
Abstract
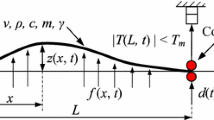
This study concerns the out-of-plane motion of a vertically disposed string with one end fixed and the other subjected to a harmonic excitation. Excited in its primary resonance, the string can vibrate in the direction orthogonal to the excitation direction through nonlinear coupling effects and has out-of-plane motion. To suppress this out-of-plane motion, we propose a boundary control method that modifies the boundary condition of the fixed upper end, i.e., we move the fixed upper end in the direction orthogonal to the external excitation. The unstable range for trivial steady state motion in this direction, which exists in the neighborhood of the primary resonance condition, changes to a stable range under suitable feedback gain. The out-of-plane motion is then suppressed for any excitation frequency. Experiments conducted using a simple apparatus confirmed the validity of the proposed method adopting boundary control.














Similar content being viewed by others

References
Carla, M., Straulino, S.: Measurements on a guitar string as an example of a physical nonlinear driven oscillator. Am. J. Phys. 85(8), 587–595 (2017)
Rowland, D.R.: Understanding nonlinear effects on wave shapes. Am. J. Phys. 83(11), 979–983 (2015)
Anand, G.V.: Large-amplitude damped free vibration of a stretched string. J. Acoust. Soc. Am. 45, 1089–1096 (1969)
O’Reilly, O., Holmes, P.J.: Non-linear, non-planar and non-periodic vibrations of a string. J. Sound Vib. 153, 413–435 (1992)
Chen, L.Q., Tang, Y.Q., Zu, J.W.: Nonlinear transverse vibration of axially accelerating strings with exact internal resonances and longitudinally varying tensions. Nonlinear Dyn. 76(2), 1443–1468 (2014)
Carrier, G.F.: On the non-linear vibration problem of the elastic string. Quart. Appl. Math. 3, 157–165 (1945)
Murthy, G.S.S., Ramakrishma, B.S.: Nonlinear character of resonance in stretched strings. J. Acoust. Soc. Am. 38, 461–463 (1965)
Oplinger, D.W.: Frequency response of a nonlinear stretched string. J. Acoust. Soc. Am. 32, 1529–1538 (1960)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. A Wiley Interscience 338–340, (1979)
Hassan, U., Usman, Z., Anwar, M.S.: Video-based spatial portraits of a nonlinear vibrating string. Am. J. Phys. 80(10), 862–869 (2012)
Gottlieb, O., Rega, G., Lacarbonara, W.: Modeling and analysis of smart localized structural elements for nonlinear vibration control of a taut string. Smart structures and materials 2002: modeling, signal processing, and control 4693, 407–417 (2002)
Harrison, H.: Plane and circular motion of a string. J. Acoust. Soc. Am. 20, 874–875 (1948)
Manktelow, K.L., Leamy, M.J., Ruzzene, M.: Analysis and experimental estimation of nonlinear dispersion in a periodic string. J. Vib. Acoust. Trans. ASME 136(3), (2014)
Anand, G.V.: Nonlinear resonance in stretched strings with viscous damping. J. Acoust. Soc. Am. 40, 1517–1522 (1966)
Lee, E.W.: Non-linear forced vibration of a stretched string. Br. J. Appl. Phys. 8, 411–413 (1957)
Miles, J.W.: Stability of forced oscillations of a vibrating string. J. Acoust. Soc. Am. 38, 855–859 (1965)
Kobayashi, Y., Aso, K.: Longitudinal vibration-control of pipe string for mining manganese nodules in deep sea with an elastic support. International offshore and polar engineering conference 1, 128–135 (1997)
Luongo, A., Vestroni, F.: Bifurcations and stability of amplitude modulated planar oscillations of an orbiting string with internal resonances. Nonlinear Dyn. 9(3), 305–325 (1996)
Di Egidio, A., Luongo, A., Vestroni, F.: Nonstationary nonplanar free motions of an orbiting string with multiple internal resonances. Meccanica 31(3), 363–382 (1996)
Fujino, Y., Warnitchai, P., Pacheco, B.M.: Active stiffness control of cable vibration. J. Appl. Mech. Trans. ASME 60(4), 948–953 (1993)
Zhang, Y.W., Zang, J., Yang, T.Z., Fang, B., Wen, X.: Vibration suppression of an axially moving string with transverse wind loadings by a nonlinear energy sink. Mathematical Problems in Engineering (2013)
Nayfeh, A.H., Balachandran, B.: Applied nonlinear dynamics. A Wiley Interscience 90, (1995)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Derivation of the equations of motion and effect of the stiffness in the string
We derive Eqs. (4 and 5) following section 7 in [9]. By setting the representative length and time as l and \(l\sqrt{\rho A/T_0}\), respectively, the nondimensional equations of motion in \(\xi \), \(\eta \), and \(\zeta \)-directions are, respectively,
In Eq. (58), because \(\beta>>1\), the first term on the left-hand side (i.e., the longitudinal inertia) can be neglected [9]. Also neglecting the higher-order terms, Eq. (58) leads to
Considering the boundary conditions in the \(\zeta \)-direction, \(\zeta ^*=0\) at \(z^*=0\) and \(z^*=1\), yields
We deal with the case that the coefficient \(\frac{EI}{T_0l^2}\) is sufficiently less than 1 as shown in section 7.5 of [9]; for the string used in the present experiment, \(\frac{EI}{T_0l^2}={1.03}\times 10^{-5}\). The third terms on the left-hand sides of Eqs. (56 and 57) are then neglected. Regarding the orders of \(\xi \), \(\eta \), and \(\zeta \) as \(O(\zeta )=O(\xi ^2)=O(\eta ^2)\), we neglect the terms related to \({\left( \frac{d \zeta ^*}{dz^{*}}\right) }^2\) in Eqs. (56 and 57). Then, substituting Eq. (60) in Eqs. (56 and 57), we obtain Eqs. (4 and 5), in which the viscous damping effect is further considered.
Derivation of the amplitude equations adopting the method of multiple scales
In this appendix, we derive the amplitude equations in the case with feedback control by applying the method of multiple scales. In the case without feedback control, we replace \(\mu _{\mathrm {c}}\) with \(\mu \). The asterisk is omitted.
1.1 Ordering of the terms
The orders of the terms and the expansion of the approximate solution are fundamentally decided in a traditional manner (e.g., see pp. 290–294 in [9]). Balancing the external excitation with the cubic nonlinear terms, we estimate the leading order of \(\xi \) as \(O(\epsilon ^{1/3})\). Additionally, considering the contribution of viscous damping, we set the order of the damping ratio \(\mu _{\mathrm {c}}\) as \(O(\epsilon ^{2/3})\) by balancing the external excitation and damping terms. The balancing is carried out at \(O(\epsilon )\). In a similar way, the order of \(\eta \) is estimated as \(O(\epsilon ^{1/3})\). We rescale by substituting \(\epsilon ^{1/3}\) for \(\epsilon \) . Then, the leading order of \(\xi \) and \(\eta \) is \(O(\epsilon )\), the excitation amplitude of \(\delta _x\) is \(O(\epsilon ^3)\), and the damping ratio \(\mu _{\mathrm {c}}\) is \(O(\epsilon ^2)\). The first and third terms in Eqs. (4 and 5) are then estimated as \(O(\epsilon )\) and the other terms as \(O(\epsilon ^3)\) . Because the ratio between \(O(\epsilon )\) and \(O(\epsilon ^3)\) is \( \epsilon ^2 \), in the expansion for \(\xi \) and \(\eta \), the ratio of the leading term with \(O(\epsilon )\) and the succeeding second term should be \(O(\epsilon ^2)\). We therefore employ the asymptotic expansion as Eqs. (10 and 11). According to the above discussion, because the ratio of the fast and slow time scales, \(t_0\) and \(t_1\), should be \(\epsilon ^2\), we introduce \(t_2=\epsilon ^2 t\) and set the order of the detuning parameter \(\sigma \) to be \(O(\epsilon ^2)\) as in Eq. (13).
1.2 Analysis of the first order, \( O(\epsilon ) \)
By substituting Eqs. (10 and 11) in Eqs. (4 and 5), we obtain equations of the first-order term \( O(\epsilon ) \) for \( \xi \) and \( \eta \), respectively, as follows:
\( O(\epsilon ) \):
where \( D_0 \) is the derivative with respect to \( t_0 \). The prime symbol represents the derivative with respect to the dimensionless coordinate \( { z} \). The boundary conditions of the first-order term are expressed as:
1.3 Analysis of the third order, \( O(\epsilon ^3) \)
We also obtain equations of the third-order term \( O(\epsilon ^3) \) for \( \xi _3 \) and \( \eta _3 \), respectively, as follows:
\( O(\epsilon ^3) \):
where \( D_2 \) denotes the derivative with respect to \( t_2 \). The boundary conditions of the third-order term \( O(\epsilon ^3) \) are expressed as:
1.4 Derivation of the amplitude equations
According to Eqs. (61 and 62), the solutions of the first-order equations are expressed as:
where c.c. denotes the complex conjugate of the preceding term and \( \varPhi _{11} \) is determined by solving the boundary value problems
The solution of Eq. (69) with the boundary conditions of Eq. (70) for the first mode function is
We rewrite Eqs. (67 and 68) as
By considering the component with angular frequency \(\omega _1\), which resonates under the external excitation, the solutions of Eqs. (64 and 65) are expressed as:
By substituting Eqs. (67, 68, 74, and 75) in Eqs. (64 and 65), we have
where \( B_{1111} \) is
The associated boundary conditions are expressed as
The solvability conditions of Eqs. (76 and 77) for \( \varPhi _{3 \xi } \) and \( \varPhi _{3 \eta } \) are
To transform Eqs. (81 and 82) into an autonomous equation, we introduce \(A_0\) and \(B_0\) as
where \( A_0 (t_2) \) and \( B_0 (t_2) \) are the complex amplitudes. By substituting Eqs. (83 and 84) in Eqs. (81 and 82), respectively, we have
To make it possible to analyze also the trivial \( \eta \) [22], we set \( A_0 \) and \( B_0 \) as
By substituting Eqs. (87 and 88) in Eqs. (85 and 86), we rewrite Eqs. (85 and 86) as:
Multiplying Eqs. (89–92) by \( \epsilon ^3 \) and considering \(D_2\approx \epsilon ^{-2}d/dt\), we obtain the amplitude equations as
We therefore obtain Eqs. (16–19) as the amplitude equations.

Dimensionalized theoretical frequency response curves corresponding to the experimental frequency response curves shown in Fig. 11
Meanwhile, to obtain Eqs. (31–34), we substitute \( A_0 \) and \( B_0 \), expressed by
in Eqs. (85 and 86), and we rewrite Eqs. (85 and 86) as
Multiplying Eqs. (99–102) by \( \epsilon ^3 \) and considering \(D_2\approx \epsilon ^{-2}d/dt\), we obtain the amplitude equations as
We therefore obtain Eqs. (31–34) as amplitude equations.

Time histories of the displacement of the piezoelectric actuator in the case that \( \nu _d / 2 \pi = 40.2 \ \mathrm {Hz} \) and the nondimensional feedback gain (\( \alpha = 0.2 \))
Comparison of the frequency response curves in theoretical and experimental results
We quantitatively compare the theoretical and experimental frequency response curves for the x-direction. The comparison is being made without control. We obtain Fig. 15a by dimensionalizing Fig. 2 and compare it with Fig. 11. We first focus on the point C. For the theoretical frequency response curves of Fig. 15a, the dimensional \( \sigma _C \) is 0.098 Hz; at this point, the amplitude in the x-direction is 3.03 mm. For the experimental frequency response curves of Fig. 11, the corresponding values are 0 Hz and 1.23 mm. We next focus on the point D. For the theoretical frequency response curves of Fig. 15a, the dimensional \( \sigma _D \) is 0.423 Hz; at this point, the amplitude in the x-direction is 2.10 mm. For the experimental frequency response curves of Fig. 11, the corresponding values are 0.399 Hz and 0.56 mm. The frequencies at points C and D in the theory are almost same as the experimental frequencies, but there are discrepancies in the response amplitude of 2.5 times at point C and 3.8 times at point D as shown in Table 2. The explanation may be that the damping ratio (\( \mu \)) is not considered in the theoretical analysis and the tension of string due to initial tension changed during the experiments.
Displacement of the piezoelectric actuator
We show the displacement of piezoelectric actuator under control in the state that the out-of-plane motion is suppressed. The parameters are different from those in the previous experiments. We obtain the time histories when the excitation frequency \( \nu _d / 2 \pi = 40.2 \ \mathrm {Hz} \) and the feedback gain \( \alpha = 0.2 \) (Fig. 16a and b). We observe the reduction of oscillation in the y-direction. At this time, the displacement of piezoelectric actuator \( \eta (0,t) \) is shown as Fig. 16c. As seen from Eq. (44), if oscillation in the y-direction is stabilized to be zero, because the feedback is zero, \( \eta (0,t) \) should be zero. However, because the displacement and velocity in the y-direction do not become exactly zero, \( \eta (0,t) \) remains as in Fig. 16c.
Cross-sectional area of the string
The cross-sectional area of the string is shown in Fig. 17; the string consists of 49 cylindrical small wires with a diameter of \( 6.0 \times 10^{-5} \ \mathrm {m} \). We estimated the density of the string as \( \rho = 8.63 \times 10^3\ \mathrm {kg/m^3} \) by using the actual cross-sectional area of the string.

Cross-sectional area of the string for experiments. The string consists of 49 small cylindrical wires with a diameter of \( 6.0 \times 10^{-5} \ \mathrm {m} \). The black colored area is empty
Rights and permissions
About this article

Cite this article
Kim, S., Yabuno, H. Suppression of a nonplanar motion in an externally excited string by the addition of viscosity based on velocity feedback control. Nonlinear Dyn 104, 3205–3221 (2021). https://doi.org/10.1007/s11071-021-06485-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06485-1