
Abstract
This paper proposes two novel adaptive control designs for the feedback signals used in the control-based continuation paradigm to track families of periodic orbits of periodically excited dynamical systems, including black box simulation models and physical experiments. The proposed control designs rely on modifications to the classical model reference adaptive control framework and the more recent \({\mathscr {L}}_1\) adaptive control architecture, in which an additional low-pass filter is used to ensure guaranteed transient performance and robustness to time delays in the control input even in the limit of arbitrarily large adaptive gains. In contrast to the proportional control formulations that have been used in the literature on control-based continuation, the proposed control designs achieve stable performance with a minimum of parameter tuning. In the context of a class of linear systems with matched uncertainties, the paper demonstrates the successful integration of adaptive control feedback in control-based continuation. Specifically, the control designs are shown to ensure that the control input stabilizes the sought periodic orbits of the uncontrolled system and vanishes along these orbits, provided that an a priori unknown reference input is chosen appropriately. Numerical results obtained using the coco software package demonstrate how the combination of a nonlinear solver (Newton’s method) with the pseudo-arclength parameter continuation scheme can be used to trace the correct choice for the reference input under variations in an excitation parameter.
























Similar content being viewed by others
References
Åström, K.J., Wittenmark, B.: Adaptive Control. Courier Corporation, North Chelmsford (2013)
Barton, D.A.W.: Control-based continuation of a hybrid numerical/physical substructured system. In: Kerschen. G. (ed.) Nonlinear Dynamics, vol. 1. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-15221-9_19
Barton, D.A.: Control-based continuation: bifurcation and stability analysis for physical experiments. Mech. Syst. Signal Process. 84, 54–64 (2017)
Barton, D.A., Mann, B.P., Burrow, S.G.: Control-based continuation for investigating nonlinear experiments. J. Vib. Control 18(4), 509–520 (2012)
Bureau, E., Santos, I., Thomsen, J.J., Starke, J.: Experimental Bifurcation Analysis Using Control-Based Continuation. DTU Mechanical Engineering, New Delhi (2014)
Bureau, E., Santos, I.F., Thomsen, J.J., Schilder, F., Starke, J.: Experimental bifurcation analysis by control-based continuation: determining stability. In: ASME 2012 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 999–1006. American Society of Mechanical Engineers (2012)
Bureau, E., Schilder, F., Santos, I.F., Thomsen, J.J., Starke, J.: Experimental bifurcation analysis of an impact oscillator-tuning a non-invasive control scheme. J. Sound Vib. 332(22), 5883–5897 (2013)
Dankowicz, H., Schilder, F.: Recipes for Continuation, vol. 11. SIAM, Philadelphia (2013)
Desoer, C.: Slowly varying system \(\dot{x}=a(t)x\). IEEE Trans. Autom. Control 14(6), 780–781 (1969)
Dorobantu, A., Seiler, P., Balas, G.J.: Time-delay margin analysis for an adaptive controller. J. Guid. Control Dyn. 35(5), 1418–1425 (2012)
Gregory, I., Cao, C., Xargay, E., Hovakimyan, N., Zou, X.: L\(_1\) adaptive control design for nasa airstar flight test vehicle. In: AIAA guidance, Navigation, and Control Conference, p. 5738 (2009)
Hatwal, H., Mallik, A., Ghosh, A.: Forced nonlinear oscillations of an autoparametric system-part 1: periodic responses. J. Appl. Mech. 50(3), 657–662 (1983)
Hovakimyan, N., Cao, C.: \(\cal{L}_1\) Adaptive Control Theory: Guaranteed Robustness with Fast Adaptation. SIAM, Philadelphia (2010)
Ikeno, E., Ushida, A.: The arc-length method for the computation of characteristic curves. IEEE Trans. Circuits Syst. 23(3), 181–183 (1976)
Kharisov, E., Gregory, I., Cao, C., Hovakimyan, N.: \(\cal L\it _1\) adaptive control for flexible space launch vehicle and proposed plan for flight validation. In: AIAA Guidance, Navigation and Control Conference and Exhibit, p. 7128 (2008)
Krauskopf, B., Osinga, H.M., Galán-Vioque, J.: Numerical Continuation Methods for Dynamical Systems. Springer, Berlin (2007)
Lavretsky, E., Gibson, T.E.: Projection operator in adaptive systems (2011). arXiv preprint arXiv:1112.4232
Lavretsky, E., Wise, K.A.: State feedback direct model reference adaptive control. In: Robust and Adaptive Control. Advanced Textbooks in Control and Signal Processing. Springer, London (2013). https://doi.org/10.1007/978-1-4471-4396-3_9
Li, Y.: Adaptive control for enhanced performance of devices and algorithms. Ph.D. thesis. University of Illinois at Urbana-Champaign, Urbana, IL, USA (2019)
Li, Y., Dankowicz, H.: Adaptive control designs for control-based continuation in a class of uncertain discrete-time dynamical systems. J. Vib. Control 26(21–22), 2092–2109 (2020)
Lin, P., Wu, Y.: Identification of multi-input multi-output linear systems from frequency response data. J. Dyn. Syst. Meas. Control 104(1), 58–64 (1982)
Misra, S., Dankowicz, H., Paul, M.R.: Event-driven feedback tracking and control of tapping-mode atomic force microscopy. Proc. R. Soc. A Math. Phys. Eng. Sci. 464(2096), 2113–2133 (2008)
Narendra, K.S., Annaswamy, A.M.: Persistent excitation in adaptive systems. Int. J. Control 45(1), 127–160 (1987)
Nguyen, K.D.: Stability and robustness of adaptive controllers for underactuated Lagrangian systems and robotic networks. Ph.D. thesis. University of Illinois at Urbana-Champaign (2015)
Nguyen, K.D., Li, Y., Dankowicz, H.: Delay robustness of an \(\cal{L}_1 \) adaptive controller for a class of systems with unknown matched nonlinearities. IEEE Trans. Autom. Control 62(10), 5485–5491 (2017)
Nguyen, N., Summers, E.: On time delay margin estimation for adaptive control and robust modification adaptive laws. In: AIAA Guidance, Navigation, and Control Conference, p. 6438 (2011)
Nguyen, Q., Sreenath, K.: L\(_1\) adaptive control for bipedal robots with control Lyapunov function based quadratic programs. In: 2015 American Control Conference (ACC), pp. 862–867. IEEE (2015)
Ogata, K.: Modern Control Engineering. Prentice Hall, Upper Saddle River (2009)
Osborne, M.R.: On shooting methods for boundary value problems. J. Math. Anal. Appl. 27(2), 417–433 (1969)
Renson, L., Shaw, A., Barton, D., Neild, S.: Application of control-based continuation to a nonlinear structure with harmonically coupled modes. Mech. Syst. Signal Process. 120, 449–464 (2019)
Shinbrot, T., Grebogi, C., Yorke, J.A., Ott, E.: Using small perturbations to control chaos. Nature 363(6428), 411 (1993)
Sieber, J., Gonzalez-Buelga, A., Neild, S., Wagg, D., Krauskopf, B.: Experimental continuation of periodic orbits through a fold. Phys. Rev. Lett. 100(24), 244101 (2008)
Sieber, J., Krauskopf, B.: Control-based continuation of periodic orbits with a time-delayed difference scheme. Int. J. Bifurc. Chaos 17(08), 2579–2593 (2007)
Sieber, J., Krauskopf, B., Wagg, D., Neild, S., Gonzalez-Buelga, A.: Control-based continuation of unstable periodic orbits. J. Comput. Nonlinear Dyn. 6(1), 011005 (2011)
Sun, J.: Model reference adaptive control. In: Baillieul, J., Samad, T. (eds.) Encyclopedia of Systems and Control. Springer, London (2015). https://doi.org/10.1007/978-1-4471-5058-9_116
Swevers, J., Ganseman, C., Tukel, D.B., De Schutter, J., Van Brussel, H.: Optimal robot excitation and identification. IEEE Trans. Robot. Autom. 13(5), 730–740 (1997)
Vakakis, A., Nayfeh, T., King, M.: A multiple-scales analysis of nonlinear, localized modes in a cyclic periodic system. J. Appl. Mech. 60(2), 388–397 (1993)
Funding
This work is supported by Agriculture and Food Research Initiative Competitive Grant no. 2014-67021-22109 from the USDA National Institute of Food and Agriculture.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Bounded inputs
Recall the model reference adaptive control design from Sect. 2.2. As shown there, \(e=x-x_m\) and \({\tilde{\theta }}={\hat{\theta }}-\theta \) are bounded signals. Since this holds also for r and g, it follows from Eq. (11) and the fact that A is Hurwitz that \(x_m\) is bounded, and consequently, that x is bounded. Equation (9) then implies that u is bounded.
For the \({\mathscr {L}}_1\) adaptive control design in Sect. 2.3, the boundedness of x, \({\hat{x}}\), and u follows under an additional condition on the bandwidth k. Here, \({\hat{\eta }}(t)\triangleq {\hat{\theta }}^\top (t) x(t)\) and \({\hat{\theta }}\in {\mathscr {B}}\) imply that
for any \(\tau <\infty \) and some \(L>0\). It follows from (30) that
Next, let \(\zeta (t)\triangleq {\tilde{\theta }}^\top (t)r(t)\) and denote the Laplace transform of g(t) by g(s). It follows from Eq. (24) that
where \(G(s)\triangleq H(s)(1-C(s))\), \(H(s)\triangleq (s{\mathbb {I}}-A)^{-1}b\), and \(C(s)=k/(s+k)\). Substitution of (57) in (58) and reorganization yields
and the boundedness of \({\hat{x}}\) follows provided that k satisfies the stability condition
It is straightforward to show that this holds provided that k exceeds some threshold. In this case, the bound on \({\tilde{x}}\) implies the boundedness of x. Since \({\hat{\theta }}\) is bounded by construction, it follows that u is bounded.
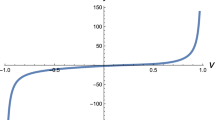
In the case of the linear system given by (34), the \({\mathscr {L}}_1\)-norm of G(s) as a function of the filter bandwidth k is shown in Fig. 25. With \({\mathscr {B}}={\mathscr {B}}(0,2)\), it follows that \(L=2\sqrt{2}\) and, consequently, that \(\Vert G(s)\Vert _{{\mathscr {L}}_1}\) must be less than \(1/(2\sqrt{2})\) for the stability condition to hold. In the main text, we use \(k=10\) for which \(\Vert G(s)\Vert _{{\mathscr {L}}_1}\approx 0.23\).
For the linear system given by (44), and with \({\mathscr {B}}={\mathscr {B}}(0,2)\), the stability condition again holds as long as \(\Vert G(s)\Vert _{{\mathscr {L}}_1}<1/(2\sqrt{3})\). With \(k=20\), \(\Vert G(s)\Vert _{{\mathscr {L}}_1}\approx 0.26\).

\({\mathscr {L}}_1\)-norm of G(s) as a function of the filter bandwidth k for the system defined in Eq. (34)
Transient performance
Suppose that k is chosen so that the stability condition (60) holds. The ideal dynamics of the \({\mathscr {L}}_1\) adaptive control design is represented by the nonadaptive reference system
It follows from the analysis below that
and
where
and \(H_1(s)\triangleq C(s)\frac{1}{{c}_0^\top H(s)}{c}_0^\top \) is a proper and BIBO stable transfer function for some \(c_0\) (whose existence follows from the controllability of the pair (A, b), cf. Lemma A.12.1 in [13]).
Indeed, in the frequency domain
where \({\tilde{\eta }}(s)\) is the Laplace transform of \({\tilde{\eta }}(t)\triangleq {\tilde{\theta }}(t)x(t)\). It follows that
The error dynamics in (26) now imply that
where \({\tilde{\zeta }}(s)\) is the Laplace transform of \({\tilde{\zeta }}(t)\triangleq {\tilde{\theta }}(t)r(t)\). By the triangle inequality,
and the first part of (63) follows since the upper bounds are independent of \(\tau \).
Similarly,
where
and the second part of (63) again follows since the upper bounds are independent of \(\tau \).
Finally, from (69), we obtain
where \(({\mathbb {I}}-G(s){\theta }^\top )^{-1}\) is stable. Since \(\lim _{s\rightarrow 0}s{\tilde{\eta }}(s)=\lim _{t\rightarrow \infty }{\tilde{\eta }}(t)=0\), the claims of asymptotic convergence in (64) follow from the final-value theorem.
The tightness of the bounds in (63) depends on the values of \(\varGamma \) and the radius R. As suggested in the main text, the \({\mathscr {L}}_1\) framework remains robust to time delays with arbitrarily large values of the adaptive gain \(\varGamma \), limited only by the available hardware. Similarly, an initially conservative estimate of R may be significantly reduced during control-based continuation, provided that \({\hat{\theta }}(t)\rightarrow \theta \) during the initial set of iterations of the Newton solver. Since \(x(t)\rightarrow 0\), it follows that \(x_\mathrm {ref}(0)\) is close to 0 in each subsequent iteration, ensuring that x(t) and u(t) remain close to 0 throughout the analysis.
Rights and permissions
About this article

Cite this article
Li, Y., Dankowicz, H. Adaptive control designs for control-based continuation of periodic orbits in a class of uncertain linear systems. Nonlinear Dyn 103, 2563–2579 (2021). https://doi.org/10.1007/s11071-021-06216-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06216-6