
Abstract
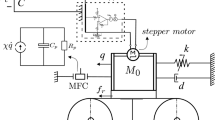
We consider a system composed of two masses connected by linear springs. One of the masses is in contact with a driving belt moving at a constant velocity. Friction force, with Coulomb’s characteristics, acts between the mass and the belt. Moreover, the mass is also subjected to a harmonic external force. Several periodic orbits including stick phases and slip phases are obtained. In particular, the existence of periodic orbits including a part where the mass in contact with the belt moves in the same direction at a higher speed than the belt itself is proved. Non-sticking orbits are also found for a non-moving belt. We prove that this kind of solution is symmetric in space and in time.




Similar content being viewed by others
References
Andreaus, U., Casini, P.: Dynamics of friction oscillators excited by a moving base and/or driving force. J. Sound Vib. 245(4), 685–699 (2001)
Csernak, G., Stepan, G.: On the periodic response of a harmonically excited dry friction oscillator. J. Sound Vib. 295(4), 649–658 (2006)
Hong, H.K., Liu, C.S.: Non-sticking oscillation formulae for Coulomb friction under harmonic loading. J. Sound Vib. 244(5), 883–898 (2001)
Galvanetto, U., Bishop, S.R.: Stick-slip vibrations of a 2-degree-of-freedom geophysical fault model. Int. J. Mech. Sci. 36(8), 683–698 (1994)
Pascal, M.: Dynamics of coupled oscillators excited by dry friction. J. Comput. Nonlinear Dyn. 3(3), 20–26 (2008)
Pascal, M.: Two models of non smooth dynamical systems. Int. J. Bifurc. Chaos 21(10), 2853–2860 (2011)
Pascal, M.: New events in stick-slip oscillators behaviour. J. Appl. Math. Mech. 75(3), 402–409 (2011)
Shaw, S.W.: On the dynamic response of a system with dry friction. J. Sound Vib. 108(2), 305–325 (1986)
Teufel, A., Steindl, A., Troger, H.: On non smooth bifurcations in a simple friction oscillator. PAMM 5, 139–140 (2005)
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1

The natural frequencies (ω 1,ω 2) are the roots of the characteristic equation:

The eigenvectors  , (j=1,2) are defined by \((K-I\omega_{j}^{2})\psi_{j}=0\).
, (j=1,2) are defined by \((K-I\omega_{j}^{2})\psi_{j}=0\).
These matrices fulfil the following property:

The matrices Γ i (t) fulfil also the property:
Appendix 2
For τ/2<t<τ, the periodic solution is defined by
From the identities:
the first relation (17) is deduced.
For T/2<t 1<T, the solution is defined by
From the identities:
the last relation (17) follows.
Appendix 3
Appendix 4
From (5), (19) and (30), the non-sticking periodic orbit obtained with the assumption that τ=π/ω=Θ/2 is described by

Taking into account the properties
the symmetry of the motion is deduced:
Appendix 5
Let us consider the same kind of non-sticking periodic orbits as in Sect. 6, with V=0 but without the assumption τ=Θ/2.
For 0<t<τ, the motion is given by (5), while for τ<t<Θ, the motion is described by

A periodic motion of period Θ=2π/ω is obtained if Z(Θ)=Z 0 or:
From (56), we deduce:
From the relations:
it follows:
On the other hand, it is not difficult to show that
Let us introduce the following notations:

From (60), it results:
The relations X 1=X 2,Y 1=Y 2, deduced from (61) are equivalent to:
From (64), two cases are obtained:
-
1.
Det(P)≠0 leads to X 1=0, hence
$$ X_{2} = 0,\qquad Y_{1} = 0,\qquad Y_{2} = 0 $$(65)$$ \begin{array}{l} z_{B} - Q\cos\varphi_{B} = z_{0} - Q\cos\varphi, \\[6pt] z'_{B} + Q\omega\sin\varphi_{B} = - \bigl(z'_{0} + Q\omega\sin\varphi\bigr), \\[6pt]\ \bar{z}_{B} - Q\cos\varphi_{B} = \bar{z}_{0} - Q\cos\varphi \end{array} $$(66)From the relation:
$$ \begin{array}{l} z'_{B} = - Q\omega\sin\varphi_{B} - \bigl(z'_{0} + Q\omega\sin\varphi\bigr), \\[6pt] z'_{2B} = z'_{20} = 0 \end{array} $$(67)we obtain sinφ B =−sinφ, hence

In the first case, (φ B ≡−φ,φ=−ωτ/2), from (67) \(z'_{B} = - z'_{0}\) and from (66):
$$z_{B} = z_{0} - Q\cos\varphi + Q\cos\varphi_{B} = z_{0} $$which is impossible because for 0<t<τ, \(z'_{2}<0\), hence: z 2B <z 20.
In the second case, (τ=π/ω=τ 1), hence H i =h i , i=1,2,3
$$z_{B} + Q\cos\varphi = z_{0} - Q\cos\varphi,\quad \hbox{i.e.}, $$x B +Qcosφ=x 0−Qcosφ.
From (56), we get
$$ \begin{array}{l} z_{B} + \bar{z}_{B} + 2Q\cos\varphi \\[6pt] \quad = H_{1}(z_{0} + \bar{z}_{0} - 2Q\cos\varphi)\quad \hbox{i.e.}\\[6pt] x_{B} + Q\cos\varphi \\[6pt] \quad = H_{1}(x_{0} - Q\cos\varphi) = x_{0} - Q\cos\varphi \end{array} $$(68)Hence, if det(H 1−I)≠0, we obtain
$$ x_{0} = Q\cos\varphi,\qquad x_{B} = - Q\cos\varphi = - x_{0} $$(69) -
2.
Det(P)=0
From \(P=H_{2}^{-1}(H_{1}+I)+h_{2}^{ - 1}(h_{1} + I)\): we deduce
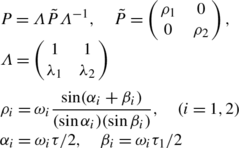 (70)
(70)It results Det(P)=0 if sin(α i +β i )≡sin(ω i π/ω)=0, i.e., ω i =kω, (k=1,2,…) (resonance).
Except this particular case of resonance with the natural frequencies of the system, only symmetrical periodic solutions with a phase of slipping motion and a phase of overshooting motion exist.


Rights and permissions
About this article
Cite this article
Pascal, M. New limit cycles of dry friction oscillators under harmonic load. Nonlinear Dyn 70, 1435–1443 (2012). https://doi.org/10.1007/s11071-012-0545-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0545-5