
Abstract
In this paper, a new method named constrained parameter-splitting perturbation method for improving the solutions obtained from the parameter-splitting perturbation method is proposed for solving the problems in some extremal cases, such as the strongly nonlinear vibration of an Euler–Bernoulli cantilever. The proposed method takes the advantages of both the perturbation method and the harmonic balance method. The idea is that the solution obtained by the parameter-splitting perturbation method is substituted into the equation of motion and then the accumulative error of the equation is minimized for determining the unknown splitting parameters under the constraints constructed under the frame of harmonic balance method. The forced vibration of an oscillator with cubic geometric nonlinearity and inertia nonlinearity and the forced vibration of a planar microcantilever beam with a lumped tip mass are studied as examples to reveal the efficacy of the proposed method. The inspection of the steady-state response including its stability is conducted by means of comparing the frequency-response curves obtained by the proposed method with those obtained by the numerical continuation method and harmonic balance method, respectively, to show the efficacy and the advantages of the proposed method. Meanwhile, the nonlinear ordering effect on the solutions of the proposed method is also studied by comparing the results obtained by using different nonlinear orderings in the systems. In the last, we found through convergence examinations that it is necessary to have corrections to the erroneous solution which are obtained by harmonic balance method and Floquet theory in stability analysis.














Similar content being viewed by others


Data availability
Data sharing is not applicable to this article as any datasets were generated by presented formulas and analyzed during the current study.
References
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Wiley, Hoboken (2008)
Malatkar, P.: Nonlinear vibrations of cantilever beams and plates. Virginia Tech (2003)
Du, H.-E., Er, G.-K., Iu, V.P.: A novel method to improve the multiple-scales solution of the forced nonlinear oscillators. Int. J. Comput. Methods 16(04), 1843010 (2019)
Du, H.-E., Er, G.-K., Iu, V.P.: Parameter-splitting perturbation method for the improved solutions to strongly nonlinear systems. Nonlinear Dyn. 96(3), 1847–1863 (2019)
Du, H.-E., Er, G.-K. and Iu V.P.: A new method for the frequency response curve and its unstable region of a strongly nonlinear oscillator. In: Nonlinear Dynamics of Structures, Systems and Devices, pp. 65-74. Springer (2020)
Chen, S.H., Cheung, Y.K., Xing, H.X.: Nonlinear vibration of plane structures by finite element and incremental harmonic balance method. Nonlinear Dyn. 26(1), 87–104 (2001)
Akgün, D., Cankaya, I.: Frequency response investigations of multi-input multi-output nonlinear systems using automated symbolic harmonic balance method. Nonlinear Dyn. 61(4), 803–818 (2010)
Ju, P., Xue, X.: Global residue harmonic balance method for large-amplitude oscillations of a nonlinear system. Appl. Math. Model. 39(2), 449–454 (2015)
Zhou, S., Cao, J., Inman, D.J., et al.: Harmonic balance analysis of nonlinear tristable energy harvesters for performance enhancement. J. Sound Vib. 373, 223–235 (2016)
Panigrahi, B., Pohit, G.: Study of non-linear dynamic behavior of open cracked functionally graded Timoshenko beam under forced excitation using harmonic balance method in conjunction with an iterative technique. Appl. Math. Model. 57, 248–267 (2018)
Yuan, T.C., Yang, J., Chen, L.Q.: A harmonic balance approach with alternating frequency/time domain progress for piezoelectric mechanical systems. Mech. Syst. Signal Pr. 120, 274–289 (2019)
Yang, Y.F., Wu, Q.Y., Wang, Y.L., et al.: Dynamic characteristics of cracked uncertain hollow-shaft. Mech. Syst. Signal Pr. 124, 36–48 (2019)
Dai, H., Wang, X., Schnoor, M., et al.: Analysis of internal resonance in a two-degree-of-freedom nonlinear dynamical system. Commun. Nonlinear Sci. 49, 176–191 (2017)
Lau, S.L., Cheung, Y.K.: Amplitude incremental variational principle for nonlinear vibration of elastic systems. J. Appl. Mech. 48(4), 959–964 (1981)
Liu, W., Wu, B., Chen, X., et al.: Analytical approximate solutions for asymmetric conservative oscillators. Arch. Appl. Mech. 1–15 (2019)
Cveticanin, L.: Oscillator with fraction order restoring force. J. Sound Vib. 320(4–5), 1064–1077 (2009)
Zhou, Y., Wu, B., Lim, C.W., Sun, W.: Analytical approximations to primary resonance response of harminically forced oscillators with strongly general nonlinearity. Appl. Math. Model. 87, 534–545 (2020)
Nayfeh, A.H.: A perturbation method for treating nonlinear oscillation problems. Stud. Appl. Math. 44(1–4), 368–374 (1965)
Reyes, C., Caruntu, D.I.: Voltage response for parametrically actuated mems cantilever beam using homotopy analysis method and method of multiple scales. In: ASME 2018 Dynamic Systems and Control Conference. American Society of Mechanical Engineers, p. V003T42A002 (2018)
Meesala, V.C., Hajj, M.R.: Parameter sensitivity of cantilever beam with tip mass to parametric excitation. Nonlinear Dyn. 1–10 (2019)
Liu, C. X., Yan, Y., Wang, W.Q.: Primary and secondary resonance analyses of a cantilever beam carrying an intermediate lumped mass with time-delay feedback. Nonlinear Dyn. 1–21 (2019)
Burton, T.D., Rahman, Z.: On the multi-scale analysis of strongly non-linear forced oscillators. Int. J. Nonlinear Mech. 21(2), 135–146 (1986)
Cheung, Y.K., Chen, S.H., Lau, S.L.: A modified Lindstedt-Poincaré method for certain strongly non-linear oscillators. Int. J. Nonlinear Mech. 26(3–4), 367–378 (1991)
Pakdemirli, M., Karahan, M.M.F., Boyacı, H.: Forced vibrations of strongly nonlinear systems with multiple scales Lindstedt Poincare method. Math. Comput. Appl. 16(4), 879–889 (2011)
Rahman, Z., Burton, T.D.: On higher order methods of multiple scales on non-linear oscillations-periodic steady state response. J. Sound Vib. 133(3), 369–379 (1989)
Nayfeh, A.H., Lacarbonara, W.: On the discretization of distributed-parameter systems with quadratic and cubic nonlinearities. Nonlinear Dyn. 13, 203–220 (1997)
Lee, C.L., Lee, C.-T.: A higher order method of multiple scales. J. Sound Vib. 202(2), 284–287 (1997)
Luongo, A., Paolone, A.: On the reconsititution problem in the multiple time-scale method. Nonlinear Dyn. 19, 135–158 (1999)
Dankowicz, H., Lacarbonara, W.: On various representations of higher order approximations of the free oscillatory response of nonlinear dynamical systems. J. Sound Vib. 330, 3410–3423 (2011)
Pakdemirli, M.: Comparison of higher order versions of the method of multiple scales for an odd non-linearity problem. J. Sound Vib. 263, 989–998 (2003)
Cartmell, M.P., Ziegler, S.W., Khanin, R., Forehand, D.I.M.: Multiple scales analyses of the dynamics of weakly nonlinear mechanical systems. Appl. Mech. Rev. 56(5), 455–492 (2003)
Lam, D.C.C., Yang, F., Chong, A.C.M., Wang, J., Tong, P.: Experiments and theory in strain gradient elasticity. J. Mech. Phys. Solids 51, 1477–1508 (2003)
Khanchehgardan, A., Rezazadeh, G., Amiri, A.: Damping ratio in micro-beam resonators based on magneto-thermo-elasticity. J. Solid Mech. 9(2), 249–262 (2017)
Hozhabrossadati, S.M.: Exact solution for free vibration of elastically restrained cantilever non-uniform beams joined by a mass-spring system at the free end. IES J. Part A Civ. Struct. Eng. 8(4), 232–239 (2015)
Mason, D.P.: On the method of strained parameters and the method of averaging. Q. Appl. Math. 42(1), 77–85 (1984)
Karjanto, N.: On the method of strained parameters for a KdV type of equation with exact dispersion property. IMA J. Appl. Math. 80(3), 893–905 (2015)
Moreno-Pulido, S., García-Pacheco, F.J., Sánchez-Alzola, A., et al.: Convergence analysis of the straightforward expansion perturbation method for weakly nonlinear vibrations. Mathematics 9(9), 1036 (2021)
Funding
The results presented in this paper were obtained under the supports of the National Natural Science Foundation of China (Grant No. 12032009), the Science and Technology Development Fund, Macau SAR (Grant No. 042/2017/A1), and the Research Committee of University of Macau (Grant No. MYRG2018-00116-FST and MYRG2022-00169-FST).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendixes
Appendixes
1.1 A Mathematical modelling of an inextensible Euler–Bernoulli cantilever beam carrying a tip mass
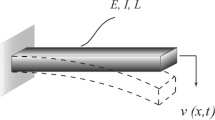
A planar and largely deflected cantilever beam carrying a lumped tip mass under a harmonic base motion is considered. The cantilever is assumed to be an isotropic and inextensible Euler–Bernoulli beam with an uniform cross section. The sketch of the simplified model under consideration is shown in Fig. 15.

Simplified model of the cantilever carrying a tip mass. m, EI, M, L, g, s, u, v are the mass per unit length of the cantilever, the bending stiffness of the cantilever, the mass of the tip mass, the length of the cantilever, ground acceleration, the arclength coordinate, the axial displacement and transverse displacement, respectively
1.1.1 A.1 Extended Hamilton’s Principle
By using the extended Hamilton’s principle as in [2], the functional \(\mathcal {I}\) is defined as
where \(t_1\), \(t_2\), \(\mathcal {L}\) and \(W_{nc}\) are the initial time instant, the final time instant, the Lagrangian of motion of the cantilever and the work done by the non-conservative force. The Lagrangian of motion \(\mathcal {L}\) of the cantilever beam and tip mass consists of two parts: \(\mathcal {L}_{beam}\) and \(\mathcal {L}_{tip}\).
\(\mathcal {L}_{tip}\) is simplified as (1. since the tip mass is considered as a point mass, only the translational kinetic energy is considered; 2. the potential energy \(V_{tip}\) only consists of gravitational potential energy as the concentrated mass is not deformable; 3. the gravitational potential energy is considered in the work done by the gravity force instead of considering in the potential energy since \(-V_{tip}=W_{g}\))
where M is the mass of the concentrated tip mass and \(\delta (\cdot )\) is the Dirac’s delta function. The Lagrangian of motion of the cantilever \(\mathcal {L}_{beam}\) is defined as
where \(T_{beam}\) is the kinetic energy of the beam, \(V_{beam}\) is the potential energy of the beam and \(\ell _{beam}\) is the specific Lagrangian of the beam. The kinetic energy of the beam \(T_{beam}\) consists of translational kinetic energy and rotational kinetic energy. The translational kinetic energy is given by
where m is the mass per unit length of the beam and the rotational kinetic energy is given by
where \(J_z\) is the mass moment of inertia about z axis per unit length of the cantilever and it is defined as
in which \(\rho \) denotes the mass density of the cantilever and A denotes the area of the cross section of the cantilever beam located at a distance s from the origin in the (x, y, z) coordinate system. As the cross section of the cantilever is uniform, \(J_z\) is a constant. Hence, the total kinetic energy of the beam can be written as
In our derivation, the gravitational potential energy is not include in the potential energy. The gravitational potential energy will be considered as work done of gravity force in \(W_{nc}\) as in [2]. The potential energy V can be determined from the corresponding strain energy \(U_{beam}\) for the cantilever beam considered here is given by
where \(\sigma _{11}\) denotes the normal stress in \(\xi \) direction. In Eq. (30), it is assumed that the cantilever beam is an elastic structure with a linear stress–strain relationship and \(\varepsilon _{22}=\gamma _{12}=0\). With Hooke’s law and neglecting Poisson’s effect, it gives \(\sigma _{11}\approx {E\varepsilon _{11}}\), where E is Young’s modulus of the beam material. Substituting this relation and the expressions of strain component into Eq. (30), we obtain
Eq. (31) can be written as
where \(D_z=E\iint _A(-\eta \rho _z^2)^2\,d\eta {dz}\) is the bending stiffness of the beam. The total kinetic energy T is given by
in which \(\ell \) is the specific Lagrangian of the whole system. As we discussed in the introduction of this section, the Lagrange multiplier \(\lambda (s,t)\) is used to enforce the inextensionality constraint. With Eqs. 32 and 33 and the inextensionality constraint \((1+u')^2+v'^2=1\), we write the specific Lagrangian of the whole system \(\ell \) as follows:
As mentioned above, the gravitational potential energy is considered as the work done by the gravity force, the variation of work done by the non-conservative force and gravity force is given by
where \(Q_u\) is non-conservative force and gravity force projection in u direction, \(Q_v\) is non-conservative force and gravity force projection in v direction, \(c_u\) is the damping coefficient in u direction and \(c_v\) is the damping coefficient in v direction. Substituting Eqs. (34) and (35) into Eq. (23) leads to
where \(Q_u=-mg\sin (\theta )-Mg\sin (\theta )\delta (s-L)\), \(Q_v=mg\cos (\theta )+Mg\cos (\theta )\delta (s-L)\) and base motion \(v=\bar{v}+v_0\cos (\varOmega t)\). Following the procedures proposed in [2], the integro-differential equation representing the equation of motion of the system is then obtained as
where v is the displacement relative to the neutral axis; \(v_0\) is the displacement amplitude of ground motion; the over dot represents the partial derivative with respect to time; the prime represents the partial derivative with respect to space; t is the time, m is the mass per unit length of the cantilever; M is the mass of the lumped mass; v is the transverse deflection of the harvester; \(c_v\) is the damping coefficient of the harvester; \(D_\zeta \) is the bending stiffness of the cantilever; \(\bar{M}=\big [m+M\delta (s-L){\big ]}\) and \(Q_v\) is the transverse loading.
1.1.2 A.2 Model reduction by Galerkin discretization
The linear eigenvalues and eigenvectors of the undamped free vibration of a uniform cantilever beam with or without lumping tip mass indicate the natural frequencies and mode functions of the linear structure, or called the linear natural frequencies and mode functions of the structure for short in the following analysis. The ith mode function of the system is given by Eq. (39) as shown in [34]. The characteristic equation of a uniform cantilever carrying a lumped tip mass is expressed by
where \(\lambda \) is the characteristic root, L is the length of the cantilever and \(\nu \) is the proof mass ratio expressed as \(\nu =\frac{M}{mL}\). With the ith characteristic root, the ith mode function of a cantilever with uniform cross section and carrying a lumped tip mass is
where s is the arclength coordinate and \(\chi \) is given as
in which \(\mu =-\nu \lambda L\).
In this paper, the above natural frequencies and the mode functions are adopted to formulate the equation of motion of the system. By Galerkin’s method, the transverse displacement of the cantilever in Eq. (37) is assumed in the following form
where N is a positive integer. A set of ordinary differential equations can then be formulated by Galerkin’s method. Finally, the modal coordinates \(q_i(t) (i=1,2,\ldots ,N)\) can be determined by solving the ordinary differential equations with numerical method such as fourth-order Runge–Kutta method or analytical method such as HB method. Due to simplicity and the attention restriction to the examination of accuracy of stability analysis done by various analytical methods, only one mode function \(\varPhi _i(s)\) is used in the Galerkin’s discretization procedure. Therefore, substituting Eq. (41) along with \(N=1\) and the first (\(i=1\)) mode function into Eq. (37) and integrating with respect to s from 0 to L lead to the single-mode response of the simplified VEH
where the spatial integrals \(\mathbb {A}_i\,(i=1,\ldots ,6)\) are given in the following and q is adopted instead of \(q_1\) for simplicity.
where \(i=1\). With the following definitions being \(\hat{c}\equiv \frac{\mathbb {A}_2}{\mathbb {A}_1}\), \(\hat{\alpha }\equiv \frac{\mathbb {A}_5}{\mathbb {A}_1}\), \(\hat{\beta }\equiv \frac{\mathbb {A}_5}{\mathbb {A}_1}\), \(\hat{\eta }\equiv \frac{\mathbb {A}_4}{\mathbb {A}_1}\), \(\omega _0^2\equiv \frac{\mathbb {A}_3}{\mathbb {A}_1}\) and \(\hat{F}\equiv \frac{\mathbb {A}_6}{\mathbb {A}_1}\), Eq. (42) can be deduced to be Eq. (1).
1.2 B Nth-order C-PSMS method for the primary resonance analysis of a harmonically forced second-order oscillator with general polynomial nonlinearity
1. Procedures for MTS analysis
A second-order oscillator with general polynomial nonlinearity is given as
where the means of the symbols are the same as those in Eq. (2). The solution to Eq. (49) and the scales of time are expressed as a power series of the perturbation parameter \(\varepsilon \) as follows:
The operators of time derivatives are given as
where \(D_i=\partial /\partial {T_i}\). The derivatives of y are expressed as follows:
The nonlinearity \(g({\varvec{\alpha }},y,\dot{y},\ddot{y})\) is a polynomial function of y, \(\dot{y}\) and \(\ddot{y}\), which can be written as
where
where
2. Parameter splitting
Different from the classical MTS method, the natural frequency \(\omega _0^2\) and the nonlinear coefficients \(\alpha _m\) are expanded as power series of \(\varepsilon \) as
The splitting parameters are defined as
Substituting Eqs. (50)–(59) into Eq. (49), and equating the coefficients of \(\varepsilon ^m\,\,\,(m=0,1,\ldots ,N)\) to zeros lead to \(N+1\) differential equations given in the following.
Order \(O(\varepsilon ^0)\):
order \(O(\varepsilon ^1)\):
where \({\varvec{\alpha }_0}=\{\alpha _{0_0},\alpha _{1_0},\ldots ,\alpha _{M_0}\}\), order \(O(\varepsilon ^i)\):
where
Equation (61) is a homogenous differential equation and the solution to it is
where \(C(T_1,\ldots ,T_N)=Ae^{i\gamma }\) and c.c. stands for the complex conjugation. A is the response amplitude and \(\gamma \) is the phase angle. They are functions of \(T_1,\ldots ,T_N\). After that, Eqs. (62) and (63) can be solved in succession. The analytical approximation \(y_a\) can be obtained easily. It is clear that \(y_a\) is a function of the splitting parameters \({\varvec{\varTheta }}_{{\varvec{s}}}\). By eliminating the secularity and introducing the detuning of the excitation frequency, the modulations on response amplitude A and phase angle \(\gamma \) can be deduced as two first-order differential equations. It should be noted that the elimination of secularity is different when different perturbation method is adopted. In our analysis, the MTS method is chosen. Therefore, the suppression on the secularity is conducted by setting the coefficient of the resonant term to be zero with the partial derivatives with respect to different time scales introduced in MTS method. If the someone adopted the method like Lindstedt-Poincaré method, the secularity is removed by the ‘strained’ frequency \(\omega _1\) as shown in [1, 35,36,37]
3. Constraints
The constraints are constructed with Eqs. (11)-(13).
4. Determining the splitting parameters
Unlike the MTS method, the FRC and the response to Eq. (2) are still unknown as \({\varvec{\varTheta }}_{{\varvec{s}}}\) are unknowns. Therefore, the splitting parameters \({\varvec{\varTheta }}_{{\varvec{s}}}\) are determined by minimizing \(R_e\) defined in Eq. (6) under the constraints introduced in Section 2 with Eqs. (9) and (10). The complete FRC can be obtained by varying the excitation frequency \(\varOmega \) as it is by PSMS method in [4]. One technique is adopted to accelerate the computation of the FRC. The splitting parameters at \(\varOmega =\varOmega _i\) are defined as \({\varvec{\varTheta }}_{{\varvec{s}}}^{(i)}\). The \({\varvec{\varTheta }}_{{\varvec{s}}}^{(i)}\) is adopted as the initial guess of the parameters when \(\varOmega =\varOmega _{i+1}=\varOmega _i+\varDelta \varOmega \) during the minimization procedure. \(\varDelta \varOmega \) is a small step of \(\varOmega \).
1.3 C Constraints derivations
Derivation of the constraints given by Eqs. (9) and (10) is given in the following. The analytical approximation obtained by the PSP method can be expressed as a series with preservation of \(m+1\) terms.
with \(\tau =\varOmega t+\theta \).
Therefore,
It should be noted that the dot represents the derivation with respect to time t in Eq. (13). Substituting Eqs. 67 and 68 into Eq. (13) leads to
where \(\varepsilon {g({\varvec{\alpha }},y_a,\dot{y}_a,\ddot{y}_a)}\) is given as
in which
where
After trigonometric identities, Eq. (71) can be expressed as
where \(E_{s,k}\) and \(E_{c,k}\) are the sum of the coefficients in front of \(\sin (k\tau )\) and \(\cos (k\tau )\), respectively.
Preserving the first m terms in Eq. (13) leads to
The amplitudes of like harmonics can be obtained by using orthogonality with \(\int _{0}^{2\pi }\cos (i\tau )\cos (j\tau )d\tau =0\) (if \(i\ne {j}\)), \(\int _{0}^{2\pi }\cos (i\tau )\sin (j\tau )d\tau =0\) (for any i, j) and \(\int _{0}^{2\pi }\sin (i\tau )\sin (j\tau )d\tau =0\) (if \(i\ne {j}\)).
where \(X_k\) and \(x_k\) are the amplitudes of terms \(\cos (k\tau )\) and \(\sin (k\tau )\), respectively. Observing from Eq. (74), the forcing term \(F\varepsilon \cos (\varOmega {t})\) also needs to be balanced. Therefore, specially, for the harmonics with \(k=1\) we have
With trigonometric identities, it can be rewritten as
As the above equation holds for any t. Therefore, it can split into two equations by collecting the coefficients of the terms \(\cos (\varOmega {t})\) and \(\sin (\varOmega {t})\). They are given in the following, respectively.
Summing the square of the above equations up leads to the following constraint.
For any \(k\ne 1\), we have
As the above equation holds for any t. Therefore, it can split into two equations by collecting the coefficients of the terms \(\cos (\varOmega {t})\) and \(\sin (\varOmega {t})\). They are given in the following, respectively.
Summing the square of the above equations up leads to the following constraint.
which turns into
From the above deductions, it is clear to see that the nonlinear algebraic equations adopted in the constraints are same of the nonlinear algebraic equations generated by using a classical HB method.
1.4 D Symbolic expressions
Expressions of \(A_1\), \(A_3\), \(A_5\), \(\varGamma _1\) and \(\varGamma _2\) are given in the following.
The classical second-order MTS analytical approximation to Eq. (1) is given by
where
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Du, HE., Er, GK., Iu, V.P. et al. Constrained parameter-splitting perturbation method for the improved solutions to the nonlinear vibrations of Euler–Bernoulli cantilevers. Nonlinear Dyn 111, 9025–9047 (2023). https://doi.org/10.1007/s11071-023-08315-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08315-y