
Abstract
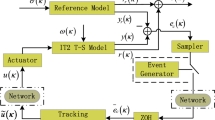
This paper is mainly concerned with the stabilization problem for nonlinear networked control systems (NCSs) with a two-terminal event-triggered mechanism. Firstly, Takagi–Sugeno (T–S) fuzzy models are introduced as the presentation of the nonlinear object. A two-terminal event-triggered mechanism, which adopts the relative event-triggered conditions as the communication mode of data transmission, is distributed in the controller-to-actuator link besides sensor-to-controller link in order to reduce congestion on network servers. By taking different membership function information from the T–S fuzzy model into account, the dynamic output feedback controller is designed under imperfect premise matching to construct closed-loop model. Secondly, to ensure the asymptotic stability of NCSs, valuable theorems are derived by defining Lyapunov functions which involve time-delay information. Thirdly, using boundary information of membership functions, LMI-based membership-function-dependent stability conditions are developed to reduce the conservativeness of the imperfect premise matching, from which the explicit form of controller gain matrices is obtained. Finally, one practical example illustrates the reliability of derived results.



















Similar content being viewed by others

References
Zhang, W., Branicky, M.-S., Phillips, S.-M.: Stability of networked control systems. IEEE Control Syst. 21(1), 84–99 (2001)
Zhivoglyadov, P.-V., Middleton, R.-H.: Networked control design for linear systems. Automatica 39(4), 743–750 (2003)
Montestruque, L.-A., Antsaklis, P.: Stability of model-based networked control systems with time-varying transmission times. IEEE Trans. Autom. Control. 49(9), 1562–1572 (2004)
Elahi, A., Alfi, A.: Finite-time \({H_\infty }\) stability analysis of uncertain network-based control systems under random packet dropout and varying network delay. Nonlinear Dyn. 91(1), 713–731 (2018)
Liu, J.-L., Zha, L.-J., Xie, X.-P., Tian, E.-G.: Resilient observer-based control for networked nonlinear T-S fuzzy systems with hybrid-triggered scheme. Nonlinear Dyn. 91(3), 2049–2061 (2018)
Yan, S., Shen, M.-Q., Zhang, G.-M.: Extended event-driven observer-based output control of networked control systems. Nonlinear Dyn. 86(3), 1639–1648 (2016)
Du, Z.-B., Kao, Y.-G., Karimi, H.-R., Zhao, X.-D.: Interval type-2 fuzzy sampled-data \({H_\infty }\) control for nonlinear unreliable networked control systems. IEEE Trans. Fuzzy Syst. (2019). https://doi.org/10.1109/TFUZZ.2019.2911490
Hespanha, J.-P., Naghshtabrizi, P., Xu, Y.: A survey of recent results in networked control systems. Proc. IEEE 91(1), 713–731 (2018)
Zhang, X.-M., Han, Q.-L.: A delay decomposition approach to \({H_\infty }\) control of networked control systems. Eur. J. Control 15(5), 523–533 (2009)
Jiang, X., Han, Q.-L., Liu, S., Xue, A.: A new \({H_\infty }\) stabilization criterion for networked control systems. IEEE Trans. Autom. Control 53(4), 1025–1032 (2008)
Bauer, N.-W., Maas, P.-J., Heemels, W.: Stability analysis of networked control systems: a sum of squares approach. Automatica 48(8), 1514–1524 (2012)
Zhao, T., Dian, S.-Y.: State feedback control for interval type-2 fuzzy systems with time-varying delay and unreliable communication links. IEEE Trans. Fuzzy Syst. 26(2), 951–965 (2018)
Huang, S.-J., Yang, G.-H.: Input-output based fault estimation for T–S fuzzy systems with local nonlinear parts. IEEE Trans. Fuzzy Syst. 25(5), 1320–1328 (2017)
Aslam, M.-S., Chen, Z.: Observer-based dissipative output feedback control for network T–S fuzzy systems under time delays with mismatch premise. Nonlinear Dyn. 95(4), 2923–2941 (2019)
Chang, X.-H.: Robust nonfragile \({H_\infty }\) filtering of fuzzy systems with linear fractional parametric uncertainties. IEEE Trans. Fuzzy Syst. 20(6), 1001–1011 (2012)
Xie, X.-P., Yue, D., Peng, C.: Relaxed real-time scheduling stabilization of discrete-time Takagi–Sugeno fuzzy systems via a alterable-weights-based ranking switching mechanism. IEEE Trans. Fuzzy Syst. 26(6), 3808–3819 (2018)
Xie, X.-P., Yue, D., Park, J.-H.: Observer-based state estimation of discrete-time fuzzy systems based on a joint switching mechanism for adjacent instants. IEEE Trans. Cybern. (2019). https://doi.org/10.1109/TCYB.2019.2917929
Xie, X.-P., Yue, D., Zhang, H., Xue, Y.: Control synthesis of discrete-time T–S fuzzy systems via a multi-instant homogenous polynomial approach. IEEE Trans. Cybern. 46(3), 630–640 (2016)
Li, X.-J., Yang, G.-H.: Fault detection in finite frequency domain for Takagi–Sugeno fuzzy systems with sensor faults. IEEE Trans. Cybern. 44(8), 1446–1458 (2013)
Li, C.-D., Gao, J.-L., Yi, J.-Q., Zhang, G.-Q.: Analysis and design of functionally weighted single-input-rule-modules connected fuzzy inference systems. IEEE Trans. Fuzzy Syst. 26(1), 56–71 (2016)
Wang, L.-K., Lam, H.-K.: A new approach to stability and stabilization analysis for continuous-time Takagi–Sugeno fuzzy systems with time delay. IEEE Trans. Fuzzy Syst. 26(4), 2460–2465 (2017)
Zhao, T., Chen, C.-S., Dian, S.-Y.: Local stability and stabilization of uncertain nonlinear systems with two additive time-varying delays. Commun. Nonlinear Sci. Numer. Simulat. (2019). https://doi.org/10.1016/j.cnsns.2019.105097
Zhao, T., Huang, M.-B., Dian, S.-Y.: Robust stability and stabilization conditions for nonlinear networked control systems with network-induced delay via T–S fuzzy model. IEEE Trans. Fuzzy Syst. (2019). https://doi.org/10.1109/tfuzz.2019.2955054
Zhao, T., Liu, J.-H., Dian, S.-Y.: Finite-time control for interval type-2 fuzzy time-delay systems with norm-bounded uncertainties and limited communication capacity. Inf. Sci. 483, 153–173 (2019)
Lin, C., Wang, Q.-G., Lee, T.-H., Chen, B.: \({H_\infty }\) filter design for nonlinear systems with time-delay through T–S fuzzy model approach. IEEE Trans. Fuzzy Syst. 16(3), 739–746 (2008)
Liu, J.-L., Wei, L.-L., Xie, X.-P., Tian, E.-G., Fei, S.-M.: Quantized stabilization for T–S fuzzy systems with hybrid-triggered mechanism and stochastic cyber-attacks. IEEE Trans. Fuzzy Syst. 26, 3820–3834 (2018)
Zhao, T., Huang, M.-B., Dian, S.-Y.: Stability and stabilization of T–S fuzzy systems with two additive time-varying delays. Inf. Sci. 494, 174–192 (2019)
Li, X., Zhou, Q., Li, P., Li, H., Lu, R.: Event-triggered consensus control for multi-agent systems against false data injection attacks. IEEE Trans. Cybern. (2019). https://doi.org/10.1109/TCYB.2019.2937951
Cao, L., Li, H., Dong, G., Lu, R.: Event-triggered control for multi-agent systems with sensor faults and input saturation. IEEE Trans. Syst. Man Cybern. Syst. 1, 2 (2019). https://doi.org/10.1109/TSMC.2019.2938216
Yan, H.-C., Xu, X.-L., Zhang, H., Yang, F.-W.: Distributed event-triggered \({H_\infty }\) state estimation for T–S fuzzy systems over filtering networks. J. Frankl. Inst. 354(9), 3760–3779 (2017)
Pan, Y., Yang, G.: Event-triggered fuzzy control for nonlinear networked control systems. Fuzzy Set. Syst. 329, 91–107 (2017)
Peng, C., Yang, M., Zhang, J., Fei, M., Hu, S.: Network-based \({H_\infty }\) control for T–S fuzzy systems with an adaptive event-triggered communication scheme. Fuzzy Set. Syst. 329, 61–76 (2017)
Shen, H., Li, F., Yan, H.-C.: Finite-time event-triggered \({H_\infty }\) control for T–S fuzzy markov jump systems. IEEE Trans. Fuzzy Syst. 26(5), 3122–3135 (2018)
Wu, Z.-G., Xu, Y., Pan, Y.-J.: Event-triggered control for consensus problem in multi-agent systems with quantized relative state measurements and external disturbance. IEEE Trans. Circuits-I 65(7), 2232–2242 (2018)
Gu, Z., Shi, P., Yue, D., Ding, Z.-T.: Decentralized adaptive event-triggered \({H_\infty }\) filtering for a class of networked nonlinear interconnected systems. IEEE Trans. Cybern. 49(5), 1570–1579 (2019)
Qiu, J.-B., Sun, K.-K., Wang, T., Gao, H.-J.: Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 27(11), 2152–2162 (2019)
Nowzari, C., Garcia, E., Cortes, J.: Event-triggered communication and control of networked systems for multi-agent consensus. Automatica 105, 1–27 (2019)
Li, Y.-M., Tong, S.-C., Li, T.-S.: Hybrid fuzzy adaptive output feedback control design for uncertain MIMO nonlinear systems with time-varying delays and input saturation. IEEE Trans. Fuzzy Syst. 24(4), 841–853 (2016)
Li, H.-Y., Gao, Y.-B., Shi, P.: Output-feedback control for T–S fuzzy delta operator systems with time-varying delays via an input-output approach. IEEE Trans. Fuzzy Syst. 23(4), 1100–1112 (2014)
Liu, Y., Wu, F., Ban, X.-J.: Dynamic output feedback control for continuous-time T–S fuzzy systems using fuzzy Lyapunov functions. IEEE Trans. Fuzzy Syst. 25(5), 1155–1167 (2017)
Guelton, K., Bouarar, T., Manamanni, N.: Robust dynamic output feedback fuzzy Lyapunov stabilization of Takagi–Sugeno systems—a descriptor redundancy approach. Fuzzy Sets Syst. 160(19), 2796–2811 (2009)
Dong, J., Yang, G.-H.: Dynamic output feedback control synthesis for continuous-time T–S fuzzy systems via a switched fuzzy control scheme. IEEE Trans. Cybern. 38(4), 1166–1175 (2008)
Wang, H.-O., Tanaka, K., Griffin, M.-F.: An approach to fuzzy control of nonlinear systems: stability and the design issues. IEEE Trans. Fuzzy Syst. 4(1), 14–23 (1996)
Lam, H.-K., Leung, F.H.F.: LMI-based stability and performance design of fuzzy control systems: fuzzy models and controllers with different premises. Neurocomputing 2006, 2027–2034 (2006)
Lam, H.-K., Narimani, M.: Stability analysis and performance design for fuzzy-model-based control system under imperfect premise matching. IEEE Trans. Fuzzy Syst. 17(4), 949–961 (2009)
Peng, C., Xie, X.-P., Wang, Y.-L.: Event-triggered predictive control for networked nonlinear systems with imperfect premise matching. IEEE Trans. Fuzzy Syst. 26(5), 2797–2806 (2018)
Postoyan, R., Tabuada, P.: A framework for the event-triggered stabilization of nonlinear systems. IEEE Trans. Autom. Control 60(4), 982–996 (2015)
Yan, H., Xu, X., Zhang, H., Yang, F.: Distributed event-triggered \({H_\infty }\) state estimation for T–S fuzzy systems over filtering networks. J. Frankl. Inst. 354(9), 3760–3779 (2017)
Wang, Y., Xie, L., Souza, C.E.D.: Robust control of a class of uncertain nonlinear systems. Syst. Control Lett. 19(2), 139–149 (1997)
Yue, D., Tian, E., Zhang, Y., Peng, C.: Delay-distribution-dependent stability and stabilization of T–S fuzzy systems with probabilistic interval delay. IEEE Trans. Cybern. 39(2), 503–516 (2009)
Tian, E., Yue, D.: Reliable \({H_\infty }\) filter design for T–S fuzzy model-based networked control;systems with random sensor failure. Int. J. Robust Nonlinear 23(1), 15–32 (2013)
Peng, C., Ma, S., Xie, X.-P.: Observer-based non-PDC control for networked T–S fuzzy systems with an event-triggered communication. IEEE Trans. Cybern. 47(8), 2279–2287 (2017)
Li, H.-Y., Pan, Y.-N., Shi, P., Shi, Y.: Switched fuzzy output feedback control and its application to a mass-spring-damping system. IEEE Trans. Fuzzy Syst. 24(6), 1259–1264 (2016)
Zhao, T., Dian, S.-Y.: Fuzzy dynamic output feedback \({H_\infty }\) control for continuous-time T–S fuzzy systems under imperfect premise matching. ISA Trans. 70, 248–259 (2017)
Tian, E., Yue, D., Gu, Z.: Robust \({H_\infty }\) control for nonlinear system over network: a piecewise analysis method. Fuzzy Sets Syst. 161(21), 2731–2745 (2010)
Jiang, X., Han, Q.-L.: On designing fuzzy controllers for a class of nonlinear networked control systems. IEEE Trans. Fuzzy Syst. 16(4), 1050–1060 (2008)
Shi, K.-B., Wang, J., Tang, Y.-Y., Zhong, S.-M.: Reliable asynchronous sampled-data filtering of T–S fuzzy uncertain delayed neural networks with stochastic switched topologies. Fuzzy Sets Syst. (2018). https://doi.org/10.1016/j.fss.2018.11.017
Shi, K.-B., Wang, J., Tang, Y.-Y., Zhong, S.-M.: Non-fragile memory filtering of T–S fuzzy delayed neural networks based on switched fuzzy sampled-data control. Fuzzy Sets Syst. (2019). https://doi.org/10.1016/j.fss.2019.09.001
Mathiyalagan, K., Park, J.-H., Sakthivel, R.: Observer-based dissipative control for networked control systems: a switched system approach. Complexity 21(2), 297–308 (2015)
Mathiyalagan, K., Park, J.-H., Sakthivel, R.: New results on passivity-based H control for networked cascade control systems with application to power plant boiler-turbine system. Nonlinear Anal. Hybrid Syst. 17, 56–69 (2015)
Acknowledgements
This work is supported by the National Natural Science Foundation of China (61703291).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
No potential conflict of interest was reported by the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Choose the following Lyapunov functional candidate as
where
and \(P > 0\), \({Q_m} > 0\), \({R_m} > 0\left( {m = 1,2} \right) \).
We obtain (24) as follow by taking the derivative of equations above
where
Notice that from \({{\dot{V}}_3}\left( t \right) \)
To unify the communication mechanism and the network mechanism under the same frame, \(\dot{V}\left( t \right) \mathrm{{ }}\) can be managed as follows.
Considering the conditions in event-triggered schemes (5) and (9) distributed in sensor-to-controller and controller-to-actuator respectively, we can obtain
For the purpose of eliminating the nonlinear integral terms in \({\dot{V}_3}\left( t \right) \), we apply the free-weighting matrix method [51] to obtain
where \({M_{ijmn}}\), \({N_{ijmn}}\), \({T_{ijmn}}\), \({S_{ijmn}}\) are matrices with appropriate dimensions, and
By Lemma 1, we can get
By combining (25)–(33), one obtains that
then, from (34), we have
Applying Lemma 2 and Schur complement, we can finally obtain the following inequalities to guarantee \(\dot{V}\left( t \right) < 0\).
In conclusion, there exists \({\Omega _{ijmn}}\left( s \right) < 0\), \(s = 1,2,3,4\), then the system (14) is asymptotically stable. The proof is completed.
Appendix B
The positive definite symmetric matrix P is decomposed as follows:
where \({P_1}\), \({P_2}\), \({P_3} \in {\mathbb {R}^{n \times n}}\).
Through Schur complement, \(P > 0\) is equivalent to \({P_3} > 0\) and \({P_1} - P_3^{ - 1} > 0\). Therefore, we use \(\hat{P} = \left[ {\begin{array}{*{20}{c}} {{P_3}}&{} * \\ I&{}{{P_1}} \end{array}} \right] > 0\) to guarantee \(P > 0\).
Define the matrix J
Define the matrix \(\Upsilon \)
Multiplying (18) by \(\Upsilon \) from the left side and its transpose from the right side.
Define
Then, we can derive that
where
Due to
we have
and
. Substitute \( - PR_m^{ - 1}P\), \( - \Omega _u^{ - 1}\) and \( - \Omega _y^{ - 1}\) with \( - 2P + {R_m}\), \( - 2I + {\Omega _u}\) and \( - 2I + {\Omega _y}\) into (39) respectively. we can obtain (40)
where
The following expression can be obtained:
Similar to [52], we have the slack matrix \({\widehat{\mathrm{{H}}}_i} = \widehat{\mathrm{{H}}}_i^T > 0\left( {i = 1,2,\ldots ,r} \right) \) with appropriate dimensions as follows
where \({{\hat{\mathrm{H}}}_i}\) are arbitrary matrices. Then, we have that
With \(m_j^0 - {\kappa _j}\omega _j^0 > 0\) for all \(j = 1,2,\ldots ,r\), equations (32)–(35) stand for that (41) is satisfied.
In order to deal with the unknown matrix \({P_2}\), we define the following parameters firstly:
Then we consider about linear transformations \({x_c}\left( t \right) = P_2^{ - 1}{\hat{x}_c}\left( t \right) \), and the dynamic output feedback controller model (12) is equivalent as
where the controller parameters can be obtained in an explicit form.
The proof is completed. \(\square \)
Rights and permissions
About this article

Cite this article
Zhang, K., Zhao, T. & Dian, S. Dynamic output feedback control for nonlinear networked control systems with a two-terminal event-triggered mechanism. Nonlinear Dyn 100, 2537–2555 (2020). https://doi.org/10.1007/s11071-020-05635-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-05635-1