
Abstract
Quadcopters typically suspend large-size loads by dual-hoist mechanisms for material-handling services. The dual-hoist dynamics exhibit complex coupling effects between the quadcopter attitude and distributed-mass loads. Therefore, manipulation is a challenging task due to the dual-hoist dynamics. Some progress has been focused on single-hoist dynamics of quadcopters slung loads. However, little attention has been directed at dual-hoist dynamics. A planar dual-hoist dynamic model in near-hover operation can be noted in this article, and simultaneously used to design an oscillation-control method so as to facilitate flying such aerial cranes. Technological achievements presented in simulations exhibit the dynamic behavior of the analytical model and demonstrate that the control method succeeded in restraining the quadcopter attitude and load oscillations. The theoretical findings in this article might extend to other types of aerial cranes, such as helicopters or tiltrotors slung loads.









Similar content being viewed by others


Data availability statements
Data will be made available from the corresponding author on reasonable request.
References
Glida, H., Abdou, L., Chelihi, A., et al.: Optimal model-free backstepping control for a quadrotor helicopter. Nonlinear Dyn. 100(4), 3449–3468 (2020)
Eskandarpour, A., Sharf, I.: A constrained error-based MPC for path following of quadrotor with stability analysis. Nonlinear Dyn. 99(2), 899–918 (2020)
Harshavarthini, S., Sakthivel, R., Ahn, C.: Finite-time reliable attitude tracking control design for nonlinear quadrotor model with actuator faults. Nonlinear Dyn. 96(4), 2681–2692 (2019)
Ansari, U., Bajodah, A., Kada, B.: Development and experimental investigation of a Quadrotor’s robust generalized dynamic inversion control system. Nonlinear Dyn. 96(2), 1541–1557 (2019)
Xu, Q., Wang, Z., Zhen, Z.: Adaptive neural network finite time control for quadrotor UAV with unknown input saturation. Nonlinear Dyn. 98(3), 1973–1998 (2019)
Tang, S., Wüest, V., Kumar, V.: Aggressive flight with suspended payloads using vision-based control. IEEE Robot. Autom. Lett. 3(2), 1152–1159 (2018)
Vahdanipour, M., Khodabandeh, M.: Adaptive fractional order sliding mode control for a quadcopter with a varying load. Aerosp. Sci. Technol. 86, 737–747 (2019)
Dong, W., Ding, Y., Yang, L., et al.: An efficient approach for stability analysis and parameter tuning in delayed feedback control of a flying robot carrying a suspended load. J. Dyn. Syst. Measur. Control 141(8), 081015 (2019)
Liang, X., Fang, Y., Sun, N., et al.: A novel energy-coupling-based hierarchical control approach for unmanned quadcopter transportation systems. IEEE/ASME Trans. Mechatron. 24(1), 248–259 (2019)
De Angelis, E., Giulietti, F., Pipeleers, G.: Two-time-scale control of a multirotor aircraft for suspended load transportation. Aerosp. Sci. Technol. 84, 193–203 (2019)
Yang, S., Xian, B.: Energy-based nonlinear adaptive control design for the Quadcopter UAV system with a suspended payload. IEEE Trans. Industr. Electron. 67(3), 2054–2064 (2019)
Godbole, A.R., Subbarao, K.: Nonlinear control of unmanned aerial vehicles with cable suspended payloads. Aerospace Science and Technology, vol. 93, p.105299 (2019)
Yu, G., Cabecinhas, D., Cunha, R., et al.: Nonlinear backstepping control of a quadrotor-slung load system. IEEE/ASME Trans. Mechatron. 24(5), 2304–2315 (2019)
Bin, X., Wang, S., Yang, S.: Nonlinear adaptive control for an unmanned aerial payload transportation system: theory and experimental validation. Nonlinear Dyn. 98(3), 1745–1760 (2019)
Cruz, P., Fierro, R.: Cable-suspended load lifting by a quadcopter UAV: hybrid model, trajectory generation, and control. Auton. Robot. 41(8), 1629–1643 (2017)
Sayyaadi, H., Soltani, A.: Modeling and control for cooperative transport of a slung fluid container using quadcopter. Chin. J. Aeronaut. 31(2), 262–272 (2018)
Barikbin, B., Fakharian, A.: Trajectory tracking for quadcopter UAV transporting cable-suspended payload in wind presence. Trans. Inst. Meas. Control. 41(5), 1243–1255 (2019)
Mohammadi, A., Abbasi, E., Ghayour, M., et al.: Formation control and path tracking for a group of quadcopter to carry out a suspended load. Modares Mech. Eng. 19(4), 887–899 (2019)
Cabecinhas, D., Cunha, R., Silvestre, C.: A trajectory tracking control law for a Quadcopter with slung load. Automatica 106, 384–389 (2019)
Guo, M., Gu, D., Zha, W., et al.: Controlling a quadcopter carrying a cable-suspended load to pass through a window. J. Intell. Robot. Syst. 98, 387–401 (2020)
Qian, L., Liu, H.: Path following control of a quadcopter UAV with a cable suspended payload under wind disturbances. IEEE Trans. Industr. Electron. 67(3), 2021–2029 (2019)
Cabecinhas, D., Cunha, R., Silvestre, C.: A trajectory tracking control law for a quadrotor with slung load. Automatica 106, 384–389 (2019)
Qian, L., Liu, H.: Path following control of a quadrotor UAV with a cable suspended payload under wind disturbances. IEEE Trans. Industr. Electron. 67(3), 2021–2029 (2019)
Hashemi, D., Heidari, H.: Trajectory planning of Quadrotor UAV with maximum payload and minimum oscillation of suspended load using optimal control. J. Intell. Rob. Syst. 100, 1369–1381 (2020)
Ogunbodede, O., Yoshinaga, R., Singh, T.: Vibration control of unmanned aerial vehicle with suspended load using the concept of differential flatness. In: American Control Conference, Philadelphia, PA, USA, pp. 4268–4273 (2019)
Homolka, P., Hromčík, M., Vyhlídal, T.: Input shaping solutions for drones with suspended load: First results. In: International Conference on Process Control, Strbske Pleso, Slovakia, pp. 30–35 (2017)
Palunko, I., Cruz, P., Fierro, R.: Agile load transportation: safe and efficient load manipulation with aerial robots. IEEE Robot. Autom. Mag. 19(3), 69–79 (2012)
Sadr, S., Moosavian, A., Zarafshan, P.: Dynamics modeling and control of a quadcopter with swing load. J. Robot., 265897 (2014)
Cruz, P., Oishi, M., Fierro, R.: Lift of a cable-suspended load by a quadcopter: a hybrid system approach. In: American Control Conference, Chicago, IL, USA, pp. 1887–1892 (2015)
Johnson, N., Singhose, W.: Dynamics and modeling of a quadcopter with a suspended payload. In: Applied Aerodynamics Conference, Atlanta, Georgia, USA, p. 4213 (2018)
de Angelis, E.: Swing angle estimation for multicopter slung load applications. Aerosp. Sci. Technol. 89, 264–274 (2019)
Gupta, N., Bryson, A.: Near-hover control of a helicopter with a hanging load. J. Aircr. 13(3), 217–222 (1976)
Enciu, K., Rosen, A.: Nonlinear dynamical characteristics of fin-stabilized underslung loads. AIAA J. 53(3), 723–738 (2015)
Cao, Y., Wang, Z.: Equilibrium characteristics and stability analysis of helicopter slung-load system. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 231(6), 1056–1064 (2016)
Rego, B.S., Raffo, G.V.: Suspended load path tracking control using a tilt-rotor UAV based on zonotopic state estimation. J. Franklin Inst. 356(4), 1695–1729 (2019)
Erskine, J., Chriette, A., Caro, S.: Wrench analysis of cable-suspended parallel robots actuated by quadcopter unmanned aerial vehicles. J. Mech. Robotics 11(2), 020909 (2019)
Shirani, B., Majdeddin, N., Izadi, I.: Cooperative load transportation using multiple UAVs. Aerosp. Sci. Technol. 84, 158–169 (2019)
Kane, T., Likins, P., Levinson, D.: Spacecraft Dynamics. The Internet-First University Press (2005)
Adams, C., Potter, J., Singhose, W.: Input-shaping and model-following control of a helicopter carrying a suspended load. J. Guid. Control. Dyn. 38(1), 94–105 (2015)
Baklouti, S., Courteille, E., Lemoine, P., Caro, S.: Input shaping for feed-forward control of cable-driven parallel robots. J. Dyn. Syst. Measurement Control 143(2), 021007 (2021)
Zhao, X., Huang, J.: Distributed-mass payload dynamics and control of dual cranes undergoing planar motions. Mech. Syst. Signal Process. 126, 636–648 (2019)
Funding
The authors would like to acknowledge the support of the National Natural Science Foundation of China for grant 51775041.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendix
Appendix
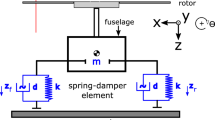
The nonlinear equations of the motion in Fig. 1 are listed below:
The acceleration constraints of the four-bar linkage are listed below:
Rights and permissions
About this article

Cite this article
Zhu, K., Huang, J. Planar dual-hoist dynamics of quadcopters carrying slender loads. Nonlinear Dyn 106, 3101–3115 (2021). https://doi.org/10.1007/s11071-021-06977-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06977-0