
Abstract
Organism–environment positive feedback (i.e., ecosystem self-modification or facilitation) will incur bistability, which is often disadvantageous to biological conservation and ecosystem restoration. Using a spatially correlated equation based on pair approximation and simulation, we found that the feature of bistability in the positive feedback system strongly depends on spatial scale of organism–environment feedback. It will mitigate and even disappear when the interaction between organisms and environment is localized spatially, while the population will lessen globally when dispersal colonization is limited. As the spatially local influence is a basic property of real ecological systems (especially for sessile organisms), but classical ecological models based on mean-field assumption (or mass action) does not consider the impact of spatial scale. This implies that spatial configuration and local facilitation could be essential process for the stability and maintenance of ecosystem.
Similar content being viewed by others

1 Introduction
Some organisms can improve surrounding environments and thus enhance their survival and breeding success (Fig. 1). Such positive feedback between organism and environment is ubiquitous in real ecosystems. For example, trees and shrubs can promote rainwater infiltrating into deeper soil, so the moisture of soil around their roots is enhanced [1, 2]; grasses can reduce thermal amplitudes and protect ground surface from being eroded by wind and water, which prevent the loss of soil moisture [3, 4]; dune plants can reinforce their habitat on drift sand [5]; and the intertidal grass can modify shoreline environment and thus facilitate the establishment and persistence of plant communities [6]. In general, the positive feedback makes ecosystem become highly nonlinear and complicated.

The diagram of organism–environment positive feedback loop
Both empirical and theoretical studies have revealed that the organism–environment positive feedback can incur alternative stable states, meaning that there are two attracting states for the system (i.e., bistability) [7,8,9,10,11,12,13], which could account for the catastrophic ecosystem shifts [8, 14,15,16]. Although external conditions (e.g., climate, nutrient loading, biotic exploitation, or habitat fragmentation) change gradually, the ecosystem may shift abruptly [17]. In fact, many empirical studies have proved the appearance of catastrophic shift in communities. For example, shallow lakes transparency was suddenly lost and became turbid [18, 19]; reef ecosystems emerged phase shift because corals were overgrown caused by fleshy macroalgae [20, 21]; savannahs had a sudden drama shift due to bushes encroachment [22, 23]. Obviously, the catastrophic shifts are much more disadvantageous to conservation and restoration of the ecosystem [19, 24,25,26] and must be considered in policy provision and management [27, 28].
Because the availability and spatial distribution of suitable habitats significantly affect population persistence through changing local spatial clustering [29,30,31,32,33,34], the spatial distribution and dynamics of the population could play an important role in population persistence and ecosystem conservation [35,36,37]. However, few studies are concerned with the effect of spatial scale on alternative stable states and catastrophic shifts [38]. It is necessary to incorporate spatial scale into theoretical models in studying positive ecological feedback [39,40,41,42]. We here consider the scale-dependent positive feedback and address this issue through a spatially correlated model based on pair approximation and simulation [43,44,45]. We find that spatially limited interactions between external environment and organism are able to mitigate ecosystem bistability. This implies that spatial configuration and local facilitation could be an essential process for the stability and maintenance of population.
2 Models
2.1 Mean-field model
We here consider the organism–environment positive feedback in patchy environment (e.g., lattice space) consisting of suitable and unsuitable patches (Fig. 2). Suitable patches may be destructed due to human activities or natural causes and then become unsuitable, and in reverse, unsuitable patches could be restored by organism functioning (i.e., positive feedback). Accordingly, with mean-field assumption, we have the following ordinary differential equations to totally catch the dynamics of patchy states over time [13]:
where h is the probability that a randomly chosen patch is suitable (also explained as the density of suitable patches), and p the probability that a randomly chosen patch is occupied by focal organism (also explained as the density of occupied patches). Parameter c, e, and d represent colonization rate to empty suitable patches, extinction rate of local occupancy, and habitat destruction rate. The parameter \(\lambda \) and \(\mu \) are habitat restoration rates respectively by organism positive feedback (e.g., self-modification) and other external factors. The parameters are all nonnegative. Notably, the model (Eq. 1) only approximates the dynamical behavior of patchy states at regional scale, but does not catch spatial structure at local scale [13]. In order to study spatial-scale effects, we considered spatially local interaction by pair approximation method and simulation based on cellular automata in following two subsections [46, 47].

Diagram of modeling system from continuous real world to lattice model. Gray denotes suitable habitat, white denotes unsuitable habitat, and black denotes organism occupancy, which are represented by ‘0’, ‘−’, and ‘\(+\)’ in text, respectively
2.2 Pair approximation model
Spatially correlation equation with pair approximation (PA) has been widely used in the modeling of ecological and evolutionary process, which can describe approximately the dynamical change of adjacent patch pairs over time in the analytic way [43,44,45]. For the positive feedback system, because there are three possible states for each patch, either occupied patch by organism (denoted by +), or unoccupied suitable patch (denoted by 0), or unsuitable patch (denoted by −), only five state types of adjacent patch pairs are independent when we assume symmetry (i.e., pairwise patch state ij and ji are no difference where \(i, j = -, 0, +)\), and their dynamics can be given by the following ordinary differential equations [44, 47]:
Here, \(p_{ij }\) is the probability that a randomly chosen patch pair is in state ij, \(q_{k\left| {ij} \right. } \) is the conditional probability that a random chosen neighboring patch of i-patch in ij-patch pair is in state k. The parameter \(n_{1 }\) and \(n_{2}\) are the neighborhood sizes of colonization and restoration habitat of organism [48]. The former describes the colonization ability of the organism, and the later shows its influence range on external environment. If letting \(p_{i}\) represent the probability that a randomly chosen patch is in state i, in term of probability theory, we have the following equalities: \(p_{--} +p_{-0} +p_{-+} =p_- \), \(p_{0-} +p_{00} +p_{0+} =p_0 \), \(p_{+-} +p_{+0} +p_{++} =p_+ \), and \(p_- +p_0 +p_+ =1\). We must indicate that Eq. 2 is not closed because the dynamics of the patch pairs depend on patch triplets since \(q_{k\left| {ij} \right. } =p_{kij} /p_{ij} \). In this case, a generally used approximation method (i.e., pair approximation) is to assume the probability of finding a k-patch in the neighborhood of i-patch does not depend on its other neighbors (i.e., \(q_{k\left| {ij} \right. } =q_{k\left| i \right. } )\), and then Eq. 2 is rewritten as
Thus all conditional probabilities (also explained as local density) can be calculated in term of probability theory \(p_{ij} =p_i q_{j\left| i \right. } \), and Eq. 3 becomes a closed system[44, 47]. In particular, when \(n_1 \rightarrow \infty \) and \(n_2 \rightarrow \infty \) (mean-field assumption), the pair approximation model (Eq. 2) will return to the mean-field model (Eq. 1) with \(p=p_+ \) and \(h=p_0 +p_+ \).
In the pair approximation model, the three types of patches (\(-, 0\) and \(+\)) are discrete. We cannot simply distinguish these three states in the ecosystem because there are still transitional states between these three states in reality. This is the limitation of the pair approximation model.
2.3 Cellular automata simulation
Furthermore, a cellular automata model can be built to simulate the spatial positive feedback system on lattice space. We here identify five possible types of patchy state transition (Table 1): occupied patches will extinct (+\(\rightarrow \)0) at rate e or be destroyed \((+\rightarrow -)\) at rate d; empty suitable patches will also be destroyed \((0\rightarrow -)\) at rate d or be reoccupied (0\(\rightarrow \)+) at rate \(c{\bar{p}}_1 \) where \({\bar{p}}_1 \) is the fraction of occupied patches in its neighborhoods; and unsuitable patches will be modified and become suitable \((-\rightarrow 0)\) at rate \(\lambda {\bar{p}}_2 +\mu \) where \({\bar{p}}_2 \) is the fraction of occupied patches in its neighborhoods. We adopted periodic boundary condition and asynchronous update in our simulations [49].
The three models are all based on patchy environment (e.g., lattice space), which could result from discretizing continuous space in real world (Fig. 2). The mean-field model is most parsimony, but it assumes no difference between local density and global density. The pair approximation model considers the spatial-scale dependence of ecological processes and emphasizes the difference and relationship between local and global dynamics. The cellular automata simulation can further catch demographic stochastics and spatial heterogeneity. In this study using the above model system, we investigated how the spatial scale of organism–environment positive feedback affect alternative stable states (i.e., bistability).

Effect of restoration neighborhood sizes ( \({\textit{n}}_{{2}}\)) on alternative stable states (i.e., bistability). The bifurcation diagrams resulted from pair approximation model (Eq. 3). Solid lines are stable equilibriums and dashed lines unstable equilibriums. The parameters are \(c=1\), \(e=0.1\), \(n_{1}=4v\)
3 Results
Organism–environment positive feedback accounts for alternative stable states. When the bistability occurs, one of the two stable states is always zero (i.e., extinction state). This means that initial rare population are unable to spread about and will die out finally, that is, it cannot invade the empty habitat space successfully. Therefore, according to the invasion analysis, the necessary condition for alternative stable states can be derived. Specifically, from the mean-field model (Eq. 1) the necessary condition of bistability was obtained easily:
while from pair approximation model (Eq. 3) it was also obtained with a complicated form as follows (see Appendix for details):
where \(\delta =(e+d)/c\), \(\alpha =\lambda /d\), \(\beta =\mu /d\), \(\gamma =e/d\). In particular, when \(n_1 \rightarrow \infty \) and \(n_2 \rightarrow \infty \) (mean-field assumption), inequality (5) will become inequality (4).
Bifurcation diagram based on pair approximation model (Eq. 3), drawn by the software MATCONT [50], showed that both colonization ability of the organism (\(n_{1})\) and its influence range on external environment (\(n_{2})\) would profoundly affect the bistability caused by the positive feedback. Decreasing restoration neighborhood size (\(n_{2})\) will mitigate the bistable phenomenon, not only extinction threshold decreases but also bistable range shrinks (Fig. 3). On the contrary increasing colonization neighborhood size (\(n_{1})\) will diminish bistable phenomenon slightly as well as increase population size (Fig. 4). In particular, higher external restoration (\(\mu \)) can make the bistability vanish. These results are robust because they are independent of the change of other model parameters. For example, the bistable domain of model parameters including c, e, d, \(\lambda \) and \(\mu \) becomes small with decreasing restoration neighborhood size \(n_{2}\) (Fig. 5).

Effect of colonization neighborhood sizes ( \({\textit{n}}_{{1}}\)) on alternative stable states (i.e., bistability). The bifurcation diagrams resulted from pair approximation model (Eq. 3). Solid lines are stable equilibriums and dashed lines unstable equilibriums. The parameters are \(c=1\), \(e=0.1\), \(n_{2}=4\)

Effect of restoration neighborhood sizes (\({\textit{n}}_{{2}}\)) on the bistable domain of parameters (dark area). The phase diagrams were based on pair approximation model (Eq. 3). Parameters were assigned as \(e=0.1\) and \(\mu =0.03\) for a \(e =0.1\) and \(\lambda =0.4\), for b\(\lambda =0.4\) and \(\mu =0.03\), for c and \(c =1\) and \(n_{1}=5\) for all panels
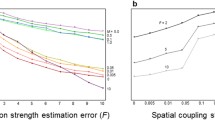
The cellular automata simulation totally confirmed the above results predicted by pair approximation model. The domain of initial occupancy density which cannot make population persist will become large with increasing restoration neighborhood size (\(n_{2})\) for fixed parameter \(n_{1}\) (see Fig. 6a–c), but become small with increasing colonization neighborhood size (\(n_{1})\) for fixed parameter \(n_{2}\) (see Fig. 6c–e). Notably, our simulation results still have some differences from the results predicted by deterministic approach (Eq. 3). Instead of the threshold phenomenon predicted by the differential equation (i.e., whether population persists or becomes extinct completely depends on initial occupancy), our simulations showed that the extinction probability of population was a decreasing function with regards to initial occupancy density. This could be incurred by demographic stochastics in our simulations.

Relationship between extinction probability and initial occupancy density. Black lines resulted from the cellular automata simulations, and gray lines from pair approximation model (Eq. 3). The simulations ran on \(30\times 30\) lattice space. The parameters were assigned as \(c=0.78\), \(e=0.1\), \(d=0.1\), \(\lambda =0.8\), \(\mu =0.0001\)
In summary, locally confined organism–environment interaction and globally colonization could mitigate and even eliminate bistable phenomenon caused by positive feedback, and thus be beneficial for the persistence and restoration of ecosystem instead of catastrophic shift. This result implies that the spatial scale of organism–environment feedback plays a non-negligible role in ecosystem.
4 Discussion
In recent years, evidence of studies suggests that positive feedback play crucial roles in many communities [51], and alternative stable states (discontinuous transition) often exist in ecosystems [25, 52]. More empirical evidences indicated the importance of positive feedback loop for alternative stable states. For example, there are two alternative stable states in drylands: vegetated and bare soil. More vegetation can improve the infiltration and retention of water and help to establish better growth conditions. On the contrary, less vegetation makes the soil lack the physical protection of vegetation, which leads to soil erosion and crusting. Thus, worse growth conditions are established and bare soil is easy to form [53, 54]. Another classic example is the alternative stable states of clarity and turbidity in shallow lakes. Many submerged plants can absorb more nutrients through photosynthesis, so phytoplankton decreases and the water becomes clear. Conversely, when the number of submerged plants is less, the water becomes turbid because nutrient loading is external [19]. Moreover, many theoretical studies also already revealed that if the organism–environment positive feedback are strong enough, alternative stable states are possible [13, 40, 46, 55,56,57], including the mean-field model and the model with spatial structure.
Though the positive feedback can incur alternative stable states, but there has been much work trying to use positive feedback to restore systems with alternative stable states [58, 59]. For example, in shallow lakes, the number of Zooplankton increases through reducing the abundance of benthic fishes. Since Zooplankton predates on phytoplankton, this reduces the turbidity of water and increase the light for submerged plants [60]. In degraded semiarid ecosystems, original shrublands and forests may be restored by ‘nurse plant’ [61]. And theoretical models of alternative stable states that incorporate system positive feedbacks are now being applied to the dynamics of recovery in degraded systems [59].
In this paper, the scale-dependent positive feedback system, which presented by Rietkerk et al. [38], is considered. We mainly discuss the effect of scale-dependent positive feedback on the bistability (discontinuous transition) in organism–environment. Furthermore, Kéfi et al. have also raised the question of when positive feedback may lead to discontinuous transition [55]. So it is particularly important for early warning of this discontinuous transition [62]. Since positive feedback is an element of the threshold (tipping point) of discontinuous transition, the transition from one state to another is very sudden at the threshold (tipping point). If the threshold (tipping point) of the complex system can be found, it is possible that the ecosystem will avoid this discontinuous transition and have the opportunity to change in a positive direction [63].
In addition, we find these thresholds (tipping points) for the different models (i.e., the pair approximation model and simulation) are different (Fig. 6). We cannot accurately find this threshold (tipping point) to alert discontinuous transition because simulation has randomness. In pair approximation model, we can find this threshold (tipping point) more accurately and provide early warning for the system, thus providing better guidance for the management of the ecosystem. However, under the assumption of mean field, this system have the characteristics of homogeneity and high connectivity, which provides resistance to the alternative states transition of the system until the system reaches the threshold (tipping point) [64]. Therefore, although this threshold (tipping point) is lowered, it is possible to provide an erroneous early warning. This is because the spatial structure is ignored in the mean-field model, so that it does not conform to the real world system.
Since the effect of the neighborhood sizes of colonization and restoration habitat of organism on the population is just the opposite. Therefore, when the impact of individual organisms on the environment is restored at fine scale (i.e., small \(n_{2})\), and the individual must disperse as much as possible (i.e., large \(n_{1})\), the system must be able to resist the bistable phenomenon. In addition, bistability also depends on the initial value [65]. Population with lower density is less prone to disperse, but population with higher density tends to disperse [56]. If the initial value of population is large, the bistable phenomenon may be avoided.
In fact, positive feedback among multiple organisms is more common in ecosystems. In a more complex system, the influence of this spatial-scale-dependent positive feedback on populations is worth further discussion and research. And the integration of ecological factors in research is very important, which also provides potential interest and direction for future theoretical researchers.
References
Bhark, E.W., Small, E.E.: Association between plant canopies and the spatial patterns of infiltration in shrubland and grassland of the Chihuahuan Desert, New Mexico. Ecosystems 6, 185–196 (2003)
D’Odorico, P., Caylor, K., Okin, G.S., Scanlon, O.: On soil moisture-vegetation feedbacks and their possible effects on the dynamics of dryland ecosystems. J. Geophys. Res. Biogeosci. 112(G4), 231–247 (2007)
Callaway, R.M., Walker, L.R.: Competition and facilitation: a synthetic approach to interactions in plant communities. Ecology 78(7), 1958–1965 (1997)
Greene, R.S.B., Valentin, C., Esteves, M.: Runoff and erosion processes. In: Tongway, D.J., Valentin, C., Seghieri, J. (eds.) Banded Vegetation Patterning in Arid and Semiarid Environments. Ecological Processes and Consequences for Management, pp. 52–76. Springer, Berlin (2001)
Zarnetske, P.L., Hacker, S.D., Seabloom, E.W., Ruggiero, P., Killian, J.R., Maddux, T.B., Cox, D.: Biophysical feedback mediates effects of invasive grasses on coastal dune shape. Ecology 93(6), 1439–1450 (2012)
Bruno, J.F.: Facilitation of cobble beach plant communities through habitat modification by Spartina alterniflora. Ecology 81(5), 1179–1192 (2000)
Dakos, V., Kéfi, S., Rietkerk, M., van Nes, E.H., Scheffer, M.: Slowing down in spatially patterned ecosystems at the brink of collapse. Am. Nat. 177(6), E153–166 (2011)
Hare, S.R., Mantua, N.J.: Empirical evidence for North Pacific regime shifts in 1977 and 1989. Prog. Oceanogr. 47, 103–145 (2000)
Okin, G.S., D’Odorico, P., Archer, S.: Impact of feedbacks on the stability of Chihuahuan desert grasslands. J. Geophys. Res. 114, G01004 (2009). https://doi.org/10.1029/2008JG000833
Qin, L.-J., Zhang, F., Wang, W.-X., Song, W.-X.: Interaction between Allee effects caused by organism-environment feedback and by other ecological mechanisms. PLoS ONE 12(3), e0174141 (2017)
Ratajczak, Z., Nippert, J.B., Ocheltree, T.W.: Abrupt transition of mesic grassland to shrubland: evidence for thresholds, alternative attractors, and regime shifts. Ecology 95, 2633–2645 (2014)
Sieber, J., Krauskopf, B.: Control based bifurcation analysis for experiments. Nonlinear Dyn. 51(3), 365–377 (2008)
Zhang, F., Tao, Y., Hui, C.: Organism-induced habitat restoration leads to bi-stability in metapopulations. Math. Biosci. 240(2), 260–266 (2012)
Dakos, V., Nes, E.H.V., Donangelo, R., Fort, H., Scheffer, M.: Spatial correlation as leading indicator of catastrophic shifts. Theor. Ecol. 3(3), 163–174 (2010)
Scheffer, M., Carpenter, S.R.: Catastrophic regime shifts in ecosystems: linking theory to observation. Trends Ecol. Evol. 18(12), 648–656 (2003)
Scheffer, M.: Ecology of Shallow Lakes. Springer, Netherlands (2004)
Scheffer, M., Carpenter, S., Foley, J.A., Folke, C., Walker, B.: Catastrophic shifts in ecosystems. Nature 413(6856), 591–596 (2001)
Carpenter, S.R., Ludwig, D., Brock, W.A.: Management of eutrophication for lakes subject to potentially irreversible change. Ecol. Appl. 9, 751–771 (1999)
Scheffer, M., Hosper, S.H., Meijer, M.L., Moss, B.: Alternative equilibria in shallow lakes. Trends Ecol. Evol. 8, 275–279 (1993)
Knowlton, N.: Thresholds and multiple stable states in coral reef community dynamics. Am. Zool. 32, 674–682 (1992)
McCook, L.J.: Macroalgae, nutrients and phase shifts on coral reefs: scientific issues and management consequences for the Great Barrier Reef. Coral Reefs 18, 357–367 (1999)
Ludwig, D., Walker, B., Holling, C.S.: Sustainability, stability and resilience. Publishing Conservation Ecology Web. http://www.consecol.org/vol1/iss1/art7 (1997). Accessed 10 Aug 2016
Walker, B.H.: Rangeland ecology: understanding and managing change. Ambio. 22, 80–87 (1993)
Dublin, H.T., Sinclair, A.R., McGlade, J.: Elephants and fire as causes of multiple stable states in the Serengeti–Mara woodlands. J. Anim. Ecol. 59, 1147–1164 (1990)
Jiang, J., Shi, J.: Spatial Ecology. In: Stephen, C., Chris, C., Ruan, S.-G. (eds.) Bistability Dynamics in some Structured Ecological Models, pp. 33–62. Chapman & Hall, Boca Raton (2009)
Rietkerk, M., Van den Bosch, F., Van de Koppel, J.: Site-specific properties and irreversible vegetation changes in semi-arid grazing systems. Oikos 80, 241–252 (1997)
Bruno, J.F., Stachowicz, J.J., Bertness, M.: Inclusion of facilitation into ecological theory. Trends Ecol. Evol. 18, 119–125 (2003)
Hooper, D.U., Chapin, F.S., Ewel, J.J., Hector, A., Inchausti, P., Lavorel, S., Lawton, J.H., Lodge, D.M., Loreau, M., Naeem, S., Schmid, B., Setälä, H., Symstad, A.J., Vandermeer, J., Wardle, D.A.: Effects of biodiversity on ecosystem functioning: a consensus of current knowledge. Ecol. Monogr. 75, 3–35 (2005)
Gamarra, J.G.: Metapopulations in multifractal landscapes: on the role of spatial aggregation. Proc. R. Soc. B 272, 1815–1822 (2005)
Hiebeler, D.: Populations on fragmented landscapes with spatially structured heterogeneities: landscape generation and local dispersal. Ecology 81, 1629–1641 (2000)
Hiebeler, D.: Competition between near and far dispersers in spatially structured habitats. Theor. Popul. Biol. 66, 205–218 (2004)
Hiebeler, D.: Spatially correlated disturbances in a locally dispersing population model. Theor. Biol. 232, 143–149 (2005b)
Matlack, G.R., Monde, J.: Consequences of low mobility in spatially and temporally heterogeneous ecosystems. J. Ecol. 92, 1025–1035 (2004)
Ovaskainen, O., Sato, K., Bascompte, J., Hanski, I.: Metapopulation models for extinction threshold in spatially correlated landscapes. J. Theor. Biol. 215, 95–108 (2002)
Hanski, I.: A practical model of metapopulation dynamics. J. Anim. Ecol. 63, 151–162 (1994a)
Hiebeler, D.E., Morin, B.R.: The effect of static and dynamic spatially structured disturbances on a locally dispersing population. J. Theor. Biol. 246, 136–144 (2007)
MacPherson, J.L., Bright, P.W.: Metapopulation dynamics and a landscape approach to conservation of lowland water voles (Arvicola amphibius). Landsc. Ecol. 26, 1395–1404 (2011)
Rietkerk, M., Dekker, S.C., de Ruiter, P.C., Van de Koppel, J.: Self-organized patchiness and catastrophic shifts in ecosystems. Science 305(5692), 1926–1929 (2004)
Benedetti-Cecchi, L.: Variability in abundance of algae and invertebrates at different spatial scales on rocky sea shores. Mar. Ecol. Prog. 215(8), 79–92 (2001)
Kéfi, S., Rietkerk, M., Alados, C.L., Pueyo, Y., Papanastasis, V.P., Elaich, A., de Ruiter, P.C.: Spatial vegetation patterns and imminent desertification in mediterranean arid ecosystems. Nature 449(7159), 213–217 (2007)
Van Kooten, T., de Roos, A.M., Persson, L.: Bistability and an Allee effect as emergent consequences of stage-specific predation. J. Theor. Biol. 237(1), 67–74 (2005)
Wearing, H.J., Sait, S.M., Cameron, T.C., Rohani, P.: Stage-structured competition and the cyclic dynamics of host-parasitoid populations. J. Anim. Ecol. 73(4), 706–722 (2004)
Iwasa, Y.: Lattice models and pair approximation in ecology. In: Diekmann, U., Law, R., Metz, J.A.J. (eds.) The Geometry of Ecological Interactions. Simplifying Spatial Complexity, pp. 227–251. Cambridge University Press, Cambridge (2000)
Sato, K., Iwasa, Y.: Pair approximation for lattice-based ecological models. In: Diekmann, U., Law, R., Metz, J.A.J. (eds.) The Geometry of Ecological Interactions. Simplifying Spatial Complexity, pp. 341–358. Springer, Cambridge (2000)
Van Baalen, M.: Pair approximation for different spatial geometries. In: Diekmann, U., Law, R., Metz, J.A.J. (eds.) The Geometry of Ecological Interactions: Simplifying Spatial Complexity, pp. 359–387. Cambridge University Press, Cambridge (2000)
Ke’fi, S., Rietkerk, M., van Baalen, M., Loreau, M.: Local facilitation, bistability and transitions in arid ecosystems. Theor. Popul. Biol. 71, 367–379 (2007)
Zhang, F., Tao, Y., Li, Z.-Z., Hui, C.: The evolution of cooperation on fragmented landscapes: the spatial Hamilton rule. Evol. Ecol. Res. 12(1), 23–33 (2010)
Zhang, F., Li, Z.-Z., Hui, C.: Spatiotemporal dynamics and distribution patterns of cyclic competition in metapopulation. Ecol. Model. 193(3), 721–735 (2006)
Ingerson, T.E., Buvel, R.L.: Structure in asynchronous cellular automata. Phys. D 10, 59–68 (1984)
Kouznetsov I.A.: http://sourceforge.net/projects/matcont (2014). Accessed 26 Sep 2014
Bertness, M.D., Leonard, G.H.: The role of positive interactions in communities: lessons from intertidal habitats. Ecology 78(7), 1976–1989 (1997)
Beisner, B.E., Haydon, D.T., Cuddington, K.: Alternative stable states in ecology. Front. Ecol. Environ. 1, 376–382 (2003)
Schlesinger, W.H., Reynolds, J.F., Cunningham, G.L., Huenneke, L.F., Jarrell, W.M., Virginia, R.A., Whitford, W.G.: Biological feedbacks in global desertification. Science 247(4946), 1043–1048 (1990)
Holmgren, M., Scheffer, M.: El Niño as a window of opportunity for the restoration of degraded arid ecosystems. Ecosystems 4(2), 151–159 (2001)
Kéfi, S., Holmgren, M., Scheffer, M.: When can positive interactions cause alternative stable states in ecosystems? Funct. Ecol. 30(1), 88–97 (2016)
Ratzke, C., Gore, J.: Self-organized patchiness facilitates survival in a cooperatively growing Bacillus subtilis population. Nat. Microbiol. 1, 16022 (2016)
Sun, G.-Q., Li, L., Zhang, Z.-K.: Spatial dynamic of a vegetation model in an arid flat environment. Nonlinear Dyn. 73(4), 2207–2219 (2013)
Byers, J.E., Cuddington, K., Jones, C.G., Talley, T.S., Hastings, A., Lambrinos, J.G., Crooks, J.A., Wilson, W.G.: Using ecosystem engineers to restore ecological systems. Trends Ecol. Evol. 21(9), 493–500 (2006)
Suding, K.N., Gross, K.L., Houseman, G.R.: Alternative states and positive feedbacks in restoration ecology. Trends Ecol. Evol. 19(1), 46–53 (2004)
Søndergaard, M., Jeppesen, E., Lauridsen, T.L., Skov, C., Van Nes, E.H., Roijackers, R., Lammens, E., Portielje, R.O.B.: Lake restoration: successes, failures and long-term effects. J. Appl. Ecol. 44(6), 1095–1105 (2007)
Gómez-Aparicio, L.: The role of plant interactions in the restoration of degraded ecosystems: a meta-analysis across life-forms and ecosystems. J. Ecol. 97(6), 1202–1214 (2009)
Wang, R., Dearing, J.A., Langdon, P.G., Zhang, E., Yang, X.-D., Dakos, V., Scheffer, M.: Flickering gives early warning signals of a critical transition to a eutrophic lake state. Nature 492(7429), 419–422 (2012)
Angeli, D., Ferrell, J.E., Sontag, E.D.: Detection of multistability, bifurcations, and hysteresis in a large class of biological positive-feedback systems. Proc. Natl. Acad. Sci. 101(7), 1822–1827 (2004)
Scheffer, M., Carpenter, S.R., Lenton, T.M., Bascompte, J., Brock, W., Dakos, V., Van de Koppel, J., Van de Leemput, I.A., Levin, S.A., Van Nes, E.H., Pascual, M., Vandermeer, J.: Anticipating critical transitions. Science 338(6105), 344–348 (2012)
Harada, Y., Iwasa, Y.: Lattice population dynamics for plants with dispersing seeds and vegetative propagation. Res. Popul. Ecol. 36(2), 237–249 (1994)
Acknowledgements
We are grateful to two anonymous reviewers for their helpful comments. This work is supported by National Natural Science Foundation of China (31360104), Sheng Tongsheng Innovation Funds (GSAU-STS-1540), and Special Funds for Discipline Construction of Gansu Agricultural University (GAU-XKJS-2018-143).
Author information
Authors and Affiliations
Corresponding author
Appendix: The derivation of inequality (5)
Appendix: The derivation of inequality (5)
We here derive the condition that initial rare population cannot invade empty habitat space (Eq. 5 in text). In terms of the probability theory \(\sum _j {p_{ij} } =p_i \), \(\sum _j {q_{j\left| i \right. } } =1\), \(\sum _i {p_i } =1\), and \(q_{\left. j \right| i} =p_{ij} /p_i \), we can transform Eq. 3 into the following form.
Whether a rare population invades or not depends on the sign of its initial increase rate. It can invade if \((\mathrm{d}p_+ /\mathrm{d}t)/p_+ >0\), otherwise not. We thus know the following invasion condition
In the following, we calculate \(q_{\left. 0 \right| +} \) explicitly. Because initial population is rare (\(p_+ \approx 0)\), we can ignore its influence on spatial environment, and then assume \(\hbox {d}p_- /\mathrm{d}t=0\) and \(\hbox {d}p_{--} /\mathrm{d}t=0\). Thus, letting the right sides of Eqs. A2 and A3 are equal to zero, we obtain
Since local density (e.g., \(q_{+\left| + \right. } \) and \(q_{-\left| + \right. } )\) change much faster than global density [47], we further assume local density reach equilibrium quickly even when population still rare, that is, \(\mathrm{d}q_{+\left| + \right. } /\mathrm{d}t=0\) and \(\mathrm{d}q_{-\left| + \right. } /\mathrm{d}t=0\). Therefore, letting the right sides of Eqs. A4 and A5 are equal to zero, we get the following equalities.
where \(x=q_{+\left| + \right. } \), \(y=q_{-\left| + \right. } \) and \(z=1-q_{+\left| + \right. } -q_{-\left| + \right. } \). Solving Eqs. A8 and A9 with Eq. A7 together, we have
Since f(z) is a monotonically increasing function, from invasion condition (A6) we have \(f(z)>f\left( {\frac{e+d}{c}} \right) \).
After some algebra calculation, we obtain final invasion condition as follows:
where \(\delta =(e+d)/c\), \(\alpha =\lambda /d\), \(\beta =\mu /d\), \(\gamma =e/d\). Initial rare population can invade when the condition (A11) is satisfied, but not when the inequality sign reverses. In the latter case, bistability could occur.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Zhang, D., Song, W., Chen, N. et al. The role of spatial scale in organism–environment positive feedback. Nonlinear Dyn 95, 2019–2029 (2019). https://doi.org/10.1007/s11071-018-4674-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4674-3