
Abstract
This paper proposes a composite method for the analysis of rigid body rotations based on Euler parameters. The proposed method contains three sub-steps, wherein for keeping as much low-frequency information as possible the first two sub-steps adopt the trapezoidal rule, and the four-point backward interpolation formula is used in the last sub-step to flexibly control the amount of high-frequency dissipation. On this basis, in terms of the relation between Euler parameters and angular velocity, the stepping formulations of the proposed method are further modified for maximizing the accuracy of the angular velocity. For the analysis of rigid body rotations, the accuracy of the proposed method can converge to second-order, and the amount of its high-frequency dissipation can smoothly range from one (conservative scheme) to zero (annihilating scheme). Additionally, in the proposed method, the constraints at the displacement and velocity levels are strictly satisfied, and the numerical drifts at the acceleration level can be effectively eliminated. Furthermore, the proposed method is generalized to the field of rigid-flexible multibody systems described by Euler parameters, and in this work, its implementation procedure is provided. Several benchmark rigid body rotations and rigid-flexible multibody problems show the advantages of the proposed method in stability, accuracy, dissipation, efficiency, and energy conservation.
























Similar content being viewed by others
Data availability
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
References
Sherif, K., Nachbagauer, K., Steiner, W., Lauβ, T.: A modified HHT method for the numerical simulation of rigid body rotations with Euler parameters. Multibody Syst. Dyn. 46, 181–202 (2019)
Holzinger, S., Gerstmayr, J.: Time integration of rigid bodies modelled with three rotation parameters. Multibody Syst. Dyn. 53, 345–378 (2021)
Nielsen, M.B., Krenk, S.: Conservative integration of rigid body motion by quaternion parameters with implicit constraints. Int. J. Numer. Meth. Engng. 92, 734–752 (2012)
Sherif, K., Nachbagauer, K., Steiner, W.: On the rotational equations of motion in rigid body dynamics when using Euler parameters. Nonlinear Dyn. 81, 343–352 (2015)
Pappalardo, C.M., Guida, D.: On the use of two-dimensional Euler parameters for the dynamic simulation of planar rigid multibody. Arch. Appl. Mech. 87, 1647–1665 (2017)
Nikravesh, P.E., Wehage, R.A., Kwon, O.K.: Euler parameters in computational kinematics and dynamics. Part 1. J. Mech. Trans. Autom. 107, 358–365 (1985)
Terze, Z., Muller, A., Zlatar, D.: Singularity-free time integration of rotational quaternions using non-redundant ordinary differential equations. Multibody Syst. Dyn. 38, 201–225 (2016)
Betsch, P., Siebert, R.: Rigid body dynamics in terms of quaternions: Hamiltonian formulation and conserving numerical integration. Int. J. Numer. Meth. Engng. 79, 444–473 (2009)
Xu, X.M., Luo, J.H., Wu, Z.G.: The numerical influence of additional parameters of inertia representations for quaternion-based rigid body dynamics. Multibody Syst. Dyn. 49, 237–270 (2020)
Bai, Q.S., Shehata, M., Nada, A.: Review study of using Euler angles and Euler parameters in multibody modeling of spatial holonomic and non-holonomic systems. Int. J. Dynam. Control 10, 1707–1725 (2022)
Terze, Z., Muller, A., Zlatar, D.: Lie-group integration method for constrained multibody systems in state space. Multibody Syst. Dyn. 34, 275–305 (2015)
Younes, A.B., Turner, J.D., Mortari, D., Junkins, J.L.: A survey of attitude error representations. Number AIAA-2012–4422, Presented to AIAA/AAS Astrodynamics Specialist Conference, Minneapolis, Minnesota, USA13–16 August 2012.
Pittelkau, M.E.: Rotation vector in attitude estimation. J. Guid. Control Dyn. 26, 855–860 (2003)
Verbin, D., Lappas, V.J.: Time-efficient angular steering laws for rigid satellites. J. Guid. Control Dyn. 34, 878–892 (2011)
Terze, Z., Zlatar, D., Pandza, V.: Aircraft attitude reconstruction via novel quaternion-integration procedure. Aerosp. Sci. Technol. 97, 105617 (2020)
Terze, Z., Zlatar, D., Vrdoljak, M., Pandza, V.: Lie group forward dynamics of fixed-wing aircraft with singularity-free attitude reconstruction on SO(3). J. Comput. Nonlinear Dynam. 12, 021009 (2017)
Rucker, C., Wensing, P.M.: Smooth parameterization of rigid-body inertia. IEEE Robot. Automat. Lett. 7, 2771–2778 (2022)
Tavasoli, A., Mohammadpour, O.: Dynamic modeling and adaptive robust boundary control of a flexible robotic arm with 2-dimensional rigid body rotation. Int. J. Adapt. Control Signal Process. 32, 891–907 (2018)
Shabana, A.A.: Dynamics of Multibody Systems. Cambridge University, New York (1987)
Hughes, T.J.R.: The Finite Element Method: Linear Static and Dynamic Finite Element Analysis. Prentice Hall, New Jersey (1987)
Chung, J., Hulbert, G.M.: A time integration algorithm for structural dynamics with improved numerical dissipation: the Generalized-α method. J. Appl. Mech. 60(2), 371–375 (1993)
Shao, H.P., Cai, C.W.: A three parameters algorithm for numerical integration of structural dynamic equations. Chin. J. Appl. Mech. 5(4), 76–81 (1988)
Hilber, H.M., Hughes, T.J.R., Taylor, R.L.: Improved numerical dissipation for time integration algorithms in structural dynamics. Earthq. Eng. Struct. D. 5, 283–292 (1977)
Terze, Z., Muller, A., Zlatar, D.: An angular momentum and energy conserving Lie-group integration scheme for rigid body rotational dynamics originating from Stormer–Verlet algorithm. J. Comput. Nonlinear Dyn. 10, 051005 (2015)
Butcher, J.C.: Numerical Methods for Ordinary Differential Equations. John Wiley and Sons, Chichester (2016)
Kennedy, C.A., Carpenter, M.H.: Diagonally implicit Runge-Kutta methods for stiff ODEs. Appl. Numer. Math. 146, 221–244 (2019)
Boom, P.D., Zingg, D.W.: Optimization of high-order diagonally-implicit Runge-Kutta methods. J. Comput. Phys. 371, 168–191 (2018)
Kim, Y.J., Bouscasse, B., Seng, S., Touze, D.: Efficiency of diagonally implicit Runge-Kutta time integration schemes in incompressible two-phase flow simulations. Comput. Phys. Commun. 278, 108415 (2022)
Jameson, A.: Evaluation of fully implicit Runge-Kutta schemes for unsteady flow calculations. J. Sci. Comput. 73, 819–852 (2017)
Pazner, W., Persson, P.: Stage-parallel fully implicit Runge–Kutta solvers for discontinuous Galerkin fluid simulations. J. Comput. Phys. 335, 700–717 (2017)
Ji, Y., Xing, Y.F.: A two-step time integration method with desirable stability for nonlinear structural dynamics. Eur. J. Mech. Solid. 94, 104582 (2022)
Zhang, H.M., Zhang, R.S., Masarati, P.: Improved second-order unconditionally stable schemes of linear multi-step and equivalent single-step integration methods. Comput. Mech. 67, 289–313 (2021)
Zhang, J.: A-stable linear two-step time integration methods with consistent starting and their equivalent single-step methods in structural dynamics analysis. Int. J. Numer. Methods Eng. 122, 2312–2359 (2021)
Dong, S.: BDF-like methods for nonlinear dynamic analysis. J. Comput. Phys. 229, 3019–3045 (2010)
Dahlquist, G.G.: A special stability problem for linear multistep methods. BIT 3, 27–43 (1963)
Bank, R.E., Coughran, W.M., Fichtner, W., Grosse, E.H., Rose, D.J., Smith, R.K.: Transient simulations of silicon devices and circuits. IEEE Trans. Electron Devices 32, 1992–2006 (1985)
Bathe, K.J., Baig, M.M.I.: On a composite implicit time integration procedure for nonlinear dynamics. Comput. Struct. 83, 2513–2534 (2005)
Chandra, Y., Zhou, Y., Stanciulescu, I., Eason, T., Spottswood, S.: A robust composite time integration scheme for snap-through problems. Comput. Mech. 55, 1041–1056 (2015)
Wen, W.B., Wei, K., Lei, H.S., Duan, S.Y., Fang, D.N.: A novel sub-step composite implicit time integration scheme for structural dynamics. Comput. Struct. 182, 176–186 (2017)
Xing, Y.F., Ji, Y., Zhang, H.M.: On the construction of a type of composite time integration methods. Comput. Struct. 221, 157–178 (2019)
Ji, Y., Xing, Y.F.: An optimized three-sub-step composite time integration method with controllable numerical dissipation. Comput. Struct. 231, 106210 (2020)
Li, J.Z., Zhao, R., Yu, K.P., Li, X.Y.: Directly self-starting higher-order implicit integration algorithms with flexible dissipation control for structural dynamics. Comput. Methods Appl. Mech. Eng. 389, 114274 (2022)
Kim, W.: An improved implicit method with dissipation control capability: the simple generalized composite time integration algorithms. Appl. Math. Model. 81, 910–930 (2020)
Noh, G., Bathe, K.J.: The Bathe time integration method with controllable spectral radius: The ρ∞-Bathe method. Comput. Struct. 212, 299–310 (2019)
Ji, Y., Xing, Y.F.: Optimization of a class of n-sub-step time integration methods for structural dynamics. Int. J Appl. Mech. 13, 2150064 (2021)
Liu, T.H., Huang, F.L., Wen, W.B., He, X.H., Duan, S.Y., Fang, D.N.: Further insights of a composite implicit time integration scheme and its performance on linear seismic response analysis. Eng. Struct. 241, 112490 (2021)
Zhang, J.Y., Shi, L., Liu, T.H., Zhou, D., Wen, W.B.: Performance of a three-substep time integration method on structural nonlinear seismic analysis. Math. Probl. Eng. 2021, 6442260 (2021)
Ji, Y., Zhang, H., Xing, Y.F.: New insights into a three-sub-step composite method and its performance on multibody systems. Mathematics 10, 2375 (2022)
Negrut, D., Ottarsson, G., Rampalli, R., Sajdak, A.: On an implementation of the Hiber–Hughes–Taylor method in the context of index 3 differential- algebraic equations of multibody dynamics. J. Comput. Nonlinear Dynam. 2, 73–85 (2007)
Fan, W., Zhu, W.D., Ren, H.: A new singularity-free formulation of a three-dimensional Euler-Bernoulli beam using Euler parameters. J. Comput. Nonlinear Dynam. 11, 041013 (2016)
Fan, W., Ren, H., Ju, R., Zhu, W.D.: On the approximation of the full mass matrix in the rotational – coordinate -based beam formulation. J. Comput. Nonlinear Dynam. 15, 041002 (2020)
Shabana, A.A., Yakoub, R.Y.: Three dimensional absolute nodal coordinate formulation for beam elements: theory. ASME J. Mech. Design 123, 606–613 (2001)
Yakoub, R.Y., Shabana, A.A.: Three dimensional absolute nodal coordinate formulation for beam elements implementation and applications. ASME J. Mech. Design 123, 614–621 (2001)
Betsch, P.: Energy-consistent numerical integration of mechanical systems with mixed holonomic and nonholonomic constraints. Comput. Methods Appl. Mech. Engrg. 195, 7020–7035 (2006)
Betsch, P., Janz, A.: An energy-momentum consistent method for transient simulations with mixed finite elements developed in the framework of geometrically exact shells. Int. J. Numer. Meth. Engng. 108, 423–455 (2016)
Xu, X.M., Luo, J.H., Feng, X.G., Peng, H.J., Wu, Z.G.: A generalized inertia representation for rigid multibody systems in terms of natural coordinates. Mech. Mach. Theory 157, 104174 (2020)
Terze, Z., Muller, A., Zlatar, D.: Lie-group integration method for constrained multibody systems in state space. Multibody System. Dyn. 34, 275–305 (2015)
Bruls, O., Cardona, A.: On the use of Lie group time integrations in multibody dynamics. J. Comput. Nonlinear Dynam. 5, 031002 (2010)
Betsch, P., Sanger, N.: On the use of geometrically exact shells in a conserving framework for flexible multibody dynamics. Comput. Methods Appl. Mech. Engrg. 198, 1609–1630 (2009)
Sun, J.L., Cai, Z.Z., Sun, J.H., Jin, D.P.: Dynamic analysis of a rigid-flexible inflatable space structure coupled with control moment gyroscopes. Nonlinear Dyn. (2023). https://doi.org/10.1007/s11071-023-08254-8
Hsiao, K.M., Lin, J.Y., Lin, W.Y.: A consistent co-rotational finite element formulation for geometrically nonlinear dynamic analysis of 3-D beams. Comput. Methods Appl. Mech. Engrg. 169, 1–18 (1999)
Ibrahimbegovic, A., Mikdad, M.: Finite rotations in dynamics of beams and implicit time-stepping schemes. Int. J. Numer. Meth. Engng. 41, 781–814 (1998)
Omar, M.A., Shabana, A.A.: A two-dimensional shear deformable beam for large rotation and deformation problems. J. Sound Vib. 243, 565–576 (2001)
Ji, Y., Xing, Y.F., Wiercigroch, M.: An unconditionally stable time integration method with controllable dissipation for second-order nonlinear dynamics. Nonlinear Dyn. 105, 3341–3358 (2021)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (12202058, 12172023, 11872090) the China Postdoctoral Science Foundation (2022M710386) and the Young Elite Scientists Sponsorship Program by BAST (BYESS2023344).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interest
The authors declare that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Implementation of the mTTBIF in rigid-flexible multibody systems
Appendix: Implementation of the mTTBIF in rigid-flexible multibody systems
The generalized coordinates q of the rigid -flexible multibody systems governed by Eq. (70) can be defined as
where x and e respectively stand for position vector and Euler parameters. Since the vector x and the vector e can be decoupled, the motion equations given in Eq. (70) can be rewritten as
When using the mTTBIF, the components of q with the Euler parameters are computed by
and the remaining components of q are calculated by the classical TTBIF [41].
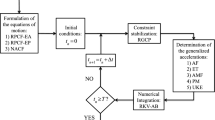
In the calculations, the increments of the three sub-steps can be obtained by the Newton–Raphson method in a uniform form, as follows:
where τ = t + γΔt, t + 2γΔt, or t + Δt, and the Jacobian matrix Gτ has the form as
Furthermore, if the motions of flexible bodies are described by the singularity-free elements [50, 51], the generalized coordinate vector q = e only includes Euler parameters and the motion equations governed by Eq. (70) become
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ji, Y., Xing, Y. A three-sub-step composite method for the analysis of rigid body rotations with Euler parameters. Nonlinear Dyn 111, 14309–14333 (2023). https://doi.org/10.1007/s11071-023-08410-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08410-0