
Abstract
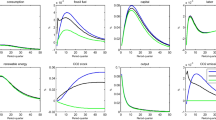
Since the proposal of China’s double carbon goal, it has attracted wide attention from all walks of life. In order to study the impact of energy, economy and the time it takes for carbon dioxide released into the atmosphere to be completely absorbed on China’s future carbon emission and carbon absorption trend, and to provide estimates and suggestions for China’s carbon neutrality in future, we establish a carbon emission–carbon absorption model with time delay. First, we calculate the equilibrium of the model and analyze the stability of the equilibrium and then further analyze the existence of the Hopf bifurcation of the equilibrium, the Hopf bifurcation normal form of the model is derived by using the multiple time scales method, and the Hopf bifurcation direction and the stability of the bifurcation periodic solution are determined. Finally, we fit and analyze the official data, give the actual model parameters and use MATLAB to carry out numerical simulations to verify the correctness of the theoretical analysis. We find that numerically periodic solutions exist in a wide range around time delay. According to our model, the final results show that China will reach the carbon peak in 2027, but according to the current development model and carbon absorption level of China, carbon neutrality cannot be achieved before 2060. In this regard, we put forward relevant policies and suggestions to accelerate the realization of carbon neutrality.









Similar content being viewed by others
Data availability
The datasets used or analyzed during the current study are available from the corresponding author on reasonable request.
References
Qiao, W., Lu, H., Zhou, G., et al.: A hybrid algorithm for carbon dioxide emissions forecasting based on improved lion swarm optimizer. J. Clean. Prod. 244, 118612 (2020)
Xu, L., Shi, Y., Fang, H., et al.: Vegetation carbon stocks driven by canopy density and forest age in subtropical forest ecosystems. Sci. Total Environ. 631–632, 619–626 (2018)
Tong, X., Chen, K., Li, G.: Influencing Factors Analysis and Trend Forecasting of China’s Carbon Emissions-Empirical Study Based on STIRPAT and GM(1,1) Models. J. Northeast. Univ. (Nat. Sci.) 36(2), 297–300 (2015)
Liu, G., Zhao, T.: Influencing factors and dynamic effect analysis of China’s carbon emission intensity LIU Guangwei. Resour. Sci. 34(11), 2106–2114 (2012)
Xu, S., He, Z., Long, R.: Factors that influence carbon emissions due to energy consumption in China: decomposition analysis using LMDI. Appl. Energy 127, 182–193 (2014)
Niu, D., Wang, K., Wu, J., et al.: Can China achieve its 2030 carbon emissions commitment? Scenario analysis based on an improved general regression neural network. J. Clean. Prod. 243, 118558 (2020)
Wen, L., Yuan, X.: Forecasting \(\rm CO_2 \) emissions in Chinas commercial department, through BP neural network based on random forest and PSO. Sci. Total Environ. 718, 137194 (2020)
Wang, Q., Chiu, Y., Chiu, C.: Driving factors behind carbon dioxide emissions in China: a modified production-theoretical decomposition analysis. Energy Econ. 51, 252–260 (2015)
Henriques, S.T., Borowiecki, K.J.: The drivers of long-run \(\rm CO_2 \) emissions in Europe, North America and Japan since 1800. Energy Policy 101, 537–549 (2017)
Ma, X., Jiang, P., Jiang, Q.: Research and application of association rule algorithm and an optimized grey model in carbon emissions forecasting. Technol. Forecast. Soc. 158, 120159 (2020)
Xu, W., Jin, X., Liu, J., et al.: Analysis of spatio-temporal changes in forest biomass in China. J. Forestry Res. 33(1), 261–278 (2021)
Chen, Z., Yu, G., Wang, Q.: Effects of climate and forest age on the ecosystem carbon exchange of afforestation. J. Forestry Res. 31(2), 365–374 (2020)
Xu, H., Zhang, C., Li, W., et al.: Economic growth and carbon emission in China: a spatial econometric Kuznets curve? Zb. Rad. Ekon. Fak. Rije. 36(1), 11–28 (2018)
Zhang, Q., Zhang, Y., Pan, B.: Analysis of factors affecting China’s economic growth and carbon emissions during the 40 years of reform and opening. J. Arid Land Resour. Environ. 33(10), 9–13 (2019)
National Statistic Bureau.: China Statistical Yearbook 2021. China Statistic Press, Beijing (2021)
Zhou, X., Zhang, J., Li, J.: Industrial structural transformation and carbon dioxide emissions in China. Energy Policy 57, 43–51 (2013)
Gu, A., He, C., Lv, Z.: Industrial structure changes impacts on carbon emissions in China based on LMDI method. Resour. Sci. 38(10), 1861–1870 (2016)
Hong, Y.: Study on carbon emissions of industry structure and energy structure changes: an empirical test by using environmental Kuznet curve. Environ. Sci. Technol. 38(8), 266–272 (2015)
Wiggins, S.: Introduction to applied nonlinear dynamical systems and chaos. Springer, New York (1990)
Balachandran, B., Kalm-Nagy, T., Gilsinn, D.E.: Delay differential equations. Springer, Berlin (2009)
Lelkes, J., Kalmar-Nagy, T.: Bifurcation analysis of a forced delay equation for machine tool vibrations. Nonlinear Dyn. 98(4), 2961–2974 (2019)
Song, Y., Peng, Y., Zhang, T.: The spatially inhomogeneous Hopf bifurcation induced by memory delay in a memory-based diffusion system. J. Differ. Equ. 300, 597–624 (2021)
Ding, Y., Cao, J., Jiang, W.: Double Hopf bifurcation in active control system with delayed feedback: application to glue dosing processes for particleboard. Nonlinear Dyn. 83(3), 1567–1576 (2016)
Ding, Y., Zheng, L.: Mathematical modeling and dynamics analysis of delayed nonlinear VOC emission system. Nonlinear Dyn. 109(4), 3157–3167 (2022)
Liu, X., Ding, Y.: Stability and numerical simulations of a new SVIR model with two delays on COVID-19 booster vaccination. Mathematics. 10(10), 1772 (2022)
Cahlon, B., Schmidt, D.: Asymptotic stability of a mechanical robotics model with damping and delay. J. Math. Anal. Appl. 303(1), 36–53 (2005)
Jia, J., Wang, M., Li, M.: Periodic solutions for impulsive delay differential equations in the control model of plankton allelopathy. Chaos Soliton. Fract. 32(3), 962–968 (2007)
Kuznetsov, Y.A.: Elements of applied bifurcation theory, 3rd edn. Springer, New York (2004)
Hassard, B.D., Kazarinoff, N.D., Wan, Y.H.: Theory and applications of Hopf bifurcation. Cambridge University Press, Cambridge (1981)
Faria, T., Magalhaes, L.T.: Normal forms for retarded functional differential equations with parameters and applications to Hopf bifurcation. J. Differ. Equ. 122(2), 181–200 (1995)
Ju, Y., Chen, Y.: Calculation of carbon emission in building operation stage-research on emission coefficient method based on carbon emission factor. Sichuan Build. Sci. 41(03), 175–179 (2015)
Jalil, A., Feridun, M.: Energy-driven economic growth: energy consumption-economic growth nexus revisited for China. Emerg. Mark. Financ. Tr. 50(5), 159–168 (2015)
Nayfeh, A.H.: Order reduction of retarded nonlinear systems-the method of multiple scales versus center-manifold reduction. Nonlinear Dyn. 51, 483–500 (2008)
Das, S.L., Chatterjee, A.: Multiple scales without center manifold reductions for delay differential equations near Hopf bifurcations. Nonlinear Dyn. 30, 323–335 (2002)
Cong, J., Zhu, J., Chen, N., et al.: Comparison and case analysis of carbon emission accounting methods for urban energy consumption in China-based on the selection of “emission factor’’ and “activity level data’’. Urban Probl. 03, 5–11 (2014)
Funding
This study was funded by the Fundamental Research Funds for the Central Universities of China (Grant No. 2572022DJ06) and College Students Innovations Special Project funded by the Northeast Forestry University of China (No. 202210225155).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Appendix
Appendix
We regard the delay \(\tau \) as a bifurcation parameter, let \(\tau =\tau _c+\varepsilon \mu \), where \(\tau _c=\tau ^{(j)}(j = 0, 1, 2, \cdots )\) is the critical value of Hopf bifurcation given in (7), \(\mu \) is the disturbance parameter and \(\varepsilon \) is the dimensionless scale parameter. Suppose system (10) undergoes a Hopf bifurcation from the trivial equilibrium E at the critical point \(\tau = \tau _c\), and then, the solution of (10) is assumed as follows:
where \(T_0=t, T_1=\varepsilon t, T_2=\varepsilon ^2 t,\cdots \), and we can get
and the derivative with regard to t is transformed into
where \(D_i\) is differential operator, and
Then, we obtain
We expand \(x(T_0 -1,\varepsilon (T_0 -1),\varepsilon ^2 (T_0 -1),\cdots )\) at \(x(T_0 -1,T_1,T_2,\cdots )\) by the Taylor-series expansion, and we get
where \(x_{j,\tau _c} = x_j (T_0 -1,T_1,T_2,\cdots ), j=1,2,3,\cdots .\)
Substituting Eqs. (15)–(17) into Eq. (10), after obtaining the equation, let the coefficients of \(\varepsilon \), \(\varepsilon ^2\) and \(\varepsilon ^3\) on both sides of the equation be equal. So, we get the following expression:
The solution of (18) is given as follows:
where \(Q = Q(T_1, T_2,\cdots )\), h is obtained from (15). Thus, substituting solution (21) into the right part of Eq. (19) and assuming the coefficient vector of \(\mathrm {e}^{\mathrm {i} \omega \tau _c T_0}\) is noted as \(m_1\), by \(\langle h^*, m_1 \rangle =0\), we can solve \(\frac{\partial Q}{\partial T_1}\), namely
where
with
Solving Eq. (19), we get its solution in the following form:
Then, substituting solution (23) into Eq. (19), we get
with
Next, substituting solutions (21) and (23) into (20) and assuming the coefficient vector of \(\mathrm {e}^{\mathrm {i} \omega \tau _c T_0}\) is noted as \(m_2\), by solvability condition, we get \(\langle h^*, m_2\rangle =0\). Note that \(\mu \) is disturbance parameter, and \(\mu ^2\) has little influence for small unfolding parameter, thus, we ignore the \(\mu ^2 G\) term, and then, \(\frac{\partial G}{\partial T_2}\) can be solved in the following form:
where
with
Let \(Q \rightarrow Q/\varepsilon \), we obtain the normal form of Hopf bifurcation of system (1) truncated at the cubic order terms
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wei, C., Hou, Y. & Ding, Y. Analysis of dynamic properties of carbon emission–carbon absorption model with time delay based on China. Nonlinear Dyn 111, 4863–4877 (2023). https://doi.org/10.1007/s11071-022-08053-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-08053-7