
Abstract
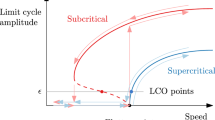
The aeroelastic system of an airfoil with a control surface usually encounters non-smooth nonlinearities such as freeplay. Freeplay can have a significant influence on aeroelastic behavior, such as reducing the flow velocity at which a limit cycle (LC) could abruptly arise. This means that a subcritical LC might occur much below the linear flutter velocity. It has been a difficult task for years to predict the lowest velocity for the onset of LC. Here, a simple yet efficient approach to this problem is proposed. This approach is based on eigenvalue analysis of a generalized Jacobian matrix (GJM), which is deduced according to the Filippov convex theory. With this method, the lowest velocity for the GJM having positive real parts can be calculated easily. More importantly, this method can be used to determine the lowest velocity above which a subcritical LC can occur, and it also appears that it can detect multiple subcritical LCs. In addition, the distribution of the positive real parts provides us with a convenient way to judge whether the arising LCs will be subcritical or supercritical. The point transform method and the Floquet theory are employed to validate the presented approach numerically, showing that good precision can be achieved for the estimated lowest velocity and the frequency of the arising LC. It leaves an open question for this method, as at the present stage a complete and rigorous proof is urgently needed.











Similar content being viewed by others

References
Dowell, E.H., Tang, D.: Nonlinear aeroelasticity and unsteady aerodynamics. AIAA J. 40, 1697–1707 (2002)
Liu, L., Dowell, E.H.: The secondary bifurcation of an aeroelastic airfoil motion: effect of high harmonics. Nonlinear Dyn. 37, 31–49 (2004)
Beran, P.S., Lucia, D.J.: A reduced order cyclic method for computation of limit cycles. Nonlinear Dyn. 39, 143–158 (2005)
Chen, Y.M., Liu, J.K.: Homotopy analysis method for limit cycle flutter of airfoils. Appl. Math. Comput. 203, 854–863 (2008)
Fazelzadeh, S.A., Mazidi, A.: Nonlinear aeroelastic analysis of bending-torsion wings subjected to a transverse follower force. J. Comput. Nonlinear Dyn. 6, 031016 (2011)
Dai, H.H., Yue, X.K., Yuan, J.P., Xie, D.: A fast harmonic balance technique for periodic oscillations of an aeroelastic airfoil. J. Fluid Struct. 50, 231–252 (2014)
Wang, C.C., Chen, C.L., Yau, H.T.: Bifurcation and chaotic analysis of aeroelastic systems. J. Comput. Nonlinear Dyn. 9, 021004 (2014)
Padmanabhan, M.A., Dowell, E.H.: Calculation of aeroelastic limit cycles due to localized nonlinearity and static preload. AIAA J. 55, 2762–2772 (2017)
Thompson, J.M.T., Stewart, H.B.: Nonlinear Dynamics and Chaos: Geometrical Methods for Engineers and Scientists (Chapter 7), pp. 116–117. Wiley, Hoboken (1986)
Ding, Q., Wang, D.L.: The flutter of an airfoil with cubic structural and aerodynamic non-linearities. Aerosp. Sci. Technol. 10, 427–434 (2006)
Price, S.J., Lee, B.H.K., Alighanbari, H.: Postinstability behavior of a two-dimensional airfoil with a structural nonlinearity. J. Aircr. 31, 1395–1401 (1994)
Conner, M.D., Tang, D.M., Dowell, E.H., Virgin, L.N.: Nonlinear behavior of a typical airfoil section with control surface freeplay: a numerical and experimental study. J. Fluid Struct. 11, 89–109 (1997)
Vasconcellos, R., Abdelkefi, A., Marques, F.D., Hajj, M.R.: Representation and analysis of control surface freeplay nonlinearity. J. Fluid Struct. 31, 79–91 (2012)
Park, Y.K., Yoo, J.H., Lee, I.: Nonlinear aeroelastic analysis of control with freeplay in transonic region. AIAA J. 45, 1142–1145 (2007)
Monfared, Z., Afsharnezhad, Z., Esfahani, J.A.: Flutter, limit cycle oscillation, bifurcation and stability regions of an airfoil with discontinuous freeplay nonlinearity. Nonlinear Dyn. 90, 1965–1986 (2017)
Liu, L.P., Dowell, E.H.: Harmonic balance approach for an airfoil with a freeplay control surface. AIAA J. 43, 802–816 (2005)
Li, D.C., Guo, S.J., Xiang, J.W.: Aeroelastic dynamic response and control of an airfoil section with control surface nonlinearities. J. Sound Vib. 329, 4756–4771 (2010)
Shukla, H., Patil, M.J.: Nonlinear state feedback control design to eliminate subcritical limit cycle oscillations in aeroelastic systems. Nonlinear Dyn. 88, 1599–1614 (2017)
Shukla, H., Patil, M.J.: Controlling limit cycle oscillation amplitudes in nonlinear aeroelastic systems. J. Aircr. 54, 1921–1932 (2017)
Guo, H.L., Cao, S.Q., Yang, T.Z., Chen, Y.S.: Aeroelastic suppression of an airfoil with control surface. Nonlinear Dyn. 94, 857–872 (2018)
Kholodar, D.B.: Nature of freeplay-induced aeroelastic oscillations. J. Aircr. 51, 571–583 (2014)
Sazesh, S., Shams, S.: Nonlinear aeroelastic analysis of an airfoil with control surface free-play using stochastic approach. J. Fluid Struct. 72, 114–126 (2017)
Padmanabhan, M.A., Dowell, E.H.: Gust response computations with control surface freeplay using random input describing functions. AIAA Journal 58(7), 2899–2908 (2020)
Liu, L., Wong, Y.S., Lee, B.H.K.: Application of the centre manifold theory in non-linear aeroelasticity. J. Sound Vib. 234, 641–659 (2000)
Chen, Y.M., Liu, J.K.: Supercritical as well as subcritical Hopf bifurcation in nonlinear flutter systems. Appl. Math. Mech. 29, 199–206 (2008)
Liu, L., Wong, Y.S., Lee, B.H.K.: Non-linear aeroelastic analysis using the point transformation method, part 1: freeplay model. J. Sound Vib. 253, 447–469 (2002)
Chung, K.W., Chan, C.L., Lee, B.H.K.: Bifurcation analysis of a two-degree-of-freedom aeroelastic system with freeplay structural nonlinearity by a perturbation-incremental method. J. Sound Vib. 320, 163–183 (2007)
Cui, C.C., Liu, J.K., Chen, Y.M.: Simulating nonlinear aeroelastic responses of an airfoil with freeplay based on precise integration method. Commun. Nonlinear Sci. Numer. Simul. 22, 933–942 (2015)
Dai, H.H., Yue, X.K., Yuan, J.P., Xie, D., Atluri, S.N.: A comparison of classical Runge–Kutta and Henon’s methods for capturing chaos and chaotic transients in an aeroelastic system with freeplay nonlinearity. Nonlinear Dyn. 81, 169–188 (2015)
Angulo, F., Olivar, G., Osorio, G.A., et al.: Bifurcations of non-smooth systems. Commun. Nonlinear Sci. Numer. Simul. 17, 4683–4689 (2012)
Bernardo, M.D., Budd, C.J., Champneys, A.R., et al.: Bifurcations in nonsmooth dynamical systems. SIAM Rev. 50, 629–701 (2008)
Leine, R.I., Nijmeijer, H.: Bifurcations of equilibria in non-smooth continuous systems. Phys. D Nonlinear Phenom. 223, 121–137 (2004)
Zou, Y., Kupper, T., Beyn, W.J.: Generalized Hopf bifurcation for planar Filippov systems continuous at the origin. J. Nonlinear Sci. 16, 159–177 (2006)
Chen, Y.M., Chen, D.H., Liu, J.K.: Subcritical limit cycle in aeroelastic system of an airfoil withfreeplay: prediction and mechanism analysis. AIAA J. 57, 4482–4489 (2019)
Lopes, L.D.W., Bueno, D.D., Dowell, E.H.: Influence of friction and asymmetric freeplay on the limit cycle oscillation in aeroelastic system an extended Hénon technique to temporal integration. J. Fluid Struct. 96, 103054 (2020)
Lee, B.H.K., Gong, L., Wong, Y.S.: Analysis and computation of nonlinear dynamic response of a two-degree-of-freedom system and its application in aeroelasticity. J. Fluid Struct. 11, 225–246 (1997)
Leine, R.I., Campen, D.H.V.: Bifurcation phenomena in non-smooth dynamical systems. Eur. J. Mech. 25, 595–616 (2006)
Acknowledgement
This work is supported by the National Natural Science Foundation of China (11672337), and Natural Science Foundation of Guangdong Province (2018B030311001).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
See Table 1.
Appendix B
Theodorsen constants
Appendix C
Some parameters used in the computation of the coefficient matrixes in Eq. (1)
Appendix D
Modal parameters used in the computation of the coefficient matrixes in Eq. (1)
The model mass \( m_{i} \) and the coupled natural frequency \( \omega_{i} \) are computed according to \( M_{s} \) and \( K_{s} \) by the following procedures [12]
-
(1)
Calculate eigenvalues \( \lambda_{i} \) and eigenvectors \( \Lambda \) from free vibration system \( M_{s} q^{\prime\prime} + K_{s} q = 0 \)
-
(2)
Let \( \omega_{i} = \sqrt {\lambda_{i} } \)
-
(3)
Define \( M_{mod} =\Lambda ^{\text{T}} M_{s}\Lambda \), and \( m_{i} \) is extracted from the diagonal entries of \( M_{mod} \).
In addition, the model damping matrix is defined as
and the structural damping matrix is given by \( B_{s} = (\Lambda ^{\text{T}} )^{ - 1} B_{mod}\Lambda ^{ - 1} \), which presents some parameters that will be used to get the coefficients matrixes in Eq. (1), such as
The modal damping coefficients, \( \varsigma_{1} \), \( \varsigma_{2} \) and \( \varsigma_{3} \), are adopted according to the experimental test of an airfoil-aileron structure made by Corner et al. [12]. Note that in the equations of motions, i.e., Equation (1), the damping matrix is not only dependent on the entries of \( B_{mod} \) but also on the aerodynamics modeled by the Theodorsen theory. More details can be referred to “Appendix E.”
Appendix E
The entries of the coefficient matrixes in Eq. (1)
Herein \( \psi_{1} = 0.165, \psi_{2} = 0.335 \), and \( \varepsilon_{1} = 0.0455, \varepsilon_{2} = 0.3 \).
Appendix F
The construction of the coefficient matrices and vectors in Eqs. (10–11)
First of all, both \( {\varvec{\Psi}}_{1} \) and \( {\varvec{\Psi}}_{2} \) are square matrix of dimension 12. The nonzero entries of \( {\varvec{\Psi}}_{1} \) are listed as follows: \( {\varvec{\Psi}}_{1} \left( {1,2} \right) = {\varvec{\Psi}}_{1} \left( {3,4} \right) = {\varvec{\Psi}}_{1} \left( {5,6} \right) = 1 \),
Importantly, \( {\varvec{\Psi}}_{2} \) is a special case of \( {\varvec{\Psi}}_{1} \) as \( M_{f} = 1 \). And both \( \varvec{\varphi }_{1} \) and \( \varvec{\varphi }_{2} \) are column vectors of dimension 12.
The matrices for \( {\mathbf{T}}_{1} \) and \( {\mathbf{T}}_{2} \) in Eq. (16).
First of all, \( {\mathbf{T}}_{1} \) and \( {\mathbf{T}}_{2} \) are square matrices of dimension 12. And, \( {\mathbf{T}}_{1} \) is a special case of \( {\varvec{\Psi}}_{1} \) when \( M_{f} = 0 \).
Rights and permissions
About this article

Cite this article
Chen, Y.M., Li, W.L., Yan, B.F. et al. Eigenvalue analysis for predicting the onset of multiple subcritical limit cycles of an airfoil with a control surface. Nonlinear Dyn 103, 327–341 (2021). https://doi.org/10.1007/s11071-020-06172-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-06172-7