
Abstract
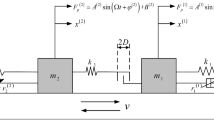
The study of dynamical systems subjected to friction force is of both fundamental and practical importance. In this work, the numerical investigation of the dynamics of a three-mass system where the middle mass slides on a moving track and the two other masses slide on stationary tracks is presented. Friction between the tracks and masses is considered. It is found that the all-stick state, where all masses stick to the tracks, plays a critical role in the qualitative behaviour of the unforced dynamics where period-adding and subcritical graze-sliding bifurcation are observed. The forced vibration due to a harmonic excitation is quasiperiodic in nature. Chaos emerges from large forcing amplitude via a likely Ruelle–Takens route and an exotic route evolved directly from a periodic orbit.









Similar content being viewed by others

References
Jeffrey, M.R., Hogan, S.J.: The geometry of generic sliding bifurcations. SIAM Rev. 53, 505–525 (2011)
Colombo, A., di Bernardo, M., Hogan, S.J., Jeffrey, M.R.: Bifurcations of piecewise smooth flows: perspectives, methodologies and open problems. Physica D 241, 1845–1860 (2012)
di Bernardo, M., Budd, C., Champneys, A.R., Kowalczyk, P.: Piecewise-Smooth Dynamical Systems: Theory and Applications. Springer, London (2008)
Andronov, A.A., Khaikin, S.E., Vitt, A.A.: Theory of Oscillators, Chapter 10. Pergamon Press, Oxford (1965)
Den Hartog, J.P.: Forced vibrations with combined coulomb and viscous friction. ASME APM–53–9, 107–115 (1931)
Shaw, S.W.: On the dynamic response of a system with dry friction. J. Sound Vib. 198, 305–325 (1986)
Leine, R.I., Van Campen, D.H., de Kracker, A., Van Den Steen, L.: Stick–slip vibrations induced by alternate friction models. Nonlinear Dyn. 16, 41–54 (1998)
Wikiel, B., Hill, J.M.: Stick–slip motion of two coupled masses with side friction. Int. J. Nonlinear Mech. 35, 953–962 (2000)
Olejnik, P., Awrejcewicz, J.: An approximation method for the numerical solution of planar discontinuous dynamical systems with stick–slip friction. Appl. Math Sci. 8, 7213–7238 (2014)
Blau, P.J.: Friction. In: Wang, Q.J., Chung, Y.-W. (eds.) History of Research, Encyclopedia of Tribology. Springer, New York (2013)
Hinriches, N., Oestreich, M., Popp, K.: On the modelling of friction oscillators. J. Sound Vib. 216, 435–459 (1998)
Nusse, H.E., Yorke, J.A.: Border-collision bifurcations for piecewise smooth one-dimensional maps. Int. J. Bifurcat. Chaos 5, 189–207 (1995)
Zimmermann, K., Zeidis, I., Pivovarov, M.: Motion of a chain of three point masses on a rough plane under kinematical constraints. In: Awrejcewicz, J. (ed.) Modeling, Simulation and Control of Nonlinear Engineering Dynamical Systems, pp. 61–70. Springer, Dordrecht (2009)
Burridge, R., Knopoff, L.: Model and theoretical seismicity. Bull. Seismol. Soc Am. 57, 341–371 (1967)
Avrutin, V., Schanz, M.: On multi-parametric bifurcations in a sclar piecewise-linear map. Nonlinearity 19, 531–552 (2006)
Avrutin, V., Schanz, M.: On the scaling properties of the period-increment scenario in dynamical systems. Chaos Solitons Fractals 11, 1949–1955 (2000)
Granados, A., Alseda, L., Krups, M.: The period adding and incrementing bifurcations: from rotation theory to applications. SIAM Rev. 59, 225–292 (2017)
Rulle, D., Takens, F.: On the nature of turbulence. Commun. Math. Phys. 20, 167–192 (1971)
Newhouse, S., Ruelle, D., Takens, F.: Occurrence of strange Axiom A attractors near quasiperiodic flows on \(T^m, m\ge 3\). Commun. Math. Phys. 1, 35–40 (1978)
MATLAB: The MathWorks, Inc., 3 Apple Hill Dr., Natick, MA 01760 (2016)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest.
Appendices
Appendix A
The sticking region for the mass \(m_{1,2}\) is defined by
and \(\Phi _{is}^\pm =\pm \, F_{is}/kd\) for \(i=1,2\). The boundary is therefore determined by
In general, there are two complex solutions and one real solution for (B.2). The real solution takes the form
and
It is important to note that the value of \(q_{i,ss}\) determines the size of the intersection \(\Sigma _{18}\cap \Sigma _{28}\). In this case, (B.4) implies that the size of the all-stick region is related to parameters \(\alpha ,\beta \) and the static friction. In particular, \(\mathrm{diam}(\Sigma _{18}\cap \Sigma _{28})\sim \Phi _{is}^{1/3}\). The size of the all-stick region is also determined by \(\Sigma _{38}\) where the factor of \(\Gamma \) will come into play. For \(\Phi _{1s,2s}=0.105\), \(q_{i,ss}=0.1326\) and, for \(\Phi _ {1s,2s}=0.25\), \(q_{i,ss}=0.3124\) (the case shown in Fig. 6).
Appendix B
The scientific computational package MATLAB is used to carry out the numerical simulation [20]. For the current system, a 3-digit array holding the value 0 or 1 was used to keep track of the transition between the slip/stick states defined by the 8 regions \(S_{{\mathbb {N}}_\ell },\ell =1\ldots 8\). The integration routine ode45 in MATLAB is used where the potential transition is triggered by the event function: \(\{y_1'=0\}\vee \{y_2'=0\}\vee \{y_3'-V_0=0\}\). The zero-crossing detection of the event function follows the false-position or regula falsi method (odezero). As it is set in MATLAB by default that the event function is called every time a successful integration is achieved, the simulation could potentially be slowed down significantly simply because of the velocity passes through zero. To circumvent this issue, additional codes were added in ode45 to check if the stick/slip transition actually occurs. The integration would be allowed to continue without interruption if the static friction force is overcome. It should be noted that ode45 is based on the, forward, explicit integration scheme. It is necessary to set small tolerances in order to find consistent result (typically in the range of \(\le 10^{-8}\)). All simulations were carried out for \(t\le 15{,}000\), and the results are shown after transient period is skipped.
Rights and permissions
About this article

Cite this article
Lin, D.C., Oguamanam, D.C.D. A numerical study of the dynamics of three-mass system on frictional tracks. Nonlinear Dyn 94, 2047–2058 (2018). https://doi.org/10.1007/s11071-018-4474-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4474-9