
Abstract
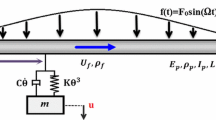
Different from the both-end supported pipe conveying fluid as a conservative system, the cantilevered fluid-transporting pipe is a non-conservative system and its dynamic behavior is more complex with flutter instabilities when the flow velocity is beyond the critical value. Indeed, controlling such a flutter system is always challenging in engineering applications. This study presents nonlinear vibrations of cantilevered pipe conveying fluid passively controlled via a nonlinear energy sink (NES). Based on the Hamilton principle, the nonlinear dynamic equations coupling with the NES are derived and discretized using high-order Galerkin method. It is indicated that increasing the mass and damping of NES results in an increase in critical flow velocity. Importantly, the optimal placed position of NES where the critical flow velocity is highest has a strong relationship with the pipe’s flutter mode. In the following, the nonlinear analysis shows the dynamic controlling effect on vibration amplitude of the pipe can be classified to three suppression regions with increasing the flow velocity. Varying the mass, damping and stiffness of NES is followed by variations of the suppression regions which are associated with controlling effects and dynamic behaviors of the pipe system.
















Similar content being viewed by others
References
Paidoussis, M.P.: Fluid–Structure Interactions: Slender Structures and Axial Flow. Academic Press, London (1998)
Paidoussis, M.P., Issid, N.T.: Dynamic stability of pipes conveying fluid. J. Sound Vib. 33, 267–294 (1974)
Semler, C., Li, G.X., Paidoussis, M.P.: The non-linear equations of motion of pipes conveying fluid. J. Sound Vib. 169, 577–599 (1994)
Benjamin, T.B.: Dynamics of a system of articulated pipes conveying fluid. I. Theory. Proc. R. Soc. Lond. A 261, 57–86 (1961)
Gregory, R.W., Paidoussis, M.P.: Unstable oscillation of tubular cantilevers conveying fluid. I. Theory. Proc. R. Soc. Lond. A 293, 12–27 (1966)
Sinha, J.K., Singh, S., Rao, A.R.: Finite element simulation of dynamic behaviour of an open-ended cantilever pipe conveying fluid. J. Sound Vib. 240, 189–194 (2001)
Ryu, S.U., Sugiyama, Y., Ryu, B.J.: Eigenvalue branches and modes for flutter of cantilevered pipes conveying fluid. Comput. Struct. 80, 1231–1241 (2002)
Olsonl, G., Jamison, D.: Application of a general purpose finite element method to elastic pipes conveying fluid. J. Fluids Struct. 11, 207–222 (1997)
Païdoussis, M.P.: The canonical problem of the fluid-conveying pipe and radiation of the knowledge gained to other dynamics problems across applied mechanics. J. Sound Vib. 310, 462–492 (2008)
Païdoussis, M.P., Li, G.X.: Pipes conveying fluid: a model dynamical problem. J. Fluids Struct. 7, 137–204 (1993)
Seiranyan, A.P.: Collision of eigenvalues in linear oscillatory systems. J. Appl. Math. Mech. 58, 805–813 (1994)
Zhou, X., Dai, H.L., Wang, L.: Dynamics of axially functionally graded cantilevered pipes conveying fluid. Compos. Struct. 190, 112–118 (2018)
He, F., Dai, H.L., Huang, Z., Wang, L.: Nonlinear dynamics of a fluid-conveying pipe under the combined action of cross-flow and top-end excitations. Appl. Ocean Res. 62, 199–209 (2017)
Paidoussis, M.P., Semler, C., Wadham-Gagnon, M., Saaid, S.: Dynamics of cantilevered pipes conveying fluid—part 2: dynamics of the system with intermediate spring support. J. Fluids Struct. 23, 569–587 (2007)
Jin, J.D.: Stability and chaotic motion of a restrained pipe conveying fluid. J. Sound Vib. 208, 427–439 (1997)
Demir, M.H., Yesildirek, A., Yigit, F.: Control of a cantilever pipe conveying fluid using neural network. In: The 6th International Conference on Modeling, Simulation, and Applied Optimization (ICMSAO) (2015)
Yau, C.H., Bajaj, A.K., Nwokah, O.D.I.: Active control of chaotic vibration in a constrained flexible pipe conveying fluid. J. Fluids Struct. 9, 99–122 (1995)
Doki, H., Hiramoto, K., Skelton, R.E.: Active control of cantilevered pipes conveying fluid with constraints on input energy. J. Fluids Struct. 12, 615–628 (1998)
Tsai, Y.K., Lin, Y.H.: Adaptive modal vibration control of a fluid-conveying cantilever pipe. J. Fluids Struct. 11, 535–547 (1997)
Dai, H.L., Wang, L., Ni, Q.: Dynamics of a fluid-conveying pipe composed of two different materials. Int. J. Eng. Sci. 73, 67–76 (2013)
Wang, L., Dai, H.L.: Vibration and enhanced stability properties of fluid-conveying pipes with two symmetric elbows fitted at downstream end. Arch. Appl. Mech. 82, 155–161 (2012)
Firouz-Abadia, R.D., Askariana, A.R., Kheiri, M.: Bending-torsional flutter of a cantilevered pipe conveying fluid with an inclined terminal nozzle. J. Sound Vib. 332, 3002–3014 (2013)
Yu, D., Wen, J., Zhao, H., Liu, Y., Wen, X.: Vibration reduction by using the idea of phononic crystals in a pipe-conveying fluid. J. Sound Vib. 318, 193–205 (2008)
Rechenberger, S., Mair, D.: Vibration control of piping systems and structures using tuned mass dampers. In: Proceedings of the ASME Pressure Vessels and Piping Conference, Waikoloa, Hawaii, USA (2017)
Yu, D.L., Païdoussis, M.P., Shen, H.J., Wang, L.: Dynamic stability of periodic pipes conveying fluid. J. Appl. Mech. 81(1), 011008 (2013)
Vakakis, A.F.: Inducing passive nonlinear energy sinks in vibrating systems. J. Vib. Acoust. 123, 324–332 (2001)
Gendelman, O.V.: Transition of energy to a nonlinear localized mode in a highly asymmetric system of two oscillators. Nonlinear Dyn. 25, 237–253 (2001)
Lee, Y.S., Vakakis, A.F., Bergman, L.A., Mcfarland, D.M., Kerschen, G., Nucera, F., Tsakirtzis, S., Panagopoulos, P.N.: Passive non-linear targeted energy transfer and its applications to vibration absorption: a review. Proc. Inst. Mech. Eng. K J. Multi Body Dyn. 222, 322–329 (2008)
Vakakis, A.F., Manevitch, L.I., Gendelman, O., Bergman, L.: Dynamics of linear discrete systems connected to local, essentially non-linear attachments. J. Sound Vib. 264, 559–577 (2003)
Starosvetsky, Y., Gendelman, O.V.: Response regimes of linear oscillator coupled to nonlinear energy sink with harmonic forcing and frequency detuning. J. Sound Vib. 315, 746–765 (2008)
Yan, Z., Ragab, S.A., Hajj, M.R.: Passive control of transonic flutter with a nonlinear energy sink. Nonlinear Dyn. 91, 577–590 (2018)
Pacheco, D.R.Q., Marques F.D., Ferreira, A.J.M.: Panel flutter suppression with nonlinear energy sinks: numerical modeling and analysis. Int. J. Nonlinear Mech. (2018). https://doi.org/10.1016/j.ijnonlinmec.2018.08.009
Zhang, Y.W., Hou, S., Xu, K.F., Yang, T.Z., Chen, L.Q.: Forced vibration control of an axially moving beam with an attached nonlinear energy sink. Acta Mech. Solida Sin. 30, 674–682 (2017)
Zhang, Y.W., Yuan, B., Fang, B., Chen, L.Q.: Reducing thermal shock-induced vibration of an axially moving beam via a nonlinear energy sink. Nonlinear Dyn. 87, 1159–1167 (2017)
Dai, H.L., Abdelkefi, A., Wang, L.: Vortex-induced vibrations mitigation through a nonlinear energy sink. Commun. Nonlinear Sci. 42, 22–36 (2017)
Georgiades, F., Vakakis, A.F.: Dynamics of a linear beam with an attached local nonlinear energy sink. Commun. Nonlinear Sci. 12, 643–651 (2007)
Yang, T.Z., Yang, X.D., Li, Y., Fang, B.: Passive and adaptive vibration suppression of pipes conveying fluid with variable velocity. J. Vib. Control 20, 1293–1300 (2013)
Mamaghani, A.E., Khadem, S.E., Bab, S.: Vibration control of a pipe conveying fluid under external periodic excitation using a nonlinear energy sink. Nonlinear Dyn. 86, 1761–1795 (2016)
Darabi, A., Michael, J.L.: Clearance-type nonlinear energy sinks for enhancing performance in electroacoustic wave energy harvesting. Nonlinear Dyn. 87(4), 2127–2146 (2017)
Kong, X., Li, H., Chen, W.: Dynamics of 1-dof and 2-dof energy sink with geometrically nonlinear damping: application to vibration suppression. Nonlinear Dyn. 91(1), 733–754 (2018)
Chen, J.E., He, W., Zhang, W., Yao, M., Liu, J., Sun, M.: Vibration suppression and higher branch responses of beam with parallel nonlinear energy sinks. Nonlinear Dyn. 91(2), 885–904 (2018)
Snowdon, J.C.: Vibration and Shock in Damped Mechanical Systems. Wiley, New York (1968)
Paidoussis, M.P., Semler, C.: Nonlinear dynamics of fluid-conveying cantilevered pipe with an intermediate spring support. J. Fluids Struct. 7, 295–298 (1993)
García-Vallejo, D., Mayo, J., Escalona, J.L.: Efficient evaluation of the elastic forces and the Jacobian in the absolute nodal coordinate formulation. Nonlinear Dyn. 35, 313–329 (2004)
Acknowledgements
The authors acknowledge the support provided by Science and Technology on Reactor System Design Technology Laboratory, Fundamental Research Funds for the Central Universities, HUST (2017KFYXJJ135), Natural Science Foundation of Hubei Province (2017CFB429) and National Natural Science Foundation of China (Nos. 11602090, 11672115 and 11872060).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
They have no conflict of interest.
Ethical standard
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards.
Human and animal rights
This article does not contain any studies with animals performed by any of the authors.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Appendix
Appendix
In this part, we offer the elements of matrices written in Sect. 3 in detail and also introduce a kind of algebraic relationship to simplify the derived nonlinear damping and stiffness matrices. Firstly, through some further manipulations, the mass, linear damping, nonlinear damping, linear stiffness and nonlinear stiffness matrices can be written as follows:
It is noted that the nonlinear damping and stiffness matrices are as a function of \({{\varvec{q}}}\) and \({{\dot{{\varvec{q}}}}}\), which will bring a large number of integrals in each step and hence a high calculation consumption. Thus, in this work, we introduce the following algebraic relationship to solve this calculation problem [44]:
where matrix \({{\varvec{C}}}^{ij}\) is built as follows:
in which \({{\varvec{A}}}\) and \({{\varvec{B}}}\) are two arbitrary square matrices, \({{\varvec{q}}}\) and \({{\varvec{p}}}\) are two arbitrary array. Equations. (A.2) and (A.3) indicate that the products of form \({{\varvec{Aqp}}}^{{{\varvec{T}}}}{{\varvec{B}}}\) are matrices whose components can be written in the form of \({{\varvec{q}}}^\mathrm{T}{{\varvec{C}}}^{ij}{{\varvec{p}}}\). \({{\varvec{C}}}^{ij}\) is a matrix as the product of the transposition of row i of matrix \({{\varvec{A}}}\) and row j of matrix \({{\varvec{B}}}^\mathrm{T}\).
Using Eqs. (A.2) and (A.3), we can get the components of nonlinear damping and stiffness matrices in Eq. (A.1) as follows:
where
Rights and permissions
About this article

Cite this article
Zhou, K., Xiong, F.R., Jiang, N.B. et al. Nonlinear vibration control of a cantilevered fluid-conveying pipe using the idea of nonlinear energy sink. Nonlinear Dyn 95, 1435–1456 (2019). https://doi.org/10.1007/s11071-018-4637-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4637-8