
Abstract
The stability of an interval type-2 (IT2) sampled-data (SD) polynomial fuzzy-model-based control system with a switching control scheme is studied in this paper. The uncertain nonlinear plant is depicted via an IT2 polynomial fuzzy model. To realize control, a switching IT2SD polynomial fuzzy controller is generated. This paper adopts a switching control scheme with a variable sampling period. The modeling domain consists of several sub-domains, and each sub-domain corresponds to a local IT2SD polynomial fuzzy controller. These local IT2SD polynomial fuzzy controllers form the switching IT2SD polynomial fuzzy controller. To aid in the stability analysis, this paper adopts a looped-functional-based technique. The imperfect premise matching concept is brought in to solve the mismatch dilemma caused by the SD control strategy and uncertainties. For decreasing the conservativeness, this paper takes into account the state information as well as the information of IT2 membership functions. The stability analysis is performed for each sub-domain, providing the potential for further relaxation. As polynomials exist in the stability conditions, this paper employs the sum-of-squares method for the stability investigation. The simulation outcomes confirm the efficacy of the proposed method.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
To support the controller synthesis for the plant which is hard to be described because there exist nonlinearities, the Takagi-Sugeno (T-S) fuzzy-model-based (FMB) technique is viewed as a powerful alternative [1]. The T-S fuzzy model combining multiple sub-systems through a weighted sum can be used to depict the nonlinear plant [2]. To implement feedback control, the fuzzy controller which combines multiple sub-controllers through a weighted sum is applied [3, 4]. When the T-S FMB technique is applied, the stability could be investigated via the linear-matrix-inequality (LMI) method.
Recently, the polynomial fuzzy-model-based (PFMB) technique extended from the T-S FMB technique has been extensively utilized to support the controller synthesis [5, 6]. The polynomial fuzzy model is regarded to possess better description capability. For the stability investigation where polynomials are involved, [5, 6] leveraged the sum-of-squares (SOS) method.
The discussion of fuzzy sets is very important for fuzzy control. Type-1 fuzzy sets are popular for handling nonlinearities, but their capability of directly capturing uncertainties is far from enough [7]. To tackle nonlinearities as well as uncertainties, type-2 fuzzy sets were employed [8]. Through the footprint of uncertainty (FOU), the information of uncertainties is able to be seized. Despite the superior capability of capturing uncertainties, the increasing computational complexity is still a problem. Thanks to the appearance of interval type-2 (IT2) fuzzy sets, not only can the information of nonlinearities and uncertainties be seized, but also the computational burden can be reduced at the same time [8, 9]. In [10], an IT2FMB control system was put forward. [11] then further proposed an IT2PMFB control system.
The alleviation of the conservativeness of stability conditions is a key target in the design. To realize it, the parallel distributed compensation (PDC) approach was used [4]. However, the PDC approach requires the membership functions (MFs) and the number of rules of the fuzzy controller to be consistent with those of the fuzzy model, which results in weak design flexibility [12]. Given this, the following works were done. In [13], the membership-function-dependent (MFD) approach was used for alleviating the conservativeness. [14] put forward an imperfect premise matching (IPM) concept. Under the IPM concept, it can be flexible in determining the MFs and the number of rules of the fuzzy controller. Then, large amounts of works adopting the MFD approach as well as the IPM concept were proposed [7, 15,16,17]. In some papers, the switching control is also regarded as a great option to relax the stability conditions. For example, in [18], a switching sampled-data (SD) control approach was applied to relax results. In [19], a switching polynomial fuzzy controller accompanying a switching polynomial Lyapunov function was put forward for relaxation.
Along with the rapid advancements in digital technology as well as other related technologies, the SD control strategy has found extensive applications [20,21,22]. In the SD control strategy, the control input is in staircase form, which makes the stability analysis extremely difficult [23]. For the facilitation of the stability analysis, many techniques were applied, like the looped-functional-based technique, the input delay technique, etc. [24,25,26,27,28]. Till now, there have been many excellent achievements regarding the SD control strategy. [29] applied the aperiodic SD control strategy to the networked control systems taking into account time-varying delays. In [30], the mode-dependent aperiodic SD control strategy was proposed for delayed error stochastic Markovian jump neural networks. [31] analyzed the stability of the Itô stochastic systems incorporating time-delays under the aperiodic SD control strategy. However, the IT2PFMB control system that adopts both the SD control strategy and switching control scheme has not been considered.
This study implements the stability investigation of an interval type-2 sampled-data polynomial fuzzy-model-based (IT2SDPFMB) control system with a switching control scheme. In the study, a switching control scheme with a variable sampling period is carried out. The modeling domain consists of some sub-domains. If the system is within a sub-domain and does not transit from the sub-domain to another sub-domain, the sampler will sample every interval \(h_s\), and a corresponding local IT2SD polynomial fuzzy controller will be chosen; if the system transits from one sub-domain to another sub-domain, the sampler will sample immediately, and a local IT2SD polynomial fuzzy controller corresponding to the new sub-domain will be chosen to generate the new control input. These local IT2SD polynomial fuzzy controllers compose the switching IT2SD polynomial fuzzy controller. A looped-functional-based technique is applied to the analysis, and then the information between \(t_k\) and t can be used. Due to the mismatch dilemma caused by the SD control strategy and uncertainties, the PDC approach cannot be implemented. Given this situation, the IPM concept as well as the MFD approach are applied. For relaxing the stability conditions, the information of IT2 MFs is utilized. For further relaxation, the state information is also considered [23]. In addition, the stability conditions have the potential to be more relaxed by the switching control scheme.
Listed below are the primary contributions:
-
(1)
The stability of an IT2SDPFMB control system with a switching control scheme is investigated for the first time.
-
(2)
The IPM concept is employed to promote flexibility by freely determining the MFs and the number of rules of the switching IT2SD polynomial fuzzy controller. In addition, the implementation cost can be reduced by granting the simpler shape of MFs and the smaller number of rules to the switching IT2SD polynomial fuzzy controller.
-
(3)
An MFD switching IT2SD polynomial fuzzy controller design considering the information between \(t_k\) and t, the state information, the information of IT2 MFs and the switching control scheme with a variable sampling period is proposed, which can achieve less conservative results.
-
(4)
The SOS-based conditions presented in this paper are first developed to guarantee the stability of the IT2SDPFMB control system where a switching control scheme with a variable sampling period is considered.
Below is an outline of the remaining sections in this paper. Section 2 introduces the preliminary knowledge. Section 3 presents the main results. Section 4 reveals the efficacy of the proposed method through the simulation outcomes. A conclusion has been drawn in Section 5.
Notations: The monomial in \(\zeta (t)=\left[ \varsigma _1(t)\text { }\varsigma _2(t)\text { } \cdots \right. \)\(\left. \text { }\varsigma _n(t)\right] ^T\) is considered to be \(\varsigma _1^{o_1}(t)\varsigma _2^{o_2}(t)\cdots \varsigma _n^{o_n}(t)\) in which \(o_i\ge 0\), \(i=1\), 2, \(\cdots \) n, denotes the integer. \(\mathfrak {o}=\sum _{i=1}^n o_i\) represents the degree of a monomial. A polynomial \(e\left( \zeta (t)\right) \) denotes an SOS when \(e\left( \zeta (t)\right) =\sum _{j=1}^m f_j^2\left( \zeta (t)\right) \) where \(f_j\left( \zeta (t)\right) \) is the polynomial, \(m>0\) denotes an integer. Clearly, \(e\left( \zeta (t)\right) \ge 0\) when \(e\left( \zeta (t)\right) \) denotes an SOS. Superscript “T” represents the transposition of a matrix and superscript “\(-1\)” signifies the inverse of a matrix, “\({\textbf {0}}_{m\times n}\)” signifies the \(m \times n\) zero matrix and “\({\textbf {I}}_{m}\)” represents the \(m \times m\) identity matrix. “\(Sym\left\{ {\textbf {C}}\right\} \)” is equivalent to \({\textbf {C}}+{\textbf {C}}^T\).
2 Preliminaries
2.1 IT2 polynomial fuzzy model
The \(i_{th}\) rule of the IT2 polynomial fuzzy model with p rules is shown below [7, 19]:
in which \(\tilde{M}_\alpha ^i\) represents the \(i_{th}\) rule’s IT2 fuzzy term that corresponds to the function \(f{_\alpha }(\zeta (t))\), where i is from 1 to p and \(\alpha \) is from 1 to \(\varPsi \), \(p>0\) and \(\varPsi >0\) are integers; \(\zeta (t)=\left[ \varsigma _1(t)\text { }\varsigma _2(t)\text { } \cdots \text { }\varsigma _n(t)\right] ^T\) represents the state vector; \(\check{\zeta }\left( \zeta (t)\right) =\left[ \check{\varsigma }_1\left( \zeta (t)\right) \text { }\check{\varsigma }_2\left( \zeta (t)\right) \text { } \cdots \text { }\check{\varsigma }_N\left( \zeta (t)\right) \right] ^T\) represents the vector of the monomials in \(\zeta (t)\); \({\textbf {u}}(t)=\left[ \mathfrak {u}_1(t)\text { }\mathfrak {u}_2(t)\text { } \cdots \text { }\mathfrak {u}_m(t)\right] ^T\) represents the input vector; \({\textbf {A}}_i\left( \zeta (t)\right) \in \mathfrak {R}^{n\times N}\) that represents the polynomial system matrix and \({\textbf {B}}_i\left( \zeta (t)\right) \in \mathfrak {R}^{n\times m}\) that represents the polynomial input matrix have been given. Through the proper selection of \(\check{\zeta }\left( \zeta (t)\right) \), the condition \(\check{\zeta }\left( \zeta (t)\right) ={\textbf {0}}\) if and only if \(\zeta (t)={\textbf {0}}\) is considered. The \(i_{th}\) rule’s firing strength is shown below:
in which \(\underline{w}_i\left( \zeta (t)\right) \) that signifies the lower grade of membership equals \(\prod _{\alpha =1}^\varPsi \underline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \), \(\underline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \) signifies the lower MF; \(\overline{w}_i\left( \zeta (t)\right) \) that signifies the upper grade of membership equals \(\prod _{\alpha =1}^\varPsi \) \(\overline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \), \(\overline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \) signifies the upper MF; \(\underline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \) and \(\overline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \) satisfy \(0\le \underline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \) \(\le \overline{\mu }_{\tilde{M}_\alpha ^i}\left( f{_\alpha }\left( \zeta (t)\right) \right) \le 1\), then we have \(0\le \underline{w}_i\left( \zeta (t)\right) \le \overline{w}_i\left( \zeta (t)\right) \le 1\).
Finally, we have
where
in which \(\tilde{w}_i\left( \zeta (t)\right) \) is nonnegative, \(\sum _{i=1}^p\tilde{w}_i\left( \zeta (t)\right) =1\), \(\underline{\lambda }_i\left( \zeta (t)\right) \) and \(\overline{\lambda }_i\left( \zeta (t)\right) \) both lie between zero (inclusive) and one (inclusive), the sum of \(\underline{\lambda }_i\left( \zeta (t)\right) \) and \(\overline{\lambda }_i\left( \zeta (t)\right) \) is one, for \(\forall i\), functions \(\underline{\lambda }_i\left( \zeta (t)\right) \) and \(\overline{\lambda }_i\left( \zeta (t)\right) \) are not demanded to be given.
2.2 Switching IT2SD polynomial fuzzy controller
A switching control scheme with a variable sampling period is considered in this work. Suppose the modeling domain \(\varUpsilon \) includes \(\hat{L}\) sub-domains, in other words, \(\varUpsilon =\bigcup ^{\hat{L}}_{l=1}\varUpsilon _l\), where \(\hat{L}>0\) denotes an integer. A corresponding local IT2SD polynomial fuzzy controller will be chosen if the system is within the sub-domain \(\varUpsilon _l\).
The \(j_{th}\) rule of the switching IT2SD polynomial fuzzy controller with c rules is shown below [7, 19]:
in which \(\tilde{N}_\beta ^j\) represents the \(j_{th}\) rule’s IT2 fuzzy term that corresponds to the function \(g{_\beta }\left( \zeta (t_k)\right) \), where j is from 1 to c, l is from 1 to \(\hat{L}\) and \(\beta \) is from 1 to \(\varOmega \), \(c>0\) and \(\varOmega >0\) are integers, \(k =\) 0,..., \(\infty \). \({\textbf {G}}_{jl} \in \mathfrak {R}^{m\times N}\) represents the feedback gain matrix which will be obtained. The \(j_{th}\) rule’s firing strength is below:
in which \(\underline{m}_j\left( \zeta (t_k)\right) \) that signifies the lower grade of membership equals \(\prod _{\beta =1}^\varOmega \underline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \), \(\underline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \) signifies the lower MF; \(\overline{m}_j\left( \zeta (t_k)\right) \) that signifies the upper grade of membership equals \(\prod _{\beta =1}^\varOmega \) \(\overline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \), \(\overline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \) signifies the upper MF; \(\underline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \) and \(\overline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \) satisfy \(0\le \underline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \) \(\le \overline{\mu }_{\tilde{N}_\beta ^j}\left( g{_\beta }\left( \zeta (t_k)\right) \right) \) \(\le 1\), then we have \(0\le \underline{m}_j\left( \zeta (t_k)\right) \le \overline{m}_j\left( \zeta (t_k)\right) \) \(\le 1\).
Finally, we have
where
in which \(\tilde{m}_j\left( \zeta (t_k)\right) \) is nonnegative, \(\sum _{j=1}^c\tilde{m}_j\left( \zeta (t_k)\right) =1\), \(\underline{\kappa }_j\left( \zeta (t_k)\right) \) and \(\overline{\kappa }_j\left( \zeta (t_k)\right) \) both lie between zero (inclusive) and one (inclusive), the sum of \(\underline{\kappa }_j\left( \zeta (t_k)\right) \) and \(\overline{\kappa }_j\left( \zeta (t_k)\right) \) is one, for \(\forall j\), \(\underline{\kappa }_j\left( \zeta (t_k)\right) \) and \(\overline{\kappa }_j\left( \zeta (t_k)\right) \) are functions to be provided. \(h_s\ge h_k=t_{k+1}- t_k>0\) and \(h_s\) signifies the largest sampling interval.
Lemma 1
[32] Let z: \([l,\text { }u]\rightarrow \mathfrak {R}^{n}\) be a vector function, where l and u are both scalars and \(l<u\). For a vector \(\xi \in \mathfrak {R}^{m}\), matrix \({\textbf {K}} \in \mathfrak {R}^{m\times n}\) and positive definite matrix \({\textbf {J}}={\textbf {J}}^T \in \mathfrak {R}^{n\times n}\), then
3 Main results
The IT2SDPFMB control system with a switching control scheme shown as below can be obtained based on (3), (7), and \(\sum _{i=1}^p\tilde{w}_i\left( \zeta (t)\right) =\sum _{j=1}^c\tilde{m}_j\left( \zeta (t_k)\right) =\sum _{i=1}^p\sum _{j=1}^c\tilde{w}_i\left( \zeta (t)\right) \) \(\times \tilde{m}_j\left( \zeta (t_k)\right) =1\),
Consider \(\dot{\check{\zeta }}\left( \zeta (t)\right) \) as below:
in which \({\textbf {U}}\left( \zeta (t)\right) \in \mathfrak {R}^{N\times n}\) whose \(\alpha \beta _{th}\) element is shown below:
To be further, we have
where \(\acute{{\textbf {A}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {A}}_i\left( \zeta (t)\right) \) and \(\acute{{\textbf {B}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) \) \({\textbf {B}}_i\left( \zeta (t)\right) \).
To simplify representations, define \(\varvec{\varpi }=\)\( \left[ {\begin{array}{*{20}{c}} \check{\zeta }^T\left( \zeta (t)\right)&\dot{\check{\zeta }}^T\left( \zeta (t)\right)&\check{\zeta }^T\left( \zeta (t_k)\right) \end{array}} \right] ^T\), \({\textbf {E}}_1= \left[ {\begin{array}{*{20}{c}} {\textbf {I}}_{N}&{\textbf {0}}_{N\times 2N } \end{array}} \right] \), \({\textbf {E}}_2=\left[ {\begin{array}{*{20}{c}} {\textbf {0}}_{N\times N}&{\textbf {I}}_{N}&{\textbf {0}}_{N\times N } \end{array}} \right] \), \({\textbf {E}}_3=\left[ {\begin{array}{*{20}{c}} {\textbf {0}}_{N\times 2N}&{\textbf {I}}_{N} \end{array}} \right] \).
3.1 MFI stability analysis and controller design
Theorem 1
Suppose \({\textbf {G}}_{jl}\) in (7) is known beforehand. The IT2SDPFMB control system with a switching control scheme formed by an uncertain nonlinear plant depicted via the IT2 polynomial fuzzy model (3) as well as the switching IT2SD polynomial fuzzy controller (7) composed of several local IT2SD polynomial fuzzy controllers can be deemed asymptotically stable, when there exist matrices \({\textbf {P}}={\textbf {P}}^{T} \in \mathfrak {R}^{N\times N}\), \({\textbf {S}}={\textbf {S}}^{T} \in \mathfrak {R}^{N\times N} \), \({\textbf {R}}_1={\textbf {R}}_1^T \in \mathfrak {R}^{N\times N} \), \({\textbf {R}}_2 \in \mathfrak {R}^{N\times N} \), \({\textbf {M}}={\textbf {M}}^T \in \mathfrak {R}^{N\times N}\), \({\textbf {Q}} \in \mathfrak {R}^{3N\times N} \) and \(\tilde{{\textbf {X}}} \in \mathfrak {R}^{N\times N}\) satisfying the SOS-based conditions below for \(i = 1,\text { }\dots ,\text { } p;\) \(j=1,\text { }\dots ,\text { }c;\) \(l=1,\text { }\dots ,\text { }\hat{L}\):
in which \(\varrho _1 \in \mathfrak {R}^{N}\), \(\varrho _2 \in \mathfrak {R}^{3N}\) as well as \(\varrho _3 \in \mathfrak {R}^{4N}\) represent arbitrary vectors not dependent of \(\zeta (t)\); user-defined \(\epsilon _1>0\), \(\epsilon _2>0\), \(\epsilon _{\hat{f}}\left( \zeta (t)\right) >0\), \({\hat{f}}\) is from 3 to 5; scalars \(h_s\), \(\varkappa _{1}\), \(\varkappa _{2}\) and \(\varkappa _{3}\) are predetermined; \(\acute{{\textbf {A}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {A}}_i\left( \zeta (t)\right) \), \(\acute{{\textbf {B}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {B}}_i\left( \zeta (t)\right) \), \({\textbf {U}}\left( \zeta (t)\right) \in \mathfrak {R}^{N\times n}\) in which \(U_{\alpha \beta }\left( \zeta (t)\right) =\frac{\partial \check{\varsigma }_{\alpha }\left( \zeta (t)\right) }{\partial {\varsigma }_{\beta }(t)}\), \(\alpha \) is from 1 to N and \(\beta \) is from 1 to n; furthermore,
Proof
Please see Appendix A.
Theorem 2 as below is derived based on Theorem 1 to get the switching IT2SD polynomial fuzzy controller. \(\square \)
Theorem 2
The IT2SDPFMB control system with a switching control scheme formed by an uncertain nonlinear plant depicted via the IT2 polynomial fuzzy model (3) as well as the switching IT2SD polynomial fuzzy controller (7) composed of several local IT2SD polynomial fuzzy controllers can be deemed asymptotically stable, when there exist matrices \({\textbf {X}} \in \mathfrak {R}^{N\times N}\), \(\grave{{\textbf {P}}}=\grave{{\textbf {P}}}^{T} \in \mathfrak {R}^{N\times N}\), \(\grave{{\textbf {S}}}=\grave{{\textbf {S}}}^{T} \in \mathfrak {R}^{N\times N} \), \(\grave{{\textbf {R}}}_1=\grave{{\textbf {R}}}_1^T \in \mathfrak {R}^{N\times N} \), \(\grave{{\textbf {R}}}_2 \in \mathfrak {R}^{N\times N} \), \(\grave{{\textbf {M}}}=\grave{{\textbf {M}}}^T \in \mathfrak {R}^{N\times N}\), \(\grave{{\textbf {Q}}} \in \mathfrak {R}^{3N\times N} \) and \({\textbf {N}}_{jl} \in \mathfrak {R}^{m\times N}\) satisfying the SOS-based conditions below for \(i = 1,\text { }\dots ,\text { } p;\) \(j=1,\text { }\dots ,\text { }c;\) \(l=1,\text { }\dots ,\text { }\hat{L}\):
in which \(\varrho _1 \in \mathfrak {R}^{N}\), \(\varrho _2 \in \mathfrak {R}^{3N}\) as well as \(\varrho _3 \in \mathfrak {R}^{4N}\) represent arbitrary vectors not dependent of \(\zeta (t)\); user-defined \(\epsilon _1>0\), \(\epsilon _2>0\), \(\epsilon _{\hat{f}}\left( \zeta (t)\right) >0\), \({\hat{f}}\) is from 3 to 5; scalars \(h_s\), \(\varkappa _{1}\), \(\varkappa _{2}\) and \(\varkappa _{3}\) are predetermined; \(\acute{{\textbf {A}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {A}}_i\left( \zeta (t)\right) \), \(\acute{{\textbf {B}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {B}}_i\left( \zeta (t)\right) \), \({\textbf {U}}\left( \zeta (t)\right) \in \mathfrak {R}^{N\times n}\) in which \(U_{\alpha \beta }\left( \zeta (t)\right) =\frac{\partial \check{\varsigma }_{\alpha }\left( \zeta (t)\right) }{\partial {\varsigma }_{\beta }(t)}\), \(\alpha \) is from 1 to N and \(\beta \) is from 1 to n; furthermore,
\({\textbf {G}}_{jl}\) is given by:
Proof
Please see Appendix B. \(\square \)
3.2 MFD stability analysis and controller design
Theorem 3
Suppose \({\textbf {G}}_{jl}\) in (7) is known beforehand. The IT2SDPFMB control system with a switching control scheme formed by an uncertain nonlinear plant depicted via the IT2 polynomial fuzzy model (3) as well as the switching IT2SD polynomial fuzzy controller (7) composed of several local IT2SD polynomial fuzzy controllers can be deemed asymptotically stable, when there exist matrices \({\textbf {P}}={\textbf {P}}^{T} \in \mathfrak {R}^{N\times N}\), \({\textbf {S}}={\textbf {S}}^{T} \in \mathfrak {R}^{N\times N} \), \({\textbf {R}}_1={\textbf {R}}_1^T \in \mathfrak {R}^{N\times N} \), \({\textbf {R}}_2 \in \mathfrak {R}^{N\times N} \), \({\textbf {M}}={\textbf {M}}^T \in \mathfrak {R}^{N\times N}\), \({\textbf {Q}} \in \mathfrak {R}^{3N\times N}\), \(\tilde{{\textbf {X}}} \in \mathfrak {R}^{N\times N}\), \( \underline{{\textbf {H}}}_{ijl}\left( \zeta (t)\right) =\underline{{\textbf {H}}}^T_{ijl}\left( \zeta (t)\right) \in \mathfrak {R}^{3N\times 3N}\), \( \overline{{\textbf {H}}}_{ijl}\left( \zeta (t)\right) =\overline{{\textbf {H}}}^T_{ijl}\left( \zeta (t)\right) \in \mathfrak {R}^{3N\times 3N}\) and \( {\textbf {Y}}_l\left( \zeta (t)\right) ={\textbf {Y}}_l^T\left( \zeta (t)\right) \) \( \in \mathfrak {R}^{3N\times 3N}\) satisfying the SOS-based conditions below for \(i = 1,\text { }\dots ,\) p; \(j=1,\text { }\dots ,\text { }c;\) \(l=1,\text { }\dots ,\) \(\hat{L}\):
in which \(\varrho _1 \in \mathfrak {R}^{N}\), \(\varrho _2 \in \mathfrak {R}^{3N}\) as well as \(\varrho _3 \in \mathfrak {R}^{4N}\) represent arbitrary vectors not dependent of \(\zeta (t)\); user-defined \(\epsilon _1>0\), \(\epsilon _2>0\), \(\epsilon _{\hat{f}}\left( \zeta (t)\right) \ge 0\), \({\hat{f}}\) is from 3 to 5, \(\epsilon _{\hat{r}}\left( \zeta (t)\right) >0\), \({\hat{r}}\) is from 6 to 8; \(\underline{\delta }_{ijl}=\underline{w}_{il}\underline{m}_{jl}\), \(\overline{\delta }_{ijl}=\overline{w}_{il}\overline{m}_{jl}\); scalars \(h_s\), \(\varkappa _{1}\), \(\varkappa _{2}\), \(\varkappa _{3}\), \(\underline{w}_{il}\), \(\overline{w}_{il}\), \(\underline{m}_{jl}\), \(\overline{m}_{jl}\), vectors \(\underline{\zeta }_l \in \mathfrak {R}^{n}\), \(\overline{\zeta }_l \in \mathfrak {R}^{n}\) and the diagonal matrix \({\textbf {T}} \in \mathfrak {R}^{n\times n}\) are predetermined; \(\acute{{\textbf {A}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {A}}_i\left( \zeta (t)\right) \), \(\acute{{\textbf {B}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {B}}_i\left( \zeta (t)\right) \), \({\textbf {U}}\left( \zeta (t)\right) \in \mathfrak {R}^{N\times n}\) in which \(U_{\alpha \beta }\left( \zeta (t)\right) =\frac{\partial \check{\varsigma }_{\alpha }\left( \zeta (t)\right) }{\partial {\varsigma }_{\beta }(t)}\), \(\alpha \) is from 1 to N and \(\beta \) is from 1 to n; furthermore,
Proof
Please see Appendix C.\(\square \)
Theorem 4 as below is derived based on Theorem 3 to get the switching IT2SD polynomial fuzzy controller.
Theorem 4
The IT2SDPFMB control system with a switching control scheme formed by an uncertain nonlinear plant depicted via the IT2 polynomial fuzzy model (3) as well as the switching IT2SD polynomial fuzzy controller (7) composed of several local IT2SD polynomial fuzzy controllers can be deemed asymptotically stable, when there exist matrices \({\textbf {X}} \in \mathfrak {R}^{N\times N}\), \(\grave{{\textbf {P}}}=\grave{{\textbf {P}}}^{T} \in \mathfrak {R}^{N\times N}\), \(\grave{{\textbf {S}}}=\grave{{\textbf {S}}}^{T} \in \mathfrak {R}^{N\times N} \), \(\grave{{\textbf {R}}}_1=\grave{{\textbf {R}}}_1^T \in \mathfrak {R}^{N\times N} \), \(\grave{{\textbf {R}}}_2 \in \mathfrak {R}^{N\times N} \), \(\grave{{\textbf {M}}}=\grave{{\textbf {M}}}^T \in \mathfrak {R}^{N\times N}\), \(\grave{{\textbf {Q}}} \in \mathfrak {R}^{3N\times N} \), \( \grave{\underline{{\textbf {H}}}}_{ijl}\left( \zeta (t)\right) =\grave{\underline{{\textbf {H}}}}^T_{ijl}\left( \zeta (t)\right) \in \mathfrak {R}^{3N\times 3N}\), \( \grave{\overline{{\textbf {H}}}}_{ijl}\left( \zeta (t)\right) =\grave{\overline{{\textbf {H}}}}^T_{ijl}\left( \zeta (t)\right) \in \mathfrak {R}^{3N\times 3N}\), \( \grave{{\textbf {Y}}}_l\left( \zeta (t)\right) =\grave{{\textbf {Y}}}_l^T\left( \zeta (t)\right) \in \mathfrak {R}^{3N\times 3N}\) and \({\textbf {N}}_{jl} \in \mathfrak {R}^{m\times N}\) satisfying the SOS-based conditions below for \(i = 1,\text { }\dots ,\text { } p;\) \(j=1,\text { }\dots ,\text { }c;\text { }l=1,\text { }\dots ,\text { }\hat{L}\):
in which \(\varrho _1 \in \mathfrak {R}^{N}\), \(\varrho _2 \in \mathfrak {R}^{3N}\) as well as \(\varrho _3 \in \mathfrak {R}^{4N}\) represent arbitrary vectors not dependent of \(\zeta (t)\); user-defined \(\epsilon _1>0\), \(\epsilon _2>0\), \(\epsilon _{\hat{f}}\left( \zeta (t)\right) \ge 0\), \({\hat{f}}\) is from 3 to 5, \(\epsilon _{\hat{r}}\left( \zeta (t)\right) >0\), \({\hat{r}}\) is from 6 to 8; \(\underline{\delta }_{ijl}=\underline{w}_{il}\underline{m}_{jl}\), \(\overline{\delta }_{ijl}=\overline{w}_{il}\overline{m}_{jl}\); scalars \(h_s\), \(\varkappa _{1}\), \(\varkappa _{2}\), \(\varkappa _{3}\), \(\underline{w}_{il}\), \(\overline{w}_{il}\), \(\underline{m}_{jl}\), \(\overline{m}_{jl}\), vectors \(\underline{\zeta }_l \in \mathfrak {R}^{n}\), \(\overline{\zeta }_l \in \mathfrak {R}^{n}\) and the diagonal matrix \({\textbf {T}} \in \mathfrak {R}^{n\times n}\) are predetermined; \(\acute{{\textbf {A}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {A}}_i\left( \zeta (t)\right) \), \(\acute{{\textbf {B}}}_i\left( \zeta (t)\right) ={\textbf {U}}\left( \zeta (t)\right) {\textbf {B}}_i\left( \zeta (t)\right) \), \({\textbf {U}}\left( \zeta (t)\right) \in \mathfrak {R}^{N\times n}\) in which \(U_{\alpha \beta }\left( \zeta (t)\right) =\frac{\partial \check{\varsigma }_{\alpha }\left( \zeta (t)\right) }{\partial {\varsigma }_{\beta }(t)}\), \(\alpha \) is from 1 to N and \(\beta \) is from 1 to n; furthermore,
\({\textbf {G}}_{jl}\) is given by:
Proof
Please see Appendix D. \(\square \)
4 Simulation example
For the demonstration of the efficacy of the proposed method, the simulation outcomes are presented below.
Take into account the IT2 polynomial fuzzy model below for depicting an uncertain nonlinear plant,
where the IT2 MFs are defined as [33]: \(\underline{w}_1({\varsigma _1}(t))=\underline{\mu }_{\tilde{M}_1^1}({\varsigma _1}(t))\) \(=1-\frac{1}{1+e^{-{\varsigma _1}(t)-3.5}}\), \(\underline{w}_3({\varsigma _1}(t))=\)\(\underline{\mu }_{\tilde{M}_1^3}({\varsigma _1}(t)) =\frac{1}{1+e^{-{\varsigma _1}(t)+3.5}}\) and \(\overline{w}_2({\varsigma _1}(t))=\overline{\mu }_{\tilde{M}_1^2}({\varsigma _1}(t)) =1-\underline{\mu }_{\tilde{M}_1^1}({\varsigma _1}(t))-\underline{\mu }_{\tilde{M}_1^3}({\varsigma _1}(t))\); \(\overline{w}_1({\varsigma _1}(t))=\overline{\mu }_{\tilde{M}_1^1}({\varsigma _1}(t))\) \(=1-\frac{1}{1+e^{-{\varsigma _1}(t)-2.5}}\), \(\overline{w}_3({\varsigma _1}(t))= \) \(\overline{\mu }_{\tilde{M}_1^3}({\varsigma _1}(t))=\frac{1}{1+e^{-{\varsigma _1}(t)+2.5}}\) and \(\underline{w}_2({\varsigma _1}(t))=\underline{\mu }_{\tilde{M}_1^2}({\varsigma _1}(t))=1-\overline{\mu }_{\tilde{M}_1^1}({\varsigma _1}(t))-\overline{\mu }_{\tilde{M}_1^3}({\varsigma _1}(t))\). In addition, the modeling domain of \({\varsigma _1}(t)\) is \([-10\text {, } 10]\).
Take into account a 2-rule switching IT2SD polynomial fuzzy controller for control. Select its IT2 MFs to be [33]: \(\underline{m}_1(\varsigma _1(t_k))\) \(=\underline{\mu }_{\tilde{N}_1^1}(\varsigma _1(t_k))=\{1\) for \(\varsigma _1(t_k) < -5.5\); \(\frac{-\varsigma _1(t_k)+4.5}{10}\) for \(-5.5 \le \varsigma _1(t_k) \le 4.5\); 0 for \(\varsigma _1(t_k) > 4.5\}\), and \(\overline{m}_2(\varsigma _1(t_k))=\overline{\mu }_{\tilde{N}_1^2}(\varsigma _1(t_k))\) \(=1-\underline{\mu }_{\tilde{N}_1^1}(\varsigma _1(t_k))\); \(\overline{m}_1(\varsigma _1(t_k))=\overline{\mu }_{\tilde{N}_1^1}(\varsigma _1(t_k))=\{1\) for \(\varsigma _1(t_k) < -4.5\); \(\frac{-\varsigma _1(t_k)+5.5}{10}\) for \(-4.5 \le \varsigma _1(t_k) \le 5.5\); 0 for \(\varsigma _1(t_k) > 5.5\}\), \(\underline{m}_2(\varsigma _1(t_k))=\underline{\mu }_{\tilde{N}_1^2}(\varsigma _1(t_k))=1-\overline{\mu }_{\tilde{N}_1^1}(\varsigma _1(t_k))\).
Choose \(h_s=0.001\)s; \(\epsilon _1=\epsilon _2=\epsilon _3\left( \zeta (t)\right) =\epsilon _4\left( \zeta (t)\right) =\epsilon _5\left( \zeta (t)\right) =\epsilon _6\left( \zeta (t)\right) =\epsilon _7\left( \zeta (t)\right) =\epsilon _8\left( \zeta (t)\right) =0.0001\); \(\varkappa _{1}=1\), \(\varkappa _{2}=0.1\) and \(\varkappa _{3}=1\); \({\textbf {T}}=\left[ {\begin{array}{*{20}{c}} 1 &{} 0\\ 0 &{} 0 \end{array}} \right] \); the degrees of \( \grave{\underline{{\textbf {H}}}}_{ijl}\left( \zeta (t)\right) \), \(\grave{\overline{{\textbf {H}}}}_{ijl}\left( \zeta (t)\right) \) and \(\grave{{\textbf {Y}}}_l\left( \zeta (t)\right) \) are all 0.
In this example, the three cases are employed to study how \(\hat{L}\) influences the stability regions for \(0 \le a \le 90\), \(0 \le b \le 5\) (the spacing of a is 10 and the spacing of b is 1). The detailed information of the three cases can be found in Table 1. Firstly, Theorem 2 is applied to acquire the solutions for the three cases for different a and b, but all solutions are infeasible. Then, Theorem 4 is applied to acquire the solutions. The stability regions for \(\hat{L}=1\), \(\hat{L}=3\) and \(\hat{L}=5\) with Theorem 4 can be found in Fig. 1. It is obvious that the region for \(\hat{L}=1\) where feasible solutions can be sought out is the smallest, while the region for \(\hat{L}=5\) where feasible solutions can be sought out is the broadest.

The stability regions for Case 1 \((\times )\), Case 2 \((\square )\) and Case 3 \((\bigcirc )\) with Theorem 4
To conduct simulations, the following settings are considered: \(\underline{\lambda }_1({\varsigma _1}(t))=\frac{\sin {(5{\varsigma _1}(t))}+1}{2}\) and \(\overline{\lambda }_1({\varsigma _1}(t))=1-\underline{\lambda }_1({\varsigma _1}(t))\), \(\underline{\lambda }_3({\varsigma _1}(t))=\frac{\cos {(5{\varsigma _1}(t))}+1}{2}\) and \(\overline{\lambda }_3({\varsigma _1}(t))=1-\underline{\lambda }_3({\varsigma _1}(t))\), the explicit definitions of \(\underline{\lambda }_2({\varsigma _1}(t))\) and \(\overline{\lambda }_2({\varsigma _1}(t))\) are no need to be given because \(\tilde{w}_1({\varsigma _1}(t))=\underline{\lambda }_1({\varsigma _1}(t))\underline{w}_1({\varsigma _1}(t))+\overline{\lambda }_1({\varsigma _1}(t))\) \(\overline{w}_1({\varsigma _1}(t))\), \(\tilde{w}_3({\varsigma _1}(t))=\underline{\lambda }_3({\varsigma _1}(t))\underline{w}_3({\varsigma _1}(t))+\overline{\lambda }_3({\varsigma _1}(t))\) \(\overline{w}_3({\varsigma _1}(t))\) as well as \(\tilde{w}_2({\varsigma _1}(t))=1-\tilde{w}_1({\varsigma _1}(t))-\tilde{w}_3({\varsigma _1}(t))\); \(\underline{\kappa }_j(\varsigma _1(t_k))\) and \(\overline{\kappa }_j(\varsigma _1(t_k))\) are both 0.5, for \(j=1\), 2.

Phase plots of \({\varsigma _1}(t)\) and \({\varsigma _2}(t)\) with Theorem 4. (Red curves: phase flows. Black circles: initial states. The black dot: the origin). (Color figure online)

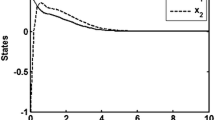
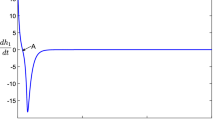
Time responses for Case 1 for \(a = 0\) and \(b = 0\) with Theorem 4

Time responses for Case 2 for \(a = 30\) and \(b = 3\) with Theorem 4

Time responses for Case 3 for \(a = 90\) and \(b = 5\) with Theorem 4
Some stable points in Fig. 1 are chosen for further verification. For Case 1, \(a = 0\) and \(b = 0\) are chosen; through Theorem 4, we can obtain feedback gain matrices shown in Table 2. For Case 2, \(a = 30\) and \(b = 3\) are chosen; through Theorem 4, we can obtain feedback gain matrices shown in Table 3. For Case 3, \(a = 90\) and \(b = 5\) are chosen; through Theorem 4, we can obtain feedback gain matrices shown in Table 4. The phase plots of \({\varsigma _1}(t)\) and \({\varsigma _2}(t)\) for the three cases for specific a and b with Theorem 4 are shown in Fig. 2. As seen from Fig. 2, the curves for the three cases for specific a and b originating from 4 different initial states which are \(\left[ {\begin{array}{*{20}{c}} 10&10 \end{array}}\right] ^T\), \(\left[ {\begin{array}{*{20}{c}} -5&6 \end{array}}\right] ^T\), \(\left[ {\begin{array}{*{20}{c}} -8&-4 \end{array}}\right] ^T\) and \(\left[ {\begin{array}{*{20}{c}} 9&-7 \end{array}}\right] ^T\), all approach the origin. In addition, the time responses for the three cases for specific a and b with Theorem 4 are provided, where the initial states are \(\left[ {\begin{array}{*{20}{c}} 5.5&0 \end{array}}\right] ^T\). It can be found that the sampling intervals in Fig. 3b are the same, which is because there is only one domain for Case 1. Then, from Figs. 4b and 5b, the variation in sampling intervals can be intuitively viewed. Note that the sampling intervals between 0 and 0.02s are given in figures because the switching for Case 2 for \(a = 30\) and \(b = 3\), and the switching for Case 3 for \(a = 90\) and \(b = 5\), both happen in 0.02s.
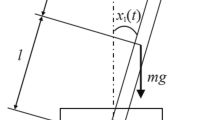
As seen from the simulation outcomes, the proposed method can be used to realize the control of the uncertain nonlinear plant depicted by the IT2 polynomial fuzzy model. It is well known that the most practical examples, such as the inverted pendulum [17], can be considered to be uncertain nonlinear plants, so the proposed method can be widely applied to practical examples, and achieve relaxed results.
5 Conclusion
The stability of an IT2SDPFMB control system with a switching control scheme has been studied. A switching IT2SD polynomial fuzzy controller consisting of several local IT2SD polynomial fuzzy controllers has been synthesized for control. For the support of the stability analysis, a looped-functional-based technique has been adopted. For solving the mismatch dilemma and improving design flexibility, the IPM concept has been leveraged. The state information, the information of IT2 MFs, as well as the switching control scheme, have been considered, resulting in relaxed stability conditions. The simulation outcomes have confirmed the efficacy of the proposed method.
In the future, the optimization of MFs will be considered based on the proposed method for the improvement of control performance.
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Xiao, B., Lam, H.K., Zhou, H., Gao, J.: Analysis and design of interval type-2 polynomial-fuzzy-model-based networked tracking control systems. IEEE Transact. Fuzzy Syst. 29(9), 2750–2759 (2021)
Tanaka, K., Wang, H.O.: Fuzzy control systems design and analysis: a linear matrix inequality approach. Wiley, New York (2001)
Wang, H.O., Tanaka, K., Griffin, M.F.: An approach to fuzzy control of nonlinear systems: stability and design issues. IEEE Transact. Fuzzy Syst. 4(1), 14–23 (1996)
Tanaka, K., Ikeda, T., Wang, H.O.: Fuzzy regulators and fuzzy observers: relaxed stability conditions and LMI-based designs. IEEE Transact. Fuzzy Syst. 6(2), 250–265 (1998)
Tanaka, K., Yoshida, H., Ohtake, H., Wang, H.O.: A sum-of-squares approach to modeling and control of nonlinear dynamical systems with polynomial fuzzy systems. IEEE Transact. Fuzzy Syst. 17(4), 911–922 (2009)
Tanaka, K., Ohtake, H., Wang, H.O.: Guaranteed cost control of polynomial fuzzy systems via a sum of squares approach. IEEE Transact. Syst. Man Cybern. Part B (Cybern.) 39(2), 561–567 (2009)
Xiao, B., Lam, H.K., Zhong, Z., Wen, S.: Membership-function-dependent stabilization of event-triggered interval type-2 polynomial fuzzy-model-based networked control systems. IEEE Transact. Fuzzy Syst. 28(12), 3171–3180 (2020)
Mendel, J.M.: Type-2 fuzzy sets and systems: an overview. IEEE Comput. Intell. Mag. 2(1), 20–29 (2007)
Mendel, J.M., John, R.I., Liu, F.: Interval type-2 fuzzy logic systems made simple. IEEE Transact. Fuzzy Syst. 14(6), 808–821 (2006)
Lam, H.K., Seneviratne, L.D.: Stability analysis of interval type-2 fuzzy-model-based control systems. IEEE Transact. Syst. Man Cybern. Part B (Cybern.) 38(3), 617–628 (2008)
Xiao, B., Lam, H.K., Li, H.: Stabilization of interval type-2 polynomial-fuzzy-model-based control systems. IEEE Transact. Fuzzy Syst. 25(1), 205–217 (2017)
Lam, H.K., Li, H., Deters, C., Secco, E.L., Wurdemann, H.A., Althoefer, K.: Control design for interval type-2 fuzzy systems under imperfect premise matching. IEEE Transact. Ind. Electron. 61(2), 956–968 (2014)
Lam, H.K., Leung, F.H.: Stability analysis of fuzzy control systems subject to uncertain grades of membership. IEEE Transact. Syst. Man Cybern Part B (Cybern.) 35(6), 1322–1325 (2005)
Lam, H.K., Narimani, M.: Stability analysis and performance design for fuzzy-model-based control system under imperfect premise matching. IEEE Transact. Fuzzy Syst. 17(4), 949–961 (2009)
Zhou, H., Lam, H.K., Xiao, B., Zhong, Z.: Dissipativity-based filtering of time-varying delay interval type-2 polynomial fuzzy systems under imperfect premise matching. IEEE Transact. Fuzzy Syst. 30(4), 908–917 (2022)
Chen, M., Lam, H.K., Xiao, B., Xuan, C.: Membership-function-dependent control design and stability analysis of interval type-2 sampled-data fuzzy-model-based control system. IEEE Transact. Fuzzy Syst. 30(6), 1614–1623 (2022)
Chen, M., Lam, H.K., Xiao, B., Zhou, H.: Membership-function-dependent control design of interval type-2 sampled-data fuzzy-model-based output-feedback tracking control system. IEEE Transact. Fuzzy Syst. 30(9), 3823–3832 (2022)
Luo, J., Li, M., Liu, X., Tian, W., Zhong, S., Shi, K.: Stabilization analysis for fuzzy systems with a switched sampled-data control. J. Frankl. Inst. 357(1), 39–58 (2020)
Lam, H.K., Narimani, M., Li, H., Liu, H.: Stability analysis of polynomial-fuzzy-model-based control systems using switching polynomial Lyapunov function. IEEE Transact. Fuzzy Syst. 21(5), 800–813 (2013)
Shanmugam, L., Joo, Y.H.: Stabilization of permanent magnet synchronous generator-based wind turbine system via fuzzy-based sampled-data control approach. Inf. Sci. 559, 270–285 (2021)
Wu, T., Xiong, L., Cao, J., Park, J.H.: Hidden Markov model-based asynchronous quantized sampled-data control for fuzzy nonlinear Markov jump systems. Fuzzy Sets Syst. 432, 89–110 (2022)
Li, S., Ahn, C.K., Chadli, M., Xiang, Z.: Sampled-data adaptive fuzzy control of switched large-scale nonlinear delay systems. IEEE Transact. Fuzzy Syst. 30(4), 1014–1024 (2022)
Xiao, B., Lam, H.K., Yu, Y., Li, Y.: Sampled-data output-feedback tracking control for interval type-2 polynomial fuzzy systems. IEEE Transact. Fuzzy Syst. 28(3), 424–433 (2020)
Seuret, A.: A novel stability analysis of linear systems under asynchronous samplings. Automatica 48(1), 177–182 (2012)
Briat, C., Seuret, A.: A looped-functional approach for robust stability analysis of linear impulsive systems. Syst. & Control Lett. 61(10), 980–988 (2012)
Seuret, A., Briat, C.: Stability analysis of uncertain sampled-data systems with incremental delay using looped-functionals. Automatica 55, 274–278 (2015)
Fridman, E., Seuret, A., Richard, J.P.: Robust sampled-data stabilization of linear systems: an input delay approach. Automatica 40(8), 1441–1446 (2004)
Jiang, X.: On sampled-data fuzzy control design approach for T-S model-based fuzzy systems by using discretization approach. Inf. Sci. 296, 307–314 (2015)
Chen, G., Du, G., Xia, J., Xie, X., Park, J.H.: Controller synthesis of aperiodic sampled-data networked control system with application to interleaved flyback module integrated converter. IEEE Transact. Circuits Syst. I: Regul. Pap. 70(11), 4570–4580 (2023)
Chen, G., Xia, J., Park, J.H., Shen, H., Zhuang, G.: Sampled-data synchronization of stochastic Markovian jump neural networks with time-varying delay. IEEE Transact. Neural Netw. Learn. Syst. 33(8), 3829–3841 (2022)
Chen, G., Fan, C., Sun, J., Xia, J.: Mean square exponential stability analysis for Itô stochastic systems with aperiodic sampling and multiple time-delays. IEEE Transact. Autom. Control 67(5), 2473–2480 (2022)
Zhu, X., Wang, Y.: Stabilization for sampled-data neural-network-based control systems. IEEE Transact. Syst. Man Cybern. Part B (Cybern.) 41(1), 210–221 (2011)
Song, G.: Stability analysis of interval type-2 polynomial fuzzy-model-based control systems. Ph.D. thesis, King’s College London (2020)
Park, P., Wan Ko, J.: Stability and robust stability for systems with a time-varying delay. Automatica 43(10), 1855–1858 (2007)
Ge, C., Wang, H., Liu, Y., Park, J.H.: Further results on stabilization of neural-network-based systems using sampled-data control. Nonlinear Dyn. 90(3), 2209–2219 (2017)
Boyd, S., El Ghaoui, L., Feron, E., Balakrishnan, V.: Linear matrix inequalities in system and control theory. SIAM, Philadelphia, PA (1994)
Acknowledgements
King’s College London, King’s Computational Research, Engineering and Technology Environment (CREATE) and China Scholarship Council provided partial support for this work.
Funding
There is no funding information.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no Conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Proof of Theorem 1
The functional below is employed:
where \({\textbf {P}}>0\) and \({\textbf {M}}>0\).
Take the derivative of \({V}_i(t)\), \(i=1\), \(\dots \), 4, we have
From (50) and Lemma 1, the following is obtained:
where \(\varLambda _{4,2}={\textbf {Q}}{} {\textbf {M}}^{-1}{} {\textbf {Q}}^T\).
From (13), we get
where \(\mathfrak {F}=\varkappa _1{\textbf {E}}_1^T\tilde{{\textbf {X}}}^T+\varkappa _2{\textbf {E}}_2^T\tilde{{\textbf {X}}}^T+\varkappa _3{\textbf {E}}_3^T\tilde{{\textbf {X}}}^T\).
Using (47)–(49), (51), and (52), it follows that for \(t \in [t_k,\text { }t_{k+1})\),
By the convex combination technique [32, 34, 35], \(\dot{V}(t)<0\) will be obtained if
Based on (54), we have
It is apparent that (54) will be valid if
Based on (55), we have
With the Schur complement [36], (55) will be valid if (57) holds and
If (16) holds with \(\epsilon _3\left( \zeta (t)\right) >0\), (17) holds with \(\epsilon _4\left( \zeta (t)\right) >0\) and (18) holds with \(\epsilon _5\left( \zeta (t)\right) >0\), then (57), (58) and (60) will be valid, which reveals that (10) is asymptotically stable.
The proof is completed. \(\square \)
Appendix B
Proof of Theorem 2
Define
In addition, define \(\grave{{\textbf {P}}} =\mathbb {X}_1^{T}{} {\textbf {P}}\mathbb {X}_1 \), \(\grave{{\textbf {S}}} =\mathbb {X}_1^{T}{} {\textbf {S}}\mathbb {X}_1 \), \(\grave{{\textbf {R}}}_1 =\mathbb {X}_1^{T}{} {\textbf {R}}_1\mathbb {X}_1 \), \(\grave{{\textbf {R}}}_2 =\mathbb {X}_1^{T}{} {\textbf {R}}_2\mathbb {X}_1 \), \(\grave{{\textbf {M}}} =\mathbb {X}_1^{T}{} {\textbf {M}}\mathbb {X}_1 \), \(\grave{{\textbf {Q}}} =\mathbb {X}_3^{T}{} {\textbf {Q}}\mathbb {X}_1 \), \(\tilde{{\textbf {X}}}={\textbf {X}}^{-1}\) and \(\grave{\mathfrak {F}}=\varkappa _1{\textbf {E}}_1^T+\varkappa _2{\textbf {E}}_2^T+\varkappa _3{\textbf {E}}_3^T\).
(57) is pre-multiplied and post-multiplied through \(\mathbb {X}_3^{T}\), \(\mathbb {X}_3\), we have
(58) is pre-multiplied and post-multiplied through \(\mathbb {X}_3^{T}\), \(\mathbb {X}_3\), we have
(60) is pre-multiplied and post-multiplied through \(\mathbb {X}_4^{T}\), \(\mathbb {X}_4\), we have
If (21) holds with \(\epsilon _3\left( \zeta (t)\right) >0\), (22) holds with \(\epsilon _4\left( \zeta (t)\right) >0\) and (23) holds with \(\epsilon _5\left( \zeta (t)\right) >0\), then (65), (66) and (67) will be valid.
The proof is completed.
\(\square \)
Appendix C
Proof of Theorem 3
For relaxation, the information of IT2 MFs is utilized. Define
in which \(\underline{w}_{il}\), \(\underline{m}_{jl}\) are lower bounds of \(\tilde{w}_i\left( \zeta (t)\right) \) as well as \(\tilde{m}_j\left( \zeta (t_k)\right) \), respectively, for \(\zeta (t)\in \varUpsilon _l\); \(\overline{w}_{il}\), \(\overline{m}_{jl}\) are upper bounds of \(\tilde{w}_i\left( \zeta (t)\right) \) as well as \(\tilde{m}_j\left( \zeta (t_k)\right) \), respectively, for \(\zeta (t)\in \varUpsilon _l\). \(\underline{\delta }_{ijl}\) and \(\overline{\delta }_{ijl}\) need to satisfy
Via slack polynomial matrices \( \underline{{\textbf {H}}}_{ijl}\left( \zeta (t)\right) \ge 0\), \( \overline{{\textbf {H}}}_{ijl}\left( \zeta (t)\right) \) \(\ge 0\), inequalities (70) and (71), we have
Furthermore, the state information is taken into account for further relaxation. Through \(\underline{\zeta }_l\), \(\overline{\zeta }_l\) which are lower as well as upper bounds of \(\zeta (t)\), respectively, for \(\zeta (t)\in \varUpsilon _l\), we have
where \({\textbf {T}}=\left[ {\begin{array}{*{20}{c}} T_{1} &{} 0 &{} \cdots &{} 0 \\ 0 &{} T_{2} &{} \cdots &{} 0 \\ \vdots &{} \vdots &{} \ddots &{} \vdots \\ 0 &{} 0 &{} \cdots &{} T_{n} \end{array}} \right] \), \(T_{i}\) is either zero or one; if \(T_{i}\) is one, then the information of \(\varsigma _i(t)\) will be considered, otherwise not; \(i=1,\text { }\dots ,\text { }n\).
Via the slack matrix \( {\textbf {Y}}_l\left( \zeta (t)\right) \ge 0\) and (74), we have
Recalling (53) and combining (72), (73), (75), it follows that for \(t \in [t_k,\text { }t_{k+1})\),
By the convex combination technique [32, 34, 35], \(\dot{V}(t)<0\) will be obtained if
Based on (77), we have
It is apparent that (77) will be valid if
Based on (78), we have
With the Schur complement [36], (78) will be valid if (80) holds and
If (30) holds with \(\epsilon _6\left( \zeta (t)\right) >0\), (31) holds with \(\epsilon _7\left( \zeta (t)\right) >0\) and (32) holds with \(\epsilon _8\left( \zeta (t)\right) >0\), then (80), (81) and (83) will be valid, which reveals that (10) is asymptotically stable.
The proof is completed. \(\square \)
Appendix D
Proof of Theorem 4
Define \(\grave{\underline{{\textbf {H}}}}_{ijl}\left( \zeta (t)\right) =\mathbb {X}_3^{T}\underline{{\textbf {H}}}_{ijl}\left( \zeta (t)\right) \mathbb {X}_3\), \(\grave{\overline{{\textbf {H}}}}_{ijl}\left( \zeta (t)\right) =\mathbb {X}_3^{T}\overline{{\textbf {H}}}_{ijl}\left( \zeta (t)\right) \mathbb {X}_3\), \(\grave{{\textbf {Y}}}_l\left( \zeta (t)\right) \) \(=\mathbb {X}_3^{T}{} {\textbf {Y}}_l\left( \zeta (t)\right) \mathbb {X}_3\), and the other matrices have been defined in the proof of Theorem 2.
(80) is pre-multiplied and post-multiplied through \(\mathbb {X}_3^{T}\), \(\mathbb {X}_3\), we have
(81) is pre-multiplied and post-multiplied through \(\mathbb {X}_3^{T}\), \(\mathbb {X}_3\), we have
(83) is pre-multiplied and post-multiplied through \(\mathbb {X}_4^{T}\), \(\mathbb {X}_4\), we have
If (38) holds with \(\epsilon _6\left( \zeta (t)\right) >0\), (39) holds with \(\epsilon _7\left( \zeta (t)\right) >0\) and (40) holds with \(\epsilon _8\left( \zeta (t)\right) >0\), then (84), (85) and (86) will be valid.
The proof is completed. \(\square \)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Chen, M., Lam, HK., Xiao, B. et al. Stability analysis of interval type-2 sampled-data polynomial fuzzy-model-based control system with a switching control scheme. Nonlinear Dyn 112, 11111–11126 (2024). https://doi.org/10.1007/s11071-024-09606-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09606-8