
Abstract
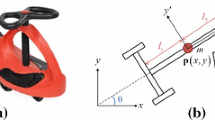
The Twistcar vehicle is a classic example of a nonholonomic dynamical system. The vehicle model consists of two rigid links connected by an actuated rotary joint and supported by wheeled axles, where nonholonomic constraints are assumed to impose no skidding of the wheels. Recent experimental measurements conducted with a robotic Twistcar prototype have shown disagreements with previous theoretical analyses. In particular, significant skidding has been observed, in addition to discrepancies with respect to theoretical predictions of divergence in oscillations of the vehicle’s speed and orientation, as well as direction reversal depending on the vehicle’s structure. The goal of our research is to resolve this disagreement by generalizing the theoretical analysis. First, we extend previous asymptotic analysis by incorporating the effects of links’ inertia and oscillation amplitude of the input angle on the direction of net motion. Next, we formulate the vehicle’s hybrid dynamics under frictional bounds and skid-state transitions. Using numerical analysis, we obtain optimal values for the vehicle’s mean speed and energetic cost-of-transport as a function of the input frequency. Our results improve the agreement between theory and experiments and suggest directions for further experimental investigation.









Similar content being viewed by others

Availability of data and material
Not applicable.
References
Bloch, A., Baillieul, J., Crouch, P., Marsden, J. E., Zenkov, D., Krishnaprasad, P.S., Murray, R.M.: Nonholonomic mechanics and control. Springer, vol 24 (2003)
Neimark, J.I., Fufaev, N.A.: Dynamics of nonholonomic systems, vol. 33. American Mathematical Soc., USA (2004)
Chaplygin, S.: Collected works. vol. 3. the theory of the motion of non-holonomic systems: examples of the use of the reducing factor method, (1950)
Stanchenko, S.: Non-holonomic Chaplygin systems. J. Appl. Math. Mech. 53(1), 11–17 (1989)
Macharet, D.G., Neto, A.A., da Camara Neto, V.F., Campos, M.F.: Nonholonomic path planning optimization for Dubins’ vehicles, In: 2011 IEEE International Conference on Robotics and Automation. IEEE, pp. 4208–4213 (2011)
Shammas, E.A., Choset, H., Rizzi, A.A.: Geometric motion planning analysis for two classes of underactuated mechanical systems. Int. J. Robot. Res. 26(10), 1043–1073 (2007)
Tilbury, D., Murray, R.M., Sastry, S.S.: Trajectory generation for the N-trailer problem using Goursat normal form. IEEE Trans. Automat. Control 40(5), 802–819 (1995)
Nakamura, Y., Ezaki, H., Tan, Y., Chung, W.: Design of steering mechanism and control of nonholonomic trailer systems. IEEE Trans. Robot. Automat. 17(3), 367–374 (2001)
Bloch, A.M., Krishnaprasad, P., Marsden, J.E., Murray, R.M.: Nonholonomic mechanical systems with symmetry. Archive for Ration. Mech. Anal. 136(1), 21–99 (1996)
Ostrowski, J., Lewis, A., Murray, R., Burdick, J.: Nonholonomic mechanics and locomotion: the snakeboard example, In: Robotics and Automation, 1994. Proceedings., 1994 IEEE International Conference on. IEEE, pp. 2391–2397 (1994)
Krishnaprasad, P., Tsakiris, D.P.: Oscillations, SE(2)-snakes and motion control: a study of the roller racer. Dynam. Syst.: An Int. J. 16(4), 347–397 (2001)
Bullo, F., Žefran, M.: On mechanical control systems with nonholonomic constraints and symmetries. Syst. & Control Lett. 45(2), 133–143 (2002)
Várszegi, B., Takács, D., Orosz, G.: On the nonlinear dynamics of automated vehicles-a nonholonomic approach. Eur. J. Mech.-A/Solids 74, 371–380 (2019)
Qin, W.B., Zhang, Y., Takács, D., Stépán, G., Orosz, G.: Dynamics and control of automobiles using nonholonomic vehicle models, arXiv preprint arXiv:2108.02230, (2021)
Bizyaev, I.A., Borisov, A.V., Mamaev, I.S.: The Chaplygin sleigh with parametric excitation: chaotic dynamics and nonholonomic acceleration. Regul. Chaot. Dynam. 22(8), 955–975 (2017)
Tallapragada, P., Fedonyuk, V.: Steering a Chaplygin sleigh using periodic impulses. J. Comput. Nonlinear Dynam. 12(5), 054501 (2017)
Kelly, S.D., Fairchild, M.J., Hassing, P.M., Tallapragada, P.: Proportional heading control for planar navigation: The Chaplygin beanie and fishlike robotic swimming, In: 2012 American Control Conference (ACC). IEEE, 2012, pp. 4885–4890
Kelly, S.D., Murray, R.M.: Geometric phases and robotic locomotion. J. Field Robot. 12(6), 417–431 (1995)
Ostrowski, J., Burdick, J.: The geometric mechanics of undulatory robotic locomotion. Int. J. Robot. Res. 17(7), 683–701 (1998)
Gutman, E., Or, Y.: Symmetries and gaits for Purcell’s three-link microswimmer model. IEEE Trans. Robot. 32(1), 53–69 (2016)
Alouges, F., DeSimone, A., Giraldi, L., Zoppello, M.: Self-propulsion of slender micro-swimmers by curvature control: N-link swimmers. Int. J. Non-Linear Mech. 56, 132–141 (2013)
Kanso, E., Marsden, J.E., Rowley, C.W., Melli-Huber, J.B.: Locomotion of articulated bodies in a perfect fluid. J. Nonlinear Sci. 15(4), 255–289 (2005)
Miloh, T., Galper, A.: Self-propulsion of general deformable shapes in a perfect fluid. Proc. R. Soc. Lond. A 442(1915), 273–299 (1993)
Hatton, R.L., Choset, H.: Geometric swimming at low and high Reynolds numbers. IEEE Trans. Robot. 29(3), 615–624 (2013)
Wiezel, O., Or, Y.: Using optimal control to obtain maximum displacement gait for Purcell’s three-link swimmer, In: Decision and Control (CDC), 2016 IEEE 55th Conference on. IEEE, pp. 4463–4468 (2016)
Kanso, E., Marsden, J.E.: Optimal motion of an articulated body in a perfect fluid,In: Decision and Control, 2005 and 2005 European Control Conference. CDC-ECC’05. 44th IEEE Conference on. IEEE, pp. 2511–2516 (2005)
Chambrion, T., Giraldi, L., Munnier, A.: Optimal strokes for driftless swimmers: a general geometric approach, ESAIM: control. Optim. Calculus of Var. 25, 6 (2019)
Wiezel, O., Or, Y.: Optimization and small-amplitude analysis of Purcell’s three-link microswimmer model. Proc. R. Soc. A 472(2192), 20160425 (2016)
Chakon, O., Or, Y.: Analysis of underactuated dynamic locomotion systems using perturbation expansion: the twistcar toy example. J. Nonlinear Sci. 27(4), 1215–1234 (2017)
Gutman, E., Or, Y.: Optimizing an undulating magnetic microswimmer for cargo towing. Phys. Rev. E 93(6), 063105 (2016)
Yona, T., Or, Y.: The wheeled three-link snake model: singularities in nonholonomic constraints and stick-slip hybrid dynamics induced by coulomb friction. Nonlinear Dynam. 95(3), 2307–2324 (2019)
Sidek, N., Sarkar, N.: Dynamic modeling and control of nonholonomic mobile robot with lateral slip, In: Systems, 2008. ICONS 08. Third International Conference on. IEEE, pp. 35–40 (2008)
Bazzi, S., Shammas, E., Asmar, D., Mason, M.T.: Motion analysis of two-link nonholonomic swimmers. Nonlinear Dynam. 89(4), 2739–2751 (2017)
Salman, H., Dear, T., Babikian, S., Shammas, E., Choset, H.: A physical parameter-based skidding model for the snakeboard, In: Decision and Control (CDC), 2016 IEEE 55th Conference on. IEEE, pp. 7555–7560 (2016)
Tian, Y., Sidek, N., Sarkar, N.: Modeling and control of a nonholonomic wheeled mobile robot with wheel slip dynamics, In: Computational Intelligence in Control and Automation, 2009. CICA 2009. IEEE Symposium on. IEEE, pp. 7–14 (2009)
Dear, T., Kelly, S.D., Travers, M., Choset, H.: Snakeboard motion planning with viscous friction and skidding, In: Robotics and Automation (ICRA), 2015 IEEE International Conference on. IEEE, pp. 670–675 (2015)
Bizyaev, I.A., Borisov, A.V., Kuznetsov, S.P.: The chaplygin sleigh with friction moving due to periodic oscillations of an internal mass. Nonlinear Dynam. 95(1), 699–714 (2019)
Fedonyuk, V., Tallapragada, P.: Stick-slip motion of the Chaplygin sleigh with a piecewise-smooth nonholonomic constraint. J. Comput. Nonlinear Dynam. 12(3), 031021 (2017)
Cheng, P., Frazzoli, E., Kumar, V.: Motion planning for the roller racer with a sticking/slipping switching model, In: Robotics and Automation, 2006. ICRA 2006. Proceedings 2006 IEEE International Conference on. IEEE, pp. 1637–1642 (2006)
Bizyaev, I.A., Borisov, A.V., Mamaev, I.S.: Exotic dynamics of nonholonomic roller racer with periodic control. Regul. Chaot. Dynam. 23(7–8), 983–994 (2018)
Murray, R.M., Li, Z., Sastry, S.S.: A Mathematical Introduction to Robotic Manipulation. CRC Press, Boca Raton, FA (1994)
Appell, P.: Sur une forme générale des équations de la dynamique. Journal für die reine und angewandte Mathematik 121, 310–319 (1900)
Gibbs, J.W.: On the fundamental formulae of dynamics. Am. J. Math. 2(1), 49–64 (1879)
Halvani, O.: Nonholonomic dynamics of the twistcar vehicle: asymptotic analysis and hybrid dynamics of frictional skidding, Faculty of Mechanical Engineering, Technion, Israel,” MSc thesis (Written in Hebrew, extended abstract in English), (2019)
Stépán, G.: Chaotic motion of wheels. Vehicle Syst. Dynam. 20(6), 341–351 (1991)
Tam, D., Hosoi, A.E.: Optimal stroke patterns for Purcell’s three-link swimmer. Phys. Rev. Lett. 98(6), 068105 (2007)
Ostrowski, J.P., Desai, J.P., Kumar, V.: Optimal gait selection for nonholonomic locomotion systems. Int. J. Robot. Res. 19(3), 225–237 (2000)
Dear, T., Kelly, S.D., Travers, M., Choset, H.: Locomotive analysis of a single-input three-link snake robot, In: Decision and Control (CDC), 2016 IEEE 55th Conference on. IEEE, pp. 7542–7547 (2016)
Dear, T., Buchanan, B., Abrajan-Guerrero, R., Kelly, S.D., Travers, M., Choset, H.: Locomotion of a multi-link non-holonomic snake robot with passive joints. Int. J. Robot. Res. 39(5), 598–616 (2020)
Fedonyuk, V., Tallapragada, P.: Locomotion of a compliant mechanism with nonholonomic constraints, J. Mech. Robot., 12(5), (2020)
Funding
This research has been supported by Israeli Science Foundation (ISF) under grant no. 1005/19, and by the Israeli Ministry of Science and Technology under Grant No. 3-15622.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix—singularity analysis of the hybrid dynamics
Appendix—singularity analysis of the hybrid dynamics
The dynamics of the constrained system in (7) and (9) can be rearranged into differential algebraic system as:

The inertia matrix \({{\mathbf {M}}}\) is positive definite, except for degenerate cases where \(m_2\) and/or \(I_1\) vanish (\(\kappa ,\eta _1=0\)), which result in \({{\mathbf {M}}}\) being only positive semi-definite (i.e., singular). Singularity of the constrained dynamics (31) depends on rank of the \(6 \times 6\) matrix \({{\mathbf {A}}}\), whose determinant is denoted \(\Delta \). It has been shown in [29] that this matrix has full rank (\(\Delta \ne 0\)) even for the degenerate point-mass model where \(\kappa =\eta _1=0\) and \(\mathrm {rank}({{\mathbf {M}}})=2\), as long as \({\beta }_1 \ne 0\).
We now investigate conditions for singularity of the dynamics under all possible skid states, considering both cases of controlled actuation torque \(\tau (t)\) or controlled steering angle \(\phi (t)\). In the latter case of controlled angle, since \(\tau \) appears only in the fourth row of (31), and \(\phi (t)\) is no longer unknown, both \(\tau \) and \({\ddot{\phi }}\) can be eliminated by removing both fourth row and fourth column of \({{\mathbf {A}}}\) and reducing (31) to a \(5 \times 5\) system. If the first axle skids, \({\sigma }_1(t)={{\mathbf {w}}}_1(q) \cdot {{\dot{\mathbf{q}}}}\ne 0\), the constraint in the fifth row of (31) no longer holds, and \({\lambda }_1\) can be eliminated from (31). Therefore, both the fifth row and fifth column of \({{\mathbf {A}}}\) should be removed. Similarly, if the second axle skids, the sixth row and sixth column of \({{\mathbf {A}}}\) should be removed. If additionally, the input is the steering angle, the fourth row and column of \({{\mathbf {A}}}\) should be removed as well. That is, each case is associated with removing the fourth and/or fifth and/or sixth row and column from \({{\mathbf {A}}}\). This results in \(n \times n\) matrix for \(n \in \{3,4,5,6\}\), which is still positive semi-definite. Singularity of each case can be assessed by analyzing the determinant \(\Delta _{ijk}\) of the matrix obtained by removing the \(\{i,j,k\}^{th}\) rows and columns of \({{\mathbf {A}}}\). (For example, we denote \(\Delta _4\), \(\Delta _{56}\), \(\Delta _{456}\) etc.). For convenience, the matrix \({{\mathbf {A}}}\) is calculated using the nondimensional quantities defined in (10). Due to rotational invariance of (31), evaluation is made for \({\theta }=0\) without loss of generality. Expressions for the \(n \times n\) determinants for all cases are given in Table 2. Conditions for singularity in all possible skid states and choice of controlled input are summarized in Table 3. We assume that \({\alpha }\in (0,1)\) and \({\beta }_1,{\beta }_2 \in [0,1]\), but alternative limits can be considered as well. The results in Table 3 show that in most of the skid states, the overly simplifying assumptions of massless link (\({\kappa }=0\)) and/or point masses (\(\eta _i=0\)) lead to singularity of the dynamics, where wither accelerations or constraint forces may grow unbounded.
Rights and permissions
About this article

Cite this article
Halvani, O., Or, Y. Nonholonomic dynamics of the Twistcar vehicle: asymptotic analysis and hybrid dynamics of frictional skidding. Nonlinear Dyn 107, 3443–3459 (2022). https://doi.org/10.1007/s11071-021-07151-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-07151-2