
Abstract
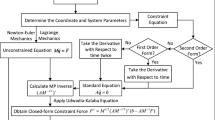
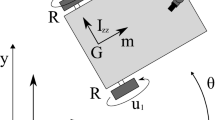
There are two categories of constraints for mechanical systems: equality and inequality. For the constrained mechanical systems with equality constraints, the Udwadia-Kalaba (U-K) equation can be used to model and introduce the constraint-following motion control method. In industrial automation and robotics, the problem of motion requirement with fixed boundary which is respond to an inequality constraint has not been solved systematically using constraint following method. Through transformation via a novel diffeomorphism, the equation of motion for a constrained mechanical system which addresses both equality and inequality constraints is presented. This can be considered a generalization of the Udwadia-Kalaba (U-K) equation. The advantages of the equation include that it does not require additional pseudo variables and the solution is analytical. This exhibits profound applications. As a demonstration, a pan/tilt device mounted under the firefighting unmanned aerial vehicles (UAVs) is manipulated. The water-jet nozzle need motion requirements of swaying horizontally and not overshooting limits in vertical. Simulation and experimental results are presented to validate the effectiveness of the proposed approach.










Similar content being viewed by others
Data availibility
The datasets supporting the conclusions of this paper are included within the paper.
References
Makris, S.: Cooperation Robots for Flexible Manufacturing. Springer Nature Switzerland, Gewerbestrasse (2021)
Peng, H., Wang, J., Wang, S., Shen, W., Shi, D., Liu, D.: Coordinated motion control for a wheel-leg robot with speed consensus strategy. IEEE-ASME Trans. Mech. 25(3), 1366–1376 (2020)
Zhu, Y., He, X., Liu, Q., Guo, W.: Semiclosed-loop motion control with robust weld bead tracking for a spiral seam weld beads grinding robot. Robot. Comput.-integrat. Manufac. (2022). https://doi.org/10.1016/j.rcim.2021.102254
Zhang, X., Zhu, W., Wu, X., Song, T., Xie, Y., Zhao, H.: Dynamics and control for in-space assembly robots with large translational and rotational maneuvers. Acta Astronaut. 174, 166–179 (2020)
Zhang, X., Tan, J., Yao, Y., Wu, J.: Adaptive practical fixed-time tracking control for uncertain non-strict-feedback systems with input delay and prescribed boundary constraints. Int. J. Adapt. Control Signal Process. 36(3), 653–669 (2022)
Papastavridis, J.G.: Analytical Mechanics. Oxford University Press, UK (2002)
Udwadia, F.E., Kalaba, R.E.: Analytical Dynamics: A New Approach. Cambridge University Press, Cambridge (1996)
Udwadia, F.E.: Optimal tracking control of nonlinear dynamical systems. Proceed. Royal Soc. A-Math. Phys. Eng. Sci. 464(2097), 2341–2363 (2008)
Yang, Z., Huang, J., Hu, Z., Yin, H., Zhong, Z.: Adaptive constraint-following control for uncertain nonlinear mechanical systems with measurement error. Int. J. Robust Nonlinear Control 31(10), 4823–4838 (2021)
Zhao, R., Li, M., Niu, Q., Chen, Y.H.: Udwadia-kalaba constraint-based tracking control for artificial swarm mechanical systems: dynamic approach. Nonlinear Dyn. 100(3), 2381–2399 (2020)
Yang, S., Han, J., Xia, L., Chen, Y.H.: Adaptive robust servo constraint tracking control for an underactuated quadrotor uav with mismatched uncertainties. ISA Trans. 106, 12–30 (2020)
Sun, Q., Yang, G., Wang, X., Chen, Y.H.: Designing robust control for mechanical systems: constraint following and multivariable optimization. IEEE Trans. Industr. Inf. 16(8), 5267–5275 (2020)
Dong, F., Jin, D., Zhao, X., Han, J.: Adaptive robust constraint following control for omnidirectional mobile robot: an indirect approach. IEEE Access 9, 8877–8887 (2021)
Chen, Y.H., Zhang, X.: Adaptive robust approximate constraint-following control for mechanical systems. J. Franklin Institute-Eng. Appl. Math. 347(1), 69–86 (2010)
Rosenberg, R.M.: Analytical Dynamics of Discrete Systems. Plenum Press, New York (1977)
Ashpazzadeh, E., Lakestani, M., Yildirim, A.: Biorthogonal multiwavelets on the interval for solving multidimensional fractional optimal control problems with inequality constraint. Optimal Control Appl. Methods 41(5), 1477–1494 (2020)
Liu, Y.J., Tong, S.: Barrier lyapunov functions for nussbaum gain adaptive control of full state constrained nonlinear systems. Automatica 76, 143–152 (2017)
Xu, X., Grizzle, J.W., Tabuada, P., Ames, A.D.: Correctness guarantees for the composition of lane keeping and adaptive cruise control. IEEE Trans. Autom. Sci. Eng. 15, 1216–1229 (2018)
Ames, A., Xu, X., Grizzle, J.W., Tabuada, P.: Control barrier function based quadratic programs for safety critical systems. IEEE Trans. Autom. Control 62, 3861–3876 (2017). https://doi.org/10.1109/TAC.2016.2638961
Safe and robust observer-controller synthesis using control barrier functions. IEEE Control Systems Letters 7, 127–132 (2022)
Li, C., Zhao, H., Sun, H., Chen, Y.H.: Robust bounded control for nonlinear uncertain systems with inequality constraints. Mech. Syst. Signal Process. 140, 106665 (2020)
Zhu, Z., Zhao, H., Sun, H.: Stackelberg-theoretic optimal robust control for constrained permanent magnet linear motor with inequality constraints. IEEE-ASME Trans. Mechatron. 27, 5439–5450 (2022)
Zhen, S., Zhang, M., Liu, X., Zhao, H., Chen, Y.H., Chen, X.: Robust bounded control design and experimental verification for permanent magnet linear motor with inequality constraints. IEEE ACCESS 10, 96886–96895 (2022)
Wang, Z., Yang, G., Wang, X., Sun, Q.: Adaptive-adaptive robust boundary control for uncertain mechanical systems with inequality constraints. Nolinear Dynam. 110, 449–466 (2022)
Zhang, B., Gavin, H.P.: Gauss’s principle with inequality constraints for multiagent navigation and control. IEEE Trans. Autom. Control 67, 810–823 (2022)
Yin, H., Chen, Y.H., Yu, D.: Vehicle motion control under equality and inequality constraints: a diffeomorphism approach. Nonlinear Dyn. 95(1), 175–194 (2019)
Sun, H., Tu, L., Yang, L., Zhu, Z., Zhen, S., Chen, Y.H.: Adaptive robust control for nonlinear mechanical systems with inequality constraints and uncertainties. IEEE Trans. Syst. Man Cybernet.-Syst. (2022). https://doi.org/10.1109/TSMC.2022.3204901
Zhang, X., Song, B., Yang, Z., Huang, J., Jia, Y.: Optimal robust vehicle motion control under equality and inequality constraints. Asian J. Control (2022). https://doi.org/10.1002/asjc.2844
Yao, P., Wang, H., Ji, H.: Gaussian mixture model and receding horizon control for multiple uav search in complex environment. Nonlinear Dyn. 88(2), 903–919 (2017)
Yang, S., Xian, B.: Energy-based nonlinear adaptive control design for the quadrotor uav system with a suspended payload. IEEE Trans. Industr. Electron. 67(3), 2054–2064 (2020)
Hwang, C.L., Lai, J.Y., Lin, Z.S.: Sensor-fused fuzzy variable structure incremental control for partially known nonlinear dynamic systems and application to an outdoor quadrotor. IEEE-ASME Trans. Mechatron. 25(2), 716–727 (2020)
Sun, C., Huang, S., Chen, H., Ye, C., Wang, Y., Wang, W.J.: Laser-range-finder localization based fuzzy control for mobile robots. Eng. Comput. 34(7), 2409–2421 (2017)
Chiu, C., Wang, W.J.: Implementation of a ball inverted pendulum with omnidirectional moving ability using a robust fuzzy control strategy. ISA Trans. 86, 287–298 (2019)
Hwang, C.L., Lee, Y.: Tracking design of an omni-direction autonomous ground vehicle by hierarchical enhancement using fuzzy second-order variable structure control. J. Dynam. Syst. Measure. Control-Trans. ASME 140(9), 1–11 (2018)
Hwang, C.L., Yang, C., Hung, J.Y.: Path tracking of an autonomous ground vehicle with different payloads by hierarchical improved fuzzy dynamic sliding-mode control. IEEE Trans. Fuzzy Syst. 26(2), 899–914 (2018)
Kada, B., Ansari, U., Bajodah, A.H.: Highly maneuvering target interception via robust generalized dynamic inversion homing guidance and control. Aerosp. Sci. Technol. 99, 105749 (2020)
Mehedi, I.M., Ansari, U., Al-Saggaf, U.M., Bajodah, A.H.: Controlling a rotory servo cart system using robust generalized dynamic inversion. Int. J. Robot. Autom. 35(1), 77–85 (2020)
Zhang, D., Wang, Z., Masayoshi, T.: Neural-network-based iterative learning control for multiple tasks. IEEE Trans. Neural Netw. Learn. Syst. 32(9), 4178–4190 (2021)
Chai, R., Savvaris, A., Chai, S.: Integrated missile guidance and control using optimization-based predictive control. Nonlinear Dyn. 96(2), 997–1015 (2019)
Khalil, H.K.: Nonlinear Systems, third, edition Prentice-Hall, Upper Saddle River, USA (1996)
Baumgarte, J.: Stabilization of constraints and integrals of motion in dynamical systems. Comput. Methods Appl. Mech. Eng. 1(1), 1–16 (1972)
Acknowledgements
This work was supported in part by Shaanxi International Science and Technology Cooperation Project of China under Grant 2019 KW-015, Shaanxi Science & Technology Innovation Project of China under Grant 2016KTZDGY-02-03, and Fundamental Research Funds for Central Universities of China under Grant 300102259306.
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they do not have any conflicts of interest to this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhang, X., Zhao, R., Chen, YH. et al. A novel modeling and control approach considering equality and inequality constraints based on generalized Udwadia-Kalaba equation. Nonlinear Dyn 111, 17109–17122 (2023). https://doi.org/10.1007/s11071-023-08738-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08738-7