
Abstract
The present study deals with the basins of the equilibrium points embedded within the normal forms of Bogdanov–Takens bifurcation with delayed feedback control. It is numerically shown that the unstable periodic orbit that coexists with the equilibrium point stabilized by delayed feedback control is associated with the basin of the stabilized point. The relation between the periodic orbit and the basin indicates that for enlarging the basin, a homoclinic bifurcation for the orbit and a saddle point can provide useful information for the design of delayed feedback controllers. These results are experimentally confirmed in a real direct-current bus circuit that has dynamics similar to that of the normal form .














Similar content being viewed by others

Data availability
The data in this work are available from the authors on reasonable request.
Notes
See Subsect. 2.2 for more details.
The states \( {\varvec{x}}_0 \) are set in \( 50 \times 50 \) grids with \( x_1(0) \in [x_{1l}^* - 3, x_{1l}^* + 3] \) and \( x_2(0) \in [x_{2l}^* - 3, x_{2l}^* + 3] \). A light-blue (red) dot is plotted if the trajectory starting from the dot converges (does not converge) to \( [x_{1l}^*, x_{2l}^*]^\text {T}\). The criterion for the convergence is given by the inequality \( \left| [x_1(1000)-x_{1l}^*, x_2(1000)-x_{2l}^*]^\text {T}\right| < 0.01 \).
r is numerically obtained as \((\text {number of light-blue dots})/2500\).
The stability region shown in Fig. 1 has three stable sets. The present paper deals with the largest set.
The numerical procedure used for calculating the index is the same as that for Fig. 6. The states \( {\varvec{x}}_0 \) are set in \( 50 \times 50 \) grids with \( x_{1}(0) \in [0.1, 1.2] \) and \( x_{2}(0) \in [0.1, 10] \).
Note that safe operation does not include the following case: the voltage \( v_\text {P}(t) \) converges to the equilibrium point but touches the edges.
We implemented one bipolar power supply by connecting the constant-voltage (CV) output terminal and the CV load terminal of a power supply (GPP-4323G, TEXIO). The other bipolar power supply was realized by combining the CV output (PW24-1.5AQ, TEXIO) and the CV load (PLZ164W, KIKUSUI).
References
Yoshida, K., Konishi, K., Hara, N.: Design of delayed feedback controller for a robust DC bus system. Proc. SICE Annual Conference 881–885,(2018)
Schöll, E., Schuster, H.G. (eds.): Handbook of Chaos Control. Wiley, Weinheim, Germany (2007)
Pyragas, K.: Continuous control of chaos by self-controlling feedback. Phys. Lett. A 170, 421–428 (1992)
Pyragas, K.: Delayed feedback control of chaos. Philos. Trans. R. Soc. A 364, 2309–2334 (2006)
Hövel, P.: Control of complex nonlinear systems with delay. Springer, Berlin Heidelberg (2010)
Just, W., Bernard, T., Ostheimer, M., Reibold, E., Benner, H.: Mechanism of time-delayed feedback control. Phys. Rev. Lett. 78, 203–206 (1997)
Hövel, P., Schöll, E.: Control of unstable steady states by time-delayed feedback methods. Phys. Rev. E 72, 046203 (2005)
Brown, G., Postlethwaite, C.M., Silber, M.: Time-delayed feedback control of unstable periodic orbits near a subcritical Hopf bifurcation. Phys. D 240, 859–871 (2011)
Hooton, E.W., Amann, A.: Analytical limitation for time-delayed feedback control in autonomous systems. Phys. Rev. Lett. 109, 154101 (2012)
Pyragas, V., Pyragas, K.: Act-and-wait time-delayed feedback control of autonomous systems. Phys. Lett. A 382, 574–580 (2018)
Čermák, J., Nechvátal, L.: On stabilization of unstable steady states of autonomous ordinary differential equations via delayed feedback controls. Phys. D 404, 132339 (2020)
Ushio, T.: Limitation of delayed feedback control in nonlinear discrete-time systems. IEEE Trans. Circuits Syst. I(43), 815–816 (1996)
Kokame, H., Hirata, K., Konishi, K., Mori, T.: State difference feedback for stabilizing uncertain steady states of non-linear systems. Int. J. Control 74, 537–546 (2001)
Kokame, H., Hirata, K., Konishi, K., Mori, T.: Difference feedback can stabilize uncertain steady states. IEEE Trans. Autom. Control 46, 1908–1913 (2001)
Cetinkaya, A., Hayakawa, T.: A sampled-data approach to Pyragas-type delayed feedback stabilization of periodic orbits. IEEE Trans. Autom. Control 64, 3748–3755 (2019)
Pyragas, K., Novičenko, V.: Time-delayed feedback control design beyond the odd-number limitation. Phys. Rev. E 88, 012903 (2013)
Pyragas, V., Pyragas, K.: Continuous pole placement method for time-delayed feedback controlled systems. Eur. Phys. J. B 87, 274 (2014)
Ji, J.C.: Two families of super-harmonic resonances in a time-delayed nonlinear oscillator. J. Sound Vib. 349, 299–314 (2015)
Shang, H., Xu, J.: Delayed feedbacks to control the fractal erosion of safe basins in a parametrically excited system. Chaos, Solitons & Fractals 41, 1880–1896 (2009)
Yamasue, K., Hikihara, T.: Domain of attraction for stabilized orbits in time delayed feedback controlled Duffing systems. Phys. Rev. E 69, 056209 (2004)
Höhne, K., Shirahama, H., Choe, C.U., Benner, H., Pyragas, K., Just, W.: Global properties in an experimental realization of time-delayed feedback control with an unstable control loop. Phys. Rev. Lett. 98, 214102 (2007)
Wang, H., Chen, G.: On the initial function space of time-delayed systems: a time-delayed feedback control perspective. J. Frankl. Inst. 352, 3243–3249 (2015)
Zheng, Y.G., Sun, J.Q.: Attractive domain of nonlinear systems with time-delayed feedback control and time-delay effects. Procedia IUTAM 22, 51–58 (2017)
Leng, S., Lin, W., Kurths, J.: Basin stability in delayed dynamics. Sci. Rep. 6, 21449 (2016)
Yan, Y., Xu, J., Wiercigroch, M.: Basins of attraction of the bistable region of time-delayed cutting dynamics. Phys. Rev. E 96, 032205 (2017)
von Loewenich, C., Benner, H., Just, W.: Experimental relevance of global properties of time-delayed feedback control. Phys. Rev. Lett. 93, 174101 (2004)
Just, W., Benner, H., von Loewenich, C.: On global properties of time-delayed feedback control: weakly nonlinear analysis. Phys. D 199, 33–44 (2004)
Kuznetsov, Y.A.: Elements of applied bifurcation theory. Springer, New York (2004)
Singh, S., Gautam, A.R., Fulwani, D.: Constant power loads and their effects in DC distributed power systems: a review. Renew. Sustain. Energy Rev. 72, 407–421 (2017)
AL-Nussairi, M.K., Bayindir, R., Padmanaban, S., Mihet-Popa, L., Siano, P. : Constant power loads (CPL) with microgrids: problem definition, stability analysis and compensation techniques. Energies 10, 1656 (2017)
Hossain, E., Perez, R., Nasiri, A., Padmanaban, S.: A comprehensive review on constant power loads compensation techniques. IEEE Access 6, 33285–33305 (2018)
Han, Y., Ning, X., Yang, P., Xu, L.: Review of power sharing, voltage restoration and stabilization techniques in hierarchical controlled DC microgrids. IEEE Access 7, 149202–149223 (2019)
Kumar, J., Agarwal, A., Agarwal, V.: A review on overall control of DC microgrids. J. Energy Storage 21, 113–138 (2019)
Fulwani, D.K., Singh, S.: Mitigation of negative impedance instabilities in DC distribution systems. Springer, Singapore (2017)
Engelborghs, K., Luzyanina, T., Roose, D.: Numerical bifurcation analysis of delay differential equations using DDE-BIFTOOL. ACM Trans. Math. Softw. 28, 1–21 (2002)
Planas, E., Andreu, J., Gárate, J.I., Martínez de Alegría, I., Ibarra, E.: AC and DC technology in microgrids: a review. Renew. Sustain. Energy Rev. 43, 726–749 (2015)
Elsayed, A.T., Mohamed, A.A., Mohammed, O.A.: DC microgrids and distribution systems: an overview. Electr. Power Syst. Res. 119, 407–417 (2015)
Dragicevic, T., Lu, X., Vasquez, J.C., Guerrero, J.M.: DC microgrids–part II: a review of power architectures, applications, and standardization issues. IEEE Trans. Power Electr. 31, 3528–3549 (2016)
Kumar, D., Zare, F., Ghosh, A.: DC microgrid technology: system architectures, AC grid interfaces, grounding schemes, power quality, communication networks, applications, and standardizations aspects. IEEE Access 5, 12230–12256 (2017)
Prabhala, V.A., Baddipadiga, B.P., Fajri, P., Ferdowsi, M.: An overview of direct current distribution system architectures & benefits. Energies 11, 2463 (2018)
Konishi, K., Sugitani, Y., Hara, N.: Analysis of a dc bus system with a nonlinear constant power load and its delayed feedback control. Phys. Rev. E 89, 022906 (2014)
Yoshida, K., Konishi, K., Hara, N.: Experimental observation of destabilization in a DC bus system and its stabilization with delayed feedback control. Nonlinear Dyn. 98, 1645–1657 (2019)
Konishi, K., Sugitani, Y., Hara, N.: Dynamics of dc bus networks and their stabilization by decentralized delayed feedback. Phys. Rev. E 91, 012911 (2015)
Socolar, J.E.S., Sukow, D.W., Gauthier, D.J.: Stabilizing unstable periodic orbits in fast dynamical systems. Phys. Rev. E 50, 3245–3248 (1994)
Pyragas, K., Pyragas, V., Benner, H.: Delayed feedback control of dynamical systems at a subcritical Hopf bifurcation. Phys. Rev. E 70, 056222 (2004)
Scholl, T.H., Hagenmeyer, V., Gröll, L.: On norm-based estimations for domains of attraction in nonlinear time-delay systems. Nonlinear Dyn. 100, 2027–2045 (2020)
Acknowledgements
This study was supported in part by JSPS KAKENHI (18H03306 and 21H03513).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This paper is a substantially extended version of a conference paper presented at the SICE Annual Conference 2018 [1].
Appendices
Appendix A: Solutions of time-delayed dynamical systems
This appendix gives a brief explanation of the solutions of autonomous time-delayed dynamical systems. For simplicity, we consider a time-delayed system with single scalar variable \( x \in {\mathbb {R}} \) and a single constant delay \( \tau \ge 0 \),
The dynamics depends on both the current state x(t) and the previous state \(x(t-\tau )\). Therefore, a time function,
is required as an initial condition for the time development of time-delayed system (19).
Appendix B: Saddle-node bifurcation of UPOs in a DC bus circuit with DFC
This appendix explains the bifurcation scenario that includes the saddle-node bifurcation of UPOs described by the gray lines in Fig. 9. With an increase in k from 0 for a fixed delay time \( \tau \in [6.52, 10.00] \), a pair of UPOs appear at the saddle-node bifurcation curve. As an example, the bifurcation scenario with a fixed \( \tau = 8.0 \) is shown in Fig. 15. The top panel shows an enlarged view of the bifurcation curves in Fig. 9; the bottom panel shows a bifurcation diagram for \( x_1 \). The red symbols \( \text {HP}_\text {sub} \), HC, and SN denote the bifurcation points of the Hopf bifurcation of equilibrium point \( [x_{1+}^*, x_{2+}^*]^\text {T}\), the homoclinic bifurcation of a UPO, and the saddle-node bifurcation of UPOs, respectively.
We now review the bifurcation scenario in Fig. 15 with an increase in k from 0. The unstable equilibrium point \( [x_{1+}^*, x_{2+}^*]^\text {T}\) is stabilized and UPO 1 appears via a subcritical Hopf bifurcation at \( k \approx 0.07 \) (\( \text {HP}_\text {sub} \)). With a further increase in k, UPO 1 enlarges and then disappears via the homoclinic bifurcation at \( k \approx 0.18 \) (HC). At \( k \approx 0.25 \), UPO 2 and UPO 3 are created by the saddle-node bifurcation (SN). The equilibrium point \( [x_{1+}^*, x_{2+}^*]^\text {T}\) becomes unstable and UPO 2 disappears via a subcritical Hopf bifurcation at \( k \approx 0.35 \) (\( \text {HP}_\text {sub} \)).
Appendix C: Procedure for setting initial functions
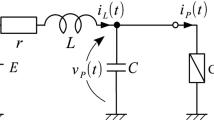
This appendix describes an experimental procedure for setting three restricted initial functions. The implementation of the CPL and the delay unit can be found in our previous study [42]. Figure 16 shows a DC bus circuit with a delayed feedback controller.

Bifurcation curves (top) and bifurcation diagram (bottom) of system (15) along feedback gain k with fixed delay \( \tau = 8.0 \). The top panel shows an enlarged view of Fig. 9 and the bottom panel shows a bifurcation diagram for the \( x_1 \) component of \( [x_{1+}^*, x_{2+}^*]^\text {T}\) and UPOs

DC bus circuit diagram for circuit used in our experiments. The delayed feedback controller is represented by the shaded area. E and \( v_\text {0} \) are bipolar power supplies; two switches are opened at time \( t = 0 \); the delay unit (PIC18F2550) controls output voltage \( v_\text {out}(t) \) using the open/close status of the switches
Two bipolar power suppliesFootnote 8, which can output both positive and negative currents, are used for voltage E and initial voltage \( v_\text {0} \). The power supply that supplies \( v_\text {0} \) is connected to the DC bus line by a switch. This switch is paired with another switch; they open and close at the same time. The lower switch is connected to a 5-V power supply. The delay unit detects whether the switch is open or closed. The delay unit is implemented using a peripheral interface controller (PIC: PIC18F2550-I/SP, Microchip Technology). The unit was modified from a previous one [42] to read the switch’s open/close status and to handle a voltage range of \( v_\text {P} \in [6.0, 20.0]\ \text {V}\). The output voltage \( v_\text {out}(t) \) of the delay unit can be adjusted in accordance with programs implemented in PIC.
The experimental procedure used for setting the initial functions is as follows. First, set \( v_\text {0} \) to a voltage in voltage set (18) and close the switches. Second, after a sufficient amount of time, open the switches at \( t = 0 \). Third, set the output voltage \( v_\text {out}(t) \) to
where \( v^*_\text {P} = {12.0}\ \text {V} \) corresponds to the equilibrium point (i.e., the operating point) of \( v_\text {P} (t) \). We can easily see that \( v_\text {out}(t) \) in Eqs. (21) and (22) realizes the initial functions \( {\varvec{\varPhi }}_1(t)\) and \( {\varvec{\varPhi }}_2(t)\), respectively. \( v_\text {out}(t) \) in Eq. (23) realizes \( {\varvec{\varPhi }}_3(t)\) in a shifted time scale. That is, the DC bus system starts with initial point \( v_\text {out}(0) = v_\text {0} \) and runs without control (i.e., \( i_\text {u} = 0 \)) from \( t = 0 \) to \( t = \varGamma \); DFC works from \( t = \varGamma \).
Rights and permissions
About this article

Cite this article
Yoshida, K., Konishi, K. & Hara, N. Basins and bifurcations of a delayed feedback control system and its experimental verification for a DC bus circuit. Nonlinear Dyn 106, 2363–2376 (2021). https://doi.org/10.1007/s11071-021-06902-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06902-5