
Abstract
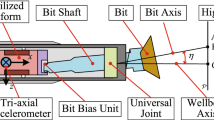
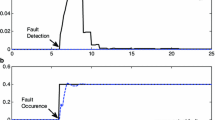
In this paper, the problem of active fault tolerant control (AFTC) is studied for polynomial nonlinear systems subject to asymmetric state constraints and measurement noise. The AFTC scheme is composed of the fault detection and isolation unit and the fault tolerant control unit. By using polynomial filters, the fault detection (FD) module and the fault isolation (FI) module are designed to obtain the accurate estimations of states and faults in the presence of measurement noise. The FD is realized by the residual evaluation approach, while the FI is achieved through the residual matching method. When a fault is detected and isolated, the controller switches from a nominal controller (NC) to a reconfigured controller (RC). To ensure that the asymmetric state constraint is not violated, a universal barrier Lyapunov function is introduced in the design of the NC and the RC. Moreover, the boundedness of tracking errors and estimation errors is analysed. Finally, the effectiveness of the proposed AFTC method is verified by a simulation for a dynamic point-the-bit rotary steerable drilling tool system.










Similar content being viewed by others

Data Availability Statement
The simulation data that support the findings of this study are available within the article.
References
Yang, H., Han, Q.L., Ge, X., Ding, L., Xu, Y., Jiang, B., Zhou, D.H.: Fault tolerant cooperative control of multi-agent systems: a survey of trends and methodologies. IEEE Trans. Ind. Inf. 16(1), 4–17 (2020)
Ju, Y., Tian, X., Liu, H., Ma, L.: Fault detection of networked dynamical systems: a survey of trends and techniques. Int. J. Syst. Sci. 52(16), 3390–3409 (2021)
Guo, B., Dian, S., Zhao, T.: Event-driven-observer-based fuzzy fault-tolerant control for nonlinear system with actuator fault. Nonlinear Dyn. 107(4), 3505–3519 (2022)
Zhang, Y., Jiang, J.: Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control. 32(2), 229–252 (2008)
Shen, Q., Yue, C., Goh, C.H., Wang, D.: Active fault-tolerant control system design for spacecraft attitude maneuvers with actuator saturation and faults. IEEE Trans. Ind. Electron. 66(5), 3763–3772 (2019)
Wu, D., Song, J., Shen, Y., Ji, Z.: Active fault-tolerant linear parameter varying control for the pitch actuator of wind turbines. Nonlinear Dyn. 87(1), 475–487 (2017)
Wang, X., Tan, C.P., Wang, Y., Zhang, Z.: Active fault tolerant control based on adaptive interval observer for uncertain systems with sensor faults. Int. J. Robust Nonlinear Control 31(8), 2857–2881 (2021)
Watanabe, A.T.Y., Leal, A.B., Cury, J.E.R., de Queiroz, M.H.: Combining online diagnosis and prognosis for safe controllability. IEEE Trans. Autom. Control 67(10), 5563–5569 (2022)
Zhang, X., Parisini, T., Polycarpou, M.M.: Adaptive fault-tolerant control of nonlinear uncertain systems: an information-based diagnostic approach. IEEE Trans. Autom. Control 49(8), 1259–1274 (2004)
Amin, A.A., Hasan, K.M.: A review of fault tolerant control systems: advancements and applications. Measurement 143, 58–68 (2019)
Sabbghian-Bidgoli, F., Farrokhi, M.: Polynomial fuzzy observer-based integrated fault estimation and fault-tolerant control with uncertainty and disturbance. IEEE Trans. Fuzzy Syst. 30(3), 741–754 (2022)
Roshanravan, S., Gendeshmin, B.S., Shamaghdari, S.: Design of an actuator fault-tolerant controller for an air vehicle with nonlinear dynamics. J. Aerosp. Eng. 233(10), 3534–3546 (2019)
Niu, Y., Sheng, L., Gao, M., Zhou, D.H.: Dynamic event-triggered state estimation for continuous-time polynomial nonlinear systems with external disturbances. IEEE Trans. Ind. Inf. 17(6), 3962–3970 (2021)
Meng, A., Lam, H.K., Wang, Z., Liu, F.: Static output feedback fault tolerant control and relaxed stability analysis of positive polynomial fuzzy systems. IEEE Trans. Fuzzy Syst. 30(9), 3928–3939 (2022)
Messaoudi, A., Gassara, H., Makni, S., El Hajjaji, A.: Design of polynomial observer-based fault-tolerant controller for polynomial systems with state delay: a sum of squares approach. Circuits Syst. Signal Process. 41(6), 3153–3171 (2022)
Mendoza, J.A.B., Vazquez, F.D.J.S., Valdivia, C.H.G., Sanchez, R.O., Garcia, M.M.: Observer design for sensor and actuator fault estimation applied to polynomial LPV systems: a riderless bicycle study case. Int. J. Syst. Sci. 49(14), 2996–3006 (2018)
Sabbghian-Bidgoli, F., Farrokhi, M.: Robust fuzzy observer-based fault-tolerant control: a homogeneous polynomial Lyapunov function approach. IET Control Theory Appl. (2022). https://doi.org/10.1049/cth2.12362
Sheng, L., Wang, Y., Gao, M., Niu, Y., Zhou, D.H.: Finite-time \(H_\infty \) filtering for nonlinear stochastic systems with multiplicative noises via Carleman linearization technique. IEEE Trans. Aerosp. Electron. Syst. 59(2), 1774–1786 (2023)
Geng, H., Wang, Z., Cheng, Y., Alsaadi, F.E., Dobaie, A.M.: State estimation under non-Gaussian Levy and time-correlated additive sensor noises: a modified Tobit Kalman filtering approach. Signal Process. 154, 120–128 (2019)
Mao, J., Sun, Y., Yi, X., Liu, H., Ding, D.: Recursive filtering of networked nonlinear systems: a survey. Int. J. Syst. Sci. 52(6), 1110–1128 (2021)
Jin, X.: Adaptive fixed-time control for MIMO nonlinear systems with asymmetric output constraints using universal barrier functions. IEEE Trans. Autom. Control 64(7), 3046–3053 (2019)
Tee, K.P., Ge, S.S., Tay, E.H.: Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 45, 918–927 (2009)
Zou, M., Yu, J., Ma, Y., Zhao, L., Lin, C.: Command filtering-based adaptive fuzzy control for permanent magnet synchronous motors with full-state constraints. Inf. Sci. 518, 1–12 (2020)
Zhang, J., Yang, J., Zhang, Z., Wu, Y.: Output feedback control of nonlinear cascaded systems with external disturbance and asymmetric constraints. Nonlinear Dyn. 108(4), 3727–3743 (2022)
Zhou, Z., Zhu, F., Xu, D., Guo, S., Zhao, Y.: Attack resilient control for vehicle platoon system with full states constraint under actuator faulty scenario. Appl. Math. Comput. 419, 126874 (2022)
Wu, L.B., Park, J.H., Zhao, N.N.: Robust adaptive fault-tolerant tracking control for nonaffine stochastic nonlinear systems with full-state constraints. IEEE Trans. Cybern. 50(8), 3793–3805 (2020)
Wang, X., Niu, B., Song, X., Zhao, P., Wang, Z.: Neural networks-based adaptive practical preassigned finite-time fault tolerant control for nonlinear time-varying delay systems with full state constraints. Int. J. Robust Nonlinear Control 31(5), 1497–1513 (2021)
Feng, Y., Zhou, M., Han, Q.L., Han, F., Cao, Z., Ding, S.: Integral-type sliding-mode control for a class of mechatronic systems with gain adaptation. IEEE Trans. Ind. Inf. 16(8), 5357–5368 (2020)
Gao, M., Yang, S., Sheng, L., Zhou, D.H.: Fault diagnosis for time-varying systems with multiplicative noises over sensor networks subject to Round-Robin protocol. Neurocomputing 346, 65–72 (2019)
Jiang, B., Staroswiecki, M., Cocquempot, V.: Fault accommodation for nonlinear dynamic systems. IEEE Trans. Autom. Control 51(9), 1578–1583 (2006)
Yu, J., Shi, P., Dong, W., Yu, H.: Observer and command-filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems. IEEE Trans. Ind. Electron. 62(9), 5962–5970 (2015)
Prajna, S., Papachristodoulou, A., Wu, F.: Nonlinear control synthesis by sum of squares optimization: a Lyapunov-based approach. In: 5th Asian Control Conference, Melbourne, Australia, pp. 157–165 (2004)
Sheng, L., Niu, Y., Wang, W., Gao, M., Geng, Y., Zhou, D.H.: Estimation of Toolface for dynamic point-the-bit rotary steerable systems via nonlinear polynomial filtering. IEEE Trans. Ind. Electron. 69(7), 7192–7201 (2022)
Niu, Y., Sheng, L., Gao, M., Zhou, D.H.: Accelerometer fault detection for rotary steerable drilling tool systems under strong noises. IEEE Trans. Instrum. Meas. 71, 3523311 (2022)
Wang, W., Tian, W., Wang, Z., Hua, W., Cheng, M.: A fault diagnosis method for current sensors of primary permanent-magnet linear motor drives. IEEE Trans. Power Electron. 36(2), 2334–2345 (2021)
Funding
This work was supported by the National Natural Science Foundation of China under Grants 62073339, 62173343, 62033008, the Natural Science Foundation of Shandong Province of China under Grants ZR2020YQ49, ZR2022ZD34, and the Research Fund for the Taishan Scholar Project of Shandong Province of China.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Proof of Theorem 1
Proof
Letting \(\vartheta =[\xi ^T,{\bar{v}}^T,\xi ^T_y]^T\), it has
Letting \({\bar{\vartheta }}=[e^T,\vartheta ^T]^T\), one has
Considering condition (10), it has
Moreover, for \(t\in [0,\infty )\), inequality (54) implies that
By using (55), we know \(V_e=e^TPe\le {\bar{q}}_e\), then it is clear that e converges to \(\varOmega _e\). The proof is complete. \(\square \)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ma, Y., Gao, M., Sheng, L. et al. Active fault tolerant control for polynomial nonlinear systems with asymmetric state constraints and measurement noise. Nonlinear Dyn 111, 14157–14175 (2023). https://doi.org/10.1007/s11071-023-08601-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08601-9