
Abstract
The purpose of this article is to solve the fragile problem of prescribed performance control (PPC) with application to Waverider Vehicles (WVs). By fragile problem, it denotes that tracking errors may break away from prescribed funnels if actuators are saturated. Firstly, we propose a new type of readjusting prescribed performance which adaptively readjusts its prescribed funnels such that the spurred transient performance and steady-state performance are still guaranteed for tracking errors in the presence of actuator saturation. Then, we extend the finite-time PPC into the non-affine model of WVs, ensuring that tracking errors always evolve within prescribed funnels. Furthermore, the improved back-stepping procedure without the derivation of virtual control law is utilized to develop non-fragile tracking controllers, and specially, there is no need of any fuzzy/neural approximation, avoiding the computational burden problem. Finally, compared simulation results are presented to verify the effectiveness and advantage.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Waverider Vehicles (WVs) have been regarded as the most promising technology for feasible and affordable hypersonic flight. The flight control design, which is the key technique to ensure safe flight and successful completion of flight missions, has caused worldwide concerns [1,2,3,4,5]. The special dynamics of WVs, including uncertainty, nonlinearity, non-affine property, saturation and coupling, leads to control challenges. The current focus of flight control for WVs is mainly on pursing excellent robustness and accuracy under certain conditions such as actuator saturation/fault and uncertainties/disturbances via fuzzy/neural-based intelligent control [6,7,8], sliding mode control [9], back-stepping control [10,11,12], and fault-tolerant control [13, 14]. However, all of them are unable to guarantee control system with satisfactory transient performance which is crucial to realize hypersonic maneuvering flight for WVs [15, 16].
The prescribed performance control (PPC), firstly proposed by Bechlioulis et al. [17, 18], is a pioneering methodology which is expected to provide an effective tool to ensure desired transient and steady-state performance. The main ideal of PPC is to devise a type of prescribed funnels called performance functions whose shapes can be designed as needed [19,20,21,22]. The developed controllers based on PPC are capable of guaranteeing that tracking errors always evolve within prescribed funnels such that both the transient performance and the stead-state performance are satisfactory. In the existing studies [23, 24], prescribed performance guaranteed tracking controllers were exploited for WVs. Though tracking errors satisfy the desired prescribed performance, those methods [23, 24] require that the models of WVs must have affine formulations, which cannot be directly obtained owing to the nonlinear characteristics. It is for this reason that non-affine-model-based PPC schemes were investigated for WVs in [7, 15, 16]. Furthermore, to reject system uncertainties and disturbances, fuzzy/neural approximations are commonly used methods [7, 15, 16, 23, 24] to enhance the robustness performance. However, too much online learning/computation burden caused by fuzzy/neural approximations undoubtedly harms the real-time performance of control system, which is not conducive to realize hypersonic maneuvering flight for WVs. Besides, to improve the operability and practicability, some researchers proposed improved versions of PPC with finite-time convergence [16, 22] such that the regulation time can be quantitatively designed as needed.
Despite the above developments of PPC, a facing defect is the fragile problem. By fragile problem, we mean that tracking errors may break away from prescribed funnels if actuators are saturated. The flight airspace of WVs is so high that it easily leads to actuator saturation. The actuator saturation will inevitably result in error increasing such that tracking errors show the trend of breaking away from prescribed funnels, yielding the fragile problem. Unfortunately, the existing PPC strategies [3, 8, 16,17,18,19,20,21,22,23,24] did not take into consideration actuator saturation since all of them couldn’t deal with the fragile problem. In view of this, we propose a novel non-fragile tracking controller with readjusting prescribed performance for WVs subject to actuator saturation. The addressed controllers are developed based on non-affine models of WVs. Moreover, there is no need of fuzzy/neural approximation, reducing online learning computation burden. The main contributions are listed as follows.
-
(1)
The addressed method avoids the limitations of previous finite-time PPC (FPPC) approaches [23, 24] that they are only suitable for affine dynamic systems. In this article, FPPC is extended into the non-affine model of WVs.
-
(2)
The developed controller doesn’t require neural/fuzzy approximation [7, 15, 16, 23] that may cause lots of online learning parameters. As a result, the computation burden of the design is satisfactory.
-
(3)
The proposed approach handles the fragile problem of PPC that the existing PPC strategies [8, 16,17,18,19,20,21,22,23,24] cannot deal with actuator saturation. In this article, by proposing a new kind of readjusting prescribed performance, both desired transient performance and steady-state performance are guaranteed for tracking errors in finite time under actuator saturation.
The rest of this paper is structured as follows. Section 2 presents problem statement. Section 3 shows the control design process. Section 4 provides the simulation results, and Sect. 5 gives the conclusions.
2 Problem statement
2.1 Vehicle model
We consider the following nonlinear model of an WV [25] whose map of geometry and force is shown in Fig. 1.
The vehicle model has five rigid-body states, i.e., velocity (\(V \in {\Re _{ > 0}}\)), altitude (\(h \in {\Re _{ > 0}}\)), flight-path angle(\(\gamma \in \Re \)), pitch angle (\(\theta \in \Re \)) and pitch rate (\(Q \in \Re \)), and two flexible states (\({\eta _{\text {1}}} \in \Re \) and \({\eta _{\text {2}}} \in \Re \)). The control inputs (fuel equivalence ratio \(\Phi \in {\Re _{ > 0}}\) and elevator angular deflection \({\delta _e} \in \Re \)) are implied in trust force T, drag force D, lift force L, pitching moment M, and generalized forces \(N_1\) and \(N_2\) [25], given by

Geometry and force map of an WV
All the coefficients and variables in the above equations are clearly defined in [25] and also are listed in the Nomenclature (See the Appendix).
2.2 The Fragility of prescribed performance
By prescribed performance we mean that the tracking error \(e(t):{\Re _{ \ge 0}} \rightarrow \Re \) evolves within prescribed funnels \({\rho _L}(t):{\Re _{ \ge 0}} \rightarrow {\Re _{ < 0}}\) and \({\rho _R}(t):{\Re _{ \ge 0}} \rightarrow {\Re _{ > 0}}\) that are also called performance functions, that is, \({\rho _L}(t)< e(t) < {\rho _R}(t)\) holds for all \(t \in {\Re _{ \ge 0}}\) if e(0) satisfies \({\rho _L}(0)< e(0) < {\rho _R}(0)\), as depicted in Fig. 2a. The overshoot of e(t) is no more than \(\max \left\{ { - {\rho _L}(0),{\rho _R}(0)} \right\} \) and the steady-state value of e(t) is less than \(\max \left\{ { - {\rho _L}(\infty ),{\rho _R}(\infty )} \right\} \). Thus, prescribed behaviours including the transient performance (i.e., overshoot and convergence time) and the steady-state performance (i.e., steady-state error) can be guaranteed for e(t).
It is impossible to devise feed-back controllers by directly using the constraint formulation \({\rho _L}(t)< e(t) < {\rho _R}(t)\). In order to facilitate controller design, we introduce the following equivalent form
with \(S_\varepsilon ^e\left( {{\varepsilon _e}(t)} \right) = \frac{{{e^{{\varepsilon _e}(t)}}}}{{1 + {e^{{\varepsilon _e}(t)}}}}:\Re \rightarrow \left( {0,1} \right) \). The transformed error \({\varepsilon _e}(t) \in \Re \) is derived from (8) as
The transformed error \({\varepsilon _e}(t) \in \Re \), instead of the initial tracking error e(t), will be utilized for control feedback. Hereon, we stress the fragile problem of the existing PPC methodologies when there exists actuator saturation. When actuator is saturated, the tracking error e(t) will inevitably increase [26], making e(t) close to (even exceed) the prescribed funnels \({\rho _L}(t)\) and \({\rho _R}(t)\), as shown in Fig. 2b. From (9), we know that \({\varepsilon _e}(t) \rightarrow - \infty \) as \(e(t) \rightarrow {\rho _L}(t)\) and \({\varepsilon _e}(t) \rightarrow + \infty \) as \(e(t) \rightarrow {\rho _R}(t)\). The non-convergence of \({\varepsilon _e}(t)\) will cause control singularity problem.

Prescribed performance; a without actuator saturation, b with actuator saturation
2.3 Readjusting prescribed performance
To handle the singularity problem, we propose an alternative PPC approach that is able to adaptively readjust its prescribed funnel, namely the Readjusting Prescribed Performance, given by
where \(p_\text {lower}^e(t):{\Re _{ \ge 0}} \rightarrow {\Re _{ < 0}}\) and \(p_\text {upper}^e(t):{\Re _{ \ge 0}} \rightarrow {\Re _{ > 0}}\) are newly developed performance functions
with \(p_\text {lower}^e(t) = - p_\text {upper}^e(t)\), \(p_0^e( \in {\Re _{> 0}})> p_{T_{FT}^e}^e( \in {\Re _{ > 0}})\), \(T_{FT}^e \in {\Re _{ > 0}}\), \({p^e}(t) = \kappa _2^etanh\left( {\kappa _1^e{\text {abs}}\left( {u - {u_d}} \right) } \right) \), \(\kappa _1^e \in {\Re _{ > 0}}\) and \(\kappa _2^e \in {\Re _{ > 0}}\), where \({u_d} \in \Re \) is the ideal value of the control input \(u \in \Re \), and \({\text {abs}}\left( {u - {u_d}} \right) \) denotes the saturation of actuator u.
Remark 1
Unlike the exiting performance functions [8, 16,17,18,19,20,21,22,23,24], the newly designed \(p_\text {lower}^e(t)\) and \(p_\text {upper}^e(t)\) contain the readjusting term \({p^e}(t) {=} \kappa _2^etanh\left( {\kappa _1^e{\text {abs}}\left( {u {-} {u_d}} \right) } \right) \) that is capable of adaptively regulating the prescribed funnels (i.e., decrease \(p_\text {lower}^e(t)\) and increase \(p_\text {upper}^e(t)\) when \(u - {u_d} \ne 0\)) according to the saturation \({\text {abs}}\left( {u - {u_d}} \right) \), being expected to avoid the singularity problem.
Remark 2
It is clearly concluded that \(p_\text {lower}^e(t)\) and \(p_\text {upper}^e(t)\) are bounded since \(p_\text {upper}^e(t) \in [p_0^e + \kappa _2^e,p_{T_{FT}^e}^e + \kappa _2^e]\) and \(p_\text {lower}^e(t) = - p_\text {upper}^e(t)\).
2.4 Control objective
Due to the nonlinearity of vehicle model, (1)-(5) can be rewritten as the following non-affine formulation [3, 5].
Velocity subsystem
Altitude subsystem
In (12) and (13), \([{x_V},x_h^h,x_h^\gamma ,x_h^\theta ,x_h^Q]{: =} [V,h,\gamma ,\theta ,Q]\) are system states. \(\iota _\Phi ^V > \frac{1}{2}\frac{{\partial f_\Phi ^V\left( {{x_V},\Phi } \right) }}{{\partial \Phi }}\), \(\iota _\gamma ^h > \frac{1}{2}\frac{{\partial f_\gamma ^h\left( {x_h^h,x_h^\gamma } \right) }}{{\partial x_h^\gamma }}\), \(\iota _\theta ^h > \frac{1}{2}\frac{{\partial f_\theta ^h\left( {x_h^h,x_h^\gamma ,x_h^\theta } \right) }}{{\partial x_h^\theta }}\), \(\iota _Q^h > \frac{1}{2}\frac{{\partial f_Q^h\left( {x_h^Q} \right) }}{{\partial x_h^Q}}\) and \(\iota _{{\delta _e}}^h > \frac{1}{2}\frac{{\partial f_{{\delta _e}}^h\left( {x_h^h,x_h^\gamma ,x_h^\theta ,x_h^Q,{\delta _e}} \right) }}{{\partial {\delta _e}}}\) are constants [3, 5]. \(F_\Phi ^V\left( {{x_V},\Phi } \right) = f_\Phi ^V\left( {{x_V},\Phi } \right) - \iota _\Phi ^V\Phi :\Re \times {\Re _{ > 0}} \rightarrow \Re \), \(F_\gamma ^h\left( {x_h^h,x_h^\gamma } \right) = f_\gamma ^h\left( {x_h^h,x_h^\gamma } \right) - \iota _\gamma ^hx_h^\gamma :{\Re ^2} \rightarrow \Re \), \(F_\theta ^h\left( {x_h^h,x_h^\gamma ,x_h^\theta } \right) = f_\theta ^h\left( {x_h^h,x_h^\gamma ,x_h^\theta } \right) - \iota _\theta ^hx_h^\theta :{\Re ^3} \rightarrow \Re \), \(F_Q^h\left( {x_h^Q} \right) = f_Q^h\left( {x_h^Q} \right) - \iota _Q^hx_h^Q:\Re \rightarrow \Re \), and \(F_{{\delta _e}}^h\left( {x_h^h,x_h^\gamma ,x_h^\theta ,x_h^Q,{\delta _e}} \right) = f_{{\delta _e}}^h\left( {x_h^h,x_h^\gamma ,x_h^\theta ,x_h^Q,{\delta _e}} \right) - \iota _{{\delta _e}}^h{\delta _e}:{\Re ^5} \rightarrow \Re \) are unknown but continuous functions. The control inputs \(\Phi \) and \({\delta _e}\) are constrained by
with \({\Phi _d}\) and \({\delta _e}_d\) being the ideal values of \(\Phi \in \left[ {{\Phi _{\min }},{\Phi _{\max }}} \right] \) and \({\delta _e} \in \left[ {{\delta _e}_{\min },{\delta _e}_{\max }} \right] \), where \({\Phi _{\max }}{\text {(}} \in {\Re _{> 0}}{\text {)}}> {\Phi _{\min }}{\text {(}} \in {\Re _{ > 0}}{\text {)}}\) and \({\delta _e}_{\max }{\text {(}} \in \Re {\text {)}} > {\delta _e}_{\min }{\text {(}} \in \Re {\text {)}}\) are constants.
Control Objective: Develop control laws for \(\Phi \) and \({\delta _e}\) under constraints (14) and (15) such that \({[{x_V},x_h^h,x_h^\gamma ,x_h^\theta ,x_h^Q]^T} \in {\Re ^5}\) track their reference commands \({[x_V^d,x_h^{h,d},x_h^{\gamma ,d},x_h^{\theta ,d},x_h^{Q,d}]^T} \in {\Re ^5}\), and furthermore the tracking errors \({[{e_V},e_h^h,e_h^\gamma ,e_h^\theta ,e_h^Q]^T} = [{x_V} - x_V^d,x_h^h - x_h^{h,d},x_h^\gamma - x_h^{\gamma ,d},x_h^\theta - x_h^{\theta ,d},x_h^Q - x_h^{Q,d}] \in {\Re ^5}\) satisfy the prescribed behavior (10), i.e., tracking errors converge to steady-sates in finite-time \(T_{FT}^e \in {\Re _{ > 0}}\) whose value can be set as needed, and moreover their steady-state values are within \(( - p_{T_{FT}^e}^e,p_{T_{FT}^e}^e)\).
Assumption 1
[16]. The reference commands \(x_V^d\), \(x_h^{h,d}\), \(x_h^{\gamma ,d}\), \(x_h^{\theta ,d}\), \(x_h^{Q,d}\) and their time derivatives are bounded.
3 Controller design
3.1 Velocity controller
In this subsection, we develop a constrained controller \(\Phi \in [{\Phi _{\min }},{\Phi _{\max }}]\) to let \({x_V} \rightarrow x_V^d\) in finite-time with readjusting prescribed performance.
The velocity tracking error \({e_V}\) should satisfy the following readjusting prescribed performance
with performance functions \(p_\text {lower}^{{e_V}}\left( t \right) = - p_\text {upper}^{{e_V}}\left( t \right) \) and
where \(p_0^{{e_V}}\left( { \in {\Re _{> 0}}} \right)> p_{T_{FT}^{{e_V}}}^{{e_V}}\left( { \in {\Re _{ > 0}}} \right) \) and \({l_{{e_V}}} \in {\Re _{ > 0}}\) are design parameters, and \(T_{FT}^{{e_V}} \in {\Re _{ > 0}}\) means the convergence time. \(p_\Phi ^{{e_V}}\left( t \right) = \kappa _{\Phi ,2}^{{e_V}}tanh\left( {\kappa _{\Phi ,1}^{{e_V}}{\text {abs}}\left( {\Phi {-} {\Phi _d}} \right) } \right) \) is the readjusting term that correspondingly adjusts the funnels of \(p_\text {lower}^{{e_V}}\left( t \right) \) and \(p_\text {upper}^{{e_V}}\left( t \right) \) to avoid the singularity problem caused by actuator saturation. \(\kappa _{\Phi ,1}^{{e_V}} \in {\Re _{ > 0}}\) and \(\kappa _{\Phi ,2}^{{e_V}} \in {\Re _{ > 0}}\) are two design parameters.
(16) is equivalently expressed as
with \(S_\varepsilon ^{{e_V}}\left( {\varepsilon _V^{{e_V}}(t)} \right) = \frac{{\varepsilon _V^{{e_V}}(t)}}{{1 + \varepsilon _V^{{e_V}}(t)}}:\Re \rightarrow \left( {0,1} \right) \). The transformed error \(\varepsilon _V^{{e_V}}(t):{\Re _{ \ge 0}} \rightarrow \Re \) is derived from (18) as
To cope with the actuator saturation, a compensated system is devised as
with \(d_\varepsilon ^V = \frac{{p_\text {upper}^{{e_V}}(t) - p_\text {lower}^{{e_V}}(t)}}{{\left( {p_\text {upper}^{{e_V}}(t) - {e_V}} \right) \left( {{e_V} - p_\text {lower}^{{e_V}}(t)} \right) }} > 0\), \({s_V} \in \Re \), and \({k_{{s_V}}} \in {\Re _{ > 0}}\) .
The system state of (2) (i.e., \({s_V} \in \Re \)) is used to modify \(\varepsilon _V^{{e_V}}(t)\).
By employing (12), (18) and (20), the time derivative dynamics of (21) is given by
with
where \(\sum _V^{p,\dot{p}}\) is bounded since its arguments are bounded.
The velocity controller is chosen as
with \(k_V^{{\Phi _d}} \in {\Re _{ > 0}}\).
Substituting (23) into (22) and invoking (18), it leads to
with
Due to the boundedness of arguments, the continuous function \(\sum _V^{All}\) also is bounded, denoted by \({\text {abs}}\left( {\sum _V^{All}} \right) \le \bar{\sum }_V^{All}\) with \(\bar{\sum }_V^{All} \in {\Re _{ > 0}}\).
Define Lyapunov function
Taking time derivative along (25) and employing (24), we get
If \({\text {abs}}\left( {z_V^{{e_V}}} \right) > \bar{\sum }_V^{All}/k_V^{{\Phi _d}}\), we have \(\dot{W}_V^{{e_V}} < 0\) and further obtain \({\text {abs}}\left( {z_V^{{e_V}}} \right) \le \min \left\{ {{\text {abs}}\left( {z_V^{{e_V}}\left( 0 \right) } \right) ,\frac{{\bar{\sum }_V^{All}}}{{k_V^{{\Phi _d}}}}} \right\} \). Thereby, the boundedness of \({\Phi _d}\) is guaranteed, and \(\Phi - {\Phi _d}\) also is bounded. The Lyapunov function is chosen as \({W_{{s_V}}} = \frac{1}{2}s_V^2\). Then, by utilizing (20), we know
When \({k_{{s_V}}}\frac{\pi }{2}> {k_{{s_V}}}{\text {abs}}\left( {\arctan \left( {{s_V}} \right) } \right) {>} \iota _\Phi ^V{\text {abs}}\left( {\Phi {-} {\Phi _d}} \right) \), i.e., \({k_{{s_V}}} > \frac{{2\iota _\Phi ^V}}{\pi }{\text {abs}}\left( {\Phi - {\Phi _d}} \right) \), we have \({\dot{W}_{{s_V}}} < 0\). Thus, \(s_{V}\) is bounded. Noting that \(z_V^{{e_V}} = \varepsilon _V^{{e_V}}(t) - {s_V}\), we conclude that the transformed error \(\varepsilon _V^{{e_V}}(t)\) also is bounded. We choose the upper bound of \(\varepsilon _V^{{e_V}}(t)\) as \(\bar{\varepsilon }_V^{{e_V}} \in {\Re _{ > 0}}\). On the basis of Theorem 1 presented in [16], it is derived from (19) that \(\frac{{{e_V} - p_\text {lower}^{{e_V}}(t)}}{{p_\text {upper}^{{e_V}}(t) - p_\text {lower}^{{e_V}}(t)}}{\text { = }}\frac{{\exp \left( {\varepsilon _V^{{e_V}}(t)} \right) }}{{1{\text { + }}\exp \left( {\varepsilon _V^{{e_V}}(t)} \right) }}\) and \(0< \frac{{\exp \left( { - \bar{\varepsilon }_V^{{e_V}}} \right) }}{{1{\text { + }}\exp \left( { - \bar{\varepsilon }_V^{{e_V}}} \right) }} \le \frac{{\exp \left( {\varepsilon _V^{{e_V}}(t)} \right) }}{{1{\text { + }}\exp \left( {\varepsilon _V^{{e_V}}(t)} \right) }} \le \frac{{\exp \left( {\bar{\varepsilon }_V^{{e_V}}} \right) }}{{1{\text { + }}\exp \left( {\bar{\varepsilon }_V^{{e_V}}} \right) }} < 1\). Finally, we obtain \(p_\text {lower}^{{e_V}}(t)< {e_V} < p_\text {upper}^{{e_V}}(t)\). Thereby, the spurred prescribed performance can be guaranteed.
3.2 Altitude controller
In this subsection, we will exploit a constrained controller \({\delta _e} \in [{\delta _e}_{\min },{\delta _e}_{\max }]\) to let \(x_h^h \rightarrow x_h^{h,d},x_h^\gamma \rightarrow x_h^{\gamma ,d},x_h^\theta \rightarrow x_h^{\theta ,d}\) and \(x_h^Q \rightarrow x_h^{Q,d}\) in finite-time with readjusting prescribed performance being guaranteed for \(e_h^h,e_h^\gamma ,e_h^\theta \) and \(e_h^Q\), where \(x_h^{\gamma ,d},x_h^{\theta ,d}\) and \(x_h^{Q,d}\) are virtual controllers devised using back-stepping, while their time derivatives aren’t required for feedback control, effectively avoiding the problem of “explosion of terms”.
The tracking errors \(e_h^i = x_h^i - x_h^{i,d},i = h,\gamma ,\theta ,Q\) should satisfy the following readjusting prescribed performance
with \(p_\text {lower}^{e,i}\left( t \right) = - p_{upper}^{e,i}\left( t \right) \) and
where \(p_0^{e,i}\left( { \in {\Re _{> 0}}} \right)> p_{T_{FT}^{e,i}}^{e,i}\left( { \in {\Re _{ > 0}}} \right) \) and \({l_{e,i}} \in {\Re _{ > 0}}\) are design parameters with \(i = h,\gamma ,\theta ,Q\), and \(T_{FT}^{e_h^i} \in {\Re _{ > 0}}(i = h,\gamma ,\theta ,Q)\) are convergence times. \(p_{{\delta _e}}^{e,i}\left( t \right) = \kappa _{{\delta _e},2}^{e,i}tanh\left( {\kappa _{{\delta _e},1}^{e,i}{\text {abs}}\left( {{\delta _e} - {\delta _e}_d} \right) } \right) ,i = h,\gamma ,\theta ,Q\) are readjusting terms with \(\kappa _{{\delta _e},1}^{e,i} \in {\Re _{ > 0}}(i = h,\gamma ,\theta ,Q)\) and \(\kappa _{{\delta _e},2}^{e,i} \in {\Re _{ > 0}}(i = h,\gamma ,\theta ,Q)\).
(28) is equivalently expressed as
with \(\varepsilon _h^{e,i} \in \Re \) and \(S_h^{e,i}\left( {\varepsilon _h^{e,i}} \right) = \frac{{{e^{\varepsilon _h^{e,i}}}}}{{1 + {e^{\varepsilon _h^{e,i}}}}}:\Re \rightarrow \left( {0,1} \right) \), where \(i = h,\gamma ,\theta ,Q.\)
From (30), we further get the formulation of transformed errors \(\varepsilon _h^{e,i} \in \Re ,i = h,\gamma ,\theta ,Q\)
Invoking (13) and (30), \(\dot{\varepsilon }_h^{e,i},i = h,\gamma ,\theta ,Q\) are given by
with
Due to the boundedness of arguments, \(\sum _{h,i}^{p,\dot{p}},i = h,\gamma ,\theta ,Q\) also are bounded. Based on the back-stepping procedure, we design the following virtual control laws
with \(k_h^i \in {\Re _{ > 0}},i = h,\gamma ,\theta \).
Substituting (33) into (32) and using (30), we obtain
with
We easily conclude that \(\sum _{h,i}^{All},i = h,\gamma ,\theta \) are bounded since their arguments are bounded, that is, there exist constants \(\bar{\sum }_{h,i}^{All} \in {\Re _{ > 0}},i = h,\gamma ,\theta \) such that \({\text {abs}}\left( {\sum _{h,i}^{All}} \right) \le \bar{\sum }_{h,i}^{All},i = h,\gamma ,\theta \).
Define Lyapunov function
Taking time derivative of (35) and utilizing (34), we know
Once \(abs\left( {\varepsilon _h^{e,i}} \right) > {{\bar{\sum }_{h,i}^{All}} \big / {k_h^i}},i = h,\gamma ,\theta \), we have \(\dot{W}_h^{\varepsilon ,e,i} < 0,i = h,\gamma ,\theta \). Thereby, we conclude that \(abs\left( {\varepsilon _h^{e,i}} \right) \le \min \left\{ {{{abs\left( {\varepsilon _h^{e,i}(0)} \right) ,\bar{\sum }_{h,i}^{All}} \big / {k_h^i}}} \right\} ,i = h,\gamma ,\theta .\)
It is difficult to guarantee the stability of altitude subsystem under the saturation condition. Thus, we develop the following compensated system.
where \({k_{{s_h}}} \in {\Re _{ > 0}}\) is a design parameter, and the state \({s_h} \in \Re \) is used to modify \(\varepsilon _h^{e,Q}\)
Combining (32) and (37), the time derivative of \(z_h^{e,Q}\) is given by
The altitude controller is developed as
with \(k_h^{{\delta _e}} \in {\Re _{ > 0}}\).
Substituting (40) into (39) leads to
where \(\Sigma _{{\delta _e}}^{All,h}: = F_{{\delta _e}}^h - \dot{x}_h^{Q,d} + \sum _{h,Q}^{p,\dot{p}}\) is bounded since \(\dot{x}_h^{Q,d} = - \frac{{k_h^Q}}{{\iota _{x_h^Q}^h}}\dot{\varepsilon }_h^{e,Q} = - \frac{{k_h^Q}}{{\iota _{x_h^Q}^h}}\left( {F_{{\delta _e}}^h - \dot{x}_h^{Q,d} + \sum _{h,Q}^{p,\dot{p}}} \right) \) is bounded, that is, there is a constant \(\bar{\Sigma }_{{\delta _e}}^{All,h} \in {\Re _{ > 0}}\) such that \({\text {abs}}\left( {\Sigma _{{\delta _e}}^{All,h}} \right) \le \bar{\Sigma }_{{\delta _e}}^{All,h}\).
Define Lyapunov function
Taking time derivative along (42) and employing (41), we obtain
It can be seen that \(\dot{W}_h^{\varepsilon ,e,Q}\) will be negative if \(abs\left( {z_h^{e,Q}} \right) > {{\bar{\Sigma }_{{\delta _e}}^{All,h}} \big / {k_h^{{\delta _e}}}}\). Thus, we know that \(abs\left( {z_h^{e,Q}} \right) \le \min \left\{ {{{abs\left( {z_h^{e,Q}(0)} \right) ,\bar{\Sigma }_{{\delta _e}}^{All,h}} \big / {k_h^{{\delta _e}}}}} \right\} \), which further guarantees the boundedness of \({\text {abs}}\left( {{\delta _e} - {\delta _e}_d} \right) \). By defining the Lyapunov function \({W_{{s_h}}} = \frac{1}{2}s_h^2\) and utilizing (37), we have
Let \({k_{{s_h}}}\frac{\pi }{2}> {k_{{s_h}}}{\text {abs}}\left( {\arctan \left( {{s_h}} \right) } \right) > \iota _{{\delta _e}}^h{\text {abs}}\left( {{\delta _e} - {\delta _e}_d} \right) \) (i.e., \({k_{{s_h}}} > {{2\iota _{{\delta _e}}^h{\text {abs}}\left( {{\delta _e} - {\delta _e}_d} \right) } \big / \pi }\)). We obtain \({\dot{W}_{{s_h}}} < 0\). It is further concluded that \({s_h}\) and \(z_h^{e,Q}\left( {: = \varepsilon _h^{e,Q} - {s_h}} \right) \) are bounded.
The above discussions prove the boundedness of \(\varepsilon _h^{e,i},i = h,\gamma ,\theta ,Q\), given by \({\text {abs}}\left( {\varepsilon _h^{e,i}} \right) \le \bar{\varepsilon }_h^{e,i} \in {\Re _{ > 0}},i = h,\gamma ,\theta ,Q\). Based on Theorem 1 of [16], we conclude from (31) that \(\frac{{e_h^i - p_{lower}^{e,i}(t)}}{{p_{upper}^{e,i}(t) - p_{lower}^{e,i}(t))}}{\text { = }}\frac{{\exp \left( {\varepsilon _h^{e,i}} \right) }}{{1{\text { + }}\exp \left( {\varepsilon _h^{e,i}} \right) }},i = h,\gamma ,\theta ,Q\) and \(0< \frac{{\exp \left( { - \bar{\varepsilon }_h^{e,i}} \right) }}{{1{\text { + }}\exp \left( { - \bar{\varepsilon }_h^{e,i}} \right) }} \le \frac{{\exp \left( {\varepsilon _h^{e,i}} \right) }}{{1{\text { + }}\exp \left( {\varepsilon _h^{e,i}} \right) }} \le \frac{{\exp \left( {\bar{\varepsilon }_h^{e,i}} \right) }}{{1{\text { + }}\exp \left( {\bar{\varepsilon }_h^{e,i}} \right) }} < 1,i = h,\gamma ,\theta ,Q\),. Finally, we obtain \(p_{lower}^{e,i}(t)< e_h^i < p_{upper}^{e,i}(t),i = h,\gamma ,\theta ,Q\). Thereby, the spurred prescribed performance can be guaranteed for \(e_h^i,i = h,\gamma ,\theta ,Q\).
Remark 3
Controllers (33) and (40), developed utilizing back-stepping, don’t contain the time derivatives of virtual control laws, which eliminates the problem of “explosion of terms”. Moreover, there is no need of any fuzzy/neural approximation for (33) and (40). Hence, the problem of computational complexity is avoided.
Remark 4
From [5, 16], we know that \(\iota _\Phi ^V\), \(\iota _\gamma ^h\), \(\iota _\theta ^h\), \(\iota _Q^h\) and \(\iota _{{\delta _e}}^h\) satisfy: \(\iota _\Phi ^V > \frac{1}{2}\frac{{\partial f_\Phi ^V\left( {{x_V},\Phi } \right) }}{{\partial \Phi }}\), \(\iota _\gamma ^h > \frac{1}{2}\frac{{\partial f_\gamma ^h\left( {x_h^h,x_h^\gamma } \right) }}{{\partial x_h^\gamma }}\), \(\iota _\theta ^h > \frac{1}{2}\frac{{\partial f_\theta ^h\left( {x_h^h,x_h^\gamma ,x_h^\theta } \right) }}{{\partial x_h^\theta }}\), \(\iota _Q^h > \frac{1}{2}\frac{{\partial f_Q^h\left( {x_h^Q} \right) }}{{\partial x_h^Q}}\) and \(\iota _{{\delta _e}}^h > \frac{1}{2}\frac{{\partial f_{{\delta _e}}^h\left( {x_h^h,x_h^\gamma ,x_h^\theta ,x_h^Q,{\delta _e}} \right) }}{{\partial {\delta _e}}}\). In the simulation, we can select suitable constants for \(\iota _\Phi ^V\), \(\iota _\gamma ^h\), \(\iota _\theta ^h\), \(\iota _Q^h\) and \(\iota _{{\delta _e}}^h\). \(p_0^{{e_V}} \in {\Re _{ > 0}}\) denotes the initial value of the performance function, and its value can be chosen as a constant that satisfies \(p_0^{{e_V}} > {\text {abs}}\left( {{e_V}(0)} \right) \). \(p_{T_{FT}^{{e_V}}}^{{e_V}} \in {\Re _{ > 0}}\) means the upper bound of \({e_V}\), and its value should be suitably designed according to the desired control accuracy. \(T_{FT}^{{e_V}} \in {\Re _{ > 0}}\) and \({l_{{e_V}}} \in {\Re _{ > 0}}\) should be set as suitable values according to the desired convergence time and rate of \({e_V}\). \(\kappa _{\Phi ,2}^{{e_V}} \in {\Re _{ > 0}}\) and \(\kappa _{\Phi ,1}^{{e_V}} \in {\Re _{ > 0}}\) mainly affect the amplitude and rate of the readjusting term \(p_\Phi ^{{e_V}}\left( t \right) \). Similarly, \(\kappa _{{\delta _e},2}^{e,i}\), \(i = h,\gamma ,\theta ,Q\) and \(\kappa _{{\delta _e},1}^{e,i},i = h,\gamma ,\theta ,Q\) mainly affect the amplitudes and rates of readjusting terms \(p_{{\delta _e}}^{e,i}\left( t \right) ,i = h,\gamma ,\theta ,Q\). The value of \({k_{{s_V}}}\) should be designed based on the response of \({s_V}\), and it should satisfy \({k_{{s_V}}} > \frac{{2\iota _\Phi ^V}}{\pi }{\text {abs}}\left( {\Phi - {\Phi _d}} \right) \). \(k_V^{{\Phi _d}} \in {\Re _{ > 0}}\) should be set as a suitable value according to the response of \(z_V^{{e_V}}\). \(p_0^{e,i} \in {\Re _{ > 0}},i = h,\gamma ,\theta ,Q\) mean the initial values of the performance functions, and their values can be chosen as constants satisfying \(p_0^{e,i} > {\text {abs}}\left( {e_h^i(0)} \right) ,i = h,\gamma ,\theta ,Q\). \(p_{T_{FT}^{e,i}}^{e,i} \in {\Re _{ > 0}},i = h,\gamma ,\theta ,Q\) denote the upper bounds of \(e_h^i,i = h,\gamma ,\theta ,Q\), and their values should be suitably designed based on the desired control accuracy. \(T_{FT}^{e_h^i},i = h,\gamma ,\theta ,Q\) and \({l_{e,i}} \in {\Re _{ > 0}},i = h,\gamma ,\theta ,Q\) should be set as suitable values according to the desired convergence times and rates of \(e_h^i,i = h,\gamma ,\theta ,Q\). The values of \(k_h^i \in {\Re _{ > 0}},i = h,\gamma ,\theta \) and \(k_h^{{\delta _e}} \in {\Re _{ > 0}}\) should be chosen according to the responses of \(\varepsilon _h^{e,h},\varepsilon _h^{e,\gamma }\varepsilon _h^{e,\theta }\) and \(z_h^{e,Q}\). \({k_{{s_h}}}\) should be set as a suitable value based on the response of \({s_h} \in \Re \), and it should satisfy \({k_{{s_h}}} > 2\iota _{{\delta _e}}^h{\text {abs}}\left( {{\delta _e} - {\delta _e}_d} \right) /\pi \).




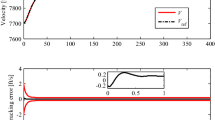
Velocity tracking performance of the proposed method

Altitude tracking performance of the proposed method

Velocity tracking error of the proposed method

Altitude tracking error of the proposed method

Flight-path angle tracking error of the proposed method

Pitch angle tracking error of the proposed method

Pitch rate tracking error of the proposed method

Velocity control input of the proposed method

Altitude control input of the proposed method

Compensated systems’ states of the proposed method

Transformed errors of the proposed method
4 Simulation results
The purpose of this section is to validate the effect of the proposed method via compared simulation. The addressed controllers (23), (33), and (40) with compensated systems (20) and (37) are tested in the MATLAB/Simulink environment by utilizing the fourth-order Runge–Kutta algorithm with a fixed-step of 0.01 s. Based on the discussions presented in Remark 3 and the actual simulation performance, we choose the following values for the design parameters: \(\iota _\Phi ^V = 1.3\), \(\iota _\gamma ^h = 1.3\), \(\iota _\theta ^h = 1.3\), \(\iota _Q^h = 1.3\), \(\iota _{{\delta _e}}^h = 1.3\), \(p_0^{{e_V}} = 6\), \(p_{T_{FT}^{{e_V}}}^{{e_V}} = 2\), \({l_{{e_V}}} = 3\), \(T_{FT}^{{e_V}} = 6\), \(\kappa _{\Phi ,1}^{{e_V}} = 1.5\), \(\kappa _{\Phi ,2}^{{e_V}} = 20\), \({k_{{s_V}}} = 1.5\), \(k_V^{{\Phi _d}} = 0.6\), \(p_0^{e,h} = 1.6\), \(p_{T_{FT}^{e,h}}^{e,h} = 0.4\), \({l_{e,h}} = 3\), \(T_{FT}^{e_h^h} = 8\), \(p_0^{e,\gamma } = 0.08\), \(p_{T_{FT}^{e,\gamma }}^{e,\gamma } = 0.017\), \({l_{e,\gamma }} = 3\), \(T_{FT}^{e_h^\gamma } = 8\), \(p_0^{e,\theta } = 0.12\), \(p_{T_{FT}^{e,\theta }}^{e,\theta } = 0.025\), \({l_{e,\theta }} = 3\), \(T_{FT}^{e_h^\theta } = 8\), \(p_0^{e,Q} = 0.3\), \(p_{T_{FT}^{e,Q}}^{e,Q} = 0.05\), \({l_{e,Q}} = 3\), \(T_{FT}^{e_h^Q} = 8\), \(\kappa _{{\delta _e},1}^{e,h} = 1.2\), \(\kappa _{{\delta _e},2}^{e,i} = 0.5(i = h,\gamma ,\theta ,Q)\), \(\kappa _{{\delta _e},1}^{e,i} = 1.2\pi /180(i = \gamma ,\theta ,Q)\), \(k_h^h = 0.05\), \(k_h^\gamma = 0.06\), \(k_h^\theta = 0.13\), \(k_h^Q = 0.9\), and \({k_{{s_h}}} = 0.5\). We assume that the control inputs are constrained by: \(\Phi \in [0.05,0.95]\) and \({\delta _e} \in [ - 20{\text { }}\deg ,20{\text { }}\deg ]\). The proposed readjusting prescribed performance controller is compared with the traditional PPC [17,18,19]. Moreover, to test the robust performance, we consider parameter uncertainty up to 45
where C denotes the value of uncertain coefficient and \({C_0}\) means the nominal value of C.
The obtained simulation results are depicted in Figs. 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 and 16. Figures 3, 4, and 5 clearly infer that the traditional PPC [17,18,19] exhibits fragility to the actuator saturation. If the actuator is saturated (See Fig. 3), the tracking error \({e_V}\) increases gradually so that \({e_V}\) reaches the traditional prescribed funnel [17,18,19] (See Fig. 4). As a result, the transformed errors tend to diverge (See Fig. 5). Thereby, as to the traditional PPC [17,18,19], the actuator saturation will result in the singular problem. As a contrast, the proposed method can effectively guarantee tracking errors with desired prescribed performance in the presence of actuator saturation, as shown in Figs. 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 and 16. The velocity tracking performance and the altitude tracking performance are presented in Figs. 6 and 7. Figs. 8, 9, 10, 11, 12, 13 and 14 indicate that the addressed method is capable of adaptively readjusting the prescribed funnels (See Figs. 8, 9, 10, 11 and 12) when actuators are saturated (See Figs. 13 and 14), while avoiding the fragile problem associated with traditional PPC [17,18,19]. Besides, the developed compensated system can provide timely compensations when actuators are saturated (See Fig. 15). Finally, Fig 16 shows the boundedness of transformed errors.
5 Conclusions
The non-fragile tracking control methodology is exploited for WVs subject to actuator saturation. A new type of PPC with readjusting prescribed performance is proposed to handle the fragile problem. Moreover, the improved back-stepping is used to devised velocity controller and altitude controller, while the problem of “explosion of terms” is avoided. Besides, compensated systems are developed to provide effective compensations for actuator saturations. Finally, the presented simulation results prove the effectiveness and superiority of the proposed design. In our future work, we will try to handle the actuator saturation utilizing the Bessel function.
Data availibility
The experimental data used to support the findings of this study are available from the corresponding author upon request.
References
An, H., Wu, Q., Wang, G., Guo, Z., Wang, C.: Simplified longitudinal control of air-breathing hypersonic vehicles with hybrid actuators. Aerosp. Sci. Technol. 104, 105936 (2020)
Shou, Y., Xu, B., Liang, X., Yang, D.: Aerodynamic/reaction-jet compound control of hypersonic reentry vehicle using sliding mode control and neural learning. Aerosp. Sci. Technol. 111, 106564 (2021)
Bu, X., Jiang, B., Lei, H.: Non-fragile quantitative prescribed performance control of Waverider vehicles with actuator saturation. IEEE Trans. Aerosp. Electron. Syst. (2022). https://doi.org/10.1109/TAES.2022.3153429
Xu, B., Shou, Y., Luo, J., Pu, H., Shi, Z.: Neural learning control of strict-feedback systems using disturbance observer. IEEE Trans. Neural Netw. Learn. Syst. 30, 1296–1307 (2019)
Bu, X., Qi, Q.: Fuzzy optimal tracking control of hypersonic flight vehicles via single-network adaptive critic design. IEEE Trans. Fuzzy Syst. 30, 270–278 (2022)
Tao, X., Yi, J., Pu, Z., Xiong, T.: Robust adaptive tracking control for hypersonic vehicle based on interval type-2 fuzzy logic system and small-gain approach. IEEE Trans. Cybern. 51(5), 2504–2517 (2021)
Bu, X.: Air-breathing hypersonic vehicles funnel control using neural approximation of non-affine dynamics. IEEE/ASME Trans. Mechatron. 23(5), 2099–2108 (2018)
Sun, W., Su, S., Wu, Y., Xia, J.: Adaptive fuzzy event-triggered control for high-order nonlinear systems with prescribed performance. IEEE Trans. Cybern. (2020). https://doi.org/10.1109/TCYB.2020.3025829
Guo, Z., Ma, Q., Guo, J., Zhao, B., Zhou, J.: Performance-involved coupling effect-triggered scheme for robust attitude control of HRV. IEEE/ASME Trans. Mechatron. 25(3), 1288–1298 (2020)
Zhao, D., Jiang, B., Yang, H.: Backstepping-based decentralized fault-tolerant control of hypersonic vehicles in PDE-ODE form. IEEE Trans. Autom. Control (2021). https://doi.org/10.1109/TAC.2021.3059689
Bu, X., He, G., Wang, K.: Tracking control of air-breathing hypersonic vehicles with non-affine dynamics via improved neural back-stepping design. ISA Trans. 75, 88–100 (2018)
Sun, J., Yi, J., Pu, Z., Liu, Z.: Adaptive fuzzy nonsmooth backstepping output-feedback control for hypersonic vehicles with finite-time convergence. IEEE Trans. Fuzzy Syst. 28(10), 2320–2334 (2020)
Shao, X., Shi, Y., Zhang, W.: Fault-tolerant quantized control for flexible air-breathing hypersonic vehicles with appointed-time tracking performances. IEEE Trans. Aerosp. Electron. Syst. 57(2), 1261–1273 (2021)
Li, Y., Liang, S., Xu, B., Hou, M.: Predefined-time asymptotic tracking control for hypersonic flight vehicles with input quantization and faults. IEEE Trans. Aerosp. Electron. Syst. (2021). https://doi.org/10.1109/TAES.2021.3068442
Bu, X., Xiao, Y., Lei, H.: An adaptive critic design-based fuzzy neural controller for hypersonic vehicles: predefined behavioral nonaffine control. IEEE/ASME Trans. Mechatron. 24(4), 1871–1881 (2019)
Bu, X., Qi, Q., Jiang, B.: A simplified finite-time fuzzy neural controller with prescribed performance applied to waverider aircraft. IEEE Trans. Fuzzy Syst. (2021). https://doi.org/10.1109/TFUZZ.2021.3089031
Bechlioulis, C., Rovithakis, G.: Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Automat. Contr. 53(9), 2090–2099 (2008)
Bechlioulis, C., Rovithakis, G.: A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 50, 1217–1226 (2014)
Luo, J., Yin, Z., Wei, C., Yuan, J.: Low-complexity prescribed performance control for spacecraft attitude stabilization and tracking. Aerosp. Sci. Technol. 74, 173–183 (2018)
Zhou, Z., Zhang, Y., Zhou, D.: Robust prescribed performance tracking control for free-floating space manipulators with kinematic and dynamic uncertainty. Aerosp. Sci. Technol. 71, 568–579 (2017)
Lu, Y., Huang, P., Meng, Z.: Adaptive prescribed performance control for the post-capture tethered combination via dynamic surface technique. Aerosp. Sci. Technol. 94, 105366 (2019)
Liu, J., An, H., Gao, Y., Wang, C., Wu, L.: Adaptive control of hypersonic flight vehicles with limited angle-of-attack. IEEE/ASME Trans. Mechatron. 23(2), 883–894 (2018)
Shi, Y., Shao, X., Zhang, W.: Quantized learning control for flexible air-breathing hypersonic vehicle with limited actuator bandwidth and prescribed performance. Aerosp. Sci. Technol. 97, 105629 (2020)
Yang, Q., Chen, M.: Adaptive neural prescribed performance tracking control for near space vehicles with input nonlinearity. Neurocomputing 174, 780–789 (2016)
Parker, J., Serrani, A., Yurkovich, S., Bolender, M., Doman, D.: Control-oriented modeling of an air-breathing hypersonic vehicle. J. Guid. Control. Dyn. 30, 856–869 (2007)
Yang, Y., Tan, J., Yue, D.: Prescribed performance control of one-DOF link manipulator with uncertainties and input saturation constraint. IEEE/CAA J. Autom. Sin. 6(1), 148–157 (2019)
Funding
This work was supported by Young Talent Support Project for Science and Technology (Grant No. 18-JCJQ-QT-007).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Nomenclature
Appendix: Nomenclature
- m :
-
vehicle mass
- \(\bar{\rho }\) :
-
density of air
- \(\bar{q}\) :
-
dynamic pressure
- S :
-
reference area
- h :
-
altitude
- V :
-
velocity
- \(\gamma \) :
-
flight-path angle
- \(\theta \) :
-
pitch angle
- \(\alpha \) :
-
angle of attack (\(\alpha =\theta -\gamma \))
- Q :
-
pitch rate
- T :
-
thrust
- D :
-
drag
- L :
-
lift
- M :
-
pitching moment
- \({I_{{\text {yy}}}}\) :
-
moment of inertia
- \(\bar{c}\) :
-
aerodynamic chord
- \({z_T}\) :
-
thrust moment arm
- \(\Phi \) :
-
fuel equivalence ratio
- \({\delta _e}\) :
-
elevator angular deflection
- \({N_i}\) :
-
ith generalized force
- \(N_i^{{\alpha _j}}\) :
-
jth-order contribution of \(\alpha \) to \({N_i}\)
- \(N_i^0\) :
-
constant term in \({N_i}\)
- \(N_2^{{\delta _{\text {e}}}}\) :
-
contribution of \({\delta _e}\) to \({N_2}\)
- \({\beta _i}\left( {h,\bar{q}} \right) \) :
-
ith trust fit parameter
- \({\eta _i}\) :
-
ith generalized elastic coordinate
- \({\zeta _i}\) :
-
damping ratio for elastic mode \({\eta _i}\)
- \({\omega _i}\) :
-
natural frequency for elastic mode \({\eta _i}\)
- \(C_D^{{\alpha ^i}}\) :
-
ith-order coefficient of \(\alpha \) in D
- \(C_D^{\delta _{\text {e}}^i}\) :
-
ith-order coefficient of \({\delta _e}\) in D
- \(C_D^0\) :
-
constant coefficient in D
- \(C_L^{{\alpha ^i}}\) :
-
ith-order coefficient of \(\alpha \) in L
- \(C_L^{{\delta _{\text {e}}}}\) :
-
coefficient of \({\delta _e}\) contribution in L
- \(C_L^0\) :
-
constant coefficient in L
- \(C_{M,\alpha }^{{\alpha ^i}}\) :
-
ith-order coefficient of \(\alpha \) in M
- \(C_{M,\alpha }^0\) :
-
constant coefficient in M
- \(C_T^{{\alpha ^i}}\) :
-
ith-order coefficient of \(\alpha \) in T
- \(C_T^0\) :
-
constant coefficient in T
- \({h_0}\) :
-
nominal altitude for air density approximation
- \({\bar{\rho }_0}\) :
-
air density at the altitude \({h_0}\)
- \({\tilde{\psi }_i}\) :
-
constrained beam coupling constant for \({\eta _i}\)
- \({c_{\text {e}}}\) :
-
coefficient of \({\delta _{\text {e}}}\) in M
- \(1/{h_{\text {s}}}\) :
-
air density decay rate
- \({\Re _{ > 0}}\) :
-
the set of all real-positive numbers
- \(\Re \) :
-
the set of all real numbers
- \({\Re _{ \ge 0}}\) :
-
\({\Re _{ > 0}} \cup \{ 0\} \)
- \(: = \) :
-
define as
- \( \in \) :
-
belong to
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bu, X., Jiang, B. & Feng, Y. Non-fragile tracking control of constrained Waverider Vehicles with readjusting prescribed performance. Nonlinear Dyn 108, 3657–3669 (2022). https://doi.org/10.1007/s11071-022-07430-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07430-6