
Abstract
We present a curvature tracking approach for a tractor-trailer wheeled mobile structure (TTWMS), such that the trailer can track a desired trajectory curve accurately. A key motion law related to the curvature functions of trajectory curves is discovered for the first time, in terms of the tractor and the trailer with nonholonomic constraints. Then, based on this key motion law, the target trajectory curve of the trailer is converted to a dynamical tracking target matching the dynamics equation of the TTWMS, so as to transform the original motion task into a common tracking control problem. Finally, LQR optimal control and integral sliding mode control are introduced to design a robust tracking controller for the TTWMS. Simulation results show that the proposed method can make the TTWMS follow a given target trajectory curve accurately, even if the forward and yaw rotational speed errors are divergent.










Similar content being viewed by others


References
Latif, A.R., Chalhoub, N., Pilipchuk, V.: Control of the nonlinear dynamics of a truck and trailer combination. Nonlinear Dyn. 99(4), 2505–2526 (2020)
Kayacan, E., Kayacan, E., Ramon, H., Saeys, W.: Nonlinear modeling and identification of an autonomous tractor-trailer system. Comput. Electron. Agric. 106, 1–10 (2014)
Khanpoor, A., Khalaji, A.K., Moosavian, S.A.A.: Modeling and control of an underactuated tractor-trailer wheeled mobile robot. Robotica 35(12), 2297–2318 (2017)
Binh, N.T., Tung, N.A., Nam, D.P., Quang, N.H.: An adaptive backstepping trajectory tracking control of a tractor trailer wheeled mobile robot. Int. J. Control Autom. Syst. 17(2), 465–473 (2019)
David, J., Manivannan, P.V.: Control of truck-trailer mobile robots: a survey. Intell. Serv. Robot. 7(4), 245–258 (2014)
Jujnovich, B.A., Cebon, D.: Path-following steering control for articulated vehicles. J. Dyn. Syst. Meas. Control. 135(3), 031006 (2013)
Yue, M., Hou, X.Q., Zhao, X.D., Wu, X.M.: Robust tube-based model predictive control for lane change maneuver of tractor-trailer vehicles based on a polynomial trajectory. IEEE Trans. Syst. Man Cybern. Syst. (2018). https://doi.org/10.1109/TSMC.2018.2867807
Yue, M., Wu, X.M., Guo, L., Gao, J.J.: Quintic polynomial-based obstacle avoidance trajectory planning and tracking control framework for tractor-trailer system. Int. J. Control Autom. Syst. 17(10), 2634–2646 (2019)
Shojaei, K.: Neural network formation control of a team of tractor-trailer systems. Robotica 36(1), 39–56 (2018)
Zhou, S.B., Zhao, H.C., Chen, W., Miao, Z.Q., Liu, Z., Wang, H.S., Liu, Y.H.: Robust path following of the tractor-trailers system in GPS-denied environments. IEEE Robot. Autom. Lett. 5(2), 500–507 (2020)
Kassaeiyan, P., Tarvirdizadeh, B., Alipour, K.: Control of tractor-trailer wheeled robots considering self-collision effect and actuator saturation limitations. Mech. Syst. Signal Process. 127, 388–411 (2019)
Yue, M., Hou, X.Q., Gao, R.J.: Trajectory tracking control for tractor-trailer vehicles: a coordinated control approach. Nonlinear Dyn. 91(2), 1061–1074 (2018)
Khalaji, A.K., Moosavian, S.A.A.: Robust adaptive controller for a tractor-trailer mobile robot. IEEE/ASME Trans. Mechatron. 19(3), 943–953 (2014)
Khalaji, A.K., Jalalnezhad, M.: Control of a tractor-trailer robot subjected to wheel slip. Proc. Inst. Mech. Eng. Part K J. Multi-body Dyn. 233(4), 956–967 (2019)
Alipour, K., Robat, A.B., Tarvirdizadeh, B.: Dynamics modeling and sliding mode control of tractor-trailer wheeled mobile robots subject to wheels slip. Mech. Mach. Theory 138, 16–37 (2019)
Leng, Z., Minor, M.A.: Curvature-based ground vehicle control of trailer path following considering sideslip and limited steering actuation. IEEE Trans. Intell. Transp. Syst. 18(2), 332–348 (2017)
Zhou, Y.S., Wen, X.R., Wang, Z.H.: On the nonholonomic constraints and motion control of wheeled mobile structures. Chin. J. Theor. Appl. Mech. 52(4), 1143–1156 (2020)
Prasad, A., Sharma, B., Vanualailai, J., Kumar, S.A.: A geometric approach to target convergence and obstacle avoidance of a nonstandard tractor-trailer robot. Int. J. Robust Nonlinear Control 30, 4924–4943 (2020)
He, Y., Islam, M.: An automated design method for active trailer steering systems of articulated heavy vehicles. J. Mech. Des. 134(4), 041002 (2012)
Odhams, A., Roebuck, R., Jujnovich, B., Cebon, D.: Active steering of a tractor-semi-trailer. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 225(7), 847–869 (2011)
Yuan, J., Sun, F.C., Huang, Y.L.: Hierarchical motion planning for multisteering tractor-trailer mobile robots with on-axle hitching. IEEE ASME Trans. Mechatron. 22(4), 1652–1662 (2017)
Yuan, J., Sun, F.C., Huang, Y.L.: Robust path following of the tractor-trailers system in GPS-denied environments. IEEE Robot. Autom. Lett. 5(2), 500–507 (2020)
Liu, Z.Y., Yue, M., Guo, L., Zhang, Y.S.: Trajectory planning and robust tracking control for a class of active articulated tractor-trailer vehicle with on-axle structure. Eur. J. Control. 54, 87–98 (2020)
Kassaeiyan, P., Alipour, K., Tarvirdizadeh, B.: A full-state trajectory tracking controller for tractor-trailer wheeled mobile robots. Mech. Mach. Theory 150, 103872 (2020)
Shojaei, K., Abdolmaleki, M.: Output feedback control of a tractor with N-trailer with a guaranteed performance. Mech. Syst. Signal Process. 142, 106746 (2020)
Galicki, M.: The planning of optimal motions of non-holonomic systems. Nonlinear Dyn. 90(3), 2163–2184 (2017)
Zhou, Y.S., Wang, Z.H., Chung, K.K.: Turning motion control design of a two-wheeled inverted pendulum using curvature tracking and optimal control. J. Optim. Theory Appl. 181(2), 634–652 (2019)
Zhou, Y.S., Wang, Z.H.: Robust motion control of a two-wheeled inverted pendulum with an input delay based on optimal integral sliding mode manifold. Nonlinear Dyn. 85(3), 2065–2074 (2016)
Defoort, M., Floquet, T., Kokosy, A., Perruquetti, W.: Integral sliding mode control for trajectory tracking of a unicycle type mobile robot. Integr. Comput. Aided Eng. 13(3), 277–288 (2006)
Acknowledgements
The authors would like to thank the Associate Editor and all anonymous reviewers for their valuable comments and suggestions which have improved the quality of this paper. This work has received the financial support of NSF of China under Grant (11802065, 11702227), the Science and Technology Program of Guizhou Province ([2018]1047), the fund Project of Key Laboratory of Advanced Manufacturing Technology, Ministry of Education, Guizhou University (KY[2018]478).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no potential conflict of interest with respect to the research, authorship, and/or publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Appendix A: Coefficient matrixes of Eq. (13)
where
1.2 Appendix B: Related expressions of Eq. (15)
where
1.3 Appendix C: Another proof of Eq. (24)
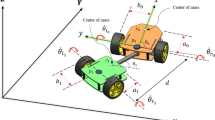
As can be seen in Fig. 1, the positional relationship of point Q and P can be expressed as
Taking the first and second derivatives of Eq. (45) with respect to t, respectively, one has
and
By substituting Eqs. (46) and (47) into Eq. (18), the forward speed and yaw rotation speed of point P can be given by
Similar to Eq. (4) of the tractor, and together with (18), the trailer also satisfies the following equations, described by
By substituting Eq. (49) into Eq. (48) results
which is exactly the same as Eq. (24).
Rights and permissions
About this article

Cite this article
Zhou, Y., Wen, X. & Xu, Q. Precise motion control of tractor-trailer wheeled mobile structures via a newly observed key motion law. Nonlinear Dyn 103, 833–848 (2021). https://doi.org/10.1007/s11071-020-06162-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-06162-9