Theorem 3.1.

Plots of the r = 3 basis function for the vertex node at (1,0) of a pentagon
4 Direct serendipity elements when 1 ≤ r < N − 2
There are vertex and possibly edge nodes, but no interior nodes, when 1 ≤ r < N. The total number of DoFs needed for EN is then simply
Our strategy is to define the space as a subset of a higher order direct serendipity space; that is, for some index s such that r < s < N, we define
Theorem 4.1
The finite element (28) with nodal DoFs (14) is well defined (i.e., unisolvent) when r < N − 2 and r < s < N. Moreover,
for some supplemental space of functions \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\), and a nodal basis is given by the functions listed in (33) and defined as in (31) and (32).
As a practical matter, one should take s = N − 2. It is obvious that \(\mathbb P_{r}(E_{N})\subset {\mathcal {D}\mathcal {S}}_{r}^{(s)}(E_{N})\), since \(\mathbb P_{r}(E_{N})\subset \mathbb P_{s}(E_{N})\subset {\mathcal {D}\mathcal {S}}_{s}(E_{N})\) restricts to ∂EN as required. That is, \({\mathcal {D}\mathcal {S}}_{r}^{(s)}(E_{N})\) has the form (29). We prove the rest of the theorem in the next section by constructing a nodal basis.
4.1 Construction of the nodal basis functions when r < N − 2
We construct nodal basis functions for \({\mathcal {D}\mathcal {S}}_{r}(E_{N})\) from \({\mathcal {D}\mathcal {S}}_{s}(E_{N})\) for any r < s < N. To make the notation clear as to which order (r or s) a quantity refers to, we will use a superscript within parentheses. For example, edge node xe,1,1 will be referred to as \(\mathbf {x}_{e,1,1}^{(r)}\) if it is the node in \({\mathcal {D}\mathcal {S}}_{r}(E)\), and \(\mathbf {x}_{e,1,1}^{(s)}\) if it is the node in \({\mathcal {D}\mathcal {S}}_{s}(E)\) (these two nodes are not at the same position).
We first note that for each j = 0,1,…,r, there exists a unique \(\tilde p^{(r)}_{j}(t)\in \mathbb P_{r}([0,1])\) interpolating r + 1 points as
A basis function for edge node \(\mathbf {x}_{e,i,j}^{(r)}\), i = 1,2,…,N and j = 1,2,…,r − 1, is then
which vanishes on all the edges except for ei. Restricted to ei, it is nominally a polynomial of degree s. However, it agrees with \(\tilde p^{(r)}_{j}\) at s + 1 > r + 1 points, so it is in fact a polynomial of degree r on ei. In consequence, \(\varphi ^{(r,s)}_{e,i,j}\in {\mathcal {D}\mathcal {S}}_{r}^{(s)}(E_{N})\), and it vanishes at all nodes of \({\mathcal {D}\mathcal {S}}_{r}^{(s)}(E)\) except \(\mathbf {x}_{e,i,j}^{(r)}\), where it is one (i.e., it is a nodal basis function).
For a vertex node \(\mathbf {x}_{v,i}=\mathbf {x}_{v,i}^{(r)}=\mathbf {x}_{v,i}^{(s)}\), we define
which vanishes on all the edges except ei and ei+ 1. As before, we conclude that it is a polynomial of degree r on edges ei and ei+ 1, and so \(\varphi ^{(r,s)}_{v,i}(\mathbf {x})\in {\mathcal {D}\mathcal {S}}_{r}^{(s)}(E_{N})\). Moreover, it is the nodal basis function for xv,i, since it vanishes at all edge nodes \(\mathbf {x}_{e,k,j}^{(r)}\) of ek, k = i,i + 1, and \(\varphi ^{(r,s)}_{v,i}(\mathbf {x}_{v,i})=1\).
Finally, since there are no interior cell DoFs, we conclude that
which indeed has dimension Nr. This completes the proof of Theorem 4.1.
4.2 A second construction identifying the supplemental function space
From either the definition (28) or from the nodal basis (33), it is difficult to determine the supplemental space \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\) in (29). In this section, we give an explicit construction \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\). In practice, the supplemental space is not needed to implement \({\mathcal {D}\mathcal {S}}_{r}(E_{N})\) (one would simply use (33)); however, as we will see later, it could be used to implement mixed finite elements.
It will be convenient in this section to use a notation that unifies edge and vertex nodes. For each edge index i = 1,2,…,N and j = 0,1,…,r, let
We caution that the vertices are represented twice in this indexing convention. Let the full set of nodal points be denoted
We will divide this set into two disjoint subsets \(\mathcal {A}_{\mathbb P}\) and \(\mathcal {A}_{\mathbb S}=\mathcal {A}\setminus \mathcal {A}_{\mathbb P}\).
The subset of nodes \(\mathcal {A}_{\mathbb P}\) is chosen iteratively as follows, and as depicted in Fig. 6. For each k = r + 1,…,2,1 in descending order, first select a distinct edge ei(k) with index i(k) ∈{1,2,…,N}. At this stage, there are at least N − r + k − 1 > 0 edges left to choose from, since N − r > 2 and k ≥ 1. Second, select k distinct nodes xn,i(k),j(ℓ) on this chosen edge, with the indices j(ℓ) ∈{0,1,…,r} and ℓ = 1,2,…,k. The only restriction is that one may not choose a vertex node that lies on any of the previously chosen edges. Since there are 2 vertex nodes and r − 1 edge nodes, one can always meet this restriction. As a simple example, one can choose edges i(k) = k and take only edge nodes, except for xv,r and xv,r+ 1 on er+ 1 and xv,r− 1 on er.

A choice of nodes \(\mathcal {A}_{\mathbb P}\) and \(\mathcal {A}_{\mathbb S}\) for N = 6, r = 3. And the dashed lines show the choices of zero lines for the construction of ϕn,i(2),j(ℓ), ℓ = 1,2
The total number of nodes in \(\mathcal {A}_{\mathbb P}\) is
The total number of unselected nodes \(\mathcal {A}_{\mathbb S}=\mathcal {A}\setminus \mathcal {A}_{\mathbb P}\) is the same as the dimension of \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\). For each node \(\mathbf {x}_{n,i,j}\in \mathcal {A}_{\mathbb S}\), we construct \(\varphi _{n,i,j}=\varphi _{n,i,j}^{(r,s)}\), the supplemental function associated to xn,i,j as in the previous section. The supplemental space is then
and it has the correct dimension. These basis functions are nodal, by construction.
To verify that (36) is indeed the supplemental space, we finish the construction of the nodal basis (i.e., for nodal points in \(\mathcal {A}_{\mathbb P}\)) by including additional functions only from \(\mathbb P_{r}(E_{N})\). We do this iteratively for each k = 1,2,…,r + 1 in ascending order as follows. For k = 1, we construct the nodal basis function for xn,i(1),j(1) by first defining
which vanishes at all the nodes of \(\mathcal {A}_{\mathbb P}\) except xn,i(1),j(1), where it is one. By the choice of edges, the denominator does not vanish. Then
and this is indeed our nodal basis function for the node xn,i(1),j(1).
For k = 2, we need to construct the nodal basis functions for the two points on the edge ei(2). Note that we have one more point compared to the previous step, but we also have one fewer edge to deal with, since we now have φn,i(1),j(1). Therefore we can construct for each ℓ = 1,2,
where ℓ∗ = 2,1 is the other index. For each ℓ = 1,2, the function vanishes at all the nodes of \(\mathcal {A}_{\mathbb P}\) except xn,i(2),j(ℓ), where it is one. Then let
which give our two desired nodal basis functions on ei(2).
Perhaps the general construction is clear. For k = 1,2,…,r + 1, first define for each ℓ = 1,2,…,k,
and then set
This completes the identification of \({\mathcal {D}\mathcal {S}}_{r}^{(s)}(E_{N})\) as \(\mathbb P_{r}(E_{N})\oplus \mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\) for the supplemental space defined by (36).
5 Approximation properties of \({\mathcal {D}\mathcal {S}}_{r}\)
To obtain global approximation properties, we need to assume that the mesh is uniformly shape regular in some sense. We take the definition due to Girault and Raviart [12, pp. 104–105].
Definition 5.1
For any \(E_{N}\in \mathcal {T}_{h}\), denote by Ti, i = 1,2,…,N(N − 1)(N − 2)/6, the sub-triangle of EN with vertices being three of the N vertices of EN. Define the parameters
A collection of meshes \(\{\mathcal {T}_{h}\}_{h>0}\) is uniformly shape regular if there exists a shape regularity parameterσ∗ > 0, independent of \(\mathcal { T}_{h}\) and h > 0, such that the ratio
A shape regular mesh has the property that every element can take on vertices only in a compact set of possible values (up to translation and rotation). It also has a bound on the number of elements that can share a single vertex. We need the following hypothesis on the construction of the finite elements.
Assumption 5.1
For every \(E_{N}\in \mathcal {T}_{h}\), suppose that the basis functions of \({\mathcal {D}\mathcal {S}}_{r}(E_{N})\) are constructed using λi,j such that the zero set \({\mathscr{L}}_{i,j}\) intersects ei and ej. Moreover, assume that Ri,j are uniformly differentiable functions of the vertices of EN up to order m ≤ r + 1.
Theorem 5.1
Let \(\mathcal {T}_{h}\) be uniformly shape regular with shape regularity parameter σ∗ and let Assumption 5.1 hold. Let \(1\le p\le \infty \) and ℓ > 1/p (or ℓ ≥ 1 if p = 1). Then for r ≥ 1, there exists a constant C = C(r,σ∗) > 0, independent of \(h=\max \limits _{E_{N}\in \mathcal {T}_{h}}h_{E_{N}}\), such that for all functions v ∈ Wℓ,p(Ω),
The proof follows closely that given in [5] for the quadrilateral case and so is omitted here except for discussion of one important issue. The proof uses a continuous dependence argument, relying on the fact that the set of vertices lies in a compact set as well as Assumption 5.1, which ensures that the construction of the finite elements on EN depends continuously on its vertices. The issue that arises when dealing with polygons is settling on a suitable reference configuration, from which the true element of the mesh is a continuous and compact perturbation.
The main argument is illustrated in Fig. 7 for a pentagonal element \(E_{N}=E_{5}\in \mathcal {T}_{h}\) for which, after translation and rotation, xv,1 = (0,0) and xv,2 = (H,0). The reference domain is a regular polygon (equilateral and equiangular) \(\hat E_{N}\) with two fixed vertices \(\hat {\mathbf {x}}_{v,1}=(0,0)\) and \(\hat {\mathbf {x}}_{v,2}=(1,0)\). We need a bijective and smooth map \(\mathbf {F}_{\!\tilde E_{N}}:\hat E_{N}\to \tilde E_{N}=E_{N}/H\) with (ℓ,0) being mapped to (ℓ,0), ℓ = 0,1. In the case of a quadrilateral, one uses a bilinear map. For a polygon, it is probably clear to the reader that such a map \(\mathbf {F}_{\!\tilde E_{N}}:\hat E_{N}\to \tilde E_{N}\) exists. To be rigorous, however, we construct \(\mathbf {F}_{\!\tilde E_{N}}\) using smooth barycentric coordinates \(\{\hat \varphi _{v,i}:i=1,\ldots ,N\}\) on EN [13]. The map is then

An element \(E_{5}\in \mathcal {T}_{h}\) is shown on the right-hand side in its translated and rotated local coordinates. It is the image of a regular reference polygon \(\hat E_{5}\) on the left-hand side. The map is decomposed into one that changes the geometry but not the size \(\mathbf {F}_{\!\tilde E}:\hat E_{5}\to \tilde E_{5}\), and a scaling map \(\tilde {\mathbf {x}}\mapsto H\tilde {\mathbf {x}}\)
6 The de Rham complex and mixed finite elements
The de Rham complex of interest here is
where the curl (or rot) of a scalar function ϕ(x) = ϕ(x1,x2) is \(\text {curl} \phi = \bigg (\frac {\partial \phi }{\partial x_{2}},-\frac {\partial \phi }{\partial x_{1}}\bigg )\). From left to right, the image of one linear map is the kernel of the next.
6.1 Direct mixed finite elements on polygons
For r = 0 and s = 0, as well as for each r = 1,2… and s = r − 1,r, there are important discrete analogues of the de Rham complex involving the direct serendipity spaces and mixed finite element spaces, denoted \({\mathbf {V}_{r}^{s}}(E_{N})\), namely
On triangular and rectangular elements when r ≥ 1, it is known that the classic serendipity space \(\mathcal {S}_{r+1}\) (in place of \({\mathcal {D}\mathcal {S}}_{r+1}\) above) is the precursor of the Brezzi-Douglas-Marini mixed finite element space BDMr [1, 3, 4] (in place of \(\mathbf {V}_{r}^{r-1}\) above). It is also known that on quadrilateral elements, the direct serendipity space is the precursor of the direct mixed spaces [5]. The families of mixed finite elements on EN, N > 4, are new.
To dissect the properties of these new elements, we note two facts. First, the divergence operator takes \(\mathbf {x}\mathbb P_{s}\) one-to-one and onto \(\mathbb P_{s}\). Second, the well-known Helmholtz-like decomposition holds [14]
From (45), we have a reduced (s = r − 1 ≥ 0) and full (s = r) H(div)-approximating mixed finite element space (\(\mathcal {P}\) in Definition 2.1) defined directly on a polygon EN with minimal number of DoFs of the form
with the following definition of the supplemental (vector valued) functions
Similar to [5, 14], the DoFs (\(\mathcal {N}\) in Definition 2.1) for \({\mathbf {v}\in \mathbf {V}_{r}^{s}}(E_{N})\), s = r − 1,r, are given (after fixing a basis for the test functions) by
where dσ is the one dimensional surface measure and the H1(EN) and H(div;EN) bubble functions, for r ≥ N − 1, are
We remark that the edge DoFs (50) determine the normal components (flux) of our vector functions, the divergence DoFs (51) determine the divergence of our vector functions (with the previous edge DoFs), and the curl DoFs (52) control the curl of our vector functions.
Theorem 6.1
The finite element \({\mathbf {V}_{r}^{s}}(E_{N})\) defined by (47)–(48), (49) for r = 1,2… and s = r − 1,r (but s ≥ 0) with DoFs (50)–(52), (53) is well defined (i.e., unisolvent). Moreover, it has the minimal number of DoFs needed of a space of index r that is H(div) conforming and has independent divergence approximation to order s.
Proof
The minimal number of DoFs needed are expressed by (50)–(52), since (50) is required for H(div) conformity of order r and (51) is required for independent divergence approximation to order s. Moreover, (52) is required to control polynomials of degree r which have no divergence nor edge normal flux.
The total number of degrees of freedom is
and the local dimensions of the spaces are
By (6) and (27), these numbers agree. In fact,
The remainder of the proof, to show that these spaces are unisolvent (i.e., a vector function in \({\mathbf {V}^{s}_{r}}{(E_{N})}\) with vanishing DoFs is zero everywhere), is essentially the same as that given in [5] for direct mixed spaces on quadrilaterals. □
6.2 Implementation of the mixed method
The mixed space of vector functions \({\mathbf {V}_{r}^{s}}\) over Ω is defined by merging continuously the normal fluxes across each edge e of the mesh \(\mathcal {T}_{h}\). That is, for r ≥ 0, s = r − 1,r, s ≥ 0,
Associated to this space is the scalar space of its divergences, namely,
It is used, for example, when solving a second order elliptic partial differential equation in mixed form.
6.2.1 Implementation using the hybrid mixed method
The hybrid form of the mixed method is often used [15] so that no globally merged basis is required. A Lagrange multiplier space is used to enforce the normal flux continuity through an additional equation, using the space
The vector functions in \({\mathbf {V}_{r}^{s}}(E_{N})\) can be represented by any of the equivalent forms in (47)–(48). First, since \({\mathbf {V}_{r}^{s}}(E_{N})=\text {curl} {\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\oplus \mathbf {x}\mathbb P_{s}\), we can construct the full space \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\) as discussed in Sections 3 and 4.1, apply the curl operator, and add in \(\mathbf {x}\mathbb P_{s}(E_{N})\). But we can also use the fact that \(\mathbf {V}_{r}^{r-1}(E_{N})={\mathbb P_{r}^{2}}(E_{N})\oplus \mathbb S_{r}^{\mathbf {V}}(E_{N})\) and \({\mathbf {V}_{r}^{r}}(E_{N})={\mathbb P_{r}^{2}}(E_{N})\oplus \mathbf {x}\tilde {\mathbb {P}}_{r}\oplus \mathbb S_{r}^{\mathbf {V}}(E_{N})\), and simply add to the polynomials the supplemental space \(\mathbb S_{r}^{\mathbf {V}}(E_{N})=\text {curl} \mathbb S_{r+1}^{{\mathcal {D}\mathcal {S}}}(E_{N})\). To construct \(\mathbb S_{r+1}^{{\mathcal {D}\mathcal {S}}}(E_{N})\), one uses (11)–(12) when r is large, and otherwise requires the construction given in Section 4.2.
6.2.2 Implementation as an H(div)-conforming mixed space
If an explicit basis for the H(div)-conforming space (57) of vector-valued functions is required, one can proceed as follows. The construction is an extension of the N = 4 case given in [5]. We use the fact that the tangential derivative of a function along an edge ei of an element EN maps by the curl operator to a normal derivative, i.e., for \(\phi \in {\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\),
Since the serendipity spaces are globally continuous, the tangential derivatives will agree across ei, which implies that the global basis functions arising from \({\mathcal {D}\mathcal {S}}_{r+1}({\Omega })\) will be in H(div;Ω).
We construct H(div)-conforming vector basis functions in four sets, related to the edge DoFs (50) with nonconstant test functions, the edge DoFs (50) with constant test functions, the divergence DoFs (51), and the curl DoFs (52).
Basis functions from curls of interior cell basis functions of \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\)
The interior cell basis functions of \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\) are \(\{\varphi _{E,i}^{(r+1)},\ i=1,2,\ldots ,\dim \mathbb P_{r+1-N}\}\) as given by (20) (the superscript is a reminder that the index of the direct serendipity space is r + 1). However, any basis for (19), i.e., the bubble space \(\mathbb B_{r+1}(E_{N})\) defined in (53), suffices. Denote it as \(\{\phi _{E_{N},i}^{(r+1)},\ i=1,2,\ldots ,\dim \mathbb P_{r+1-N}\}\). Then for each \(E_{N}\in \mathcal {T}_{h}\), the global basis functions for \({\mathbf {V}_{r}^{s}}\) are
These exist only when r ≥ N − 1, and they are in fact the H(div) bubble functions \(\mathbb B_{r}^{\mathbf {V}}\) appearing in (53). They have no normal flux and no divergence. They are associated to the curl DoFs (52).
Basis functions from curls of interior edge basis functions of \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\)
The interior edge basis functions of \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\) are \(\{\varphi _{e,i,j}^{(r+1)},\ i=1,2,\ldots ,N,\ j=1,2,\ldots ,r\}\) as given by (23) or (31) when r < N − 2. For r ≥ N − 2, one could use the simpler set \(\{\phi _{e,i,j}^{(r+1)}/\phi _{e,i,j}^{(r+1)}(\mathbf {x}_{e,i,j})\}\) given in (21) which ignores the internal cell DoFs, and we proceed with this choice (the case r < N − 2 is entirely similar). Consider an edge e of the mesh shared by elements Ek and Eℓ with k < ℓ and e locally denoted as edge i1 and i2, respectively. The global basis functions for \({\mathbf {V}_{r}^{s}}\) are, for r ≥ 1 and j = 1,…,r,
These functions have vanishing divergence but nonvanishing normal flux; however, the average normal flux vanishes. They are associated to the edge DoFs (50) with nonconstant test functions.
Basis functions from curls of vertex basis functions of \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\)
We will now construct basis functions that have constant normal flux on a single edge of the mesh. These cannot have vanishing divergence. We will use the vertex basis functions of \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\), which are \(\{\varphi _{v,i}^{(r+1)},\ i=1,2,\ldots ,N\}\) as given in (26) or (32). Again, when r ≥ N − 2 we can instead simply use \(\{\phi _{v,i}^{(r+1)}/\phi _{v,i}^{(r+1)}(\mathbf {x}_{v,i})\}\) given in (25), and we proceed with the discussion using this case. The construction is complicated by the fact that the curls of these functions have nonvanishing normal flux on all the edges of the mesh emanating from the vertex in question.
We work on the element EN, and we first modify the serendipity vertex basis functions so that their restrictions to each edge e of EN is a linear function, i.e., we define for all i
again using indices modulo N. Then define \(\pmb \psi ^{*}_{v,i}=\text {curl} \phi ^{*}_{v,i}\), for which
We also use the vector \(\pmb \psi ^{**}_{v,i}(\mathbf {x}) = \mathbf {x}-\mathbf {x}_{v,i+1}\in \mathbf {x}\mathbb P_{0}(E_{N}){\oplus \mathbb P_{0}^{2}}(E_{N}){\subset \mathbf {V}_{r}^{s}}(E_{N})\), which is in our space and satisfies
which is nonnegative on every edge ej.
For any edge ei of element EN, we define a vector function with flux only on ei by canceling the fluxes of \(\pmb \psi ^{**}_{v,i}\) on all the other edges using some of the \(\pmb \psi ^{*}_{v,k}\). Precisely, we define for edge e = ei of element EN
which has normal flux 1 on ei and 0 on all the other edges. These can be merged across edges to define H(div)-conforming global basis functions, which have constant divergence on each element. Note that the choice of vertex index xv,i+ 1 in \(\pmb \psi ^{**}_{v,i}\) is only for convenience in presenting the construction. We might have chosen it to be any other vertex except xv,i− 1 and xv,i. The basis functions here are associated to the edge DoFs (50) with constant test functions.
Basis functions with nonvanishing and nonconstant divergence
Finally, when s ≥ 1 we define the global basis functions associated to the nonconstant divergences. They are local to each element \(E_{N}\in \mathcal {T}_{h}\). Working on EN, we begin with the functions \(\mathbf {x}\mathbb P_{s}^{*}(E_{N})\), where \(\mathbb P_{s}^{*}(E_{N})={\sum }_{k=1}^{s}\tilde {\mathbb {P}}_{k}(E_{N})\subset \mathbb P_{s}(E_{N})\). Take pi(x) in a basis for \(\mathbb {P}_{s}^{*}(E_{N})\), so \(i=1,\ldots ,\tfrac 12(s+2)(s+1)-1\). We must remove the normal flux on ∂EN from xpi(x). We do this using (62) and (63) by defining
and setting the coefficients αj,k on each edge ej so that
where \(c_{j}=\mathbf {x}\cdot \nu _{j}\vert _{e_{j}}\) is a constant. The coefficients can be found once one realizes that on edge ej, \(\varphi _{e,j,k}^{(r+1)}(x)\big \vert _{e_{j}}=\mathfrak {L}_{k}(t)\), a Lagrange basis polynomial, where x(t) = (1 − t)xv,j− 1 + txv,j for t ∈ [0,1]. Therefore, for k ≥ 1,
and
The coefficients can be read off by substituting in the Lagrange points tℓ = ℓ/(r + 1) for ℓ = 1,…,r + 1. These basis functions are associated to the divergence DoFs (51) with nonconstant local divergence.
The global basis is now fully defined.
7 Approximation properties for \({\mathbf {V}_{r}^{s}}\)
In this section, we state the approximation theory for our new direct mixed finite elements. A discussion and detailed proof for the N = 4 case has been given in [5]. The proof for polygons is very similar, and so omitted here.
We can define a projection operator \(\pi :H(\text {div};{\Omega })\cap (L^{2+\epsilon }({\Omega }))^{2}{\to \mathbf {V}_{r}^{s}}\), s = r − 1,r, where 𝜖 > 0, by piecing together locally defined operators πE. For suitable v, πEv is defined in terms of the DoFs (50)–(52). The operator π satisfies the commuting diagram property [16], which is to say that
where \(\mathcal {P}_{W_{s}}\) is the L2-orthogonal projection operator onto \(W_{s}={\nabla \cdot \mathbf {V}_{r}^{s}}\). The following lemma holds.
Theorem 7.1
Let \(\mathcal {T}_{h}\) be uniformly shape regular with shape regularity parameter σ∗ and let Assumption 5.1 hold. Then for \({\mathbf {V}_{r}^{s}}\) there is a constant C = C(r,σ∗) > 0, independent of h > 0, such that
where s = r − 1 ≥ 0 and s = r ≥ 1 for reduced and full H(div)-approximation, respectively. Moreover, the discrete inf-sup condition
holds for some γ = γ(r,σ∗) > 0 independent of h > 0.
8 Numerical results
We test our finite elements on Poisson’s equation
where f ∈ L2(Ω). The problem can be written in the weak form: Find \(p\in {H_{0}^{1}}({\Omega })\) such that
where (⋅,⋅) is the L2(Ω) inner product. Setting
we have the mixed weak form: Find u ∈ H(div;Ω) and p ∈ L2(Ω) such that
These weak forms give rise to finite element approximations. In view of Theorems 5.1 and 7.1, it is well known that the following theorem holds [17, 18].
Theorem 8.1
Let \(\mathcal {T}_{h}\) be uniformly shape regular with shape regularity parameter σ∗ and let Assumption 5.1 hold. There exists a constant C > 0, depending on r and σ∗ but otherwise independent of \(\mathcal {T}_{h}\) and h > 0, such that
where \(p_{h}\in {\mathcal {D}\mathcal {S}}_{r}({\Omega })\cap {H_{0}^{1}}({\Omega })\) approximates (74) for r ≥ 1. Moreover,
where \((\mathbf {u}_{h},p_{h}){\in \mathbf {V}_{r}^{s}}\times W_{s}\) approximates (76)–(77), for r ≥ 0 and 0 ≤ s = r,r − 1.
We consider the test problem (72)–(73) defined on the unit square Ω = [0,1]2. The exact solution is \(u(x_{1},x_{2}) = \sin \limits (\pi x_{1})\sin \limits (\pi x_{2})\) and the source term is \(f(\mathbf {x}) = 2\pi ^{2}\sin \limits (\pi x_{1})\sin \limits (\pi x_{2})\).
Solutions are computed on two different sequences of meshes, each has n2 elements and is a Voronoi diagram mesh generated using the software package PolyMesher [19]. The first set of meshes, \({\mathcal {T}_{h}^{1}}\), is a simple mesh composed of polygons generated from regularly spaced seeds. The seeds are initially uniformly spaced and then alternatively perturbed up or down in the y-direction by one-quarter of the regular spacing. The number of vertices of each element is N = 4, 5, or 6. The second sequence, \({\mathcal {T}_{h}^{2}}\), is generated by PolyMesher using n2 random initial seeds and up to 10,000 iterations to smooth the mesh. We illustrate these patterns by showing the n = 6 and n = 18 cases in Fig. 8.

Meshes with 6 × 6 and 18 × 18 elements
We give results on each mesh sequence for n = 6, 10, 14, 18, and 22. The maximum, minimum, and average shape regularity parameters are shown in Table 2. Sequence \({\mathcal {T}_{h}^{1}}\) has a fixed maximum and minimum shape regularity parameter; moreover, the average shape regularity parameter decreases and converges to a constant as the number of elements increases. However, since the meshes of \({\mathcal {T}_{h}^{2}}\) are generated randomly, we can see in Fig. 8 that there is no fixed pattern in the shape of the elements, and so the shape regularity parameter varies as well. The n = 18 and 22 meshes seem to be less regular than the other \({\mathcal {T}_{h}^{2}}\) meshes, so to improve the regularity, we removed some of the small edges, creating the “modified \({\mathcal {T}_{h}^{2}}\)” mesh sequence, as described later in Section 8.1.2.
8.1 Direct serendipity spaces
We present in this section convergence studies for the direct serendipity spaces \({\mathcal {D}\mathcal {S}}_{r}\).
8.1.1 Shape regular meshes of mostly hexagons, \({\mathcal {T}_{h}^{1}}\)
Table 3 shows the errors and orders of convergence for the mesh sequence \({\mathcal {T}_{h}^{1}}\) consisting of quadrilaterals, pentagons, and hexagons. The convergence rates are consistent with the theory.
We observed (in results not reported here) that for the same number of elements, the error on a mesh from \({\mathcal {T}_{h}^{1}}\) is smaller compared to a mesh of trapezoids. As n increases, the \({\mathcal {T}_{h}^{1}}\) meshes are refined in a fixed pattern, giving a higher percentage of elements that are hexagons in the interior of the mesh. This observation suggests that elements with more edges might tend to give better approximations.
To test this hypothesis, we graphed the L2 error on each element in Fig. 9 at level n = 10 and 18 with r = 5. The error is indeed concentrated around the boundary, where the quadrilateral and pentagonal elements concentrate. However, the solution \(u(x_{1},x_{2}) = \sin \limits (\pi x_{1})\sin \limits (\pi x_{2})\) on [0,1]2 has a single hump over the domain, so the solution is steepest near the boundary and thus harder to approximate there.

The L2 error on each element for mesh sequence \({\mathcal {T}^{1}_{h}}\) at level n = 10 and n = 18 with approximation index r = 5
We performed two additional tests, with the L2 error on each element shown in Fig. 10. For the first additional test, we solved the same problem on the domain [0,2] × [− 1,1] using a mesh given by reflecting the original n = 18 mesh with respect to x = 1, and then reflecting this with respect to y = 0. This test shows that when the original boundary elements are moved to the interior of the domain, we still observe the same larger error. For the second additional test, we solved the problem on the unit square domain with the original mesh, but we set the exact solution to be \(u(x_{1},x_{2}) = \sin \limits (2\pi x_{1})\sin \limits (2\pi x_{2})\), which has four humps. From the figure, we see that the solution is better approximated in the interior where hexagons are used versus the approximation near the boundary.

The L2 error on each element for the two additional tests based on mesh sequence \({\mathcal {T}^{1}_{h}}\) at level n = 18 with approximation index r = 5
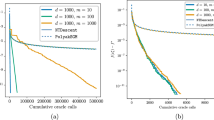
To further verify that hexagons are better at approximation, we performed experiments for index r = 2,3,4,5 at levels n = 6,10,14,18,22 on seven different meshes, each emphasizing a fixed number of edges N for the elements. The first mesh consists of isosceles right triangles, and we distort it with random noise to get the second mesh. The third mesh consists of squares, the fourth mesh is a mesh of identical trapezoids, and the fifth mesh consists of quadrilaterals obtained by randomly distorting the vertices of a square mesh. The sixth mesh is \({\mathcal {T}_{h}^{1}}\) (mostly hexagons), and we distort it with some randomness to get the seventh mesh. To simplify the presentation, we only show results for r = 5 in Fig. 11, since the others are similar. We plot the log of error versus half the log of the number of degrees of freedom for each mesh sequence. We see that for the same number of degrees of freedom, hexagonal elements give the best results, followed by quadrilaterals, with triangular elements giving the worst performance.

Log of the L2-norm and H1-seminorm errors versus half the log of the number of DoFs on seven different mesh sequences with n = 6,10,14,18,22 and r = 5
8.1.2 Not so shape regular meshes of mostly hexagons, \({\mathcal {T}_{h}^{2}}\)
Table 4 presents the errors and orders of convergence for the mesh sequence \({\mathcal {T}_{h}^{2}}\) generated by n2 random initial seeds. We see that the convergence rates are generally correct, but they are not steady due to the randomness inherent in the mesh refinement process. Of particular concern are the rates for n = 18,22, especially as r increases. We attribute this behavior to the poor shape regularity of these two random meshes (recall Table 2).
An examination of the spatial distribution of the error for n = 18, as shown on the left in Fig. 12, suggests that the error is exceptionally large near one corner. The n = 18 mesh has two edges that are relatively very short containing the vertices (0.108,0.050) and (0.890,0.057), and the n = 22 mesh has five short edges. We created the modified \({\mathcal {T}^{2}_{h}}\) meshes by removing one vertex of each short edge. As can be seen in Table 2, the shape regularity parameters of the elements of the modified mesh are more uniform. The right plot in Fig. 12 shows that the error is reduced without the offending edges. The overall error and convergence results for the modified mesh are presented in Table 5, and they are closer to the expected rates.

The L2 error on each element of the domain [0,1]2 for \({\mathcal {T}^{2}_{h}}\) with level n = 18 and approximation index r = 5 before and after modifying the mesh. The two small edges were taken out of the mesh by removing vertices located at (0.108,0.050) and (0.890,0.057)
8.2 Direct mixed spaces
We now consider the direct mixed finite elements \({\mathbf {V}_{r}^{s}}\times W_{s}\) derived in Section 6.2. These are implemented both in hybrid form (Section 6.2.1) and as H(div)-conforming elements (Section 6.2.2), which, of course, provide the same results.
The L2 and H1-seminorm errors and convergence orders for the mesh sequence \({\mathcal {T}_{h}^{1}}\) with r = (0, )1,2,3 appear in Tables 6–7. The theory predicts that the scalar p, the vector u, and the divergence ∇⋅u should attain the order of approximation s + 1, r + 1, and s + 1, respectively, for the reduced (s = r − 1) and full (s = r) H(div)-approximation spaces. We see rates of convergence that are close to the theoretical ones. Moreover, the errors for \({\mathcal {T}_{h}^{1}}\) are a bit smaller than what we see for meshes of trapezoids, due to having many elements with more than four edges.
The errors and orders of convergence of the modified \({\mathcal {T}_{h}^{2}}\) mesh sequence are given in Tables 8–9. We see the expected results.
9 Summary and conclusions
We defined direct serendipity finite elements on general closed, nondegenerate, and convex polygons EN with N vertices for any index of approximation r. A direct serendipity element has its function space of the form of polynomials plus supplemental functions, i.e.,
with the supplemental space \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\) being of minimal local dimension subject to the requirement of global H1-conformity. For higher order finite element spaces with r ≥ N − 2, the supplemental space \(\mathbb S_{r}^{{\mathcal {D}\mathcal {S}}}(E_{N})\) has dimension \(\frac {1}{2}N(N-3)\), which is the number of pairs of nonadjacent edges. This fact inspires our construction (12), for which different choices of λi,j and Ri,j give rise to different spaces. Each index i,j represents a pair of nonadjacent edges ei and ej of EN. Simple choices for λi,j and Ri,j can be made, as given in (8) and (10). The lower order direct serendipity finite element spaces with r < N − 2, are given as the subset of functions in \({\mathcal {D}\mathcal {S}}_{N-2}(E_{N})\) that restrict to polynomials of degree r on ∂EN. Taking nodal DoFs, we constructed nodal bases for the direct serendipity spaces.
By the de Rham theory, each direct serendipity element \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\) gives rise to both a reduced and a full H(div)-approximation direct mixed finite element
respectively, where \(\mathbb S_{r}^{\mathbf {V}}(E) = \text {curl} \mathbb S_{r+1}^{{\mathcal {D}\mathcal {S}}}(E_{N})\) has minimal local dimension subject to the requirement of global H(div)-conformity. These mixed elements can be implemented globally in the hybrid form of the mixed method without the need of a global basis. However, we also provided an explicit conforming global basis that we constructed locally on each EN using the basis of \({\mathcal {D}\mathcal {S}}_{r+1}(E_{N})\).
The convergence theory handled the polygonal geometry through a continuous dependence argument over a compact set of perturbations. Assuming that the meshes are shape regular as h → 0 (Definition 5.1) and that the functions λi,j and Ri,j in (12) are chosen to be continuously differentiable with respect to the vertices of the element (i.e., Assumption 5.1), we obtained optimal approximation rates for the elements in Theorems 5.1 and 7.1.
We presented and discussed numerical results from finite element numerical solutions of Poisson’s equation. The convergence rates were consistent with the theory, Theorem 8.1, and provided confirmation of the optimal order of accuracy of the finite element approximations. We found that mesh shape regularity was quite important in terms of the observed error. In particular, we found that short edges, which lead to a poor (i.e., small) shape regularity parameter, could also result in a poor approximation in that region of the mesh. Removing such edges greatly improved the approximation and convergence rates. We also observed that meshes that emphasize elements with many edges per element outperform meshes with fewer edges per element. This observation, as well as the need for flexible meshing in some applications, can be considered justification for using polygonal elements.
References
Brezzi, F., Douglas, J. Jr., Marini, L.D.: Two families of mixed elements for second order elliptic problems. Numer. Math. 47, 217–235 (1985)
Arnold, D.N., Falk, R.S., Winther, R.: Finite element exterior calculus: from Hodge theory to numerical stability. Bull. Amer. Math. Soc. (N.S.) 47 (2), 281–354 (2010)
Arnold, D.N., Awanou, G.: The serendipity family of finite elements. Found. Comput. Math. 11(3), 337–344 (2011)
Arnold, D.N., Awanou, G.: Finite element differential forms on cubical meshes. Math. Comp. 83, 1551–1570 (2014)
Arbogast, T., Tao, Z., Wang, C.: Direct serendipity and mixed finite elements on convex quadrilaterals. Numerische Mathematik. https://doi.org/10.1007/s00211-022-01274-3 (2022)
Rand, A., Gillette, A., Bajaj, C.: Quadratic serendipity finite elements on polygons using generalized barycentric coordinates. Math. Comp. 83, 2691–2716 (2014)
Sukumar, N.: Quadratic maximum-entropy serendipity shape functions for arbitrary planar polygons. Comput. Methods Appl. Mech. Engrg. 263, 27–41 (2013)
Chen, W., Wang, Y.: Minimal degree H(curl) and H(div) conforming finite elements on polytopal meshes. Math. Comp. 86(307), 2053–2087 (2017)
Floater, M.S., Lai, M.-J.: Polygonal spline spaces and the numerical solution of the poisson equation. SIAM J. Numer. Anal. 54(2), 797–824 (2016)
Beirão da Veiga, L., Brezzi, F., Marini, L., Russo, A.: Serendipity nodal VEM spaces. Comp. Fluids 141, 2–12 (2016)
Ciarlet, P.G.: The Finite Element Method for Elliptic Problems. North-Holland (1978)
Girault, V., Raviart, P.A.: Finite Element Methods for Navier-Stokes Equations: Theory and Algorithms. Springer (1986)
Floater, M.S., Hormann, K., Kós, G.: A general construction of barycentric coordinates over convex polygons. Adv. Comput. Math. 24, 311–331 (2006)
Arbogast, T., Correa, M.R.: Two families of H(div) mixed finite elements on quadrilaterals of minimal dimension. SIAM J. Numer. Anal. 54(6), 3332–3356 (2016). https://doi.org/10.1137/15M1013705
Arnold, D.N., Brezzi, F.: Mixed and nonconforming finite element methods: implementation, postprocessing and error estimates. RAIRO Modél Math. Anal. Numér. 19, 7–32 (1985)
Douglas, J. Jr., Roberts, J.E.: Global estimates for mixed methods for second order elliptic equations. Math. Comp. 44, 39–52 (1985)
Brezzi, F., Fortin, M.: Mixed and Hybrid Finite Element Methods. Springer (1991)
Brenner, S.C., Scott, L.R.: The Mathematical Theory of Finite Element Methods. Springer (1994)
Talischi, C., Paulino, G.H., Pereira, A., Menezes, I.F.M.: Polymesher: a general-purpose mesh generator for polygonal elements written in Matlab. Struct. Multidisc. Optim. 45, 309–328 (2012)
Funding
This work was supported by the U.S. National Science Foundation under grant DMS-2111159.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The first author is currently a member of the editorial board of the journal.
Additional information
Data availability
All pertinent data generated or analyzed during this study are included in this published article. Supporting data omitted from the article are available from the corresponding author on reasonable request. Software was developed by the authors (called directpoly) to implement the finite elements and generate the data. It is available for download from either author’s professional website.
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Arbogast, T., Wang, C. Direct serendipity and mixed finite elements on convex polygons. Numer Algor 92, 1451–1483 (2023). https://doi.org/10.1007/s11075-022-01348-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11075-022-01348-1
Keywords
- Serendipity finite elements
- Direct finite elements
- Optimal approximation
- Polygonal meshes
- Finite element exterior calculus
- Generalized barycentric coordinates