
Abstract
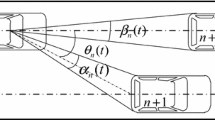
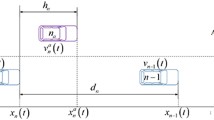
This study proposes a new car-following model that considers the effects of two-sided lateral gaps on a road without lane discipline. In particular, a car-following model is proposed to capture the impacts from the lateral gaps of the leading vehicles on both sides of the following vehicle. Linear stability analysis of the proposed model is performed using the perturbation method to obtain the stability condition. Nonlinear analysis is performed using the reductive perturbation method to derive the modified Korteweg de Vries equation to describe the density wave propagation. Results from numerical experiments illustrate that the proposed car-following model has larger stable region compared to a car-following model that considers the effect of lateral gap on only one side. Also, it is able to more rapidly dissipate the effect of a perturbation such as a sudden stimulus from a leading vehicle. In addition, the findings of this study provide insights in analyzing system performance of a non-lane-discipline road system in the future.




Similar content being viewed by others

References
Chandler, R.E., Herman, R., Montroll, E.W.: Traffic dynamics: studies in car following. Op. Res. 6(2), 165–184 (1958)
Kurt, E., Busse, F.H., Pesch, W.: Hydromagnetic convection in a rotating annulus with an azimuthal magnetic field. Theor. Comput. Fluid Dyn. 18(2–4), 251–263 (2004)
Kurt, E., Pesch, W., Busse, F.H.: Pattern formation in the rotating cylindrical annulus with an azimuthal magnetic field at low Prandtl numbers. J. Vib. Control 13(9–10), 1321–1330 (2007)
Hoogendoorn, S.P., Bovy, P.H.L.: State-of-the-art of vehicular traffic flow modelling. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 215(4), 283–303 (2001)
Darbha, S., Rajagopal, K.R., Tyagi, V.: A review of mathematical models for the flow of traffic and some recent results. Nonlinear Anal. 69, 950–970 (2008)
Ossen, S., Hoogendoorn, S.P.: Heterogeneity in car-following behavior: theory and empirics. Transp. Res. Part C Emerg. Technol. 19(2), 182–195 (2011)
Wilson, R.E., Ward, J.A.: Car-following models: fifty years of linear stability analysis-a mathematical perspective. Transp. Plann. Technol. 34(1), 3–18 (2011)
Li, Y., Sun, D.: Microscopic car-following model for the traffic flow: the state of the art. J. Control Theor. Appl. 10(2), 133–143 (2012)
Bando, M., Hasebe, K., Nakayama, A., Shibata, A., Sugiyama, Y.: Dynamics model of traffic congestion and numerical simulation. Phys. Rev. E 1(51), 1035–1042 (1995)
Helbing, D., Tilch, B.: Generalized force model of traffic dynamics. Phys. Rev. E 58, 133–138 (1998)
Treiber, M., Hennecke, A., Helbing, D.: Derivation, properties and simulation of a gas-kinetic-based nonlocal traffic model. Phys. Rev. E 59, 239–253 (1999)
Jiang, R., Wu, Q.S., Zhu, Z.J.: Full velocity difference model for a car-following theory. Phys. Rev. E 64, 017101–017105 (2001)
Jiang, R., Wu, Q.S., Zhu, Z.J.: A new continuum model for traffic flow and numerical tests. Transp. Res. Part B 36, 405–419 (2002)
Zhao, X.M., Gao, Z.Y.: A new car-following model: full velocity and acceleration difference model. Eur. Phys. J. B 47, 145–150 (2005)
Wang, T., Gao, Z.Y., Zhao, X.M.: Multiple velocity difference model and its stability analysis. Acta Phys. Sin. 55, 634–638 (2006)
Xie, D.F., Gao, Z.Y., Zhao, X.M.: Stabilization of traffic flow based on the multiple information of preceding cars. Commun. Comput. Phys. 3(4), 899–912 (2008)
Li, Y., Sun, D., Liu, W., Zhang, M., Zhao, M., Liao, X., Tang, L.: Modeling and simulation for microscopic traffic flow based on multiple headway, velocity and acceleration difference. Nonlinear Dyn. 66(1–2), 15–28 (2011)
Tang, T., Li, C., Wu, Y., Huang, H.: Impact of the honk effect on the stability of traffic flow. Phys. A Stat. Mech. Appl. 390(20), 3362–3368 (2011)
Tang, T., Wu, Y., Caccetta, L., Huang, H.: A new car-following model with consideration of roadside memorial. Phys. Lett. A 375(44), 3845–3850 (2011)
Tang, T., Wang, Y., Yang, X., Wu, Y.: A new car-following model accounting for varying road condition. Nonlinear Dyn. 70(2), 1397–1405 (2012)
Li, Y., Zhu, H., Cen, M., Li, Y., Li, R., Sun, D.: On the stability analysis of microscopic traffic car-following model: a case study. Nonlinear Dyn. 74(1–2), 335–343 (2013)
Tang, T., Li, J., Huang, H., Yang, X.: A car-following model with real-time road conditions and numerical tests. Measurement 48, 63–76 (2014)
Tang, T., Shi, W., Shang, H., Wang, Y.: A new car-following model with consideration of inter-vehicle communication. Nonlinear Dyn. 76(4), 2017–2023 (2014)
Chandra, S., Kumar, U.: Effect of lane width on capacity under mixed traffic conditions in India. J. Transp. Eng. 129(2), 155–160 (2003)
Jin, S., Wang, D., Tao, P., Li, P.: Non-lane-based full velocity difference car following model. Phys. A Stat. Mech. Appl. 389(21), 4654–4662 (2010)
Gunay, B.: Car following theory with lateral discomfort. Transp. Res. Part B 41, 722–735 (2007)
Monteil, J., Billot, R., Sau, J., EI Faouzi, N.E.: Linear and weakly nonlinear stability analyses of cooperative car-following models. IEEE Trans. Intell. Transp. Syst. (2014). doi:10.1109/TITS.2014.2308435
Kurtz, D.A., Hong, D.C.: Traffic jams, granular flow, and soliton selection. Phys. Rev. E 52(1), 218–221 (1995)
Komatsu, T.S., Sasa, S.: Kink soliton characterizing traffic congestion. Phys. Rev. E 52(5), 5574–5582 (1995)
Nagatani, T.: Stabilization and enhancement of traffic flow by the next-nearest-neighbor interaction. Phys. Rev. E 60(6), 6395–6401 (1999)
Li, Z.P., Liu, Y.C., Liu, F.Q.: A dynamical model with next-nearest-neighbor interaction in relative velocity. Int. J. Mod. Phys. C 18, 819–832 (2007)
Ge, H.X., Cheng, R.J., Dai, S.Q.: KdV and kink-antikink solitons in car-following models. Phys. A 357, 466–476 (2005)
Lei, Y., Shi, Z.K.: Nonlinear analysis of an extended traffic flow model in ITS environment. Chaos Solitons Fractals 36, 550–558 (2008)
Yu, L., Shi, Z.K., Zhou, B.C.: Kink-antikink density wave of an extended car-following model in a cooperative driving system. Commun. Nonlinear Sci. Numer. Simul. 13, 2167–2176 (2008)
Kurtze, D.A.: Solitons and kinks in a general car-following model. Phys. Rev. E 88(3), 032804–032815 (2013)
Lv, F., Zhu, H., Ge, H.: TDGL and mKdV equations for car-following model considering driver’s anticipation. Nonlinear Dyn. 77(4), 1–6 (2014)
Acknowledgments
Thanks go to the support from the project by the National Natural Science Foundation of China (Grant Nos. 61304197, 61304205), the Scientific and Technological Talents Project of Chongqing (Grant No. cstc2014kjrc-qnrc30002) and the US Department of Transportation through the NEXTRANS Center, the USDOT Region 5 University Transportation Center. The authors are solely responsible for the contents of this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, Y., Zhang, L., Peeta, S. et al. Non-lane-discipline-based car-following model considering the effects of two-sided lateral gaps. Nonlinear Dyn 80, 227–238 (2015). https://doi.org/10.1007/s11071-014-1863-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1863-6