
Abstract
To attack a stationary target with both impact time and angle constraints, a novel two-stage guidance strategy is proposed based on the virtual target approach. A moving virtual target that satisfies both impact time and angle requirements is introduced, which substantially simplifies the problem without estimating the time-to-go and its feasibility has been theoretically proved in this paper. For the first stage, taking into account the nonlinear engagement dynamics, an energy optimal closed-loop guidance law is derived to intercept the virtual target with zero impact angle, which is in an analytical form so it can be implemented without any numerical algorithms. Then for the second stage, the proportional navigation guidance law is employed to enhance the robustness against potential disturbances, which also offers the property that the overall two-stage guidance law is almost-smooth at the switching time. The proposed methodology is capable to accommodate the all-aspect attacking scenario with arbitrary initial conditions and arbitrary terminal impact constraints. At last, the effect of navigation coefficients as well as the performance of the proposed guidance law in different engagement scenarios is assessed by several numerical simulations.











Similar content being viewed by others


Availability of data and material
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Code availability
The code that supports the findings of this study are available from the corresponding author upon reasonable request.
References
Ryoo, C.-K., Cho, H., Tahk, M.-J.: Optimal guidance laws with terminal impact angle constraint. J. Guidance Control Dyn. 28(4), 724–732 (2005). https://doi.org/10.2514/1.8392
Song, T.L., Shin, S.J.: Time-optimal impact angle control for vertical plane engagements. IEEE Trans. Aerosp. Electron. Syst. 35(2), 738–742 (1999). https://doi.org/10.1109/7.766954
Tsalik, R., Shima, T.: Optimal guidance around circular trajectories for impact-angle interception. J. Guidance Control Dyn. 39(6), 1278–1291 (2016). https://doi.org/10.2514/1.g001759
Lu, P., Chavez, F.: “Nonlinear Optimal Guidance,” AIAA Guidance, Navigation, and Control Conference and Exhibit. American Institute of Aeronautics and Astronautics (2006). https://doi.org/10.2514/6.2006-6079
Lee, Y.-I., Kim, S.-H., Tahk, M.-J.: Optimality of linear time-varying guidance for impact angle control. IEEE Trans. Aerosp. Electron. Syst. 48(4), 2802–2817 (2012). https://doi.org/10.1109/taes.2012.6324662
Li, H., Wang, J., He, S., Lee, C.-H.: Nonlinear optimal impact-angle-constrained guidance with large initial heading error. J. Guidance Control Dyn. (2021). https://doi.org/10.2514/1.g005868
Gopalan, A., Ratnoo, A., Ghose, D.: Generalized time-optimal impact-angle-constrained interception of moving targets. J. Guidance Control Dyn. 40(8), 2115–2120 (2017). https://doi.org/10.2514/1.g002384
Xiong, S., Wei, M., Zhao, M., Xiong, H., Wang, W., Zhou, B.: Hyperbolic tangent function weighted optimal intercept angle guidance law. Aerosp. Sci. Technol. 78, 604–619 (2018). https://doi.org/10.1016/j.ast.2018.05.018
Kumar, S.R., Maity, A.: Finite–Horizon robust suboptimal control-based impact angle guidance. IEEE Trans. Aerosp. Electron. Syst. 56(3), 1955–1965 (2020). https://doi.org/10.1109/taes.2019.2938126
Xiong, S., Wang, W., Liu, X., Wang, S., Chen, Z.: Guidance law against maneuvering targets with intercept angle constraint. ISA Trans. 53(4), 1332–1342 (2014). https://doi.org/10.1016/j.isatra.2014.03.007
Kumar, S.R., Rao, S., Ghose, D.: Nonsingular terminal sliding mode guidance with impact angle constraints. J. Guidance Control Dyn. 37(4), 1114–1130 (2014). https://doi.org/10.2514/1.62737
Zhao, Y., Sheng, Y., Liu, X.: Sliding mode control based guidance law with impact angle constraint. Chin. J. Aeronaut. 27(1), 145–152 (2014). https://doi.org/10.1016/j.cja.2013.12.011
Erer, K.S., Merttopçuoglu, O.: Indirect impact-angle-control against stationary targets using biased pure proportional navigation. J. Guidance Control Dyn. 35(2), 700–704 (2012). https://doi.org/10.2514/1.52105
Erer, K.S., Ozgoren, M.K.: Control of impact angle using biased proportional navigation. In: AIAA Guidance, Navigation, and Control (GNC) Conference. American Institute of Aeronautics and Astronautics (2013). https://doi.org/10.2514/6.2013-5113
Zhang, Y.-A., Ma, G.-X., Wu, H.-L.: A biased proportional navigation guidance law with large impact angle constraint and the time-to-go estimation. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 228(10), 1725–1734 (2013). https://doi.org/10.1177/0954410013513754
Jeon, I.-S., Lee, J.-I., Tahk, M.-J.: Impact-time-control guidance law for anti-ship missiles. IEEE Trans. Control Syst. Technol. 14(2), 260–266 (2006). https://doi.org/10.1109/tcst.2005.863655
Tsalik, R., Shima, T.: Circular impact-time guidance. J. Guidance Control Dyn. 42(8), 1836–1847 (2019). https://doi.org/10.2514/1.g004074
Gutman, S.: Impact-time vector guidance. J. Guidance Control Dyn. 40(8), 2110–2114 (2017). https://doi.org/10.2514/1.g002556
Jeon, I.-S., Lee, J.-I., Tahk, M.-J.: Impact-time-control guidance with generalized proportional navigation based on nonlinear formulation. J. Guidance Control Dyn. 39(8), 1885–1890 (2016). https://doi.org/10.2514/1.g001681
Kim, H.-G., Cho, D., Kim, H.J.: Sliding mode guidance law for impact time control without explicit time-to-go estimation. IEEE Trans. Aerosp. Electron. Syst. 55(1), 236–250 (2019). https://doi.org/10.1109/taes.2018.2850208
Hu, Q., Han, T., Xin, M.: Sliding-mode impact time guidance law design for various target motions. J. Guidance Control Dyn. 42(1), 136–148 (2019). https://doi.org/10.2514/1.g003620
Lee, J.-I., Jeon, I.-S., Tahk, M.-J.: Guidance law to control impact time and angle. IEEE Trans. Aerosp. Electron. Syst. 43(1), 301–310 (2007). https://doi.org/10.1109/taes.2007.357135
Kim, T.-H., Lee, C.-H., Jeon, I.-S., Tahk, M.-J.: Augmented polynomial guidance with impact time and angle constraints. IEEE Trans. Aerosp. Electron. Syst. 49(4), 2806–2817 (2013). https://doi.org/10.1109/taes.2013.6621856
Livermore, R., Shima, T.: Deviated pure-pursuit-based optimal guidance law for imposing intercept time and angle. J. Guidance Control Dyn. 41(8), 1807–1814 (2018). https://doi.org/10.2514/1.g003179
Tekin, R., Erer, K.S., Holzapfel, F.: Adaptive impact time control via look-angle shaping under varying velocity. J. Guidance Control Dyn. 40(12), 3247–3255 (2017). https://doi.org/10.2514/1.g002981
Tekin, R., Erer, K.S., Holzapfel, F.: Polynomial shaping of the look angle for impact-time control. J. Guidance Control Dyn. 40(10), 2668–2673 (2017). https://doi.org/10.2514/1.g002751
Kang, S., Tekin, R., Holzapfel, F.: Generalized impact time and angle control via look-angle shaping. J. Guidance Control Dyn. 42(3), 695–702 (2019). https://doi.org/10.2514/1.g003765
Tekin, R., Erer, K.S.: Impact time and angle control against moving targets with look angle shaping. J. Guidance Control Dyn. 43(5), 1020–1025 (2020). https://doi.org/10.2514/1.g004762
Lee, J.-Y., Kim, H.: Impact Time and Angle Control Guidance with Rendezvous Concept. In: AIAA Guidance. Navigation, and Control Conference, American Institute of Aeronautics and Astronautics 2018,(2018). https://doi.org/10.2514/6.2018-1322
Hu, Q., Han, T., Xin, M.: New impact time and angle guidance strategy via virtual target approach. J. Guidance Control Dyn. 41(8), 1755–1765 (2018). https://doi.org/10.2514/1.g003436
Chen, X., Wang, J.: Two-stage guidance law with impact time and angle constraints. Nonlinear Dyn. 95(3), 2575–2590 (2018). https://doi.org/10.1007/s11071-018-4710-3
Cheng, Z., Wang, B., Liu, L., Wang, Y.: A composite impact-time-control guidance law and simultaneous arrival. Aerosp. Sci. Technol. 80, 403–412 (2018). https://doi.org/10.1016/j.ast.2018.05.009
Kim, H.-G., Kim, H.J.: Backstepping-based impact time control guidance law for missiles with reduced seeker field-of-view. IEEE Trans. Aerosp. Electron. Syst. 55(1), 82–94 (2019). https://doi.org/10.1109/taes.2018.2848319
Yan, X., Zhu, J., Kuang, M., Yuan, X.: A computational-geometry-based 3-dimensional guidance law to control impact time and angle. Aerosp. Sci. Technol. (2020). https://doi.org/10.1016/j.ast.2019.105672
Zhao, Y., Sheng, Y., Liu, X.: Analytical impact time and angle guidance via time-varying sliding mode technique. ISA Trans. 62, 164–176 (2016). https://doi.org/10.1016/j.isatra.2016.02.002
Bryson, A.E., Ho, Y.-C.: Applied Optimal Control. Routledge (2018). https://doi.org/10.1201/9781315137667
Chen, X., Wang, J.: Optimal control based guidance law to control both impact time and impact angle. Aerosp. Sci. Technol. 84, 454–463 (2019). https://doi.org/10.1016/j.ast.2018.10.036
Funding
This work was supported in part by the Shanghai Aerospace Science and Technology Innovation Fund under the Grant Number SAST2018005, and Aerospace Science and Technology Fund under the Grant Number JZJJX20190017.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared that they have no conflicts of interest.
Ethics approval
The authors declared that the work submitted to Nonlinear Dynamics is original research that has not been published previously, and not under consideration for publication elsewhere, in whole or in part.
Consent for publication
All authors whose names appear on the submission made substantial contributions to the conception or design of the work and approved the version to be published and agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Proof of Theorem and Corollary
1.1 Appendix A.1: Proof of Theorem 1
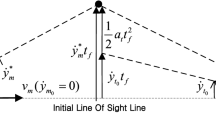
From the triangular geometry in Fig. 2, following equations are derived based on the Law of Cosines.
Sufficiency We will proof \(r_v(t)=0,\forall t\in [t^*,T_{\mathrm{imp}}]\) by contradiction, so we firstly assume \(\exists t_1\in [t^*,T_{\mathrm{imp}}]:r_v(t_1)=C\) where \(C\ne 0\) is a positive constant. Considering that the condition \(\exists t^*\le T_{\mathrm{imp}}: \lambda _t(t)=\theta _{\mathrm{imp}}=\gamma _v,\forall t\in \left[ t^*, T_{\mathrm{imp}}\right] \) indicates \({\dot{\lambda }}_t(t)=0,\forall t\in \left[ t^*, T_{\mathrm{imp}}\right] \), it can be obtained from following equation that \(\lambda _t(t)=\gamma (t),\forall t\in \left[ t^*, T_{\mathrm{imp}}\right] \)
Thus \(\gamma _{v}=\gamma (t)\) holds, then substitute it into
we have \({\dot{r}}_v(t)=0\), so \(r_v(t)=C, \forall t\in \left[ t^*, T_{\mathrm{imp}}\right] \) is derived.
Again, since \(\lambda _t(t)=\gamma _v,\forall t\in \left[ t^*, T_{\mathrm{imp}}\right] \), Eq. (A.1) can be rewritten in the form of
Take into account the fact that \({r_t}/{V}\le T_{\mathrm{imp}}-t\), it is obtained from (A.5) that
which, however, contradicts to the condition that \( r_t(T_{\mathrm{imp}})=0\), hence the assumption \(\exists t_1\in [t^*,T_{\mathrm{imp}}]:r_v(t_1)=C\ne 0\) does not holds. Now we have completed the proof of \(\exists t^*\le T_{\mathrm{imp}}, r_v(t)=0, \forall t\in [t^*,T_{\mathrm{imp}}]\).
Necessity Considering \(r_v(t)=0,\forall t\in [t^*,T_{\mathrm{imp}}]\), from (A.2) we know that \(r_t(t)=V\left( T_{\mathrm{imp}}-t\right) \) holds for \(\forall t\in [t^*,T_{\mathrm{imp}}]\) then \(r_t(T_{\mathrm{imp}})=0\) is obtained.
Now on the basis of \(r_v(t)=0\) and \(r_t(t)=V\left( T_{\mathrm{imp}}-t\right) , \forall t\in [t^*,T_{\mathrm{imp}}]\), Eq. (A.1) can be rewritten as
thus \(\lambda _t(t)=\gamma _v=\theta _{\mathrm{imp}},\forall t\in [t^*,T_{\mathrm{imp}}]\) is obtained.
1.2 Appendix A.2: Proof of Corollary 1
Since \(\exists t^*\le T_{\mathrm{imp}}:r_v(t^*)=0\), substituting it into (A.2), we have
which indicates that the triangle in Fig. 2 is isosceles and two following base angles at this moment are therefore equal, i.e.,
According to Theorem 1, \(r_v(t^*)=0\) implies \(\lambda _t(t^*)=\gamma _v\), then substitute it into (A.9), we have
holds. Now rewrite the first time derivative of \(r_v(t)\) as
then substitute (A.10) into (A.11), we have \({\dot{r}}_v(t^*)=V\sin \left( \gamma (t^*)-\gamma _v\right) \). The objective in Problem 2, namely \(r_v(t)=0, \forall t\in [t^*,T_{\mathrm{imp}}]\), indicates that \({\dot{r}}_v(t^*)=0\) holds, hence \(\gamma (t^*)=\gamma _v\) is derived.
Appendix B: Derivation of \({\dot{\lambda }}_v\)
such that
Then according to the Rule of Sines and Cosines, the triangle geometry in Fig. 2 give us
And we know that
from (1). Now substitute (B.3)-(B.7) into (B.2) which becomes
then Eq. (37) is derived.
Rights and permissions
About this article

Cite this article
Zhang, Z., Ma, K., Zhang, G. et al. Virtual target approach-based optimal guidance law with both impact time and terminal angle constraints. Nonlinear Dyn 107, 3521–3541 (2022). https://doi.org/10.1007/s11071-021-07142-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-07142-3