
Abstract
For a Stewart platform installed on a moving base-mount, analytical equations of motion are derived utilizing velocities of constituent bodies, computed in the part I-paper. To derive the equations, the principle of virtual work is variationally derived from Hamilton’s principle by examining the variations in rotation matrices since the configuration space of the Stewart platform is defined utilizing both vectors in ℝ3 and rotation matrices in the special orthogonal group, SO(3). The variations in rotation matrices define virtual angular displacements, and the integrability condition of rotation matrices yields the constrained variations in virtual angular velocities. The latter is essential for the variational derivation of the principle. The principle of virtual work seamlessly bridges the gap between the Newton–Euler method and Lagrange’s method (if configuration spaces are defined by generalized coordinates only). Starting from the principle, a systematic method for deriving equations of motion is presented for general multi-body systems and subsequently for a base-moving Stewart platform. The resulting equations in matrix form facilitate the computation of actuator axial forces for inverse dynamics control (IDC). Finally, experiments were performed on a scale model to illustrate the superiority of IDC to the inverse kinematics control, presented in the part I-paper.





Similar content being viewed by others


Change history
14 March 2022
A Correction to this paper has been published: https://doi.org/10.1007/s11071-022-07319-4
References
Do, W.Q.D., Yang, D.C.H.: Inverse dynamic analysis and simulation of a platform type of robot. J. Field Robot. 5(3), 209–227 (1988)
Dasgupta, B., Mruthyunjaya, T.: A Newton–Euler formulation for the inverse dynamics of the Stewart platform manipulator. Mech. Mach. Theory 33(8), 1135–1152 (1998)
Becerra-Vergus, M. Belo, E.: Dynamic modeling of a six degree-of-freedom flight simulator motion base. J. Comput. Nonlinear Dyn. 10(5), 051020 (2015)
Lee, S.-H., Song, J.-B., Choi, W.-C., Hong, D.: Position control of a Stewart platform using inverse dynamics control with approximate dynamics. Mechatronics 13, 605–619 (2003)
Xiaolin, D., Shijie, S., Wenbo, X., Zhangchao, H., Dawei, G.: Modal space neural network compensation control for Gough–Stewart robot with uncertain load. Neurocomputing 449, 245–257 (2021)
Liu, K., Fitzgerald, M., Dawson, D., Lewis, F.L.: Modelling and Control of a Stewart Platform Manipulator. ASME DSC Vol. 33, Control of Systems with Inexact Dynamic Models, pp. 83–89 (1991)
Geng, Z., Haynes, L.S., Lee, J.D., Carroll, R.L.: On the dynamic model and kinematic analysis of a class of Stewart platforms. J. Robot. Autonom. Syst. 9(4), 237–254 (1992)
Lebret, G., Liu, K., Lewis, F.L.: Dynamic analysis and control of a stewart platform manipulator. J. Field Robot. 10(5), 629–655 (1993)
Sohei-l, S.A., Arash, R.: Nonlinear model predictive control of a stewart platform based on improved dynamic model. Int. J. Theor. Appl. Mech. 5, 8–26 (2020)
Gallardo, J., Rico, J.M., Frisoli, A., Checcacci, D., Bergamasco, M.: Dynamics of parallel manipulators by means of screw theory. Mech. Mach. Theory 38(11), 1113–1131 (2003)
Ophaswongse, C., Murray, R.C., Agrawal, S.K.: Wrench capability of a stewart platform with series elastic actuators. J. Mech. Robot. 10(2), paper 021002, 8 pages (2018)
Liu, M.J., Li, C.X., Li, C.N.: Dynamics analysis of the Gough–Stewart platform manipulator. IEEE Trans. Robot. Autom. 16(1), 94–98 (2000)
Wittenburg, J.: Dynamics of Multibody Systems, 2nd ed. Springer, Berlin, ISBN 978-3-540-73913-5 (2008)
Murakami, H.: A moving frame method for multi-body dynamics. In: Proceedings of the ASME 2013 International Mechanical Engineering Congress & Exposition, IMECE2013-62833: pp. V04AT04A079; 12 pages. San Diego, CA, November 15–21 (2013)
Murakami, H.: A moving frame method for multi-body dynamics using SE(3). In: Proceedings of the ASME 2015 International Mechanical Engineering Congress & Exposition, IMECE2015-51192: pp. V04BT04A003; 19 pages. Houston, Texas, November 13–19 (2015)
Frankel, T.: The Geometry of Physics: An Introduction, 3rd edn. Cambridge University Press, New York (2012)
Asada, H., Slotine, J.J.-E.: Robot Analysis and Control. Wiley, New York (1986)
Murray, R.M., Li, Z., Sastry, S.S.: A Mathematical Introduction to Robotics Manipulation. CRC Press, Boca Raton (1994)
Holm, D.D.: Geometric Mechanics: Part II: Rotating, Translating, Rolling. Imperial College Press, London (2008)
Byron, F.W., Jr., Fuller, R.W.: Mathematics of Classical and Quantum Physics. Dover, New York (1992)
Smith, D.R.: Variational Methods in Optimization. Prentice-Hall Inc, Englewood Cliffs, NJ (1974)
Ono, T., Eto, R., Yamakawa, J., Murakami, H.: Development of equations of motion for a Stewart platform under prescribed mount motion. In: Proceedings of the ASME 2018 International Mechanical Engineering Congress & Exposition, IMECE2018–87253, 21 pages (2018)
Leshchenko, D., Ershkov, S., Kozachenko, T.: Evolution of a heavy rigid body rotation under the action of unsteady restoring and perturbation torques. Nonlinear Dyn. 103(5), 1517–1528 (2021). https://doi.org/10.1007/S11071-020-06195-0
Ershkov, S.V., Shamin, R.V.: The dynamics of asteroid rotation, governed by YORP effect: The kinematic Ansatz. Acta Astronaut. 149, 47–54 (2018)
Funding
Not applicable.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Equation of motion for \({{\varvec{\phi}}}_{3}^{\left(2{\varvec{k}}/2{\varvec{k}}-1\right)}({\varvec{t}})\)
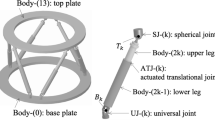
The upper body of leg-(k), body-(2 k), is a circular cylinder with a spherical ball at one end, as illustrated in Fig. I-7. One first observes that (i) the damping couple induced at a spherical joint is negligible since \({\mu }_{SJ}\) is small, and (ii) there is no external couple. The equations of motion for axial rotation \({\phi }_{3}^{\left(2k/2k-1\right)}\left(t\right)\) of body-(2 k) relative to body-(2 k-1) is written including viscous damping couple as:
with the initial conditions:
However, the inertia term in Eq. (A1) is negligible since \({\widehat{J}}_{3C}^{\left(2k\right)}\ll {\widehat{J}}_{1C}^{\left(2k\right)}={\widehat{J}}_{2C}^{(2k)}\) and the axial rotational acceleration is of order (1). Neglecting the inertial term in Eq. (A1), the resulting equation with Eq. (A2) yields \({\phi }_{3}^{\left(2k/2k-1\right)}\left(t\right)=0\).
Appendix B: Time derivatives of \(\left[{{\varvec{B}}}^{\boldsymbol{*}}\right]\) submatrices
\(\left[{\dot{B}}_{TP/TP}^{*}(t)\right]\) and \(\left[{\dot{B}}_{TP/BP}^{*}(t)\right]\) are obtained, respectively, by taking the time derivatives of \(\left[{B}_{TP/TP}^{*}(t)\right]=\left[{B}_{TP/TP}(t)\right]\) defined in Eq. (29c) and \(\left[{B}_{TP/TP}^{*}(t)\right]=\left[{B}_{TP/TP}(t)\right]\) in Eq. (29d).
Taking the time derivatives of Eqs. (44c) and (44d), respectively, one finds
In Eqs. (A5) and (A6), \(\left[{\dot{B}}_{L/L}^{(k)}(t)\right]\) and \(\left[{\dot{B}}_{L/BP}^{\left(k\right)}(t)\right]\) are computed from Eqs. (31c, d) as:
In Eqs. (A5) and (A6), \(\left[{\dot{T}}_{L/TP}^{\left(k\right)}(t)\right]\) is computed from Eq. (39b).
where
In Eq. (A6), \(\left[{\dot{T}}_{L/BP}^{\left(k\right)}(t)\right]\) is computed from Eq. (41b) as:
where from Eq. (35c),
Rights and permissions
About this article

Cite this article
Ono, T., Eto, R., Yamakawa, J. et al. Analysis and control of a Stewart platform as base motion compensators—part II: dynamics. Nonlinear Dyn 106, 3161–3182 (2021). https://doi.org/10.1007/s11071-021-06749-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06749-w