
Abstract
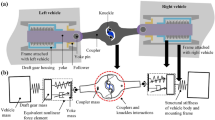
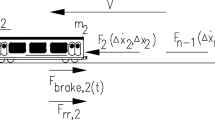
Car coupler forces have a significant effect on the longitudinal train dynamics and stability. Because the coupler inertia is relatively small in comparison with the car inertia; the high stiffness associated with the coupler components can lead to high frequencies that adversely impact the computational efficiency of train models. The objective of this investigation is to study the effect of the coupler inertia on the train dynamics and on the computational efficiency as measured by the simulation time. To this end, two different models are developed for the car couplers; one model, called the inertial coupler model, includes the effect of the coupler inertia, while in the other model, called the noninertial model, the effect of the coupler inertia is neglected. Both inertial and noninertial coupler models used in this investigation are assumed to have the same coupler kinematic degrees of freedom that capture geometric nonlinearities and allow for the relative translation of the draft gears and end of car cushioning (EOC) devices as well as the relative rotation of the coupler shank. In both models, the coupler kinematic equations are expressed in terms of the car body and coupler coordinates. Both the inertial and noninertial models used in this study lead to a system of differential and algebraic equations that are solved simultaneously in order to determine the coordinates of the cars and couplers. In the case of the inertial model, the coupler kinematics is described using the absolute Cartesian coordinates, and the algebraic equations describe the kinematic constraints imposed on the motion of the system. In this case of the inertial model, the constraint equations are satisfied at the position, velocity, and acceleration levels. In the case of the noninertial model, the equations of motion are developed using the relative joint coordinates, thereby eliminating systematically the algebraic equations that represent the kinematic constraints. A quasistatic force analysis is used to determine a set of coupler nonlinear force algebraic equations for a given car configuration. These nonlinear force algebraic equations are solved iteratively to determine the coupler noninertial coordinates which enter into the formulation of the equations of motion of the train cars. The results obtained in this study showed that the neglect of the coupler inertia eliminates high frequency oscillations that can negatively impact the computational efficiency. The effect of these high frequencies that are attributed to the coupler inertia on the simulation time is examined using frequency and eigenvalue analyses. While the neglect of the coupler inertia leads, as demonstrated in this investigation, to a much more efficient model, the results obtained using the inertial and noninertial coupler models show good agreement, demonstrating that the coupler inertia can be neglected without having an adverse effect on the accuracy of the solution.
Similar content being viewed by others

References
Arnold, M., Burgermeister, B., Weber, S.: Improved time integration of multibody system models. In: The 1st Joint International Conference on Multibody System Dynamics, Lappeenranta, Finland (2010)
Brigham, E.O.: The Fast Fourier Transform. Prentice-Hall, Englewood Cliffs (1974)
Burgermeister, B., Arnold, M., Eichberger, A.: A quasi-static approach for constrained systems in real-time simulation. In Proc. Appl. Math. Mech., p. 7. Wiley-VCH, Weinheim (2007)
Cole, C., Sun, Y.Q.: Simulated comparisons of wagon coupler systems in heavy haul trains. Proc. IMechE, F, J. Rail Rapid Transit, 220, 247–256 (2006)
Dawson, R.W.: The Car and Locomotive Cyclopedia, 6th edn., Sect. 6, pp. 639–703. Simmons Boardman, Omaha (1997)
Durali, M., Shadmehri, B.: Nonlinear analysis of train derailment in severe braking. J. Dyn. Syst. Meas. Control 125, 48–53 (2003)
Genta, G.: Vibration Dynamics and Control. Springer, New York (2009)
Janney, E.: Improvement in car couplings, US Patent 138,405, 29 April, 1873
Roberson, R.E., Schwertassek, R.: Dynamics of Multibody Systems. Springer, Berlin (1988)
Roberts, N.L.: Coupler. US Patent 4,245,747, 20 January, 1981
Sanborn, G.G., Heineman, J.R., Shabana, A.A.: A low computational cost nonlinear formulation for multibody railroad vehicle systems. In: Proceedings of the ASME International Design Engineering Technical Conferences & Computer and Information in Engineering Conference, Las Vegas, NV, September 4–7, 2007
Shabana, A.A.: Vibration of Discrete and Continuous Systems. Springer, New York (1997)
Shabana, A.A.: Computational Dynamics, 3rd edn. Wiley, New York (2010)
Shabana, A.A., Sany, J.R.: An augmented formulation for mechanical system with non-generalized coordinates: application to rigid body contact problems. Nonlinear Dyn. 24, 183–204 (2001)
Shabana, A.A., Zaazaa, K.E., Sugiyama, H.: Railroad Vehicle Dynamics: A Computational Approach. Francis & Taylor/RC, Boca Raton (2008)
Shabana, A.A., Aboubakr, A.K., Ding, L.: Development of a new train coupler model using non-inertial coordinates. Technical Report #MBS2010-6-UIC, Department of Mechanical Engineering, University of Illinois at Chicago, Chicago (2010)
Snell, F.: Railway coupler shank. US Patent 3,860,121, 14 January, 1945
Stronati, L.: A coupler model for the analysis of longitudinal train forces. M.Sc. Thesis, Department of Mechanical Engineering, University of Illinois at Chicago, Chicago (2010)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Massa, A., Stronati, L., Aboubakr, A.K. et al. Numerical study of the noninertial systems: application to train coupler systems. Nonlinear Dyn 68, 215–233 (2012). https://doi.org/10.1007/s11071-011-0220-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-011-0220-2