
Abstract
In this work, Sanders–Koiter’s nonlinear shell theory is applied to study the nonlinear moderate-amplitude vibrations of doubly curved shells using two different approximations of the strain–displacement relations for shallow and non-shallow shells. The nonlinear equations of motion are determined by Lagrange equations. The displacement fields are approximated using an expansion of trigonometric functions that satisfy geometric (essential) and nonlinear natural boundary conditions. Therefore, the backbone curves are determined using multiple shooting method and an Euler–Newtonian predictor–corrector continuation algorithm; the Floquet theory is applied to determine the stability of the periodic solutions. The obtained backbone curves show multiple internal resonances due to the coupling between normal modes. The mode influence of some selected points on the backbone curves is depicted to analyze the internal resonances, which can represent loss of stability and sudden changes in the dynamic behavior of shells undergoing moderate-amplitude vibrations. Saddle–node, Newmark–Sacker and period-doubling bifurcations are observed.







Similar content being viewed by others


Data availability
Data will be made available on request.
References
Leissa, A.W.: Vibration of Shells. NASA SP, vol. 288. Scientific and Technical Information Office, National Aeronautics and Space Administration, Washington, D. C. (1973)
Amabili, M., Pellicano, F., Païdoussis, M.P.: Nonlinear vibrations of simply supported, circular cylindrical shells, coupled to quiescent fluid. J. Fluids Struct. 12(7), 883–918 (1998). https://doi.org/10.1006/jfls.1998.0173
Amabili, M., Païdoussis, M.P.: Review of studies on geometrically nonlinear vibrations and dynamics of circular cylindrical shells and panels, with and without fluid-structure interaction. Appl. Mech. Rev. 56(4), 349–356 (2003). https://doi.org/10.1115/1.1565084
Alijani, F., Amabili, M.: Non-linear vibrations of shells: a literature review from 2003 to 2013. Int. J. Non-Linear Mech. 58, 233–257 (2014). https://doi.org/10.1016/j.ijnonlinmec.2013.09.012
Kerschen, G., Peeters, M., Golinval, J.C., Vakakis, A.F.: Nonlinear normal modes, part I: a useful framework for the structural dynamicist. Mech. Syst. Signal Process. 23(1), 170–194 (2009). https://doi.org/10.1016/j.ymssp.2008.04.002
Sofiyev, A.H.: Nonlinear free vibration of shear deformable orthotropic functionally graded cylindrical shells. Compos. Struct. 142, 35–44 (2016). https://doi.org/10.1016/j.compstruct.2016.01.066
Hasrati, E., Ansari, R., Rouhi, H.: Nonlinear free vibration analysis of shell-type structures by the variational differential quadrature method in the context of six-parameter shell theory. Int. J. Mech. Sci. 151, 33–45 (2019). https://doi.org/10.1016/j.ijmecsci.2018.10.053
Panda, S.K., Singh, B.N.: Nonlinear free vibration of spherical shell panel using higher order shear deformation theory—a finite element approach. Int. J. Press. Vessels Pip. 86(6), 373–383 (2009). https://doi.org/10.1016/j.ijpvp.2008.11.023
Sofiyev, A.H., Turan, F.: On the nonlinear vibration of heterogenous orthotropic shallow shells in the framework of the shear deformation shell theory. Thin-Walled Struct. 161, 107181 (2021). https://doi.org/10.1016/j.tws.2020.107181
Awrejcewicz, J., Kurpa, L., Shmatko, T.: Linear and nonlinear free vibration analysis of laminated functionally graded shallow shells with complex plan form and different boundary conditions. Int. J. Non-Linear Mech. 107, 161–169 (2018). https://doi.org/10.1016/j.ijnonlinmec.2018.08.013
Zhao, W., Zhang, J., Zhang, W., Yuan, X.: Internal resonance characteristics of hyperelastic thin-walled cylindrical shells composed of mooney-rivlin materials. Thin-Walled Struct. 163, 107754 (2021). https://doi.org/10.1016/j.tws.2021.107754
Amabili, M., Balasubramanian, P.: Nonlinear vibrations of truncated conical shells considering multiple internal resonances. Nonlinear Dyn. 100(1), 77–93 (2020). https://doi.org/10.1007/s11071-020-05507-8
Sun, M., Quan, T., Wang, D.: Nonlinear oscillations of rectangular plate with 1:3 internal resonance between different modes. Results Phys. 11, 495–500 (2018). https://doi.org/10.1016/j.rinp.2018.09.031
Breslavsky, I.D., Amabili, M.: Nonlinear vibrations of a circular cylindrical shell with multiple internal resonances under multi-harmonic excitation. Nonlinear Dyn. 93, 53–62 (2018). https://doi.org/10.1007/s11071-017-3983-2
Rodrigues, L., Silva, F.M.A., Gonçalves, P.B.: Influence of initial geometric imperfections on the 1:1:1:1 internal resonances and nonlinear vibrations of thin-walled cylindrical shells. Thin-Walled Struct. 151, 106730 (2020). https://doi.org/10.1016/j.tws.2020.106730
Rodrigues, L., Silva, F.M.A., Gonçalves, P.B.: Effect of geometric imperfections and circumferential symmetry on the internal resonances of cylindrical shells. Int. J. Non-Linear Mech. 139, 103875 (2022). https://doi.org/10.1016/j.ijnonlinmec.2021.103875
Alijani, F., Amabili, M.: Chaotic vibrations in functionally graded doubly curved shells with internal resonance. Int. J. Struct. Stab. Dyn. 12(06), 1250047 (2012). https://doi.org/10.1142/S0219455412500472
Amabili, M., Pellicano, F., Vakakis, A.F.: Nonlinear vibrations and multiple resonances of fluid-filled, circular shells, part 1: equations of motion and numerical results. J. Vib. Acoust. 122(4), 346–354 (2000). https://doi.org/10.1115/1.1288593
Pellicano, F., Amabili, M., Vakakis, A.F.: Nonlinear vibrations and multiple resonances of fluid-filled, circular shells, part 2: perturbation analysis. J. Vib. Acoust. 122(4), 355–364 (2000)
Amabili, M.: Theory and experiments for large-amplitude vibrations of empty and fluid-filled circular cylindrical shells with imperfections. J. Sound Vib. 262(4), 921–975 (2003). https://doi.org/10.1016/S0022-460X(02)01051-9
Amabili, M.: A comparison of shell theories for large-amplitude vibrations of circular cylindrical shells: Lagrangian approac. J. Sound Vib. 264(5), 1091–1125 (2003). https://doi.org/10.1016/S0022-460X(02)01385-8
Kurpa, L., Pilgun, G., Amabili, M.: Nonlinear vibrations of shallow shells with complex boundary: R-functions method and experiments. J. Sound Vib. 306(3), 580–600 (2007). https://doi.org/10.1016/j.jsv.2007.05.045
Pellicano, F.: Vibrations of circular cylindrical shells: theory and experiments. J. Sound Vib. 303(1–2), 154–170 (2007). https://doi.org/10.1016/j.jsv.2007.01.022
Hemmatnezhad, M., Rahimi, G.H., Tajik, M., Pellicano, F.: Experimental, numerical and analytical investigation of free vibrational behavior of GFRP-stiffened composite cylindrical shells. Compos. Struct. 120, 509–518 (2015). https://doi.org/10.1016/j.compstruct.2014.10.011
Biswal, M., Sahu, S.K., Asha, A.V.: Experimental and numerical studies on free vibration of laminated composite shallow shells in hygrothermal environment. Compos. Struct. 127, 165–174 (2015). https://doi.org/10.1016/j.compstruct.2015.03.007
Zippo, A., Barbieri, M., Iarriccio, G., Pellicano, F.: Nonlinear vibrations of circular cylindrical shells with thermal effects: an experimental study. Nonlinear Dyn. 99, 373–391 (2020). https://doi.org/10.1007/s11071-018-04753-1
Thomas, O., Touzé, C., Chaigne, A.: Non-linear vibrations of free-edge thin spherical shells: modal interaction rules and 1:1:2 internal resonance. Int. J. Solids Struct. 42(11), 3339–3373 (2005). https://doi.org/10.1016/j.ijsolstr.2004.10.028
Thomas, O., Touzé, C., Luminais, É.: Non-linear vibrations of free-edge thin spherical shells: experiments on a 1:1:2 internal resonance. Nonlinear Dyn. 49, 259–284 (2007). https://doi.org/10.1007/s11071-006-9132-y
Pinho, F.A.X.C., Del Prado, Z.J.G.N., Silva, F.M.A.: On the free vibration problem of thin shallow and non-shallow shells using tensor formulation. Eng. Struct. 244, 112807 (2021). https://doi.org/10.1016/j.engstruct.2021.112807
Koiter, W.T.: A consistent first approximation in the general theory of thin eleastoc shells: Part 1, foundations and linear theory. In: Proceedings IUTAM Symposium on the Theory of Thin Elastic Shells (1959)
Ciarlet, P.G.: An Introduction to Differential Geometry with Applications to Elasticity, pp. 1–209. Springer, Dordrecht (2005)
Bower, A.F.: Applied Mechanics of Solids, 1st edn., pp. 1–795. CRC Press, Boca Raton (2009)
Yamaki, N., Simitses, G.J.: Elastic stability of circular cylindrical shells. J. Appl. Mech. 52(2), 501–502 (1985). https://doi.org/10.1115/1.3169089
Amabili, M.: Non-linear vibrations of doubly curved shallow shells. Int. J. Non-Linear Mech. 40(5), 683–710 (2005). https://doi.org/10.1016/j.ijnonlinmec.2004.08.007
Pinho, F.A.X.C., Del Prado, Z.J.G.N., Silva, F.M.A.: Nonlinear static analysis of thin shallow and non-shallow shells using tensor formulation. Eng. Struct. 253, 113674 (2022). https://doi.org/10.1016/j.engstruct.2021.113674
Vorovich, I.I.: Nonlinear Theory of Shallow Shells. Springer, New York (1999)
Nayfeh, A.H., Balachandran, B.: Applied Nonlinear Dynamics: Analytical, Computational, and Experimental Methods. Wiley, Weinheim (2008)
Allgower, E.L., Georg, K.: Numerical Continuation Methods: an Introduction. Springer, Berlin (2012)
Guillot, L., Lazarus, A., Thomas, O., Vergez, C., Cochelin, B.: A purely frequency based floquet-hill formulation for the efficient stability computation of periodic solutions of ordinary differential systems. J. Comput. Phys. 416, 109477 (2020). https://doi.org/10.1016/j.jcp.2020.109477
Kerschen, G.: Definition and Fundamental Properties of Nonlinear Normal Modes, pp. 1–46. Springer, Vienna (2014)
King, M.E., Vakakis, A.F.: An energy-based approach to computing resonant nonlinear normal modes. J. Appl. Mech. 63(3), 810–819 (1996). https://doi.org/10.1115/1.2823367
Smith, M.: ABAQUS/Standard User’s Manual, Version 6.9. Dassault Systèmes Simulia Corp, United States (2009)
Amabili, M.: Do we need to satisfy natural boundary conditions in energy approach to nonlinear vibrations of rectangular plates? Mech. Syst. Signal Process. 189, 110119 (2023). https://doi.org/10.1016/j.ymssp.2023.110119
Kobayashi, Y., Leissa, A.W.: Large amplitude free vibration of thick shallow shells supported by shear diaphragms. Int. J. Non-Linear Mech. 30, 57–66 (1995). https://doi.org/10.1016/0020-7462(94)00030-E
Funding
The authors would like to acknowledge the Science and Technology Center of the Federal University of Cariri and the financial support of the Brazilian research agencies CNPq [grant numbers 306600/2020-0, 309087/2020-1], FAPEG [grant number 201410267001828] and CAPES [grant number 88881.689948/2022-01]. Marco Amabili acknowledges support of the Natural Sciences and Engineering Research Council of Canada [grant number RGPIN-2018–06609].
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A Differential geometric relations of the shell’s mid-surface

Backbone curves of the parabolic conoid for the models with 48 dof  , 75 dof
, 75 dof  , 108 dof
, 108 dof  and 147 dof
and 147 dof  .
.  , Abaqus’ backbone curve. In a total energy versus normalized frequency, and, in b maximum amplitude of the generalized coordinate \(u_{3_{13}}\) versus normalized frequency are given. The dashed curves represent unstable solutions; meanwhile, the solid curves represent stable solutions. NS, Newmark–Sacker bifurcation. (Color figure online)
, Abaqus’ backbone curve. In a total energy versus normalized frequency, and, in b maximum amplitude of the generalized coordinate \(u_{3_{13}}\) versus normalized frequency are given. The dashed curves represent unstable solutions; meanwhile, the solid curves represent stable solutions. NS, Newmark–Sacker bifurcation. (Color figure online)
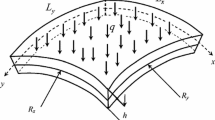
In this Appendix, the differential relations of the mid-surface are briefly presented; a detailed description of the tensor formulations can be found in the literature [31, 32]. The shell is oriented in Cartesian directions \(x^1\), \(x^2\) and \(x^3\) with unit vectors \({\textbf{e}}_1\), \({\textbf{e}}_2\) and \({\textbf{e}}_3\), and its mid-surface is parameterized by vectors \({\textbf{R}}\) and \({\textbf{r}}\), in reference and current configurations. Vectors \({\textbf{R}}\) and \({\textbf{r}}\) are function of curvilinear coordinates \(\xi ^1\) and \(\xi ^2\), respectively, and are given by:
where \(\xi ^1\) and \(\xi ^2\) are the curvilinear coordinates of the mid-surface, which can be interpreted as Cartesian coordinates taking values in some planar domain \(\Omega \), according to \(\left( \xi _1,\xi _2\right) \in \Omega \); functions X, Y and Z mathematically describe the mid-surface in reference configuration and \({\textbf{u}}\) is the field vector that describes the displacement of the shell’s mid-surface. Figure 9 displays the shells coordinates in reference and current configuration.
Vectors \({\textbf{X}}\) and \({\textbf{x}}\) describe the position of any point of the shell in both reference and current configurations. The kinematics of the shell follows the Kirchhoff–Love hypotheses, so vectors \({\textbf{X}}\) and \({\textbf{x}}\) are defined as:
where \(-h/2\le \xi ^3\le h/2\) is the coordinate that defines the position of a point of the shell perpendicular to the mid-surface. The triad of vectors \({\textbf{M}}_i\) (\(i=1,2,3\)) compose the covariant basis of the mid-surface in the reference configuration and are described in Eqs. (A3) as a function of vector \({\textbf{R}}\) and the curvilinear coordinates \(\xi ^1\) and \(\xi ^2\)
where vectors \({\textbf{M}}_1\) and \({\textbf{M}}_2\), defined in Eqs. (A3a) and (A3b), are tangent to the coordinate lines \(\xi ^\alpha \) (\(\alpha =1,2\)); \({\textbf{M}}_3\), defined in Eq. (A3c), is a unit vector perpendicular to the mid-surface of the shell; and \(\sqrt{G}=|{\textbf{M}}_1\times {\textbf{M}}_2|\). Notation \(Z_{,\alpha }\) represents the derivative of Z with respect to \(\xi ^\alpha \) where \(\alpha =1,2\).
The contravariant basis is composed by vectors \({\textbf{M}}^i\) (\(i=1,2,3\)) and can be determined by
where \(\delta _i^j\) is the Kronecker’s delta. It can be demonstrated by Eqs. (A3) and (A4) that \({\textbf{M}}^3={\textbf{M}}_3\) and both \({\textbf{M}}_i\) and \({\textbf{M}}^i\) bases are necessary in the analysis of shells when the orthogonal condition \({\textbf{M}}_1\cdot {\textbf{M}}_2=0\) is not satisfied.

Shell’s motion description
The metric tensor \({\textbf{G}}={\textbf{M}}_i\otimes {\textbf{M}}^i\) is used to measure the length of a curve along the surface, and its components in both covariant and contravariant bases are given by Eqs. (A5a) and (A5b), respectively, as:
An infinitesimal vector \(\textrm{d}{\textbf{R}}\) located on the mid-surface of the shell can be expressed in terms of the tangent vectors \({\textbf{M}}_\alpha \) and the infinitesimals \(\textrm{d}\xi ^\alpha \), according to:
The curvature tensor \({\textbf{K}}\) relates both the infinitesimal vectors \(\textrm{d}{\textbf{M}}_3\) and \(\textrm{d}{\textbf{R}}\), according to Eq. (A7a) and can be expanded in Eq. (A7b) as a function of vectors \({\textbf{M}}^\alpha \) (contravariant basis) and \({\textbf{M}}_\alpha \) (covariant basis) and the infinitesimals \(\textrm{d}\xi ^\beta \)
where \(K_{\alpha \beta }\) and \(K_\beta ^\alpha \) are, respectively, the covariant and mixed components of \({\textbf{K}}\) given by Eqs. (A8a) and (A8b).
The infinitesimal vectors \(\textrm{d}\mathbf {M_\alpha }\) and \(\textrm{d}\mathbf {M^\alpha }\) can also be written as a function of \(\mathbf {M_\beta }\) and \(\mathbf {M^\beta }\), according to Eqs. (A9a) and (A9b), such as:
where \(\Gamma _{\beta \gamma }^\alpha \) are the well-known Christoffel symbols determined by:
By combining Eqs. (A7), (A8), (A9) and (A10), the Gauss and Weingarten equations of the mid-surface can be obtained and are given by:
Any vector field acting on the mid-surface, e.g., the displacement vector \({\textbf{u}}\), can be decomposed in contravariant basis as \({\textbf{u}}=u_i{\textbf{M}}^i\). Therefore, its derivatives with respect to \(\xi ^\alpha \) are given by:
where the values of \(u_{i|\alpha }\) are the covariant derivatives of the displacement vector \({\textbf{u}}\), given by:
The second derivative of displacement vector \({\textbf{u}}\) is given by:
where \(u_{\sigma |\alpha \beta }\) and \(u_{3|\alpha \beta }\) are given by:
In this Appendix, the differential geometric properties of the mid-surface \({\mathcal {S}}\) in reference configuration were shown. Although the same properties (covariant and contravariant basis vector, metric and curvature tensors and Gauss–Weingarten equations) can also be obtained in the current configuration. Therefore, in the current configuration, vectors \({\textbf{m}}_i\) and \({\textbf{m}}^i\) are, respectively, the covariant and contravariant basis vectors and tensors \({\textbf{g}}\) and \(\varvec{\kappa }\) are, respectively, the metric and curvature tensors of the mid-surface \({\mathcal {s}}\).
Appendix B Numerical determination of periodic orbits
To the determination of the periodic orbits, the nonlinear system of second-order differential equations (9) is transformed into a first-order differential system consisting of \(2\times N\) equations:
where \(\omega \) represents the angular frequency of the periodic orbit; \(\tau \) is the dimensionless time variable scaled by \(T=(2\pi )/\omega \) to ensure a period of 1 for the orbits; \({\textbf{y}}'=\textrm{d}{\textbf{y}}/(\textrm{d}\tau )\) represents the derivative with respect to \(\tau \); and \({\textbf{y}}=[[{\textbf{U}}]^{\textsf{T}}, [{\textbf{U}}']^{\textsf{T}}]^{\textsf{T}}\) denotes the vector of state variables. The term \(\alpha {\textbf{M}}{\textbf{U}}'\) has been introduced to account for system damping, with the damping coefficient \(\alpha \) approaching zero as the continuation algorithm converges to a periodic orbit.
The integration interval is divided into \(N_t\) segments, i.e., \(0=\tau _0<\tau _1<\dots <\tau _{N_t}=1\). To find the values of the shooting points \({\textbf{y}}(\tau _k)\) for a given initial condition \({\textbf{y}}(\tau _{k-1})\), \(N_t\) systems of ordinary differential equations are solved, following the structure defined by the initial value problem:
where \(k = 1, \dots , N_t\), and the values of \({\textbf{y}}_k\) represent the initial conditions at the time points. In this work, we adopted \(N_t = 40\), and the ordinary differential equations (ODE) are solved in parallel using the \(\textsf{ode45}\) function in Matlab.
The goal of the multiple shooting method is to find the vector \({\textbf{Y}}=[[{\textbf{y}}_1]^{\textsf{T}},\dots , [{\textbf{y}}_{N_t}]^{\textsf{T}}]^{\textsf{T}}\)—that storages the initial conditions \({\textbf{y}}_{k}\)—the damping coefficient \(\alpha \) and the frequency \(\omega \) that represent a periodic orbit \({\textbf{y}}(\tau )\) such that \({\textbf{y}}(\tau )={\textbf{y}}(\tau +1)\). In other words, the objective of the continuation algorithm is to find the root of the residue equation (B18)
which means that all initial conditions \({\textbf{y}}_k\) and the correspondent shooting points \({\textbf{y}}(\tau _{k})\) lie in the same periodic orbit \({\textbf{y}}(\tau )\).
In this work, the phase constraint of Eq. (B19) was adopted [37].
where \([\ ]^0\) represents the previous iteration of the continuation method, such that \([{\textbf{Y}}]^0\) is a solution to Eq. (B18). From a geometric perspective, the phase constraint in equation (B19) aims to find a new periodic orbit \({\textbf{y}}(\tau )\) whose values of \([{\textbf{y}}_k]^0\) and \({\textbf{y}}_k\) lie in the same Poincaré section, which is perpendicular to the orbit \([{\textbf{y}}(\tau )]^0\) at \(\tau =\tau _{k-1}\). The expanded problem adding the phase constraint (B19) is given by:
where the vector \({\textbf{x}}=[{\textbf{Y}}^{\textsf{T}},\omega ,\alpha ]^{\textsf{T}}\) represents the variables of the continuation algorithm.
The continuation method begins by using a known solution \([{\textbf{x}}]^0\) to calculate an approximate solution \({\textbf{w}}\). This initial step is referred to as the predictor.
Here, the tangent vector \({\textbf{t}}={\textbf{t}}(\partial _{{\textbf{x}}}{\textbf{R}})\) is a function of the Jacobian of the residue at the previous iteration [38], and \(\delta \) represents the step size of the predictor. Throughout the continuation steps, various adaptation schemes can be applied to modify the value of \(\delta \) [38]. The solution \({\textbf{w}}\) is then improved through iterative correction steps until convergence is achieved using equation (B22)
The process continues for a new solution \({\textbf{x}}:={\textbf{w}}\), and subsequently applying the next fstep of the continuation algorithm.
Appendix C Modal shapes
In this appendix, the vibration modes and natural frequencies of the non-shallow spherical panel, the hyperbolic paraboloid, and the parabolic conoid are depicted in Figs.10, 11 and 12, respectively.

Modal shape functions of the non-shallow spherical panel

Modal shape functions of the hyperbolic paraboloid

Modal shape functions of the parabolic conoid
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Pinho, F.A.X.C., Amabili, M., Del Prado, Z.J.G.N. et al. Nonlinear free vibration analysis of doubly curved shells. Nonlinear Dyn 111, 21535–21555 (2023). https://doi.org/10.1007/s11071-023-08963-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08963-0